目标跟踪之sort算法(3)
这里写目录标题
- 1 流程
- 1 预处理
- 2 跟踪
- 2 代码
参考:sort代码 https://github.com/abewley/sort
1 流程
1 预处理
1.1 获取离线检测数据。1.2 实例化跟踪器。
2 跟踪
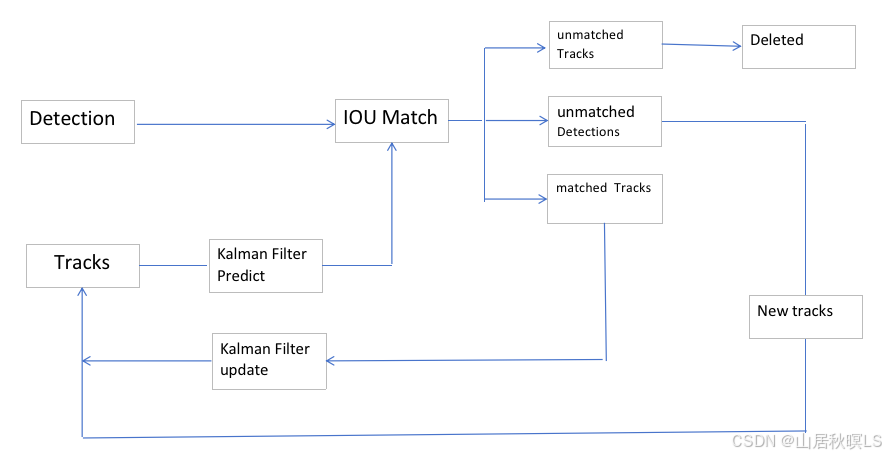
2.1 轨迹处理。根据上一帧的轨迹预测当前帧的轨迹,剔除到当前轨迹中为空的轨迹得到当前有效轨迹。
2.2 匹配。用匈牙利算法对有效轨迹和检测框匹配,得到匹配id、新检测id、未匹配ida. 如果跟踪器的个数为零,即第一帧图像,返回值为0的匹配id、新检测id、值为0的未匹配id。b. 如果跟踪器的个数为不为0,则计算检测框与当前轨迹的iou,如果iou不为空,得到iou大于阈值的掩码矩阵,判断掩码矩阵每行是否跟每列是一一对应,如果是则不需要匈牙利算法匹配;反之,用匈牙利算法得到匹配的检测框和轨迹的索引。c. 根据匹配索引得到新检测的框的id和为匹配的轨迹的id。d.根据iou再筛选一次。
2.3 更新轨迹。a. 对匹配上的轨迹,根据匹配id得到当前帧的最优估计。b. 添加新的检测。对于没有被匹配上的检测框生成新的跟踪器,并添加到轨迹中。c. 筛选轨迹。
2 代码
""" sort代码 https://github.com/abewley/sortSORT: A Simple, Online and Realtime TrackerCopyright (C) 2016-2020 Alex Bewley alex@bewley.aiThis program is free software: you can redistribute it and/or modifyit under the terms of the GNU General Public License as published bythe Free Software Foundation, either version 3 of the License, or(at your option) any later version.This program is distributed in the hope that it will be useful,but WITHOUT ANY WARRANTY; without even the implied warranty ofMERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See theGNU General Public License for more details.You should have received a copy of the GNU General Public Licensealong with this program. If not, see <http://www.gnu.org/licenses/>.-i https://pypi.tuna.tsinghua.edu.cn/simple
filterpy==1.4.5
scikit-image==0.14.0
lap==0.4.0
numba==0.38.1
scikit-learn==0.19.1
"""
from __future__ import print_functionimport os
import numpy as np
import matplotlib
matplotlib.use('TkAgg')
import matplotlib.pyplot as plt
import matplotlib.patches as patches
from skimage import ioimport glob
import time
import argparse
from filterpy.kalman import KalmanFilternp.random.seed(0)def linear_assignment(cost_matrix):try:import lap_, x, y = lap.lapjv(cost_matrix, extend_cost=True)return np.array([[y[i],i] for i in x if i >= 0])except ImportError:from scipy.optimize import linear_sum_assignmentx, y = linear_sum_assignment(cost_matrix)return np.array(list(zip(x, y)))def iou_batch(bb_test, bb_gt):"""From SORT: Computes IOU between two bboxes in the form [x1,y1,x2,y2]"""bb_gt = np.expand_dims(bb_gt, 0)bb_test = np.expand_dims(bb_test, 1)xx1 = np.maximum(bb_test[..., 0], bb_gt[..., 0])yy1 = np.maximum(bb_test[..., 1], bb_gt[..., 1])xx2 = np.minimum(bb_test[..., 2], bb_gt[..., 2])yy2 = np.minimum(bb_test[..., 3], bb_gt[..., 3])w = np.maximum(0., xx2 - xx1)h = np.maximum(0., yy2 - yy1)wh = w * ho = wh / ((bb_test[..., 2] - bb_test[..., 0]) * (bb_test[..., 3] - bb_test[..., 1]) + (bb_gt[..., 2] - bb_gt[..., 0]) * (bb_gt[..., 3] - bb_gt[..., 1]) - wh) return(o) def convert_bbox_to_z(bbox):"""Takes a bounding box in the form [x1,y1,x2,y2] and returns z in the form[x,y,s,r] where x,y is the centre of the box and s is the scale/area and r isthe aspect ratio"""w = bbox[2] - bbox[0]h = bbox[3] - bbox[1]x = bbox[0] + w/2.y = bbox[1] + h/2.s = w * h #scale is just arear = w / float(h)return