ros通信与回调函数多线程应用
一、ros topic通信流程
参考资料:
一个ros节点至少有几个线程(1058): https://zhuanlan.zhihu.com/p/680188065
鱼香rostopic底层流程(1005~1008): https://zhuanlan.zhihu.com/p/656716718
王方浩-ROS发布订阅实现(二): https://zhuanlan.zhihu.com/p/439208597
- 基础的topic通信流程涉及到三个线程:
①发布者节点调用publish()函数
②pollset线程中处理基于socket的tcp通信和基于文件标识符的事件处理
③订阅者节点spin()中处理回调函数队列 - publish() 函数只是把要发送的消息放到了消息队列中,实际上并没有真的执行tcp通信,这跟普通的基于socket的通信是类似的。这个消息队列的大小由定义发布者时的参数定义,这个队列建立的意义实际上是为了tcp通信建立的,tcp通信需要时间(通信时间和等待系统调度的时间),与订阅者的回调函数队列是不同的。除了将数据放入队列,publish还触发了一个信号poll_signal_,这个信号在pollset中被轮讯监控,一旦出发就调用槽函数processPublishQueues.
- pollset线程中的槽函数processPublishQueues,就会根据subscrib_link列表依次实现tcp通讯,subscrib_link是一个所有不同tcp连接的线程池。这个列表是节点在调用advertise时注册进去的。topic通信是异步的,所以实质上一个topic如果有两个发布者和三个订阅者,就要建立六条独立的tcp连接。pollset线程除了处理发布的线程,也把接受的消息放进了订阅者的队列中
- 订阅者正常情况下是一个单线程的程序spin()中是一个循环,不断的监控回调函数队列,有数据时就依次执行。如果用spinonce()的话,就是每次调用时把队列中的数据全部执行一次.
- 以上就是一个基本流程,具体细节可能不是很清楚,但基本上知道ros自己有单独的线程在处理tcp通信,而节点中的代码只是在处理队列信息就可以了
二、ros 多线程通信
参考资料:
动手学ROS(7):精讲多线程之MultiThreadedSpinner: https://zhuanlan.zhihu.com/p/375418691
- 代码主要都来自上面的链接
- ros的多线程主要体现在回调函数队列的处理上
1、设置两个发布者
- 这两个发布者都以1hz的频率往不同的topic发送消息
- 发布者A
#include "ros/ros.h"
#include "std_msgs/String.h"
#include <sstream>int main(int argc, char **argv)
{// 初始化ROS节点ros::init(argc, argv, "talker_A");ros::NodeHandle n;// 创建两个发布者对象,分别发布到"A/message"和"B/message"主题ros::Publisher pub_a = n.advertise<std_msgs::String>("A/message", 100);// 设置发布频率为1kHzros::Rate loop_rate(1);int count = 0;while (ros::ok()){// 创建消息对象std_msgs::String msg_a;// 填充消息内容std::stringstream ss_a;ss_a << "Hello from A " << count;msg_a.data = ss_a.str();// 打印发布的信息ROS_INFO("%s", msg_a.data.c_str());// 发布消息pub_a.publish(msg_a);// 增加计数器count++;// 休眠一段时间以达到设定的发布频率loop_rate.sleep();}return 0;
}- 发布者B
#include "ros/ros.h"
#include "std_msgs/String.h"
#include <sstream>int main(int argc, char **argv)
{// 初始化ROS节点ros::init(argc, argv, "talker_B");ros::NodeHandle n;// 创建两个发布者对象,分别发布到"A/message"和"B/message"主题ros::Publisher pub_b = n.advertise<std_msgs::String>("B/message", 1000);// 设置发布频率为1kHzros::Rate loop_rate(1);int count = 0;while (ros::ok()){// 创建消息对象std_msgs::String msg_b;// 填充消息内容std::stringstream ss_b;ss_b << "Hello from B " << count;msg_b.data = ss_b.str();// 发布消息pub_b.publish(msg_b);// 打印发布的信息ROS_INFO("%s", msg_b.data.c_str());// 增加计数器count++;// 休眠一段时间以达到设定的发布频率loop_rate.sleep();}return 0;
}2、单spin线程

