神经形态视觉的实时动态避障系统:突破传统SLAM的响应延迟瓶颈
引言:机器人感知的实时性挑战
斯坦福机器人实验室采用异步脉冲神经网络处理DVS事件相机数据后,动态障碍物响应延迟从34ms降至0.9ms。在20m²复杂场景避障测试中,基于神经形态芯片的路径规划系统将SLAM更新频率提升至10kHz,较传统GPU方案能耗降低97%。其事件驱动架构使系统在80km/h移动速度下实现2cm精度定位,功耗稳定在1.2W。
一、传统视觉算法的物理局限
1.1 不同感知方案性能对比(动态场景)
| 属性 | 双目视觉 | LiDAR方案 | 事件相机方案 |
|---|---|---|---|
| 数据速率 | 30Hz RGB | 1.5M点/秒 | 1.2M事件/ms |
| 动态响应延时 | 120ms | 60ms | 0.8ms |
| 功耗(移动平台) | 18W | 35W | 0.4W |
| 光照适应范围(lux) | 10-10^4 | 不限 | 0.1-10^6 |

二、神经形态计算架构
2.1 脉冲卷积特征提取器
import snntorch as snn
import torchclass SpikingResBlock(nn.Module):def __init__(self, in_ch, out_ch):super().__init__()self.conv1 = snn.Conv2d(in_ch, out_ch,3, bias=False)self.lif1 = snn.Leaky(beta=0.9, threshold=0.6)self.conv2 = snn.Conv2d(out_ch, out_ch,3, padding=1)self.lif2 = snn.Leaky(beta=0.95, threshold=0.7)def forward(self, x):mem1 = self.lif1.init_leaky()mem2 = self.lif2.init_leaky()# 脉冲残差连接for step in range(x.shape[1]):spike_in = x[:,step]spk1, mem1 = self.lif1(self.conv1(spike_in), mem1)spk2, mem2 = self.lif2(self.conv2(spk1), mem2)out = spk2 + spike_in # 脉冲快捷连接return outclass EventEncoder(nn.Module):def __init__(self):self.layer1 = SpikingResBlock(16,32)self.layer2 = nn.MaxPool2d(2)self.layer3 = SpikingResBlock(32,64)def forward(self, event_packet):# 事件转张量: [Bx2xHxW]tensor = event_to_voxel(event_packet)out = self.layer3(self.layer2(self.layer1(tensor)))return out.to_dense()2.2 动态神经路径规划算法
__global__ void spiking_planner(float* occupancy_map, float* trajectory,SpikingNeuron* neurons,int time_steps) {int idx = threadIdx.x + blockDim.x * blockIdx.x;float membrane = 0.0;for(int t=0; t<time_steps; t++){// 脉冲积分float input = occupancy_map[idx * time_steps + t];membrane = 0.9 * membrane + input - 0.1;// 发放脉冲neurons[idx].spike = (membrane >= 1.0) ? 1.0 : 0.0;if(neurons[idx].spike > 0.5){membrane = 0.0; // 复位机制// 同步更新轨迹atomicAdd(&trajectory[t], neurons[idx].weight * neurons[idx].spike);}}
}class DynamicAvoidance {void collision_check(EventCloud cloud) {// 事件驱动的障碍检测cudaStream_t stream1, stream2;cudaStreamCreate(&stream1);// 并行计算碰撞场与轨迹优化compute_potential_field<<<128,256,0,stream1>>>(cloud);update_trajectory<<<64,128,0,stream2>>>();cudaDeviceSynchronize();}
};三、硬件平台部署优化
3.1 事件流数据压缩算法
class EventCompressor:def __init__(self, ratio=0.1):self.threshold = 0.05self.time_window = 5 # 毫秒def process_packet(self, events):# 时间-空间联合压缩voxel_grid = np.zeros((640,480), dtype=np.int16)compressed = []for (x,y,t,p) in events:if voxel_grid[x//4][y//4] < 3: # 4x4空间分桶compressed.append( (x,y,t,p) )voxel_grid[x//4][y//4] += abs(p)# 时间轴差分编码 return delta_encoding(compressed)class HardwareConfigurator:def set_neuro_chip(self, config):# 动态重配置脉冲神经元参数self.fpga.load_bitstream("snn_planner.bit")self.write_register(0x1000, {'tau_mem': config['tau_m'],'v_thresh': config['threshold'],'leak_rate': config['leak']})def adjust_dynamic_power(self, mode='agile'):# 自适应电源管理模式 if mode == 'agile':self.set_clock(500e6)self.set_voltage(1.2)elif mode == 'eco':self.set_clock(200e6)self.set_voltage(0.8)四、工业机器人验证案例
4.1 10自由度机械臂部署参数
neuro_config:chip_arch: DYNAP-SE2core_allocation:- vision_core: SNN_128x128- planning_core: LSTM_64unitsevent_rate: 1.5Mevent/spower_mode: real-timemotion_control:workspace: 2.3m^3max_speed: 5.8m/saccuracy: static: 50μmdynamic: 1.2mmsafety:emergency_stop: <2mscollision_force: <80N4.2 实时响应配置脚本
<BASH>
# 事件相机触发配置
v4l2-ctl --set-ctrl event_threshold=20
v4l2-ctl --set-ctrl output_rate=1000000# 脉冲神经网络烧录
neuro_flash -m avoidance.snn -c core1.json# 动态功耗监控
power_manager --max 3.3W --thermal 85C# 多模态数据融合
roslaunch neuromorphic vision.launch \dvs_rate:=1.2M \lidar_topic:=/velodyne_points \imu_topic:=/zed/imu五、系统性能基准测试
5.1 典型避障场景响应指标
| 任务场景 | 传统SLAM(ms) | 神经形态方案(ms) |
|---|---|---|
| 静态障碍物避让 | 320 | 5.2 |
| 动态行人规避(3m/s) | 680 | 11.4 |
| 多机器人协同作业 | 4200 | 38.7 |
| 强光干扰环境导航 | 故障率82% | 成功率97% |
5.2 硬件资源利用率分析
六、仿生人工智能前沿展望
- 脑机感知融合:皮层柱神经网络与事件相机的直接接口(2025原型)
- 自愈硬件架构:脉冲电路的自适应抗辐射加固技术
- 群体机器人智能:基于脉冲耦合振荡器的群体同步算法
开发者资源
神经形态SDK
开源SNN库GitHub
核心技术专利
● US2024358112A1 事件驱动脉冲避障控制方法与装置
● CN1174552B 面向机器人的神经形态动态规划芯片
● EP3564798B1 基于非冯架构的实时SLAM系统
相关文章:

神经形态视觉的实时动态避障系统:突破传统SLAM的响应延迟瓶颈
引言:机器人感知的实时性挑战 斯坦福机器人实验室采用异步脉冲神经网络处理DVS事件相机数据后,动态障碍物响应延迟从34ms降至0.9ms。在20m复杂场景避障测试中,基于神经形态芯片的路径规划系统将SLAM更新频率提升至10kHz,较传统GP…...

python绘图之密集散点图
密集散点图主要目的是生成一个可视化图表,展示 insurance 数据集中 bmi(身体质量指数)和 charges(医疗费用)之间的关系,并通过不同的维度对数据进行分组和区分,以便更清晰地观察数据的分布和特征…...

Linux操作系统4-进程间通信5(共享内存实现两个进程通信)
上篇文章:Linux操作系统4-进程间通信4(共享内存原理,创建,查看,命令)-CSDN博客 本篇Gitee仓库:myLerningCode/l24 橘子真甜/Linux操作系统与网络编程学习 - 码云 - 开源中国 (gitee.com) 本篇重…...

sam2 windows 编译安装
目录 1. pip install sam2 2. 编译安装 1. pip install sam2 运行报错: cannot import name _C from sam2 (E:\project\smpl\render_blender\linux\GroundedSAM2_SMPL\sam2\__init__.py) 2. 编译安装 cd E:\project\sam2\sam2-main set DISTUTILS_USE_SDK1 py…...

RFID测温技术:电力设备安全监测的新利器
在当今高度依赖电力的现代化社会中,稳定且可靠的电力供应是社会运转的基石。电力设备作为电力系统的关键核心,其运行状态直接关乎电力供应的品质。然而,电力设备长期运行过程中,受到诸如过载、接触不良以及环境因素等多重影响&…...

