【计算机视觉】目标跟踪应用
一、简介
目标跟踪是指根据目标物体在视频当前帧图像中的位置,估计其在下一帧图像中的位置。视频帧由t到t+1的检测,虽然也可以使用目标检测获取,但实际应用中往往是不可行的,原因如下:
目标跟踪的目的是根据目标在当前视频帧图像中的位置,预测其在下一帧图像中的位置。然而,使用目标检测直接获取目标位置的方式在实际应用中存在一些限制,主要原因如下:
1. 实时性问题
- 频繁检测开销大:目标检测通常需要对每一帧的整个图像进行搜索,找出目标的准确位置。这种操作对于实时视频处理来说非常消耗计算资源。即使使用高效的检测算法,如 YOLO、SSD 或 Faster R-CNN,频繁地对整个视频进行重建图像的目标检测会带来较大的计算开销,从而影响系统的实时性。
- 帧间延迟:目标检测需要对每帧进行检测,可能导致不同帧之间有一定的延迟。而跟踪算法通过利用目标位置的连续性来减少这种延迟,预测出目标在下一帧的位置。
2. 不稳定的检测结果
- 光照变化和遮挡:目标检测算法的性能可能受到光照、视角变化、遮挡等外部条件的影响。即便是在相对稳定的环境中,目标的姿态、大小和形状变化也可能导致检测结果不稳定。目标跟踪算法利用连续几帧的信息来稳定检测结果。
3. 误报和漏检问题
- 误报:目标检测算法可能出现误报现象,即在背景区域或类似的目标上检测出“假目标”,导致跟踪结果的不准确。
- 漏检:由于视角、遮挡等原因,目标可能在某帧被误识别或无法被检测到。目标跟踪算法通过连续帧的信息处理,减少漏检问题。
4. 目标识别间的联系性
- 目标特征的连续性:跟踪算法通过基于目标位置、形状、纹理等特征的连续变化来预测下一帧目标的位置信息。目标检测单独对每一帧进行分析,无法利用目标的连续特征来增强预测准确性。
5. 效率和复杂性
- 目标检测算法复杂度高:检测算法的复杂度通常远高于简单的图像处理操作。频繁地对每帧进行目标检测,可能导致整体算法运行效率较低。目标跟踪方法基于连续帧信息计算目标位置,避免了频繁重建搜索。
6. 噪声和错误输入
- 噪声处理:目标跟踪可以通过滤波算法(如卡尔曼滤波器、粒子滤波器等)处理连续帧之间的噪声和误差,而目标检测每次都从头开始搜索目标位置,容易受噪声影响。
7. 动态环境的挑战
- 环境变化:动态环境中目标可能因光照、遮挡、复杂背景等多种因素影响而在不同帧间存在较大变动。目标跟踪算法利用连续帧的时间序列信息,较好地处理这些变化,而目标检测只能基于每一帧的单次分析。
二、目标跟踪算法
目标跟踪算法的发展历史贯穿了计算机视觉领域的多个阶段,其演进紧密结合了图像处理技术、机器学习方法以及计算硬件性能的进步。以下是目标跟踪算法的发展主要阶段及重要方法:
1. 传统图像处理阶段(20世纪80-90年代)
这一时期目标跟踪主要依赖经典的图像处理技术,通常基于低级特征(如颜色、边缘、纹理等),主要代表方法包括:
关键方法:
- 均值漂移算法(Mean Shift, 2000):
- 通过目标的颜色直方图在下一帧中搜索最相似的区域。
- 优点:简单、高效,适合颜色差异显著的场景。
- 缺点:对尺度变化和复杂背景敏感。
- 光流法(Optical Flow, 1981):
- 基于运动估计的经典方法,利用像素强度变化检测目标的运动。
- 优点:适用于平滑运动。
- 缺点:对快速运动和遮挡敏感。
特点:
- 无需训练模型,主要基于数学模型和图像处理。
- 在简单场景中表现良好,但对遮挡、复杂背景和动态变化场景鲁棒性较差。
2. 统计学习阶段(2000年代)
随着机器学习和统计建模的发展,目标跟踪进入了学习阶段。此时,算法开始结合目标的多特征(如颜色、纹理、边界等)进行建模和优化。
关键方法:
-
粒子滤波器(Particle Filter, 1998-2000):
- 通过概率分布估计目标状态,用一组粒子表示目标位置和运动轨迹。
- 优点:对非线性和非高斯运动建模良好。
- 缺点:粒子数量多时计算成本高。
-
在线 Boosting(2008):
- 通过在线更新弱分类器来适应目标外观变化。
- 优点:适合实时跟踪和目标外观变化。
- 缺点:容易受背景噪声影响。
特点:
- 引入机器学习方法,算法对目标特征的学习能力增强。
- 更注重目标外观变化的适应性。
3. 基于相关滤波的阶段(2010年代初)
相关滤波器(Correlation Filter)通过快速傅里叶变换(FFT)提升了目标跟踪的计算效率,在实时性和准确性上取得了重要进展。
关键方法:
-
MOSSE(Minimum Output Sum of Squared Error, 2010):
- 基于相关滤波器的高效跟踪算法。
- 优点:计算速度快,适用于实时跟踪。
- 缺点:对目标尺度变化不敏感。
-
CSRT(Discriminative Correlation Filter with Channel and Spatial Reliability, 2017):
- 改进的相关滤波算法,引入了多通道特征。
- 优点:对尺度变化和部分遮挡更鲁棒。
-
KCF(Kernelized Correlation Filters, 2015):
- 利用核方法提升了相关滤波的分类能力。
- 优点:高效且精度较高,适合实时应用。
特点:
- 高效,适合实时跟踪任务。
- 对尺度变化和外观变化的适应性有所提升。
4. 深度学习阶段(2010年代中后期至今)
深度学习的兴起显著提高了目标跟踪的性能。此时的跟踪算法开始依赖深度卷积神经网络(CNN)和循环神经网络(RNN)来提取高层特征,解决了许多传统方法无法应对的问题。
关键方法:
-
Siamese 网络(SiamFC, 2016):
- 基于孪生网络架构,通过相似性学习实现目标跟踪。
- 优点:高效且无需在线更新。
-
MDNet(Multi-Domain Network, 2016):
- 使用深度神经网络进行目标跟踪,支持多域训练。
- 优点:适应目标外观变化。
- 缺点:计算效率较低。
-
ATOM(Accurate Tracking by Overlap Maximization, 2019):
