UE5制作视差图
双目深度估计开源数据集很多都是用UE制作的,那么我们自己能否通过UE制作自己想要的场景的数据集呢。最近花了点时间研究了一下,分享给需要的小伙伴。
主要使用的是UnrealCV插件,UnrealCV是一个开源项目,旨在帮助计算机视觉研究人员使用虚幻引擎(UE)构建虚拟世界。
下载UnrealCV
GitHub - unrealcv/unrealcv: UnrealCV: Connecting Computer Vision to Unreal Engine
下载并安装对应版本的UE5,参考这个链接:
https://blog.csdn.net/ButDanJi/article/details/133919089
注意UnrealCV的版本和UE5的版本必须一致,例如UnrealCV5.2 必须对应UE5.2,否则可能会报错
进入UE,新建项目,例如这里可以创建一个第一人称游戏的项目:

项目创建完成后,关闭UE。在对应项目下新建Plugins文件夹,并把unrealcv放在项目的Plugins下,例如:E:\UE_Project\testproject5\Plugins\unrealcv-5.2
打开UE下的unrealcv.ini文件,E:\UnrealEngine-5.2.0-release\Engine\Binaries\Win64\unrealcv.ini
将EnableRightEye设置为True
再次打开UE,打开这个项目,此时会提示安装UnrealCV