#include <thread>#include "ros/ros.h"#include "std_msgs/String.h"void CallbackA(const std_msgs::String::ConstPtr &msg){std::this_thread::sleep_for(std::chrono::seconds(2));ROS_INFO(" I heard: [%s]", msg->data.c_str());}void CallbackB(const std_msgs::String::ConstPtr &msg){ROS_INFO(" I heard: [%s]", msg->data.c_str());}int main(int argc, char **argv){ros::init(argc, argv, "listener");ros::NodeHandle n;ros::Subscriber sub_b = n.subscribe("B/message", 1000, CallbackB);ros::Subscriber sub_a = n.subscribe("A/message", 1000, CallbackA);ros::spin();return 0;}
(1) 测试1:先启动订阅者,然后启动两个发布者
- 由于是手动启动,A节点早,所以最开始有多个A
- 可以看到B被A托慢了,也变成两秒一次了
[ INFO] [1740131084.794161868]: I heard: [Hello from A 1]
[ INFO] [1740131086.796284945]: I heard: [Hello from A 2]
[ INFO] [1740131088.796593596]: I heard: [Hello from A 3]
[ INFO] [1740131088.796690551]: I heard: [Hello from B 1]
[ INFO] [1740131090.796933583]: I heard: [Hello from A 4]
[ INFO] [1740131090.797038170]: I heard: [Hello from B 2]
[ INFO] [1740131092.797252138]: I heard: [Hello from A 5]
[ INFO] [1740131092.797336626]: I heard: [Hello from B 3]
[ INFO] [1740131094.797485092]: I heard: [Hello from A 6]
[ INFO] [1740131094.797575846]: I heard: [Hello from B 4]
[ INFO] [1740131096.797819265]: I heard: [Hello from A 7]
[ INFO] [1740131096.797901295]: I heard: [Hello from B 5]
[ INFO] [1740131098.798104208]: I heard: [Hello from A 8]
[ INFO] [1740131098.798182412]: I heard: [Hello from B 6]
[ INFO] [1740131100.798384053]: I heard: [Hello from A 9]
[ INFO] [1740131100.798458471]: I heard: [Hello from B 7]3、多spin线程非并发

