MATLAB图像处理:Sobel、Roberts、Canny等边缘检测算子
边缘是图像中像素值剧烈变化的区域,反映了目标的轮廓、纹理等关键信息。边缘检测是图像分割、目标识别等任务的基础。本文将系统解析 六种经典边缘检测算子 的数学原理、实现方法及适用场景,并给出完整的MATLAB代码示例和对比分析。
1. 边缘检测基础
1.1 边缘类型
- 阶跃边缘:像素灰度值在局部范围内发生突变(如物体与背景的交界)
- 斜坡边缘:灰度值逐渐变化,可能存在模糊或反光干扰
- 线状边缘:细长区域灰度与周围差异明显(如裂缝、文字笔画)
1.2 边缘检测流程
- 去噪:高斯滤波等预处理平滑图像
- 梯度计算:获取像素梯度幅值与方向
- 非极大值抑制:细化边缘宽度至单像素级
- 双阈值处理(可选):消除伪边缘,连接断裂区域
2. 一阶微分算子
2.1 Roberts算子
- 原理:利用对角线方向的差分近似梯度,检测45°和135°边缘
- 卷积核:

MATLAB实现:
img = im2double(imread('cameraman.tif'));
kernel_x = [1 0; 0 -1]; % Roberts横向核
kernel_y = [0 1; -1 0]; % Roberts纵向核
grad_x = imfilter(img, kernel_x, 'replicate');
grad_y = imfilter(img, kernel_y, 'replicate');
edge_roberts = sqrt(grad_x.^2 + grad_y.^2); % 梯度幅值
edge_roberts = edge_roberts > 0.2; % 直接阈值化
figure; imshow(img); title('原始图片');
figure; imshow(edge_roberts); title('Roberts边缘检测');

2.2 Sobel算子
- 原理:加权平均差分算法,对水平和垂直边缘敏感
- 卷积核:

MATLAB实现(带梯度方向):
[grad_x, grad_y] = imgradientxy(img, 'sobel');
[magnitude, direction] = imgradient(grad_x, grad_y);
edge_sobel = magnitude > 0.3; % 根据图像调整阈值
figure;
subplot(121), imshow(uint8(magnitude),[]), title('Sobel梯度幅值');
subplot(122), imshow(edge_sobel), title('二值化边缘');

2.3 Prewitt算子
-
原理:类似于Sobel,但无中心权重,对噪声更敏感
-
卷积核:

edge_prewitt = edge(img, 'prewitt', 0.1); % MATLAB内置函数简化计算
figure; imshow(edge_prewitt); title('Prewitt边缘检测');

一阶算子对比
| 算子 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|
| Roberts | 计算简单、边缘定位快 | 对噪声敏感,检测方向有限 | 高对比度快速检测 |
| Sobel | 抗噪较好,边缘较连续 | 细节可能丢失 | 通用场景的粗边缘提取 |
| Prewitt | 实现简单 | 噪声敏感,抗干扰能力差 | 无明显噪声的低复杂度需求 |
3. 二阶微分算子
3.1 Laplacian算子
- 原理:基于二阶导数,检测灰度突变点(对边缘方向无选择性)
- 卷积核:

laplacian_kernel = [0 1 0; 1 -4 1; 0 1 0]; % 标准Laplacian核
edge_laplacian = imfilter(img, laplacian_kernel, 'replicate');
edge_laplacian = edge_laplacian > max(edge_laplacian(:))*0.1;
figure; imshow(edge_laplacian); title('Laplacian边缘检测');

3.2 LoG算子(高斯-拉普拉斯)
- 原理:先高斯滤波平滑图像,再应用Laplacian算子(减少噪声干扰)
- 数学描述

- MATLAB实现:
sigma = 2; log_kernel = fspecial('log', 5, sigma); % 生成5x5 LoG滤波器 edge_log = imfilter(img, log_kernel, 'replicate'); edge_log = edge_log > 0.002; % 根据输出调整阈值 figure; imshow(edge_log); title('LoG边缘检测');