np.array([x, y, s, r]).reshape((4, 1))def convert_x_to_bbox(x,score=None):"""Takes a bounding box in the centre form [x,y,s,r] and returns it in the form[x1,y1,x2,y2] where x1,y1 is the top left and x2,y2 is the bottom right"""w = np.sqrt(x[2] * x[3])h = x[2] / wif(score==None):return np.array([x[0]-w/2.,x[1]-h/2.,x[0]+w/2.,x[1]+h/2.]).reshape((1,4))else:return np.array([x[0]-w/2.,x[1]-h/2.,x[0]+w/2.,x[1]+h/2.,score]).reshape((1,5))class KalmanBoxTracker(object):"""This class represents the internal state of individual tracked objects observed as bbox."""count = 0def __init__(self,bbox):"""Initialises a tracker using initial bounding box."""#define constant velocity modelself.kf = KalmanFilter(dim_x=7, dim_z=4) self.kf.F = np.array([[1,0,0,0,1,0,0],[0,1,0,0,0,1,0],[0,0,1,0,0,0,1],[0,0,0,1,0,0,0], [0,0,0,0,1,0,0],[0,0,0,0,0,1,0],[0,0,0,0,0,0,1]])self.kf.H = np.array([[1,0,0,0,0,0,0],[0,1,0,0,0,0,0],[0,0,1,0,0,0,0],[0,0,0,1,0,0,0]])self.kf.R[2:,2:] *= 10.self.kf.P[4:,4:] *= 1000. #give high uncertainty to the unobservable initial velocitiesself.kf.P *= 10.self.kf.Q[-1,-1] *= 0.01self.kf.Q[4:,4:] *= 0.01self.kf.x[:4] = convert_bbox_to_z(bbox)self.time_since_update = 0self.id = KalmanBoxTracker.countKalmanBoxTracker.count += 1self.history = []self.hits = 0self.hit_streak = 0self.age = 0def update(self,bbox):"""Updates the state vector with observed bbox."""self.time_since_update = 0self.history = []self.hits += 1self.hit_streak += 1 # 连续匹配并更新的次数self.kf.update(convert_bbox_to_z(bbox))def predict(self):"""Advances the state vector and returns the predicted bounding box estimate."""if((self.kf.x[6]+self.kf.x[2])<=0):self.kf.x[6] *= 0.0self.kf.predict()self.age += 1if(self.time_since_update>0): # 上一次更新距离现在的时间self.hit_streak = 0 # 匹配次数归0self.time_since_update += 1 # 轨迹只预测没有匹配的的次数➕1self.history.append(convert_x_to_bbox(self.kf.x))return self.history[-1]def get_state(self):"""Returns the current bounding box estimate."""return convert_x_to_bbox(self.kf.x)def associate_detections_to_trackers(detections,trackers,iou_threshold = 0.3):"""Assigns detections to tracked object (both represented as bounding boxes)Returns 3 lists of matches, unmatched_detections and unmatched_trackers"""if(len(trackers)==0):return np.empty((0,2),dtype=int), np.arange(len(detections)), np.empty((0,5),dtype=int)iou_matrix = iou_batch(detections, trackers)if min(iou_matrix.shape) > 0:a = (iou_matrix > iou_threshold).astype(np.int32)if a.sum(1).max() == 1 and a.sum(0).max() == 1:matched_indices = np.stack(np.where(a), axis=1) # 如果正好是一个检测与一个轨迹匹配,则找出匹配的索引else:matched_indices = linear_assignment(-iou_matrix) # 匈牙利匹配,matched_indices存储的是每个检测框对应的轨迹,第一列存储的是检测框的id;第二列存储的是检测框匹配的轨迹idelse:matched_indices = np.empty(shape=(0,2)) unmatched_detections = [] # 寻找没有被匹配上的检测框for d, det in enumerate(detections): # 这一步写的麻烦,不用枚举if(d not in matched_indices[:,0]):unmatched_detections.append(d)unmatched_trackers = [] # 寻找没有被匹配上的轨迹for t, trk in