#include <thread>#include "ros/ros.h"#include "std_msgs/String.h"void CallbackA(const std_msgs::String::ConstPtr &msg){std::this_thread::sleep_for(std::chrono::seconds(2));ROS_INFO(" I heard: [%s]", msg->data.c_str());}void CallbackB(const std_msgs::String::ConstPtr &msg){ROS_INFO(" I heard: [%s]", msg->data.c_str());}int main(int argc, char **argv){ros::init(argc, argv, "listener");ros::NodeHandle n;ros::Subscriber sub_a = n.subscribe("A/message", 10, CallbackA);ros::Subscriber sub_b = n.subscribe("B/message", 10, CallbackB);ros::MultiThreadedSpinner spinner(2);spinner.spin();return 0;}
(2) 测试2:先启动订阅者,然后启动两个发布者
- 注意这里修改了订阅者队列的长度
- 可以看到B不再被托慢了,但是在持续一段时间后A会出现丢包,因为A处理的慢,所以队列被A的数据沾满了
- 这两个线程会区分两个函数,也就是非并发,即不会两个线程都去处理同一个类型的回调函数,所以B一直没有丢包,就是因为一直有一个线程在处理B
[ INFO] [1740131454.639828056]: I heard: [Hello from B 1]
[ INFO] [1740131454.653981192]: I heard: [Hello from A 1]
[ INFO] [1740131455.639724860]: I heard: [Hello from B 2]
[ INFO] [1740131456.639754199]: I heard: [Hello from B 3]
[ INFO] [1740131456.654096513]: I heard: [Hello from A 2]
[ INFO] [1740131457.639836399]: I heard: [Hello from B 4]
[ INFO] [1740131458.639711465]: I heard: [Hello from B 5]
[ INFO] [1740131458.654176314]: I heard: [Hello from A 3]
[ INFO] [1740131459.639715444]: I heard: [Hello from B 6]
[ INFO] [1740131460.639766550]: I heard: [Hello from B 7]
[ INFO] [1740131460.654252110]: I heard: [Hello from A 4]
[ INFO] [1740131461.639824670]: I heard: [Hello from B 8]
[ INFO] [1740131462.639892430]: I heard: [Hello from B 9]
[ INFO] [1740131462.654330989]: I heard: [Hello from A 5]
[ INFO] [1740131463.640043684]: I heard: [Hello from B 10]
[ INFO] [1740131464.639945528]: I heard: [Hello from B 11]
[ INFO] [1740131464.654449080]: I heard: [Hello from A 6]
[ INFO] [1740131465.640064511]: I heard: [Hello from B 12]
[ INFO] [1740131466.639987938]: I heard: [Hello from B 13]
[ INFO] [1740131466.654532060]: I heard: [Hello from A 7]
[ INFO] [1740131467.639809394]: I heard: [Hello from B 14]
[ INFO] [1740131468.639899303]: I heard: [Hello from B 15]
[ INFO] [1740131468.654613126]: I heard: [Hello from A 8]
[ INFO] [1740131469.639891146]: I heard: [Hello from B 16]
[ INFO] [1740131470.639872857]: I heard: [Hello from B 17]
[ INFO] [1740131470.654735428]: I heard: [Hello from A 9]
[ INFO] [1740131471.639807625]: I heard: [Hello from B 18]
[ INFO] [1740131472.639937912]: I heard: [Hello from B 19]
[ INFO] [1740131472.654906283]: I heard: [Hello from A 10]
[ INFO] [1740131473.639993581]: I heard: [Hello from B 20]
[ INFO] [1740131474.639798626]: I heard: [Hello from B 21]
[ INFO] [1740131474.655083576]: I heard: [Hello from A 12]
[ INFO] [1740131475.639838516]: I heard: [Hello from B 22]
[ INFO] [1740131476.639747335]: I heard: [Hello from B 23]
[ INFO] [1740131476.655254436]: I heard: [Hello from A 14]
[ INFO] [1740131477.639884596]: I heard: [Hello from B 24]
[ INFO] [1740131478.639752969]: I heard: [Hello from B 25]
[ INFO] [1740131478.655428197]: I heard: [Hello from A 16]
[ INFO] [1740131479.639717125]: I heard: [Hello from B 26]
[ INFO] [1740131480.639765754]: I heard: [Hello from B 27]
[ INFO] [1740131480.655604308]: I heard: [Hello from A 18]
[ INFO] [1740131481.639775598]: I heard: [Hello from B 28]
[ INFO] [1740131482.639767451]: I heard: [Hello from B 29]
[ INFO] [1740131482.655720449]: I heard: [Hello from A 20]
[ INFO] [1740131483.639719414]: I heard: [Hello from B 30]
[ INFO] [1740131484.639791912]: I heard: [Hello from B 31]
[ INFO] [1740131484.655802413]: I heard: [Hello from A 22]
[ INFO] [1740131485.639867103]: I heard: [Hello from B 32]
[ INFO] [1740131486.639875775]: I heard: [Hello from B 33]
[ INFO] [1740131486.655971307]: I heard: [Hello from A 24]
[ INFO] [1740131487.639853388]: I heard: [Hello from B 34]
[ INFO] [1740131488.639927926]: I heard: [Hello from B 35]
[ INFO] [1740131488.656069911]: I heard: [Hello from A 26]
[ INFO] [1740131489.639944256]: I heard: [Hello from B 36]
[ INFO] [1740131490.639953991]: I heard: [Hello from B 37]
[ INFO] [1740131490.656157923]: I heard: [Hello from A 28]
[ INFO] [1740131491.639920782]: I heard: [Hello from B 38]
[ INFO] [1740131492.639786618]: I heard: [Hello from B 39]
[ INFO] [1740131492.656243807]: I heard: [Hello from A 30]
[ INFO] [1740131493.639929171]: I heard: [Hello from B 40]
[ INFO] [1740131494.639995655]: I heard: [Hello from B 41]
[ INFO] [1740131494.656327222]: I heard: [Hello from A 32]
[ INFO] [1740131495.639892878]: I heard: [Hello from B 42]
[ INFO] [1740131496.639876764]: I heard: [Hello from B 43]
[ INFO] [1740131496.656411572]: I heard: [Hello from A 34]
[ INFO] [1740131497.639974678]: I heard: [Hello from B 44]
[ INFO] [1740131498.639951815]: I heard: [Hello from B 45]
[ INFO] [1740131498.656500217]: I heard: [Hello from A 36]
[ INFO] [1740131499.639837483]: I heard: [Hello from B 46]4、多spin线程并发