二阶算子特点
- Laplacian:对噪声敏感,易产生双边缘,需后处理
- LoG:通过高斯平滑减少噪声,边缘更连续,但计算量大
4. Canny算子(经典多阶段检测)
Canny算子整合了多项优化步骤,被广泛认为是最优的边缘检测算法。
4.1 核心步骤
- 高斯滤波:使用5×5高斯核平滑图像
- 计算梯度(Sobel算子)
- 非极大值抑制:沿梯度方向保留极大值点,细化边缘
- 双阈值检测:高阈值确定强边缘,低阈值连接弱边缘
4.2 MATLAB实现与参数调节
% 自定义Canny实现
sigma = 2;
threshold = [0.01, 0.05]; % 低阈值和高阈值(归一化)% 1. 高斯滤波
gauss_filter = fspecial('gaussian', 5, sigma);
smoothed = imfilter(img, gauss_filter, 'replicate');% 2. Sobel梯度计算
[grad_x, grad_y] = gradient(smoothed);
magnitude = sqrt(grad_x.^2 + grad_y.^2);
direction = atan2(grad_y, grad_x) * 180/pi; % 转换为角度% 3. 非极大值抑制
edge_thin = nonmax_suppression(magnitude, direction); % 需自定义函数% 4. 双阈值与边缘连接
edge_canny = hysteresis_threshold(edge_thin, threshold(1), threshold(2));% 展示结果并与MATLAB内置函数对比
figure;
subplot(121), imshow(edge_canny), title('自定义Canny');
subplot(122), imshow(edge(img, 'canny', threshold, sigma)), title('MATLAB内置Canny');function edge_out = nonmax_suppression(mag, angle)% 将角度划分为四个方向(0°, 45°, 90°, 135°)angle = mod(angle, 180);sector = zeros(size(angle));sector(angle >= 0 & angle < 22.5 | angle >= 157.5) = 0; % 0°sector(angle >= 22.5 & angle < 67.5) = 1; % 45°sector(angle >= 67.5 & angle < 112.5) = 2; % 90°sector(angle >= 112.5 & angle < 157.5) = 3; % 135°edge_out = zeros(size(mag));[rows, cols] = size(mag);for i = 2:rows-1for j = 2:cols-1switch sector(i,j)case 0 % 水平方向neighbors = [mag(i,j-1), mag(i,j+1)];case 1 % 45°neighbors = [mag(i-1,j+1), mag(i+1,j-1)];case 2 % 垂直neighbors = [mag(i-1,j), mag(i+1,j)];case 3 % 135°neighbors = [mag(i-1,j-1), mag(i+1,j+1)];endif mag(i,j) >= max(neighbors)edge_out(i,j) = mag(i,j);endendend
endfunction edge_final = hysteresis_threshold(edge_img, low, high)% 高阈值标记强边缘,低阈值连接相邻弱边缘strong = edge_img >= high;weak = edge_img >= low & edge_img < high;[y_weak, x_weak] = find(weak);edge_final = strong;% 8邻域内存在强边缘的弱边缘被保留for k = 1:length(y_weak)y = y_weak(k);x = x_weak(k);patch = strong(max(y-1,1):min(y+1,end), max(x-1,1):min(x+1,end));if any(patch(:))edge_final(y, x) = 1;endend
end