enumerate(trackers):if(t not in matched_indices[:,1]):unmatched_trackers.append(t)#filter out matched with low IOUmatches = [] # 寻找被匹配上的检测框的idfor m in matched_indices: # 根据iou再进行一次筛选if(iou_matrix[m[0], m[1]]<iou_threshold):unmatched_detections.append(m[0])unmatched_trackers.append(m[1])else:matches.append(m.reshape(1,2))if(len(matches)==0):matches = np.empty((0,2),dtype=int)else:matches = np.concatenate(matches,axis=0)return matches, np.array(unmatched_detections), np.array(unmatched_trackers)class Sort(object):def __init__(self, max_age=1, min_hits=3, iou_threshold=0.3):"""Sets key parameters for SORT"""self.max_age = max_ageself.min_hits = min_hitsself.iou_threshold = iou_thresholdself.trackers = []self.frame_count = 0def update(self, dets=np.empty((0, 5))):"""Params:dets - a numpy array of detections in the format [[x1,y1,x2,y2,score],[x1,y1,x2,y2,score],...]Requires: this method must be called once for each frame even with empty detections (use np.empty((0, 5)) for frames without detections).Returns the a similar array, where the last column is the object ID.NOTE: The number of objects returned may differ from the number of detections provided."""self.frame_count += 1# get predicted locations from existing trackers.trks = np.zeros((len(self.trackers), 5)) # 存储筛选后的轨迹。第一帧shape=(0, 5);to_del = [] # 没有匹配的轨迹ret = [] # 存放检测所有合格的轨迹for t, trk in enumerate(trks):pos = self.trackers[t].predict()[0] # 根据上一帧的轨迹当前帧的轨迹.trk[:] = [pos[0], pos[1], pos[2], pos[3], 0]if np.any(np.isnan(pos)):to_del.append(t)trks = np.ma.compress_rows(np.ma.masked_invalid(trks)) # 剔除当前无效轨迹for t in reversed(to_del):self.trackers.pop(t) # 剔除上一帧中的无效轨迹matched, unmatched_dets, unmatched_trks = associate_detections_to_trackers(dets,trks, self.iou_threshold) # 第一帧没有轨迹,# update matched trackers with assigned detections 对匹配的轨迹更新for m in matched: # 根据当前轨迹和检测得到当前最优估计self.trackers[m[1]].update(dets[m[0], :])# create and initialise new trackers for unmatched detectionsfor i in unmatched_dets: # 对于没有被匹配上的检测框生成新的跟踪器,并添加到轨迹中trk = KalmanBoxTracker(dets[i,:])self.trackers.append(trk)i = len(self.trackers)for trk in reversed(self.trackers):d = trk.get_state()[0]if (trk.time_since_update < 1) and (trk.hit_streak >= self.min_hits or self.frame_count <= self.min_hits): #(当前更新的轨迹)and (连续匹配超过min_hits or 检测帧数小于min_hits)ret.append(np.concatenate((d,[trk.id+1])).reshape(1,-1)) # +1 as MOT benchmark requires positivei -= 1# remove dead trackletif(trk.time_since_update > self.max_age):self.trackers.pop(i)if(len(ret)>0):return np.concatenate(ret)return np.empty((0,5))def parse_args():"""Parse input arguments."""parser = argparse.ArgumentParser(description='SORT demo')parser.add_argument('--display', dest='display', help='Display online tracker output (slow) [False]',action='store_true')parser.add_argument("--seq_path", help="Path to detections.", type=str, default='data')parser.add_argument("--phase", help="Subdirectory in