#include <thread>#include "ros/ros.h"#include "std_msgs/String.h"void ChatterCallback(const std_msgs::String::ConstPtr& msg) {ROS_INFO(" I heard: [%s]", msg->data.c_str());std::this_thread::sleep_for(std::chrono::seconds(2));}int main(int argc, char **argv) {ros::init(argc, argv, "listener");ros::NodeHandle n;ros::SubscribeOptions ops;ops.init<std_msgs::String>("A/message", 1, ChatterCallback);ops.allow_concurrent_callbacks = true;ros::Subscriber sub1 = n.subscribe(ops);ros::MultiThreadedSpinner spinner(2);spinner.spin();return 0;}
(3) 测试3:先启动订阅者,然后启动A发布者
- 注意这里修改了订阅者队列的长度
- A不再丢包,因为两个线程可以同时处理同一个类型的回调,注意这里只是同一个类型,不是同一个
- 注意这里由于涉及到两个线程操作同一个类型的回调,如果回调里有共享资源,需要有锁
- 上面非并发的实际上如果有共享资源的话也需要
[ INFO] [1740131990.803107129]: I heard: [Hello from A 1]
[ INFO] [1740131991.802900084]: I heard: [Hello from A 2]
[ INFO] [1740131992.804808048]: I heard: [Hello from A 3]
[ INFO] [1740131993.803073730]: I heard: [Hello from A 4]
[ INFO] [1740131994.804944148]: I heard: [Hello from A 5]
[ INFO] [1740131995.803246682]: I heard: [Hello from A 6]
[ INFO] [1740131996.805189157]: I heard: [Hello from A 7]
[ INFO] [1740131997.803411020]: I heard: [Hello from A 8]
[ INFO] [1740131998.805365004]: I heard: [Hello from A 9]
[ INFO] [1740131999.803570627]: I heard: [Hello from A 10]
[ INFO] [1740132000.805542830]: I heard: [Hello from A 11]
[ INFO] [1740132001.803732381]: I heard: [Hello from A 12]
[ INFO] [1740132002.805717474]: I heard: [Hello from A 13]
[ INFO] [1740132003.803927256]: I heard: [Hello from A 14]
[ INFO] [1740132004.805870949]: I heard: [Hello from A 15]
[ INFO] [1740132005.804098520]: I heard: [Hello from A 16]
[ INFO] [1740132006.806118693]: I heard: [Hello from A 17]
[ INFO] [1740132007.804269056]: I heard: [Hello from A 18]
[ INFO] [1740132008.806373739]: I heard: [Hello from A 19]
[ INFO] [1740132009.804453823]: I heard: [Hello from A 20]
[ INFO] [1740132010.806567750]: I heard: [Hello from A 21]
[ INFO] [1740132011.804627770]: I heard: [Hello from A 22]
[ INFO] [1740132012.806739975]: I heard: [Hello from A 23]
[ INFO] [1740132013.804808557]: I heard: [Hello from A 24]4、多回调函数队列