点击yes安装UnrealCV,等待一段时间后会进入项目,点击编辑-插件,搜索UnrealCV,如果安装成功能搜到UnrealCV且处于启动状态

点击窗口-加载布局-UE4经典布局
在放置Actor下搜索fusion camera actor,放置2个相机到场景中

点击play 运行关卡

按下`输入vget /unrealcv/status

会得到以下日志:
LogUnrealCV: Warning: vget helper function, the real command is vget /unrealcv/status
LogUnrealCV: Warning: Is Listening
No Client Connected
9001
Configuration
Config file: E:/UnrealEngine-5.2.0-release/Engine/Binaries/Win64/unrealcv.ini
Port: 9001
Width: 640
Height: 480
FOV: 90.000000
EnableInput: true
EnableRightEye: true此时UnrealCV已准备完毕,UnrealCV服务器正处于监听状态,接下来我们通过python构建客户端连接到UnrealCV进行采图
下载
https://github.com/ibaiGorordo/UnrealCV-stereo-depth-generation
注意直接运行会报错,UnrealCV的用法有改变,不能直接使用client.connect()
需要在代码开头加上
ip = '127.0.0.1'
port = 9001
client = Client((ip, port))
至于原因可以参考我在UnrealCV下问的帖子:
Can not connect to localhost · Issue #258 · unrealcv/unrealcv
这个项目可以获得平面深度,但不是视差图,我用以下代码获得视差图:
def convert_plane_depth_to_disp(plane_depth, f=320.0, baseline_meters=1.0):disp = f * baseline_meters * (1.0 / plane_depth)return disp这个代码是参考自以下链接:https://github.com/wuwushrek/AirSim/blob/56e2c5c3ec461f2d95c6a9e80c98767078e718ac/PythonClient/generate_stereo_data.py#L67
于是最后的代码为(这里是示例,相机的姿态等参数需要自己修改):
from unrealcv import Client
import sys
import numpy as np
import cv2
import io
ip = '127.0.0.1'
port = 9001
client = Client((ip, port))camera_poses=np.array([[-106.933, 459.372, 167.895, 0.213, -80.610, 0.000],
[-97.576, 413.807, 168.308, 2.901, -79.483, 0.000],
[-88.197, 346.847, 166.356, 3.644, -89.711, 0.000],
[-82.595, 278.711, 172.572, 5.711, -85.554, 0.000],
[-73.239, 149.936, 176.386, 0.058, -89.777, 0.000],
[-71.879, 58.805, 175.112, 1.199, -89.030, 0.000],
[-69.923, 10.021, 161.958, 4.062, -59.268, 0.000],
[-28.289, -68.530, 159.251, 2.186, -61.090, 0.000],
[-28.289, -68.530, 159.251, 2.831, -43.937, 0.000],
[-28.289, -68.530, 159.251, 1.782, 0.917, 0.000],
[-28.289, -68.530, 159.251, 3.708, 33.667, 0.000],
[-28.289, -68.530, 159.251, 0.167, 92.277, 0.000],
[-32.458, 5.207, 157.922, 2.922, 93.428, 0.000],
[-35.463, 90.040, 156.689, 1.045, 97.168, 0.000],
[-46.087, 180.173, 155.370, 1.167, 96.643, 0.000],
[-52.370, 234.121, 154.580, 1.167, 96.315, 0.000],
[-52.370, 234.121, 154.580, 3.425, 54.474, 0.000],
[-52.370, 234.121, 154.580, 5.985, 18.172, 0.000],
[-52.370, 234.121, 154.580, 5.675, -10.430, 0.000],
[-52.370, 234.121, 154.580, 11.879, -34.452, 0.000],
[-52.370, 234.121, 154.580, 13.122, -66.362, 0.000],
[-52.370, 234.121, 154.580, 14.454, -81.988, 0.000]])fps = 45
times = np.arange(0,camera_poses.shape[0]*fps,fps)
filled_times = np.arange(0,camera_poses.shape[0]*fps)filtered_poses = np.array([np.interp(filled_times, times, axis) for axis in camera_poses.T]).Tclass UnrealcvStereo():def __init__(self):client.connect() if not client.isconnected():print('UnrealCV server is not running. Run the game downloaded from http://unrealcv.github.io first.')sys.exit(-1)def __str__(self):return client.request('vget /unrealcv/status')@staticmethoddef set_position(pose):# Set position of