seq_path.", type=str, default='train')parser.add_argument("--max_age", help="Maximum number of frames to keep alive a track without associated detections.", type=int, default=1)parser.add_argument("--min_hits", help="Minimum number of associated detections before track is initialised.", type=int, default=3)parser.add_argument("--iou_threshold", help="Minimum IOU for match.", type=float, default=0.3)args = parser.parse_args()return argsif __name__ == '__main__':# all trainargs = parse_args()display = args.display # 是否显示结果phase = args.phase # 'trian'total_time = 0.0 # 总时长total_frames = 0 # 记录检测的帧数colours = np.random.rand(32, 3) # \used only for display [32,3]if(display):if not os.path.exists('mot_benchmark'):print('\n\tERROR: mot_benchmark link not found!\n\n Create a symbolic link to the MOT benchmark\n (https://motchallenge.net/data/2D_MOT_2015/#download). E.g.:\n\n $ ln -s /path/to/MOT2015_challenge/2DMOT2015 mot_benchmark\n\n')exit()plt.ion()fig = plt.figure()ax1 = fig.add_subplot(111, aspect='equal')if not os.path.exists('output'):os.makedirs('output')pattern = os.path.join(args.seq_path, phase, '*', 'det', 'det.txt') # 相对路径 'data/train/*/det/det.txt'# 1. 数据准备for seq_dets_fn in glob.glob(pattern):mot_tracker = Sort(max_age=args.max_age, # 1.1 初始化跟踪器min_hits=args.min_hits,iou_threshold=args.iou_threshold) # create instance of the SORT trackerseq_dets = np.loadtxt(seq_dets_fn, delimiter=',') # 1.2 加载数据seq = seq_dets_fn[pattern.find('*'):].split(os.path.sep)[0] # 'data/train/ETH-Bahnhof/det/det.txt' --> ['ETH-Bahnhof', 'det', 'det.txt'] --> 'ETH-Bahnhof'with open(os.path.join('output', '%s.txt'%(seq)),'w') as out_file: # 'output/ETH-Bahnhof.txt'print("Processing %s."%(seq))for frame in range(int(seq_dets[:,0].max())): # seq_dets[:,0]第一列为图片的序列号,遍历每一帧的检测结果frame += 1 # detection and frame numbers begin at 1dets = seq_dets[seq_dets[:, 0]==frame, 2:7] # x1,y1,w,h,cdets[:, 2:4] += dets[:, 0:2] # convert to [x1,y1,w,h] to [x1,y1,x2,y2]total_frames += 1if(display):fn = os.path.join('mot_benchmark', phase, seq, 'img1', '%06d.jpg'%(frame))im = io.imread(fn)ax1.imshow(im)plt.title(seq + ' Tracked Targets')start_time = time.time()trackers = mot_tracker.update(dets) # 2. 获取跟踪结果cycle_time = time.time() - start_timetotal_time += cycle_timefor d in trackers: # 画的是跟踪到的轨迹print('%d,%d,%.2f,%.2f,%.2f,%.2f,1,-1,-1,-1'%(frame,d[4],d[0],d[1],d[2]-d[0],d[3]-d[1]),file=out_file)if(display):d = d.astype(np.int32)ax1.add_patch(patches.Rectangle((d[0],d[1]),d[2]-d[0],d[3]-d[1],fill=False,lw=3,ec=colours[d[4]%32,:]))if(display):fig.canvas.flush_events()plt.draw()ax1.cla()print("Total Tracking took: %.3f seconds for %d frames or %.1f FPS" % (total_time, total_frames, total_frames / total_time))if(display):print("Note: to get real runtime results run without the option: --display")相关文章:
目标跟踪之sort算法(3)
这里写目录标题 1 流程1 预处理2 跟踪 2 代码 参考:sort代码 https://github.com/abewley/sort 1 流程 1 预处理 1.1 获取离线检测数据。1.2 实例化跟踪器。2 跟踪 2.1 轨迹处理。根据上一帧的轨迹预测当前帧的轨迹,剔除到当前轨迹中为空的轨迹得到当前…...