#include <thread>#include <ros/callback_queue.h>#include "ros/ros.h"#include "std_msgs/String.h"void CallbackA(const std_msgs::String::ConstPtr& msg) {ROS_INFO(" I heard: [%s]", msg->data.c_str());std::this_thread::sleep_for(std::chrono::seconds(2));}void CallbackB(const std_msgs::String::ConstPtr& msg) {ROS_INFO(" I heard: [%s]", msg->data.c_str());}int main(int argc, char **argv) {ros::init(argc, argv, "listener");ros::NodeHandle n;ros::Subscriber sub_b = n.subscribe("B/message", 10, CallbackB);ros::NodeHandle n_a;ros::CallbackQueue callback_queue_a;n_a.setCallbackQueue(&callback_queue_a);ros::Subscriber sub_a = n_a.subscribe("A/message", 10, CallbackA);std::thread spinner_thread_a([&callback_queue_a]() {ros::SingleThreadedSpinner spinner_a;spinner_a.spin(&callback_queue_a);});ros::spin();spinner_thread_a.join();return 0;}(3) 测试3:先启动订阅者,然后启动A,过一段时间开始出现丢包后启动B
- 这实际上就是用不同的句柄在自己设置的线程里设置发布者了
- A持续一段时间后,应该填满了回调队列,如果用之前那种就没办法在启动B后立即获得B了,而这种则不受影响,因为有两个独立的回调函数队列
[ INFO] [1740132598.928969904]: I heard: [Hello from A 1]
[ INFO] [1740132600.930244784]: I heard: [Hello from A 2]
[ INFO] [1740132602.930408245]: I heard: [Hello from A 3]
[ INFO] [1740132604.930572266]: I heard: [Hello from A 4]
[ INFO] [1740132606.930738016]: I heard: [Hello from A 5]
[ INFO] [1740132608.930896064]: I heard: [Hello from A 6]
[ INFO] [1740132610.931070513]: I heard: [Hello from A 7]
[ INFO] [1740132612.931232193]: I heard: [Hello from A 8]
[ INFO] [1740132614.931404774]: I heard: [Hello from A 9]
[ INFO] [1740132616.931579713]: I heard: [Hello from A 10]
[ INFO] [1740132618.931739429]: I heard: [Hello from A 12]
[ INFO] [1740132620.931897491]: I heard: [Hello from A 14]
[ INFO] [1740132622.932063793]: I heard: [Hello from A 16]
[ INFO] [1740132624.932231221]: I heard: [Hello from A 18]
[ INFO] [1740132626.932386668]: I heard: [Hello from A 20]
[ INFO] [1740132626.941445056]: I heard: [Hello from B 1]
[ INFO] [1740132627.941439882]: I heard: [Hello from B 2]
[ INFO] [1740132628.932554571]: I heard: [Hello from A 22]
[ INFO] [1740132628.941478266]: I heard: [Hello from B 3]
[ INFO] [1740132629.941387904]: I heard: [Hello from B 4]
[ INFO] [1740132630.932677572]: I heard: [Hello from A 24]
[ INFO] [1740132630.941351494]: I heard: [Hello from B 5]
[ INFO] [1740132631.941298778]: I heard: [Hello from B 6]
[ INFO] [1740132632.932823637]: I heard: [Hello from A 26]
[ INFO] [1740132632.941288302]: I heard: [Hello from B 7]相关文章:
ros通信与回调函数多线程应用
一、ros topic通信流程 参考资料: 一个ros节点至少有几个线程(1058): https://zhuanlan.zhihu.com/p/680188065 鱼香rostopic底层流程(1005~1008): https://zhuanlan.zhihu.com/p/656716718 王方浩-ROS发布订阅实现(二): https://zhuanlan.zhihu.com/p/439208597 基础的topic…...