the first cameraclient.request(f'vset /camera/1/location {pose[0]} {pose[1]} {pose[2]}')client.request(f'vset /camera/1/rotation {pose[3]} {pose[4]} {pose[5]}')client.request(f'vset /camera/2/location {pose[0]} {pose[1]} {pose[2]}')client.request(f'vset /camera/2/rotation {pose[3]} {pose[4]} {pose[5]}')@staticmethoddef get_stereo_pair(eye_distance):res = client.request('vset /action/eyes_distance %d' % eye_distance)res = client.request('vget /camera/1/lit png')left = cv2.imdecode(np.frombuffer(res, dtype='uint8'), cv2.IMREAD_UNCHANGED)res = client.request('vget /camera/2/lit png')right = cv2.imdecode(np.frombuffer(res, dtype='uint8'), cv2.IMREAD_UNCHANGED)return left, right@staticmethoddef convert_depth(PointDepth, f=320):H = PointDepth.shape[0]W = PointDepth.shape[1]i_c = float(H) / 2 - 1j_c = float(W) / 2 - 1columns, rows = np.meshgrid(np.linspace(0, W-1, num=W), np.linspace(0, H-1, num=H))DistanceFromCenter = ((rows - i_c)**2 + (columns - j_c)**2)**(0.5)PlaneDepth = PointDepth / (1 + (DistanceFromCenter / f)**2)**(0.5)return PlaneDepth@staticmethoddef get_depth():res = client.request('vget /camera/1/depth npy')point_depth = np.load(io.BytesIO(res))return UnrealcvStereo.convert_depth(point_depth)@staticmethoddef color_depth(depth_map, max_dist):norm_depth_map = 255*(1-depth_map/max_dist)norm_depth_map[norm_depth_map < 0] =0norm_depth_map[depth_map == 0] =0return cv2.applyColorMap(cv2.convertScaleAbs(norm_depth_map,1), cv2.COLORMAP_MAGMA)def convert_plane_depth_to_disp(plane_depth, f=320.0, baseline_meters=1.0):disp = f * baseline_meters * (1.0 / plane_depth)return disp
if __name__ == '__main__':eye_distance = 10max_depth = 5stereo_generator = UnrealcvStereo()for pose in filtered_poses:stereo_generator.set_position(pose)# Set the eye distanceleft, right = stereo_generator.get_stereo_pair(eye_distance)depth_map = stereo_generator.get_depth()baseline_cm =25# Parameters for cameracx = float(depth_map.shape[1]) / 2.0 - 1.0cy = float(depth_map.shape[0]) / 2.0 - 1.0f = cxdisparity = convert_plane_depth_to_disp(plane_depth=depth_map, f=f, baseline_meters=baseline_cm/100.0)color_depth_map = stereo_generator.color_depth(disparity, max_depth)left = cv2.cvtColor(left, cv2.COLOR_BGRA2BGR)right = cv2.cvtColor(right, cv2.COLOR_BGRA2BGR)output_path = "C:/Users/chen/Desktop/output_image.jpg"output_path1 = "C:/Users/chen/Desktop/output_image1.jpg"output_path2 = "C:/Users/chen/Desktop/output_image2.jpg"cv2.imwrite(output_path, color_depth_map) cv2.imwrite(output_path1, left)cv2.imwrite(output_path2, right)combined_image = np.hstack((left, right, color_depth_map))cv2.imshow("stereo", combined_image)# Press key q to stopif cv2.waitKey(1) == ord('q'):breakcv2.destroyAllWindows()运行python文件(运行时,UE的项目必须处于运行状态,即play状态)
这时就能获得双目图像和视差图了。
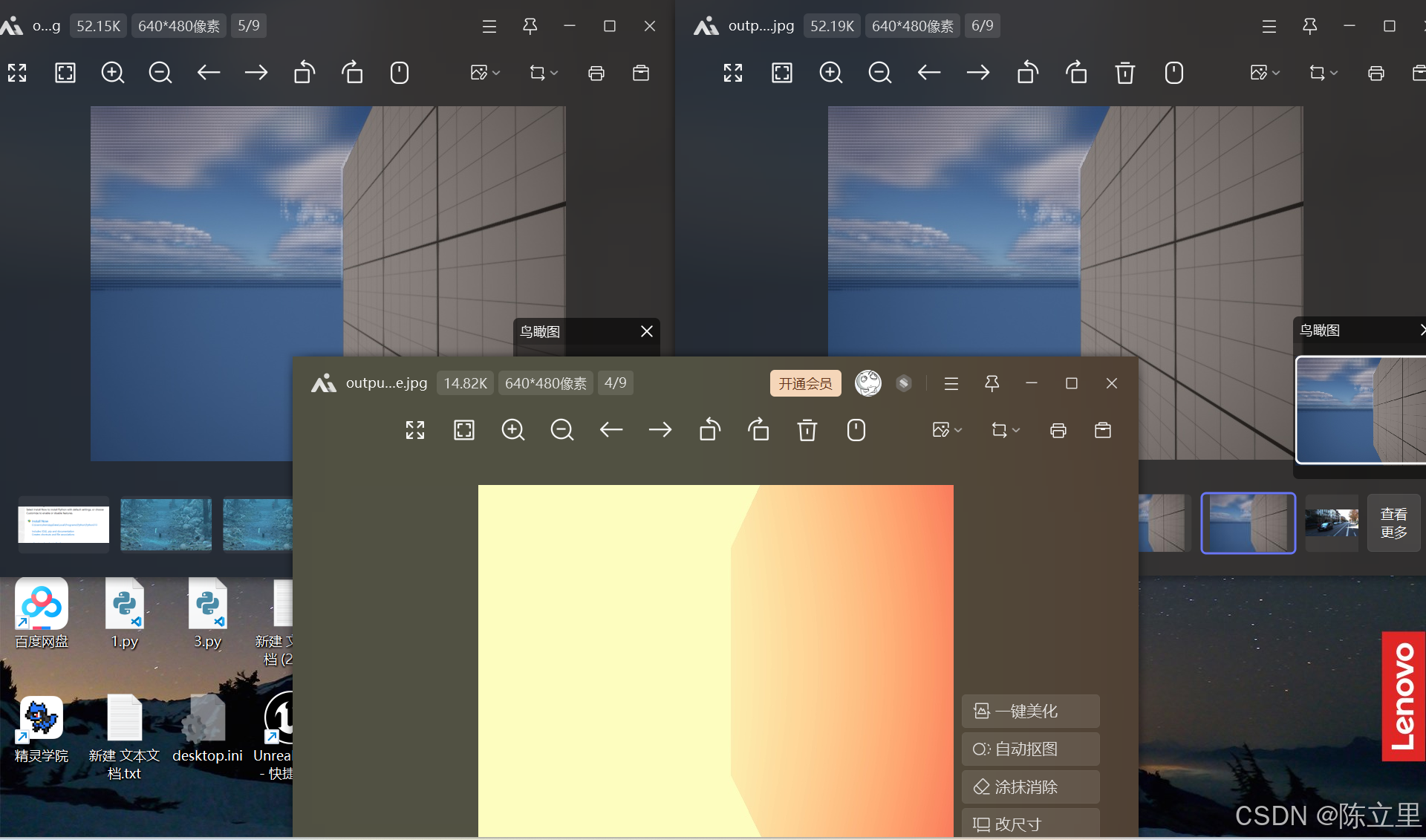
再往后就是换成自己想要的场景并修改两个相机的姿态以及baseline_meters等参数,修改完就可以得到想要的图像了
相关文章:
UE5制作视差图
双目深度估计开源数据集很多都是用UE制作的,那么我们自己能否通过UE制作自己想要的场景的数据集呢。最近花了点时间研究了一下,分享给需要的小伙伴。 主要使用的是UnrealCV插件,UnrealCV是一个开源项目,旨在帮助计算机视觉研究人…...