参数选择技巧:
- 高斯标准差(σ):σ越大,模糊效果越强,噪声抑制越好,但会降低边缘清晰度
- 双阈值比例:通常设置高阈值:低阈值 ≈ 2:1 或 3:1
5. 各算子效果对比与总结
实验结果对比
- Roberts:检出点状边缘,断裂较多
- Sobel:边缘较连续,但存在双线
- Canny:单像素级细边缘,抗噪能力最强
算子性能总结
| 算子 | 抗噪性 | 边缘连续性 | 计算复杂度 | 适用场景 |
|---|---|---|---|---|
| Roberts | 低 | 差 | 低 | 快速粗略检测,硬件实现 |
| Sobel | 中 | 良 | 中 | 通用场景,实时处理 |
| Prewitt | 低 | 中 | 中 | 低噪声简单图像 |
| Laplacian | 低 | 差 | 低 | 边缘点检测,需后处理 |
| LoG | 高 | 优 | 高 | 平滑图像中的精细边缘 |
| Canny | 高 | 优 | 高 | 高精度要求的复杂场景 |
6. 常见问题与解决方案
Q1:边缘检测后出现断裂或不连续
- 原因:阈值过高或噪声干扰
- 解决:
- 降低阈值或使用Canny双阈值自适应连接
- 加入形态学闭运算(
imclose)连接边缘
Q2:存在大量伪边缘(噪声误检)
- 优化方法:
- 预处理:应用中值滤波或高斯滤波去噪
- 后处理:通过面积过滤(
bwareaopen)移除小区域
Q3:如何优化实时边缘检测速度?
- 策略:
- 使用快速卷积算法(如行列分离的Sobel计算)
- 采用GPU加速(MATLAB的
gpuArray函数) - 降低图像分辨率(权衡精度与速度)
Q4:处理彩色图像时如何选择通道?
- 推荐方法:
- 转换为灰度图像后进行检测
- 分别检测RGB三通道边缘,再取并集
red_edge = edge(img(:,:,1), 'canny');
green_edge = edge(img(:,:,2), 'canny');
blue_edge = edge(img(:,:,3), 'canny');
combined_edge = red_edge | green_edge | blue_edge;
总结
边缘检测是图像分析的关键步骤,需根据具体场景灵活选择算子:
- 实时性要求高 → Sobel
- 高精度需求 → Canny
- 处理强噪声图像 → LoG或结合深度学习方法
相关文章:
MATLAB图像处理:Sobel、Roberts、Canny等边缘检测算子
边缘是图像中像素值剧烈变化的区域,反映了目标的轮廓、纹理等关键信息。边缘检测是图像分割、目标识别等任务的基础。本文将系统解析 六种经典边缘检测算子 的数学原理、实现方法及适用场景,并给出完整的MATLAB代码示例和对比分析。 1. 边缘检测基础 1…...

【设计模式】02-理解常见设计模式-结构型模式
上一篇,我们介绍了设计模式-创建型模式的内容,并给出了相关代码示范。 这一篇我们接着介绍剩下的内容之一“结构型模式” 一、概述 结构型模式主要用于处理类或对象的组合,以获得新的功能或实现更灵活的结构。 二、常见的结构型模式 1、适…...

LabVIEW太阳能制冷监控系统
在全球能源需求日益增长的背景下,太阳能作为一种无限再生能源,被广泛应用于各种能源系统中。本基于LabVIEW软件和STM32F105控制器的太阳能制冷监控系统的设计与实现,提供一个高效、经济的太阳能利用方案,以应对能源消耗的挑战。 项…...

MambaMorph brain MR-CT
loss代码实现了几种用于医学图像配准(Registration)和分割(Segmentation)任务的损失函数,主要包括以下几种: NCC (Normalized Cross-Correlation): 功能: 计算局部归一化互相关损失,用于衡量两个图像之间的相似性。 应用场景: 通常用于图像配准任务,通过最大化图像之间…...
基础与实践)
DeepSeek计算机视觉(Computer Vision)基础与实践
计算机视觉(Computer Vision)是人工智能领域的一个重要分支,专注于让计算机理解和处理图像和视频数据。计算机视觉技术广泛应用于图像分类、目标检测、图像分割、人脸识别等场景。DeepSeek提供了强大的工具和API,帮助我们高效地构建和训练计算机视觉模型。本文将详细介绍如…...
)
C语言-------结构体(1)
数据类型 (1)基本数据类型 整型 浮点型 字符型 (2)构造类型 数组 结构体 结构体: 用来处理,现实生活中,更复杂的数据的描述 用来 描述复杂数据的 一种用户自定义的数…...