- 引入 IOU 预测模块,进一步提高跟踪精度。
- 优点:对复杂场景和外观变化表现良好。
-
SiamRPN(Region Proposal Network, 2018):
- 将区域建议网络(RPN)与孪生网络结合,实现端到端的跟踪。
- 优点:兼顾效率与精度。
特点:
- 深度学习模型能提取更丰富的目标特征,具有更强的泛化能力。
- 更能应对目标外观变化、复杂背景和遮挡问题。
5. 多目标跟踪与混合方法(2020年代)
近年来,单目标跟踪(SOT)与多目标跟踪(MOT)技术逐步融合,跟踪算法开始关注多个目标之间的关联性。同时,深度学习与经典方法的结合也成为趋势。
关键发展方向:
-
多目标跟踪(MOT):
- 结合检测与跟踪,通过目标检测算法提供候选框(如 YOLO、Faster R-CNN),并利用跟踪算法(如 SORT、DeepSORT)完成轨迹匹配。
-
Transformer 模型:
- 最近的跟踪模型(如 TrackFormer、TransT)引入 Transformer 框架,进一步提升了复杂场景中的跟踪性能。
-
端到端跟踪:
- 研究端到端的模型(如 STARK),通过统一框架完成检测和跟踪任务。
三、实例
以下是一个基于 Python 的车辆检测与跟踪算法,使用 YOLOv8 进行目标检测,结合 DeepSORT 进行目标跟踪,并使用 OpenCV 处理视频流。
1.代码实现
import cv2
from ultralytics import YOLO
from deep_sort_realtime.deepsort_tracker import DeepSort# 初始化 YOLOv8 模型
yolo_model = YOLO("yolov8n.pt") # 使用 YOLOv8 预训练模型(选择适合的权重,如 yolov8n.pt)# 初始化 DeepSORT 跟踪器
tracker = DeepSort(max_age=30, # 最大未检测目标的生存帧数nn_budget=100, # 最近邻的最大存储数nms_max_overlap=1.0 # 重叠阈值
)# 打开视频文件或摄像头
video_path = "cars_video.mp4" # 替换为你的视频文件路径,或者使用 0 打开摄像头
cap = cv2.VideoCapture(video_path)if not cap.isOpened():print("无法打开视频文件")exit()# 定义车辆类别的索引(根据 COCO 数据集类别)
VEHICLE_CLASSES = [2, 3, 5, 7] # 汽车、摩托车、巴士、卡车# 开始处理视频帧
while True:ret, frame = cap.read()if not ret:print("视频处理结束")break# YOLOv8 目标检测results = yolo_model.predict(frame, conf=0.5) # 设置置信度阈值detections = results[0] # 提取 YOLO 结果# 筛选车辆目标det_boxes = []for det in detections.boxes:class_id = int(det.cls.cpu().numpy()[0])if class_id in VEHICLE_CLASSES:x1, y1, x2, y2 = map(int, det.xyxy[0].cpu().numpy()) # 提取边界框坐标conf = float(det.conf.cpu().numpy()[0]) # 提取置信度det_boxes.append([x1, y1, x2, y2, conf]) # 添加到检测列表# DeepSORT 跟踪tracked_objects = tracker.update_tracks(det_boxes, frame=frame) # 更新跟踪器# 在帧上绘制跟踪结果for track in tracked_objects:if not track.is_confirmed() or track.time_since_update > 1:continuetrack_id = track.track_id # 获取唯一 IDbbox = track.to_ltwh() # 获取边界框x, y, w, h = map(int, bbox)# 绘制边界框和跟踪 IDcv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)cv2.putText(frame,f"ID {track_id}",(x, y - 10),cv2.FONT_HERSHEY_SIMPLEX,0.5,(0, 255, 0),2,)# 显示当前帧cv2.imshow("Vehicle Detection and Tracking", frame)# 按 'q' 键退出if cv2.waitKey(1) & 0xFF == ord('q'):break# 释放资源
cap.release()
cv2.destroyAllWindows()
2.代码说明
- YOLOv8 检测部分:
- 使用
ultralytics提供的 YOLOv8 模型加载车辆检测模型(yolov8n.pt)。 - 通过类别索引筛选车辆相关的目标(如汽车、摩托车、巴士、卡车)。
- 使用
- DeepSORT 跟踪部分:
- 初始化 DeepSORT 跟踪器,通过传递检测边界框和置信度列表进行跟踪更新。
- 每个跟踪目标都会被分配唯一的 Track ID。
- 实时视频处理:
- 使用 OpenCV 读取视频流或摄像头帧,逐帧检测并跟踪目标。
- 在视频中绘制检测框和跟踪 ID,以实现视觉化效果。
- 目标类别过滤:
- 根据 COCO 数据集的类别索引,仅保留车辆类别目标进行处理。
3.输出效果
- 在视频帧中绘制每辆车的边界框,并标注唯一的 Track ID。
- 支持实时视频流处理。
相关文章:

【计算机视觉】目标跟踪应用
一、简介 目标跟踪是指根据目标物体在视频当前帧图像中的位置,估计其在下一帧图像中的位置。视频帧由t到t1的检测,虽然也可以使用目标检测获取,但实际应用中往往是不可行的,原因如下: 目标跟踪的目的是根据目标在当前…...

android 音视频系列引导
音视频这块的知识点自己工作中有用到,一直没有好好做一个总结,原因有客观和主观的。 客观是工作太忙,没有成段时间做总结。 主观自己懒。 趁着这次主动离职拿了n1的钱,休息一下,对自己的人生做一下总结,…...

数据结构的队列
一.队列 1.队列(Queue)的概念就是先进先出。 2.队列的用法,红色框和绿色框为两组,offer为插入元素,poll为删除元素,peek为查看元素红色的也是一样的。 3.LinkedList实现了Deque的接口,Deque又…...

HTML-新浪新闻-实现标题-排版
标题排版 图片标签:<img> src:指定图片的url(绝对路径/相对路径) width:图片的宽度(像素/相对于父元素的百分比) heigth:图片的高度(像素/相对于父元素的百分比&a…...

C# 环境:深入探讨与优化
C# 环境:深入探讨与优化 引言 C#(读作“C sharp”)是一种由微软开发的高级编程语言,主要用于创建Windows桌面和服务器应用程序。自2002年首次发布以来,C#已经成为了开发领域中最受欢迎的语言之一。本文将深入探讨C#的环境配置、开发工具、最佳实践以及性能优化等方面,以…...

C语言二级题解:查找字母以及其他字符个数、数字字符串转双精度值、二维数组上下三角区域数据对调
目录 一、程序填空题 --- 查找字母以及其他字符个数 题目 分析 二、程序修改 --- 数字字符串转双精度值 题目 分析 小数位字符串转数字 三、程序设计 --- 二维数组上下三角区域数据对调 题目 分析 前言 本文来讲解: 查找字母以及其他字符个数、数字字符串…...