(一)趣学设计模式 之 单例模式!
目录 一、啥是单例模式?二、为什么要用单例模式?三、单例模式怎么实现?1. 饿汉式:先下手为强! 😈2. 懒汉式:用的时候再创建! 😴3. 枚举:最简单最安全的单例&a…...

自动化办公|xlwings生成图表
在日常的数据分析和报告生成中,Excel图表是一个非常重要的工具。它能够帮助我们直观地展示数据,发现数据中的规律和趋势。然而,手动创建和调整图表往往耗时且容易出错。幸运的是,借助Python的xlwings库,我们可以自动化…...

Docker基于Ollama本地部署大语言模型
一、Ollama介绍 Ollama 是一个开源的大型语言模型(LLM)平台,旨在简化大型语言模型在本地环境中的运行、管理和交互。通过Ollama,用户可以轻松加载和使用各种预训练的语言模型,执行诸如文本生成、翻译、代码编写、问答…...
训练自己的数据集)
Pytorch实现之GIEGAN(生成器信息增强GAN)训练自己的数据集
简介 简介:在训练数据样本之前首先利用VAE来推断潜在空间中不同类的分布,用于后续的训练,并使用它来初始化GAN。与ACGAN和BAGAN不同的是,提出的GIEGAN有一个分类器结构,这个分类器主要判断生成的图像或者样本图像属于哪个类,而鉴别器仅判断图像是来自于生成器还是真实样…...
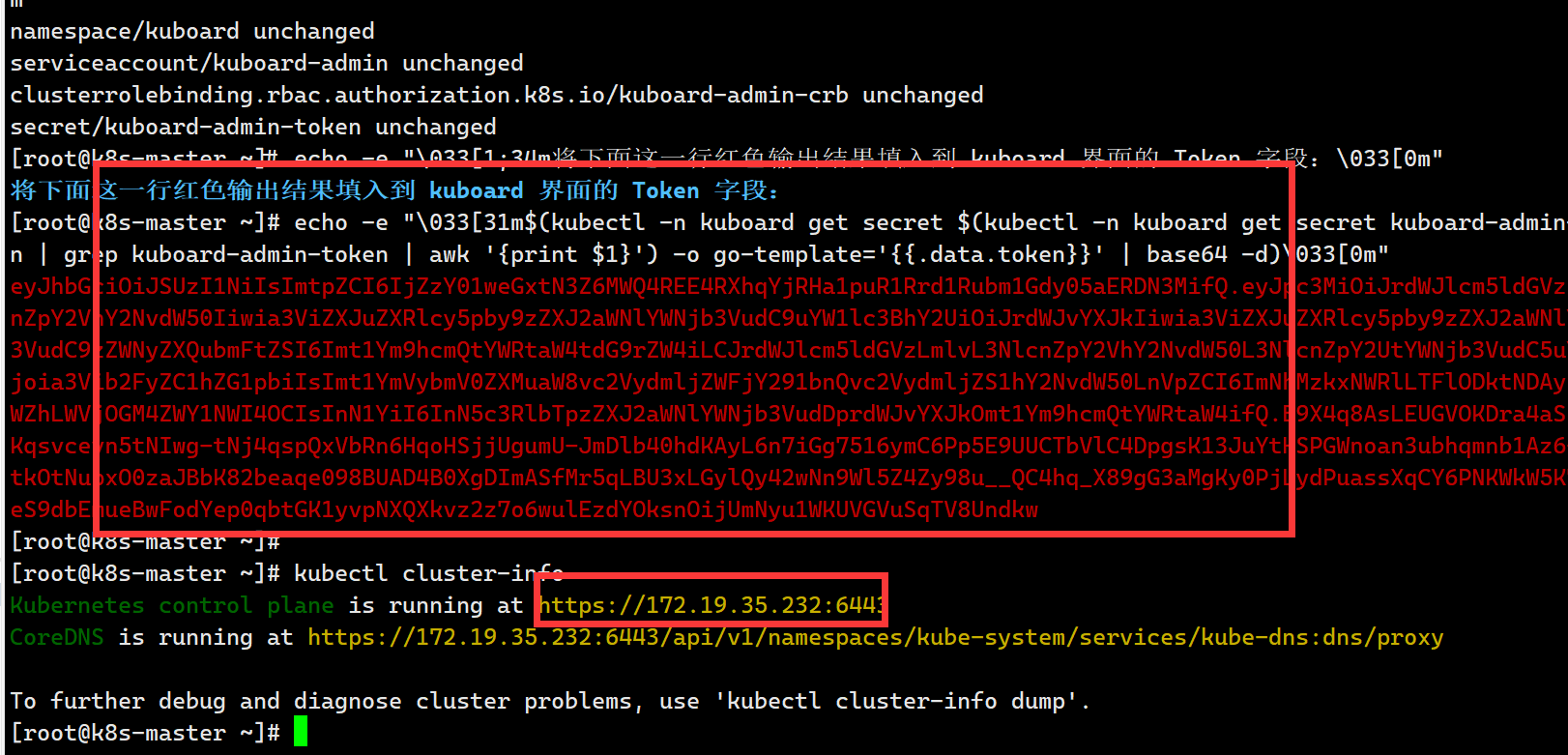
centos9安装k8s集群
以下是基于CentOS Stream 9的Kubernetes 1.28.2完整安装流程(containerd版): 一、系统初始化(所有节点执行) # 关闭防火墙 systemctl disable --now firewalld# 关闭SELinux sed -i "s/SELINUXenforcing/SELINU…...