根据每月流量和市场份额排名前20 的AI工具列表
ChatGPT:由Open AI研发,是一款对话式大型语言模型。它能够理解自然语言输入,生成连贯且符合逻辑的回复。可用于文本创作,如撰写文章、故事、诗歌;还能解答各种领域的知识问题,提供翻译、代码解释等服务&…...
)
前端学习-事件委托(三十)
目录 前言 课前思考 for循环注册事件 语法 事件委托 1.事件委托的好处是什么? 2.事件委托是委托给了谁,父元素还是子元素 3.如何找到真正触发的元素 示例代码 总结 前言 才子佳人,自是白衣卿相 课前思考 1.如果同时给多个元素注册事件&…...

记忆化搜索(5题)
是什么? 是一个带备忘录的递归 如何实现记忆化搜索 1.添加一个备忘录(建立一个可变参数和返回值的映射关系) 2.递归每次返回的时候把结果放到备忘录里 3.在每次进入递归的时候往备忘录里面看看。 目录 1.斐波那契数列 2.不同路径 3.最…...

【游戏设计原理】96 - 成就感
成就感是玩家体验的核心,它来自完成一件让自己满意的任务,而这种任务通常需要一定的努力和挑战。游戏设计师的目标是通过合理设计任务,不断为玩家提供成就感,保持他们的参与热情。 ARCS行为模式(注意力、关联性、自信…...
和引用数据类型)
Java小白入门教程:内置数据类型(四类八种)和引用数据类型
目录 一、内置数据类型(四类八种) 1. 整数类型(四种子类型) 2. 浮点类型(两种子类型) 3. 字符类型(一种子类型) 4. 布尔类型(一种子类型) 二、引用数据类…...

【设计测试用例自动化测试性能测试 实战篇】
🌈个人主页:努力学编程’ ⛅个人推荐: c语言从初阶到进阶 JavaEE详解 数据结构 ⚡学好数据结构,刷题刻不容缓:点击一起刷题 🌙心灵鸡汤:总有人要赢,为什么不能是我呢 设计测试用例…...

20-30 五子棋游戏
20-分析五子棋的实现思路_哔哩哔哩_bilibili20-分析五子棋的实现思路是一次性学会 Canvas 动画绘图(核心精讲50个案例)2023最新教程的第21集视频,该合集共计53集,视频收藏或关注UP主,及时了解更多相关视频内容。https:…...