VPR概述、资源
SOTA网站: Visual Place Recognition | Papers With Code VPR(Visual Place Recognition) 是计算机视觉领域的一项关键任务,旨在通过图像匹配和分析来识别场景或位置。它的目标是根据视觉信息判断某个场景是否与数据库中的场景匹…...
Electron学习笔记,安装环境(1)
1、支持win7的Electron 的版本是18,这里node.js用的是14版本(node-v14.21.3-x86.msi)云盘有安装包 Electron 18.x (截至2023年仍在维护中): Chromium: 96 Node.js: 14.17.0 2、安装node环境,node-v14.21.3-x86.msi双击运行选择安…...

58.界面参数传递给Command C#例子 WPF例子
界面参数的传递,界面参数是如何从前台传送到后台的。 param 参数是从界面传递到命令的。这个过程通常涉及以下几个步骤: 数据绑定:界面元素(如按钮)的 Command 属性绑定到视图模型中的 RelayCommand 实例。同时&#x…...

Git图形化工具【lazygit】
简要介绍一下偶然发现的Git图形化工具——「lazygit」 概述 Lazygit 是一个用 Go 语言编写的 Git 命令行界面(TUI)工具,它让 Git 操作变得更加直观和高效。 Github地址:https://github.com/jesseduffield/lazygit 主要特点 主要…...

前端表单验证终极指南:HTML5 内置验证 + JavaScript 自定义校验
系列文章目录 01-从零开始学 HTML:构建网页的基本框架与技巧 02-HTML常见文本标签解析:从基础到进阶的全面指南 03-HTML从入门到精通:链接与图像标签全解析 04-HTML 列表标签全解析:无序与有序列表的深度应用 05-HTML表格标签全面…...

AI大模型开发原理篇-3:词向量和词嵌入
简介 词向量是用于表示单词意义的向量, 并且还可以被认为是单词的特征向量或表示。 将单词映射到实向量的技术称为词嵌入。在实际应用中,词向量和词嵌入这两个重要的NLP术语通常可以互换使用。它们都表示将词汇表中的单词映射到固定大小的连续向量空间中…...

三个不推荐使用的线程池
线程池的种类 其实看似这么多的线程池,都离不开ThreadPoolExecutor去创建,只不过他们是简化一些参数 newFixedThreadPool 里面全是核心线程 有资源耗尽的风险,任务队列最大长度为Integer.MAX_VALUE,可能会堆积大量的请求ÿ…...

星际战争模拟系统:新月的编程之道
星际战争模拟系统:新月的编程之道 作为一名在 25 世纪星际时代成长起来的科学家和军事战略家,我对编程和人工智能的热爱始于童年。我的父亲是一位著名的物理学家,母亲是一位杰出的生物工程师。在他们的影响下,我从小就对科学和技术…...

【CS61A 2024秋】Python入门课,全过程记录P4(Week7 Generators开始,更新于2025/1/29)
文章目录 关于基本介绍👋新的问题更好的解决方案Week7Mon Generators阅读材料Lab 05: Iterators, MutabilityQ1: WWPD: List-MutationQ2: Insert Items 关于 个人博客,里面偶尔更新,最近比较忙。发一些总结的帖子和思考。 江湖有缘相见&…...

Fort Firewall:全方位守护网络安全
Fort Firewall是一款专为 Windows 操作系统设计的开源防火墙工具,旨在为用户提供全面的网络安全保护。它基于 Windows 过滤平台(WFP),能够与系统无缝集成,确保高效的网络流量管理和安全防护。该软件支持实时监控网络流…...
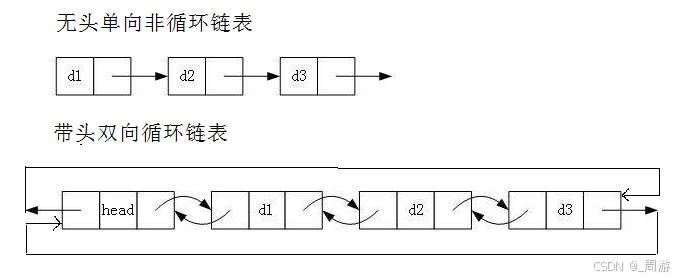
【数据结构】_C语言实现不带头非循环单向链表
目录 1. 链表的概念及结构 2. 链表的分类 3. 单链表的实现 3.1 SList.h头文件 3.2 SList.c源文件 3.3 Test_SList.c测试文件 关于线性表,已介绍顺序表,详见下文: 【数据结构】_顺序表-CSDN博客 本文介绍链表; 基于顺序表…...