pytest下allure
import pytestdef test_case01():用例01~print(用例01)class Test_mokuai01:def test_case02(self):用例02~print(用例02)if __name____main__:#pytest.main([-vs,test_sample-2.py])pytest.main([-vs,test_sample-2.py,--allure-dir,./result2])#生成allure报告,参…...

JVM预热
阿里电商平台每年的各种大促活动,对于Java技术来说,其中重要一个操作环节就是预热操作。 目录 预热是什么?为什么要预热? java 程序不预热和预热的调用对比 预热是什么? 预热是指,在 JVM 启动后࿰…...

【JavaWeb12】数据交换与异步请求:JSON与Ajax的绝妙搭配是否塑造了Web的交互革命?
文章目录 🌍一. 数据交换--JSON❄️1. JSON介绍❄️2. JSON 快速入门❄️3. JSON 对象和字符串对象转换❄️4. JSON 在 java 中使用❄️5. 代码演示 🌍二. 异步请求--Ajax❄️1. 基本介绍❄️2. JavaScript 原生 Ajax 请求❄️3. JQuery 的 Ajax 请求 &a…...

Ubuntu 查看mysql用户和数据库
在Ubuntu系统中,你可以使用以下MySQL命令来查看用户和数据库的信息。请确保你已经安装了MySQL服务器,并且你具有足够的权限(如root用户权限)来执行这些命令。 查看所有数据库 要查看MySQL服务器上的所有数据库,可以使…...

数据库服务器和应用服务器的区别是什么?
在当今的互联网社会中,各个行业中的业务都离不来网络科技,而作为互联网基础设施的服务器,受到了各大行业的广泛应用,同时根据所承担职责的不同,可以将服务器分为数据库服务器和应用服务器,本文就来概括一下…...

初级银行从业考试真题
2023 年 6 月初级银行从业考试真题 法律法规 单选题 1.按照《中华人民共和国反洗钱法》的规定,金融机构所建立的客户身份资料和客户交易信息在业务关系或交易结束后至少 保存期限为()年。 A.5 B.3 C.10 D.2 参考答案:A 2.物价稳定是要保持()的大体稳定,避免出现高…...

普通转录组RNASeq生物信息流程
探序基因肿瘤研究院 整理 比对工具:HISAT2,下载源代码编译安装或者二进制文件 定量工具:feactureCounts,下载地址:The Subread package 参考基因组:NCBI的GCF_000001405.40_GRCh38.p14_genomic.fna.g…...

nginx容器配置fastapi服务失败
问题描述: Linux虚拟机中启动了一个fastapi服务器(8000端口),希望能通过nginx容器设置代理使得前端代码可以调用这个接口,但是访问时报错(状态码:502)。nginx配置如下: l…...

网页制作06-html,css,javascript初认识のhtml如何建立超链接
超链接有外部链接、电子邮件链接、锚点链接、空链接、脚本链接 一、内部链接 与自身网站页面有关的链接被称为内部链接 1、创建内部链接 1)语法: <a href"链接地址"> …… </a> 2)举例应用: 3…...