uniapp 地图添加,删除,编辑标记,在地图中根据屏幕范围中呈现标记
前言 小程序实现新功能,在地图中选取位置添加标记,并在地图中呈现添加的标记,(呈现的是根据当前屏幕范围内的标记),并对标记进行分享,删除,编辑,导航,并从分…...

第 5 章:声音与音乐系统
5.1 声音效果的应用 在游戏中,声音效果是增强游戏沉浸感和趣味性的重要元素。Pygame 提供了强大的音频处理功能,使得添加各种声音效果变得相对简单。声音效果可以包括角色的动作音效,如跳跃、攻击、受伤时的声音;环境音效&#x…...

SOME/IP服务接口
本系列文章将分享我在学习 SOME/IP 过程中积累的一些感悟,并结合 SOME/IP 的理论知识进行讲解。主要内容是对相关知识的梳理,并结合实际代码展示 SOME/IP 的使用,旨在自我复习并与大家交流。文中引用了一些例图,但由于未能找到原作…...

NeetCode刷题第17天(2025.1.27)
文章目录 086 Course Schedule II 课程安排二087 Graph Valid Tree 图有效树088 Number of Connected Components in an Undirected Graph 无向图中的连接组件数量 086 Course Schedule II 课程安排二 您将获得一个数组 prerequisites ,其中 prerequisites[i] [a,…...

c++学习第十四天
提示:以下是本篇文章正文内容,下面案例可供参考。 //力扣代码 class Solution {const char* numStrArr[10]{"","","abc","def","ghi","jkl","mno","pqrs","tuv&q…...

遗传算法【Genetic Algorithm(GA)】求解函数最大值(MATLAB and Python实现)
一、遗传算法基础知识 来自B站视频的笔记: 【超容易理解】手把手逐句带你解读并实现遗传算法的MATLAB编程(结合理论基础)_哔哩哔哩_bilibili 1、遗传算法 使用“适者生存”的原则,在遗传算法的每一代中,…...

MySQL 存储函数:数据库的自定义函数
在数据库开发中,存储函数(Stored Function)是一种非常有用的工具。它允许我们创建自定义的函数,这些函数可以在 SQL 查询中像内置函数一样使用,用于实现特定的逻辑和计算。本文将深入探讨 MySQL 存储函数的概念、与存储…...