【Qt】06-对话框
对话框 前言一、模态和非模态对话框1.1 概念1.2 模态对话框1.2.1 代码QAction类 1.2.2 模态对话框运行分析 1.3 非模态对话框1.3.1 代码局部变量和成员变量setAttribute 类 1.3.2 现象解释 二、标准对话框2.1 提示对话框 QMessageBox2.1.1 现象及解释 2.2 问题对话框2.2.1 现象…...

特征缩放:数据归一化
First,新年到了!感谢CSDN一路相伴,成为技术交流的温馨港湾。值此蛇年新春,祝平台人气蒸蒸日上,活动精彩纷呈,助力更多开发者突破技术瓶颈,在新的一年创造无限可能,新年快乐ÿ…...

Kubernetes 环境中的自动化运维实战指南
Kubernetes 作为容器编排领域的领导者,已经成为云原生应用的核心基础设施。然而,随着集群规模的扩大和应用的复杂化,手动运维 Kubernetes 集群变得愈发困难。自动化运维成为提升效率、保障系统稳定性的关键。本文将详细介绍如何在 Kubernetes 环境中实施自动化运维,涵盖工具…...

深入探讨Web应用开发:从前端到后端的全栈实践
在数字化时代,Web应用已成为连接用户与服务的关键桥梁。无论是电商平台、社交媒体,还是企业内部管理系统,Web应用都扮演着不可或缺的角色。本文将深入探讨Web应用开发的全栈实践,从前端的用户体验设计到后端的数据处理与存储&…...

分享|通过Self-Instruct框架将语言模型与自生成指令对齐
结论 在大型 “指令调整” 语言模型依赖的人类编写指令数据存在数量、多样性和创造性局限, 从而阻碍模型通用性的背景下, Self - Instruct 框架, 通过 自动生成 并 筛选指令数据 微调预训练语言模型, 有效提升了其指令遵循能…...

扣子平台音频功能:让声音也能“智能”起来。扣子免费系列教程(14)
在数字化时代,音频内容的重要性不言而喻。无论是在线课程、有声读物,还是各种多媒体应用,音频都是传递信息、增强体验的关键元素。扣子平台的音频功能,为开发者和内容创作者提供了一个强大而灵活的工具,让音频的使用和…...

超分辨率体积重建实现术前前列腺MRI和大病理切片组织病理学图像的3D配准
摘要: 磁共振成像(MRI)在前列腺癌诊断和治疗中的应用正在迅速增加。然而,在MRI上识别癌症的存在和范围仍然具有挑战性,导致即使是专家放射科医生在检测结果上也存在高度变异性。提高MRI上的癌症检测能力对于减少这种变异性并最大化MRI的临床效用至关重要。迄今为止,这种改…...

C++并发编程指南03
文章目录 传递参数2.2.1 基本参数传递示例: 2.2.2 注意动态变量指针的传递错误示例:正确示例: 2.2.3 引用参数的传递错误示例:正确示例: 2.2.4 成员函数和对象指针的传递示例:带参数的成员函数示例…...

大数据Hadoop入门3
目录 第五部分(Apache Hive DML语句和函数使用) 1.课程内容大纲和学习目标 2.Hive SQL-DML-load加载数据操作 3.Hive SQL-DML-insert插入数据 4.Hive SQL-DML-select查询-语法书和环境准备 5.Hive SQL-DML-select查询-列表达式和distinct去重 6.Hi…...

Autosar-Os是怎么运行的?(多核系统运行)
写在前面: 入行一段时间了,基于个人理解整理一些东西,如有错误,欢迎各位大佬评论区指正!!! 目录 1.Autosar多核操作系统 1.1多核启动过程 1.2多核运行过程 1.2.1核间任务同步 1.2.2Counte…...