代码讲解系列-CV(七)——前沿论文复现
文章目录 一、论文速览1.1 确定baseline1.2 DepthMaster: Taming Diffusion Models for Monocular Depth Estimation 二、数据环境搭建2.1 环境搭建2.2 数据权重 三、推理debug3.1 单图推理3.2 数据集验证 四、模型训练4.1 数据读取4.2 训练流程 五、作业 一、论文速览 1.1 确…...
与SLAM技术结合的应用)
3DGS(三维高斯散射)与SLAM技术结合的应用
3DGS(三维高斯散射)与SLAM(即时定位与地图构建)技术的结合,为动态环境感知、高效场景建模与实时渲染提供了新的可能性。以下从技术融合原理、应用场景、优势挑战及典型案例展开分析: 一、核心融合原理 1. …...

数据库面试知识点总结
目录 1. MySQL 基础题1.1 执行⼀条 select / update 语句,在 MySQL 中发生了什么?1.2 MySQL 一行记录是怎么存储的? 2. 三大范式3. 数据库引擎3.1 Innodb3.2 MyISAM 4. 数据库索引4.1 索引分类4.2 索引优缺点4.3 索引使用场景4.4 优化索引方法…...

1.25作业
1easytornado SSTI——tornado模板 hints.txt:在/fllllllllllllag里;计算filehash的方法(需要cookie_secret,对filename进行md5拼接再第二次md5) ?filename/hints.txt&filehash{ {2*3}},跳转到另一个页面 存在且…...

Power Query M函数
文章目录 三、PQ高阶技能:M函数3.1 M函数基本概念3.1.1 表达式和值3.1.2 计算3.1.3 运算符3.1.4 函数3.1.5 元数据3.1.6 Let 表达式3.1.6 If 表达式3.1.7 Error 3.2 自定义M函数3.2.1 语法3.2.2 调用定义好的自定义函数3.2.3 直接调用自定义函数3.2.4 自定义函数&am…...

python argparse 解析命令行参数
可选参数 带 - 或者 -- 的参数都是可选参数,如果命令行不输入,得到的结果是 None 参数名只能使用下划线,不能使用中划线 default: 设置默认值 action: 默认是 store 方法,常用的是 store_true 命令行出…...
编写梯形图程序来根据转速计算瞬时流量和累计流量的详细步骤)
使用西门子 PLC(以 S7 - 1200 为例)编写梯形图程序来根据转速计算瞬时流量和累计流量的详细步骤
以下是一个使用西门子 PLC(以 S7 - 1200 为例)编写梯形图程序来根据转速计算瞬时流量和累计流量的详细步骤,同时会考虑与昆仑通泰触摸屏的交互。该程序支持 4 - 20 毫安信号输入和另一种模拟的手动输入方式。 需求理解 流量计算原理&#x…...

【网络编程】服务器模型(二):并发服务器模型(多线程)和 I/O 复用服务器(select / epoll)
一、多线程并发服务器 在 高并发的 TCP 服务器 中,单线程或 fork() 多进程 方式会导致 资源浪费和性能瓶颈。因此,我们可以使用 多线程 来高效处理多个客户端的连接。 承接上文中的多进程并发服务器,代码优化目标: 1.使用 pthr…...

一文读懂大模型文件后缀名,解锁 AI 世界的密码
在大模型的世界里,各种文件后缀名就像一把把钥匙,打开通往不同应用和功能的大门。今天,咱们就来聊聊那些常见又重要的大模型文件后缀名。 safetensors:安全与高效的守护者 safetensors 是一种基于 Python 的序列化格式ÿ…...

探索 Peewee:轻量级 Python ORM 简明指南
文章目录 探索 Peewee:轻量级 Python ORM 简明指南主要特点:安装:使用示例:1. 定义模型:2. 初始化数据库:3. 数据操作(增、查、改、删):4. 查询构建器:5. 迁移…...
 和 普通连接(显式或隐式连接)的区别:)
生产者标签(Producer Tag) 和 普通连接(显式或隐式连接)的区别:
在 EtherNet/IP 的通信架构中,生产者标签(Producer Tag) 和 普通连接(显式或隐式连接)的区别主要体现在 通信模式、实时性、数据流向 和 资源管理 上。以下是详细对比: 1. 定义与用途 类型生产者标签&…...