【蓝桥杯集训·每日一题2025】 AcWing 6134. 哞叫时间II python
6134. 哞叫时间II Week 1 2月20日 农夫约翰正在试图向埃尔茜描述他最喜欢的 USACO 竞赛,但她很难理解为什么他这么喜欢它。 他说「竞赛中我最喜欢的部分是贝茜说『现在是哞哞时间』并在整个竞赛中一直哞哞叫」。 埃尔茜仍然不理解,所以农夫约翰将竞赛…...

【CXX】5 桥接模块参考
1 CXX主要概念概览已经涵盖了CXX用来表示语言边界的高级模型。本章在此基础上详细介绍#[cxx::bridge]的语法和功能。 extern “Rust” ——将不透明的Rust类型、Rust函数、Rust方法暴露给C;具有生命周期的函数。extern“C”——绑定不透明的C类型、C函数、C成员函数…...

open62541,有点问题
要运行 open62541 提供的示例服务端程序,您需要确保以下几点: 代码已正确编译。了解如何启动服务端示例。确认服务端是否正常运行。 以下是详细的步骤和说明: 1. 确保代码已正确编译 在运行任何示例之前,您需要先完成项目的构建…...

智能交通系统(Intelligent Transportation Systems):智慧城市中的交通革新
智能交通系统(Intelligent Transportation Systems, ITS)是利用先进的信息技术、通信技术、传感技术、计算机技术以及自动化技术等,来提升交通系统效率和安全性的一种交通管理方式。ITS通过收集和分析交通数据,智能化地调度、控制…...

【TOT】Tree-of-Thought Prompting
Tree-of-Thought Prompting Tree-of-Thought Prompting In one example, a ToT prompt improves ChatGPT 3.5’s reasoning ability to answer a question that could previously only be answered by ChatGPT 4. 赋予了gpt3 推理能力,这能力只有gpt4才有。 增强、反馈和贡献 …...

内置函数用法
目录 1. 概述 2. 数学运算 2.1 求绝对值函数 abs( ) 2.2 取近似值 round( ) 2.3 求次方 pow( ) 2.4 求商和余数 divmod( ) 2.5 求最大值 max( ) 2.6 求最小值 min( ) 2.7 求累加和 sum( ) 2.8 eval( ) 3. 类型转换 3.1 #ord( ):字…...

基于LM Arena 的 LLM 基准测试排行榜:DeepSeek-R1 排名第 5
打开 Arena 网站:https://lmarena.ai/,点开 Leaderboard 可以看到上图的排行榜,可以看到 DeepSeek-R1 排名第 5。...

图数据库Neo4j面试内容整理-建模实践
在 Neo4j 中进行图数据建模(Graph Modeling)是设计和构建高效图数据库系统的关键。图数据库与关系型数据库不同,图数据建模强调的是如何通过节点、关系、标签和属性来表示和组织数据之间的复杂联系。因此,图数据库的建模过程不仅需要理解数据本身,还需要考虑查询的效率和扩…...

晶闸管的串联使用
1、何时需要使用晶闸管串联 单个晶闸管的额定电压是有一定限度的,当实际电路要求晶闸管承受的电压值大于单个晶闸管的额定电压时,可以用两个或两个以上同型号的晶闸管串联起来使用。 多个晶闸管串联时,由于各晶闸管的特性不可能完全一致,这样将导致晶闸管在阻断状态、开通与…...

【QT】第一个 QT程序(对象树)
🌈 个人主页:Zfox_ 🔥 系列专栏:Qt 目录 一:🔥 QtHelloWorld程序 🦋 使⽤"标签"实现纯代码⽅式实现可视化操作实现 🦋 使⽤"按钮"实现可视化操作实现纯代码实现…...

游戏引擎学习第113天
仓库:https://gitee.com/mrxiao_com/2d_game_2 黑板:优化的基本过程 在游戏编程中,优化是一个非常重要的学习内容,尤其是想要成为专业开发者时。优化的核心是理解代码的执行速度,以及如何提升其性能。在这个阶段,已经…...