【硬件介绍】三极管工作原理(图文+典型电路设计)
什么是三极管? 三极管,全称为双极型晶体三极管,是一种广泛应用于电子电路中的半导体器件。它是由三个掺杂不同的半导体材料区域组成的,这三个区域分别是发射极(E)、基极(B)和集电极&…...
)
MATLAB基础应用精讲-【数模应用】DBSCAN算法(附MATLAB和python代码实现)
目录 前言 几个高频面试题目 DBSCAN和传统聚类算法对比 算法原理 发展历程 主要事件 发展分析 什么是DBSCAN DBSCAN算法的聚类过程 DBSCAN算法的样本点组成 几个相关的概念: 算法思想 DBSCAN算法优缺点和改进 2.1 DBSCAN算法优缺点 2.2 DBSCAN算法改进 算法流…...
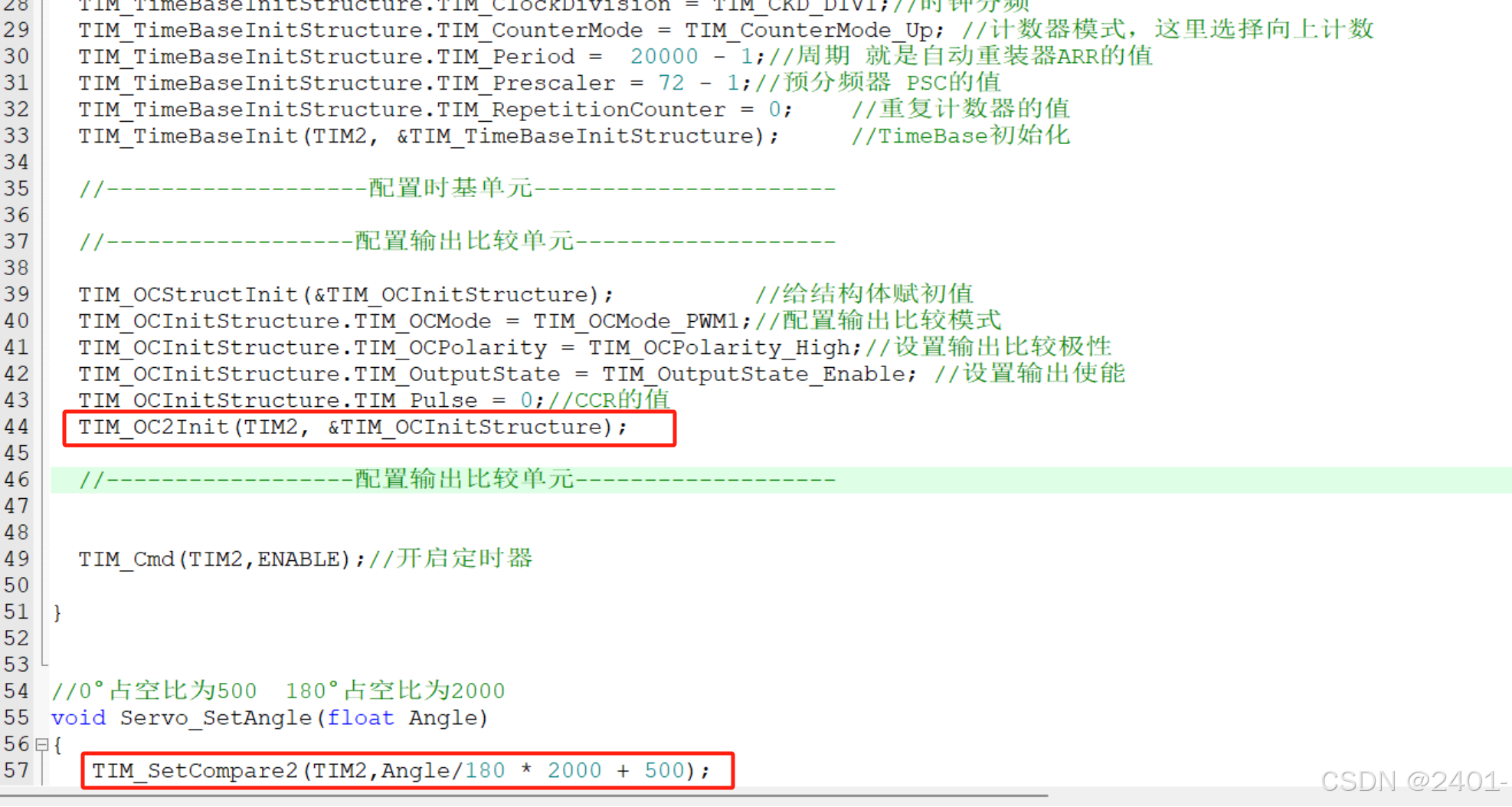
STM32 PWM驱动舵机
接线图: 这里将信号线连接到了开发板的PA1上 代码配置: 这里的PWM配置与呼吸灯一样,呼吸灯连接的是PA0引脚,输出比较单元用的是OC1通道,这里只需改为OC2通道即可。 完整代码: #include "servo.h&quo…...