【Rust自学】15.6. RefCell与内部可变性:“摆脱”安全性限制
题外话,这篇文章一共4050字,是截止到目前为止最长的文章,如果你能坚持读完并理解,那真的很强! 喜欢的话别忘了点赞、收藏加关注哦(加关注即可阅读全文),对接下来的教程有兴趣的可以…...

Luzmo 专为SaaS公司设计的嵌入式数据分析平台
Luzmo 是一款嵌入式数据分析平台,专为 SaaS 公司设计,旨在通过直观的可视化和快速开发流程简化数据驱动决策。以下是关于 Luzmo 的详细介绍: 1. 背景与定位 Luzmo 前身为 Cumul.io ,专注于为 SaaS 公司提供嵌入式分析解决方案。…...
方法:负索引的救赎与JavaScript标准化之路)
数组at()方法:负索引的救赎与JavaScript标准化之路
数组at()方法:负索引的救赎与JavaScript标准化之路 从一次代码评审说起 在某次团队代码评审中,小白注意到有同事写下了这样的代码: const lastItem arr[arr.length - 1];这让我回想起自己早期开发时被负索引问题困扰的经历。今天…...

HTML<label>标签
例子 三个带标签的单选按钮: <form action"/action_page.php"> <input type"radio" id"html" name"fav_language" value"HTML"> <label for"html">HTML</label><br&…...
)
约瑟夫问题(信息学奥赛一本通-2037)
【题目描述】 N个人围成一圈,从第一个人开始报数,数到M的人出圈;再由下一个人开始报数,数到M 的人出圈;…输出依次出圈的人的编号。 【输入】 输入N和M。 【输出】 输出一行,依次出圈的人的编号。 【输入样…...

二分查找题目:寻找两个正序数组的中位数
文章目录 题目标题和出处难度题目描述要求示例数据范围 解法一思路和算法代码复杂度分析 解法二思路和算法代码复杂度分析 题目 标题和出处 标题:寻找两个正序数组的中位数 出处:4. 寻找两个正序数组的中位数 难度 8 级 题目描述 要求 给定两个大…...

【技术洞察】2024科技绘卷:浪潮、突破、未来
涌动与突破 2024年,科技的浪潮汹涌澎湃,人工智能、量子计算、脑机接口等前沿技术如同璀璨星辰,方便了大家的日常生活,也照亮了人类未来的道路。这一年,科技的突破与创新不断刷新着人们对未来的想象。那么回顾2024年的科…...

【Linux】gdb——Linux调试器
gdb使用背景 程序的发布方式有两种,debug模式和release模式 Linux gcc/g出来的二进制程序,默认是release模式 要使用gdb调试,必须在源代码生成二进制程序的时候, 加上 -g 选项 gdb使用方法 首先进入gdb gdb test_glist显示代码 断点 b 行…...

fpga系列 HDL:XILINX Vivado Vitis 高层次综合(HLS) 实现 EBAZ板LED控制(上)
目录 创建工程创建源文件并编写C代码C仿真综合仿真导出RTL CG导出RTL错误处理: 创建工程 创建源文件并编写C代码 创建源文件(Souces下的hlsv.h和hlsv.cpp,Test Bench下的test_hlsv1.cpp): hlsv1.h #ifndef HLSV1 #define HLSV1 #include &l…...

卡特兰数学习
1,概念 卡特兰数(英语:Catalan number),又称卡塔兰数,明安图数。是组合数学中一种常出现于各种计数问题中的数列。它在不同的计数问题中频繁出现。 2,公式 卡特兰数的递推公式为:f(…...
)
度小满Java开发面试题及参考答案 (上)
String 是基本类型吗?String、StringBuffer、StringBuilder 的区别是什么?拼接字符串有哪些做法? String 不是基本类型,它是 Java 中的一个类,属于引用类型。 下面来看看 String、StringBuffer、StringBuilder 的区别: 类型可变性线程安全性性能适用场景String不可变线程…...