抽象类与抽象方法详解
目录 一、 基本概念 1.抽象类(Abstract Class): 2.抽象方法(Abstract Method): 二、示例代码 抽象类 抽象方法 三、抽象类的使用场景 四、 抽象类与接口的对比 五、注意事项 六、总结 一、 基本概…...

受击反馈HitReact、死亡效果Death Dissolve、Floating伤害值Text(末尾附 客户端RPC )
受击反馈HitReact 设置角色受击标签 (GameplayTag基本了解待补充) 角色监听标签并设置移动速度 创建一个受击技能,并应用GE 实现设置角色的受击蒙太奇动画 实现角色受击时播放蒙太奇动画,为了保证通用性,将其设置为一个函数,并…...

应用程序中处理文件上传的方法
在应用程序中处理文件上传通常涉及以下几个步骤: 一、前端准备 前端负责收集文件,并通过 HTTP 请求将其发送到服务器。常见的方法包括: ①HTML <form>; 表单:使用 enctype="multipart/form-data" 属性指定表单支持文件上传。 ②JavaScript (AJAX):可以使…...

Java进阶six junit单元测试,反射,注解,动态代理
前言 Java进阶课程的第六篇,也是最后一篇,junit单元测试,反射,注解,动态代理相关内容 包含知识点 junit单元测试 反射 1.内部类Student: 包含私有/公共字段和方法 包含默认构造器和私有构造器 2.获取Class对象的三种方式: .…...

STM32 LED呼吸灯
接线图: 这里将正极接到PA0引脚上,负极接到GND,这样就高电平点亮LED,低电平熄灭。 占空比越大,LED越亮,占空比越小,LED越暗 PWM初始化配置 输出比较函数介绍: 用这四个函数配置输…...

栈和队列特别篇:栈和队列的经典算法问题
图均为手绘,代码基于vs2022实现 系列文章目录 数据结构初探: 顺序表 数据结构初探:链表之单链表篇 数据结构初探:链表之双向链表篇 链表特别篇:链表经典算法问题 数据结构:栈篇 数据结构:队列篇 文章目录 系列文章目录前言一.有效的括号(leetcode 20)二.用队列实现栈(leetcode…...

用一个例子详细说明python单例模式
单例模式是一种设计模式,它确保一个类只有一个实例,并提供一个全局访问点来访问该实例。这在需要控制资源(如数据库连接、文件系统等)的访问时非常有用。 下面是一个使用Python实现单例模式的例子: class Singleton:…...

Kotlin 委托详解
Kotlin 委托详解 引言 Kotlin 作为一种现代化的编程语言,在 Android 开发等领域得到了广泛的应用。在 Kotlin 中,委托(Delegation)是一种强大的特性,它可以让我们以更简洁的方式实现代码的复用和扩展。本文将详细解析…...

什么是词嵌入?Word2Vec、GloVe 与 FastText 的区别
自然语言处理(NLP)领域的核心问题之一,是如何将人类的语言转换成计算机可以理解的数值形式,而词嵌入(Word Embedding)正是为了解决这个问题的重要技术。本文将详细讲解词嵌入的概念及其经典模型(Word2Vec、GloVe 和 FastText)的原理与区别。 1. 什么是词嵌入(Word Em…...