单片机原理与运用
个人主页:java之路-CSDN博客(期待您的关注) 目录 一、走进单片机的世界 二、单片机是什么 (一)定义与本质 (二)与普通计算机的区别 三、单片机的工作原理深度剖析 (一)硬件组成及功能 &am…...

【leetcode】关于循环数组的深入分析
原题:https://leetcode.cn/problems/rotate-array/description/ 给定一个整数数组 nums,将数组中的元素向右轮转 k 个位置,其中 k 是非负数。 示例 1: 输入: nums [1,2,3,4,5,6,7], k 3 输出: [5,6,7,1,2,3,4] 解释: 向右轮转 1 步: [7,1…...

一个根据输入内容过滤下拉选的组件
1.element的select自定义过滤不是很灵,使用了input和dropdown 组件 <template><div class"autocomplete-wrapper"><!-- 使用 el-input 组件 --><el-inputv-model"inputValue"input"handleInput"placeholder&q…...

C++17中的clamp函数
一、std::clamp() 其实在前面简单介绍过这个函数,但当时只是一个集中的说明,为了更好的理解std::clamp的应用,本篇再详细进行阐述一次。std::clamp在C17中其定义的方式为: template< class T > constexpr const T& cl…...

Linux | 进程相关概念(进程、进程状态、进程优先级、环境变量、进程地址空间)
文章目录 进程概念1、冯诺依曼体系结构2、进程2.1基本概念2.2描述进程-PCB2.3组织进程2.4查看进程2.5通过系统调用获取进程标识符2.6通过系统调用创建进程-fork初识fork の 头文件与返回值fork函数的调用逻辑和底层逻辑 3、进程状态3.1状态3.2进程状态查看命令3.2.1 ps命令3.2.…...

$ npx electron-forge import 一直报权限问题 resource busy or locked,
jackLAPTOP-7DHDAAL0 MINGW64 /e/project/celetron-project/my-electron-app (master) $ npx electron-forge import > Checking your system > Checking git exists > Checking node version > Checking packageManager version √ Found node22.14.0 √ Found gi…...

sqli-labs靶场实录(四): Challenges
sqli-labs靶场实录: Challenges Less54确定字段数获取数据库名获取表名获取列名提取密钥值 Less55Less56Less57Less58爆库构造爆表构造爆列构造密钥提取构造 Less59Less60Less61Less62爆库构造 Less63Less64Less65免责声明: Less54 本关开始上难度了 可以看到此关仅…...

HTML,API,RestFul API基础
一文搞懂RESTful API - bigsai - 博客园 1. API 路径 开头必须 /,表示绝对路径,不支持 . 或 ..(相对路径)。API 结尾 / 通常不需要,但部分框架会自动处理 / → 无 /。 ✅ 推荐 GET /api/v1/products # 资源集合…...

Spring框架中都用到了哪些设计模式?
大家好,我是锋哥。今天分享关于【Spring框架中都用到了哪些设计模式?】面试题。希望对大家有帮助; Spring框架中都用到了哪些设计模式? 1000道 互联网大厂Java工程师 精选面试题-Java资源分享网 Spring框架中使用了大量的设计模…...
ubuntu服务器部署
关闭欢迎消息 服务器安装好 ubuntu 系统后,进行终端登录,会显示出很多的欢迎消息 通过在用户的根目录下执行 touch .hushlogin 命令,再次登录终端就不会出现欢迎消息 修改hostname显示 修改 /etc/hostname 文件内容为主机名,保…...

Centos7虚拟机安装及网络配置(二)
#二、centos7的网络配置-Nat模式 NAT模式也是VMware创建虚拟机的默认网络连接模式。使用NAT模式网络连接时,VMware会在主机上建立单独的专用网络,用以在主机和虚拟机之间相互通信。虚拟机向外部网络发送的请求数据"包裹",都会交由…...