Linux 本地部署 Deepseek-R1 大模型!
DeepSeek-R1 的发布,掀起了一场风暴! 开源、强大、本地可部署,真正私有的 AI 助手,不受网络、隐私等限制,数据安全感直接拉满! 今天,手把手带你在 Linux 上本地部署 DeepSeek-R1,关…...

【深度学习】Pytorch的深入理解和研究
一、Pytorch核心理解 PyTorch 是一个灵活且强大的深度学习框架,广泛应用于研究和工业领域。要深入理解和研究 PyTorch,需要从其核心概念、底层机制以及高级功能入手。以下是对 PyTorch 的深入理解与研究的详细说明。 1. 概念 动态计算图(D…...

IDEA + 通义灵码AI程序员:快速构建DDD后端工程模板
作者:陈荣健 IDEA 通义灵码AI程序员:快速构建DDD后端工程模板 在软件开发过程中,一个清晰、可维护、可扩展的架构至关重要。领域驱动设计 (DDD) 是一种软件开发方法,它强调将软件模型与业务领域紧密结合,从而构建更…...

内容中台重构企业内容管理的价值维度与实施路径
内容概要 在数字化转型进程中,企业内容管理(ECM)与内容中台的差异性体现在价值维度的重构与能力边界的突破。传统ECM系统通常聚焦于文档存储、权限控制等基础功能,而内容中台通过标准化流程引擎与智能工具链,构建起覆…...

CPU封装形式解析:从传统到先进封装的技术演进
中央处理器(CPU)的封装技术是半导体制造的关键环节,直接影响芯片的电气性能、散热效率和物理可靠性。随着半导体工艺的不断进步,封装形式从早期的简单结构演变为复杂的多维集成方案。本文将系统解析CPU的主流封装形式及其技术特点…...

Spring Boot 应用(官网文档解读)
Spring Boot 启动方式 SpringApplication.run(MyApplication.class, args); Spring Boot 故障分析器 在Spring Boot 项目启动发生错误的时候,我们通常可以看到上面的内容,即 APPLICATION FAILED TO START,以及后面的错误描述。这个功能是通过…...

【智能客服】ChatGPT大模型话术优化落地方案
本文原创作者:姚瑞南 AI-agent 大模型运营专家,先后任职于美团、猎聘等中大厂AI训练专家和智能运营专家岗;多年人工智能行业智能产品运营及大模型落地经验,拥有AI外呼方向国家专利与PMP项目管理证书。(转载需经授权) 目录 一、项目背景 1.1 行业背景 1.2 业务现…...

1.22作业
1 Web-php-unserialize __construct()与$file、__destruct() __wakeup()检查 先绕过wakeup函数: O:4:"Demo":2:{s:10:"Demofile";s:8:"fl4g.php";}1.PHP序列化的时候对public protected private变量的处理方式是不同的 public无标…...