2024年数据记录
笔者注册时间超过98.06%的用户 CSDN 原力是衡量一个用户在 CSDN 的贡献和影响力的系统,笔者原力值超过99.99%的用户 其他年度数据...
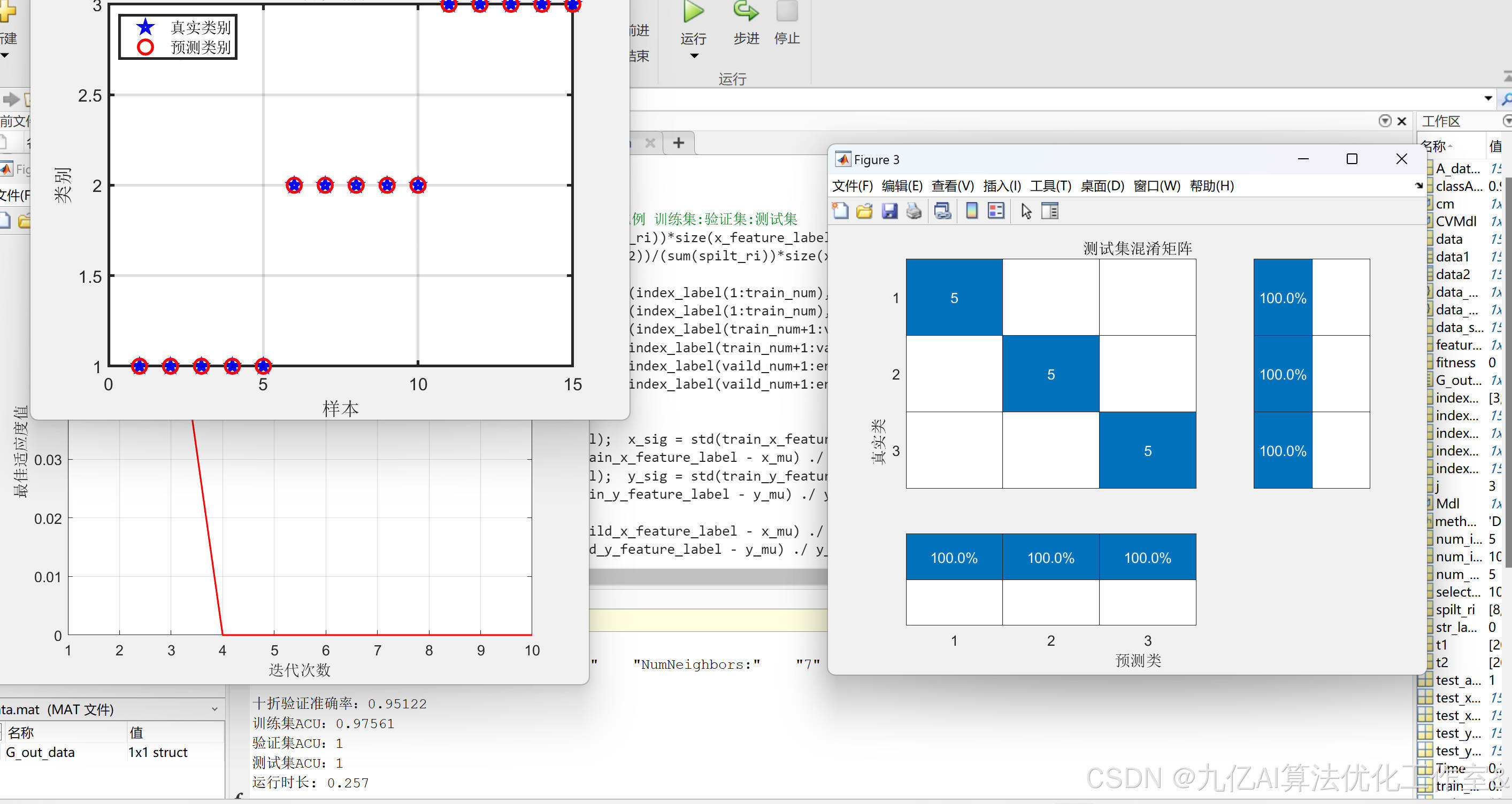
DBO优化最近邻分类预测matlab
蜣螂优化算法(Dung Beetle Optimizer,简称 DBO)作为一种新兴的群智能优化算法,于 2022 年末被提出,其灵感主要来源于蜣螂的滚球、跳舞、觅食、偷窃以及繁殖等行为。 本次使用的数据为 Excel 格式的分类数据集。该数据…...