关于视频去水印的一点尝试
一. 视频去水印的几种方法 1. 使用ffmpeg delogo滤镜 delogo 滤镜的原理是通过插值算法,用水印周围的像素填充水印的位置。 示例: ffmpeg -i input.mp4 -filter_complex "[0:v]delogox420:y920:w1070:h60" output.mp4 该命令表示通过滤镜…...

maven-antrun-plugin插件的用法
maven-antrun-plugin 是 Maven 中一个非常强大的插件,它允许你在 Maven 构建过程中运行 Apache Ant 任务。通过这个插件,你可以在 Maven 构建的各个阶段(如 compile、package 等)中执行自定义的 Ant 任务,比如复制文件…...

twisted实现MMORPG 游戏数据库操作封装设计与实现
在设计 MMORPG(大规模多人在线角色扮演游戏)时,数据库系统是游戏架构中至关重要的一部分。数据库不仅承担了游戏中各种数据(如玩家数据、物品数据、游戏世界状态等)的存储和管理任务,还必须高效地支持并发访…...

Java知识速记:Exception与Error的区别
Java知识速记:Exception与Error的区别 在Java编程中,异常处理是一个重要的概念。程序员需要了解如何有效识别和处理不同类型的错误,以提升程序的健壮性和可维护性。 什么是异常(Exception)? 异常是程序在运…...

CTF-web:java-h2 堆叠注入rce -- N1ctf Junior EasyDB
代码存在sql注入 // 处理登录表单的POST请求PostMapping({"/login"})public String handleLogin(RequestParam String username, RequestParam String password, HttpSession session, Model model) throws SQLException {// 验证用户凭据if (this.userService.valid…...

GDB 使用心得
一、 入门篇 理解 GDB 的作用: GDB 是 GNU 调试器的缩写,用于调试 C、C 等编程语言的程序。它可以帮助你: 跟踪程序执行流程设置断点,暂停程序执行查看和修改变量值分析程序崩溃原因 掌握基本命令: 启动 GDB: gdb <可执行文件>运行程序…...

电脑端调用摄像头拍照:从基础到实现
文章目录 1. 了解navigator.mediaDevices.getUserMedia API2. 创建 HTML 结构3. 编写 JavaScript 代码3.1 打开摄像头3.2 拍照 4. 完整代码5. 测试6. 注意事项及部署 在现代 Web 开发中,调用摄像头进行拍照是一个常见的功能,尤其是在需要用户上传头像、进…...

部署 DeepSeek R1各个版本所需硬件配置清单
DeepSeek-R1 通过其卓越的推理性能和灵活的训练机制,在 2025 年的春节期间受到了广泛关注。 DeepSeek-R1 是一款高性能的 AI 推理模型,主要通过强化学习技术来增强模型在复杂任务场景下的推理能力。 在本地部署 DeepSeek-R1 时,尤其是完整的…...

Java面试题——事务
65. Spring事务的实现方式和实现原理 Spring事务的本质其实就是数据库对事务的支持,没有数据库的事务支持,Spring是无法提供事务功能的。Spring事务实现主要有两种方法:编程式:beginTransaction()、commit()、rollback()等事务管理相关的方法࿰…...

算法18(力扣136)只出现一次的数字
1、问题 给你一个 非空 整数数组 nums,除了某个元素只出现一次以外,其余每个元素均出现两次。找出那个只出现了一次的元素。 你必须设计并实现线性时间复杂度的算法来解决此问题,且该算法只使用常量额外空间。 2、示例 (1&…...