蓝桥杯 Day6 贪心
贪心 1.要点 2.例题 2022 砍竹子 学习: 1.模拟砍竹子砍到高度1,不过要记录过程高度,以便后续判断是否存在(想到集合哈希),然后外面嵌套数组(活用数据结构)resize给大小 vector<unordered_set<ll>> hs;//记录第i根竹子下降到1过程中的每…...
学习aigc
DALLE2 论文 Hierarchical Text-Conditional Image Generation with CLIP Latents [2204.06125] Hierarchical Text-Conditional Image Generation with CLIP LatentsAbstract page for arXiv paper 2204.06125: Hierarchical Text-Conditional Image Generation with CLIP L…...
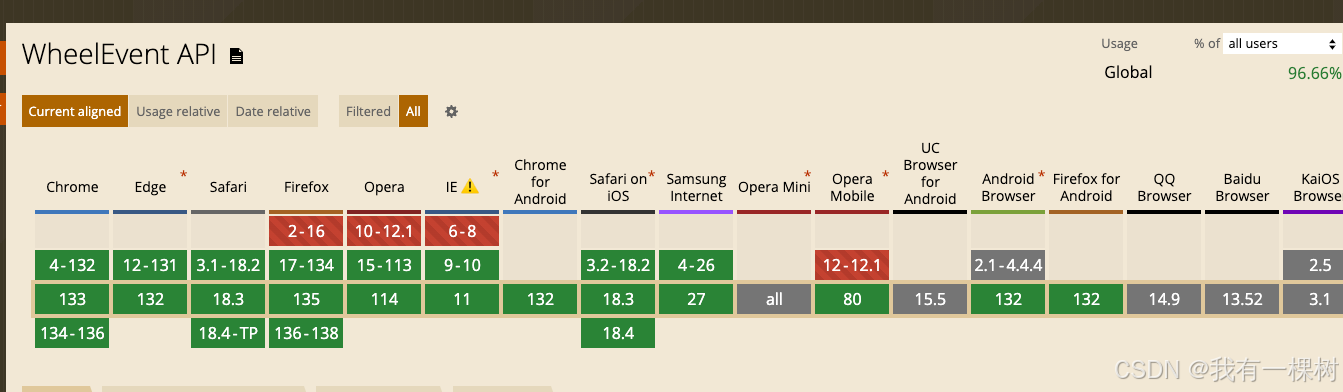
overflow-x: auto 使用鼠标实现横向滚动,区分触摸板和鼠标滚动事件的方法
假设一个 div 的滚动只设置了 overflow-x: auto 我们发现使用鼠标的滚轮是无法左右滚动的,但是使用笔记本电脑的触摸板,或者在移动设备上是可以滚动的。所以我们需要兼容一下鼠标的横向滚动功能。 我们可以监控 wheel 事件,然后根据位置来计…...

模拟实现Java中的计时器
定时器是什么 定时器也是软件开发中的⼀个重要组件. 类似于⼀个 "闹钟". 达到⼀个设定的时间之后, 就执⾏某个指定好的代码. 前端/后端中都会用到计时器. 定时器是⼀种实际开发中⾮常常⽤的组件. ⽐如⽹络通信中, 如果对⽅ 500ms 内没有返回数据, 则断开连接尝试重…...

Ubuntu 的RabbitMQ安装
目录 1.安装Erlang 查看erlang版本 退出命令 2. 安装 RabbitMQ 3.确认安装结果 4.安装RabbitMQ管理界面 5.启动服务并访问 1.启动服务 2.查看服务状态 3.通过IP:port 访问界面 4.添加管理员用户 a)添加用户名:admin,密码࿱…...
)
设计模式教程:命令模式(Command Pattern)
1. 什么是命令模式? 命令模式(Command Pattern)是一种行为型设计模式。它将请求封装成一个对象,从而使你能够用不同的请求、队列和日志请求以及支持可撤销操作。 简单来说,命令模式通过把请求封装成对象的方式解耦了…...

JavaScript数组常用的方法有哪些?map、filter、reduce 的区别和使用场景是什么?
JavaScript数组常用的方法有哪些?map、filter、reduce 的区别和使用场景是什么? JavaScript 数组常用方法 JavaScript 数组有很多实用的方法,以下先简单介绍一些常见的基础方法,再重点讲解 map、filter、reduce 这三个高阶函数。…...

vim修改只读文件
现象 解决方案 对于有root权限的用户,在命令行输入 :wq! 即可强制保存退出...

【DeepSeek】本地部署,保姆级教程
deepseek网站链接传送门:DeepSeek 在这里主要介绍DeepSeek的两种部署方法,一种是调用API,一种是本地部署。 一、API调用 1.进入网址Cherry Studio - 全能的AI助手选择立即下载 2.安装时位置建议放在其他盘,不要放c盘 3.进入软件后…...

为AI聊天工具添加一个知识系统 之114 详细设计之55 知识表征
本文要点 要点 项目名称:为使用AI聊天工具的聊天者添加一个知识系统 项目背景: 在现在各种AI聊天工具层出不穷的今天,我觉得特别需要一个通用的AI聊天工具的图形界面能够为每个聊天者(或一个利益相关者组织)建立自…...