Harbor 部署
harbor镜像仓库搭建 版本v2.10.3 文章目录 一. docker 安装 harbor1. harbor 配置http访问1.1 下载harbor二进制包1.2 修改配置文件1.3 运行1.4 访问 2.【可选】harbor 配置https访问2.1 自签证书2.1 修改配置文件2.3 修改hosts文件2.4 运行2.5 访问 二. k8s 安装harbor1 .安装…...

PSpice for TI体验
前言 基于 从零开始学 PSpice for TI 仿真工具 - 手把手操作实训课程_哔哩哔哩_bilibili 体验PSpice for TI的功能,并记录下来。文章内容大部分都参考自视频,可以理解成图文版。目前发现是没有支持中文语言,而且部分仿真,时间消耗…...

数据结构与算法 —— 常用算法模版
数据结构与算法 —— 常用算法模版 二分查找素数筛最大公约数与最小公倍数 二分查找 人间若有天堂,大马士革必在其中;天堂若在天空,大马士革必与之齐名。 —— 阿拉伯谚语 算法若有排序,二分查找必在其中;排序若要使用…...

苯乙醇苷类化合物的从头生物合成-文献精读108
Complete pathway elucidation of echinacoside in Cistanche tubulosa and de novo biosynthesis of phenylethanoid glycosides 管花肉苁蓉中松果菊苷全生物合成途径解析及苯乙醇苷类化合物的从头生物合成 摘要 松果菊苷(ECH)是最具代表性的苯乙醇苷…...

【C++】设计模式详解:单例模式
文章目录 Ⅰ. 设计一个类,不允许被拷贝Ⅱ. 请设计一个类,只能在堆上创建对象Ⅲ. 请设计一个类,只能在栈上创建对象Ⅳ. 请设计一个类,不能被继承Ⅴ. 请设计一个类,只能创建一个对象(单例模式)&am…...

CAN总线数据采集与分析
CAN总线数据采集与分析 目录 CAN总线数据采集与分析1. 引言2. 数据采集2.1 数据采集简介2.2 数据采集实现3. 数据分析3.1 数据分析简介3.2 数据分析实现4. 数据可视化4.1 数据可视化简介4.2 数据可视化实现5. 案例说明5.1 案例1:数据采集实现5.2 案例2:数据分析实现5.3 案例3…...

解决vsocde ssh远程连接同一ip,不同端口情况下,无法区分的问题
一般服务器会通过镜像分身或者容器的方式,一个ip分出多个端口给多人使用,但如果碰到需要连接同一user,同一个ip,不同端口的情况,vscode就无法识别,如下图所示,vscode无法区分该ip下不同端口的连接ÿ…...

AJAX案例——图片上传个人信息操作
黑马程序员视频地址: AJAX-Day02-11.图片上传https://www.bilibili.com/video/BV1MN411y7pw?vd_source0a2d366696f87e241adc64419bf12cab&spm_id_from333.788.videopod.episodes&p26 图片上传 <!-- 文件选择元素 --><input type"file"…...

团体程序设计天梯赛-练习集——L1-029 是不是太胖了
前言 5分级别里面目前做到的最难的一道题,但是非常简单,5分的题看看写点代码就行了。 L1-029 是不是太胖了 据说一个人的标准体重应该是其身高(单位:厘米)减去100、再乘以0.9所得到的公斤数。已知市斤的数值是公斤数…...

ubuntu20.04.6下运行VLC-Qt例子simple-player
下载examples-master.zip(https://github.com/vlc-qt/examples),编译运行simple-player 参考链接: https://blog.csdn.net/szn1316159505/article/details/143743735 本文运行环境 Qt 5.15.2 Qt creator 5.0.2 主要步骤…...

LabVIEW温度修正部件测试系统
LabVIEW温度修正部件测试系统 这个基于LabVIEW的温度修正部件测试系统旨在解决飞行器温度测量及修正电路的测试需求。该系统的意义在于提供一个可靠的测试平台,用于评估温度修正部件在实际飞行器环境中的性能表现,从而确保飞行器的安全性和可靠性。 系统…...