SiliconCloud 支持deepseek,送2000w token
SiliconCloud SiliconCloud 邀请奖励持续进行,2000 万 Tokens 送不停! 邀请好友赚 2000 万 Tokens:每成功邀请一位新用户通过手机号码注册,您将获得 2000 万 Tokens;注册即送 2000 万 Tokens:受邀好友作为…...
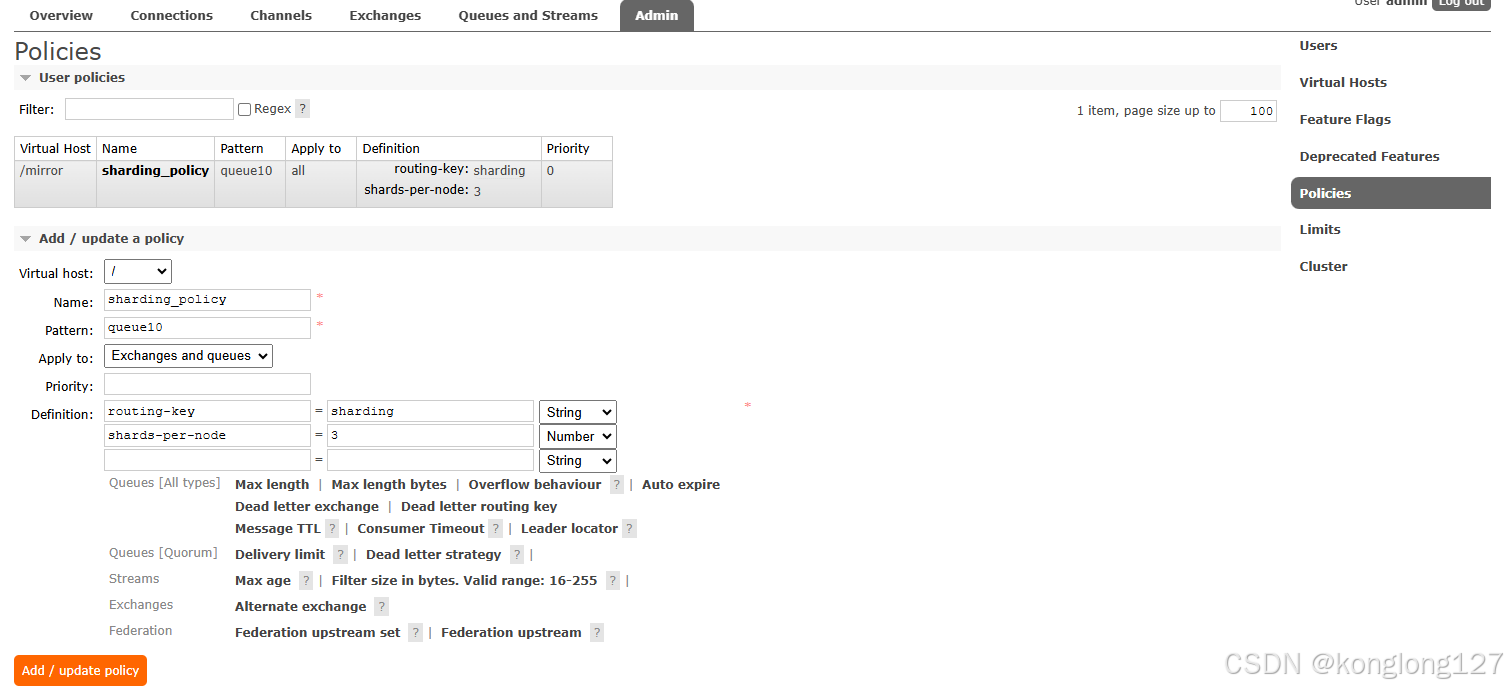
在nodejs中使用RabbitMQ(六)sharding消息分片
RabbitMQ 的分片插件(rabbitmq_sharding)允许将消息分布到多个队列中,这在消息量很大或处理速度要求高的情况下非常有用。分片功能通过将消息拆分到多个队列中来平衡负载,从而提升消息处理的吞吐量和可靠性。它能够在多个队列之间…...

STM32 I2C通信协议说明
目录 背景 I2C协议 数据的有效性 I2C通信开始和停止条件 I2C数据传输 发送 响应 正常情况: 异常情况: 主机结束接收 写寄存器的标准流程 读寄存器的标准流程 仲裁机制 时钟同步 SDA线的仲裁 程序 背景 对单片机的三大通信中的I2C通信进…...