Python-基于PyQt5,json和playsound的通用闹钟
前言:刚刚结束2024年秋季学期的学习,接下来我们继续来学习PyQt5。由于之前我们已经学习了PyQt5以及PyUIC,Pyrcc和QtDesigner的安装,配置。所以接下来我们一起深入PyQt5,学习如何利用PyQt5进行实际开发-基于PyQt5,json和…...

关于数字地DGND和模拟地AGND隔离
文章目录 前言一、1、为什么要进行数字地和模拟地隔离二、隔离元件1.①0Ω电阻:2.②磁珠:3.电容:4.④电感: 三、隔离方法①单点接地②数字地与模拟地分开布线,最后再PCB板上一点接到电源。③电源隔离④、其他隔离方法 …...

小识Java死锁是否会造成CPU100%?
死锁或者大量的死锁不一定会直接导致CPU占用率达到100%。以下是详细分析: 一、死锁对CPU的影响 资源占用:死锁是指两个或多个线程(或进程)在相互等待对方释放资源,导致所有涉及的线程都无法继续执行。在死锁状态下&a…...

DeepSeek R1学习
0.回顾: https://blog.csdn.net/Together_CZ/article/details/144431432?ops_request_misc%257B%2522request%255Fid%2522%253A%25226574a586f0850d0329fbb720e5b8d5a9%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id…...

激光线扫相机无2D图像的标定方案
方案一:基于运动控制平台的标定 适用场景:若激光线扫相机安装在可控运动平台(如机械臂、平移台、旋转台)上,且平台的运动精度已知(例如通过编码器或高精度步进电机控制)。 步骤: 标…...

12 款开源OCR发 PDF 识别框架
2024 年 12 款开源文档解析框架的选型对比评测:PDF解析、OCR识别功能解读、应用场景分析及优缺点比较 这是该系列的第二篇文章,聚焦于智能文档处理(特别是 PDF 解析)。无论是在模型预训练的数据收集阶段,还是基于 RAG…...

【反悔堆】【hard】力扣871. 最低加油次数
汽车从起点出发驶向目的地,该目的地位于出发位置东面 target 英里处。 沿途有加油站,用数组 stations 表示。其中 stations[i] [positioni, fueli] 表示第 i 个加油站位于出发位置东面 positioni 英里处,并且有 fueli 升汽油。 假设汽车油…...

为什么应用程序是特定于操作系统的?[计算机原理]
你把WINDOWS程序复制到MAC上使用,会发现无法运行。你可能会说,MAC是arm处理器,而WINDWOS是X86 处理器。但是在2019年,那时候MAC电脑还全是Intel处理器,在同样的X86芯片上,运行MAC和WINDOWS 程序还是无法互相…...

多项日常使用测试,带你了解如何选择AI工具 Deepseek VS ChatGpt VS Claude
多项日常使用测试,带你了解如何选择AI工具 Deepseek VS ChatGpt VS Claude 注:因为考虑到绝大部分人的使用,我这里所用的模型均为免费模型。官方可访问的。ChatGPT这里用的是4o Ai对话,编程一直以来都是人们所讨论的话题。Ai的出现…...

什么是循环神经网络?
一、概念 循环神经网络(Recurrent Neural Network, RNN)是一类用于处理序列数据的神经网络。与传统的前馈神经网络不同,RNN具有循环连接,可以利用序列数据的时间依赖性。正因如此,RNN在自然语言处理、时间序列预测、语…...

Flink运行时架构
一、系统架构 1)作业管理器(JobManager) JobManager是一个Flink集群中任务管理和调度的核心,是控制应用执行的主进程。也就是说,每个应用都应该被唯一的JobManager所控制执行。 JobManger又包含3个不同的组件。 &am…...