视觉图像坐标转换
1. 透镜成像
相机的镜头系统将三维场景中的光线聚焦到一个平面(即传感器)。这个过程可以用小孔成像模型来近似描述,尽管实际相机使用复杂的透镜系统来减少畸变和提高成像质量。
小孔成像模型: 假设有一个理想的小孔,光线通过小孔后在对面形成倒立的实像。

在小孔成像模型中,物体到小孔的距离 Z Z Z、焦距 f f f(小孔到成像平面的距离)、物体的实际尺寸 Y Y Y 和 X X X 以及物体在成像平面上的投影尺寸 y y y 和 x x x 之间的关系如下:
Z f = Y y = X x \frac{Z}{f} = \frac{Y}{y} = \frac{X}{x} fZ=yY=xX
其中,
- Z Z Z 是物体到小孔的距离。
- f f f 是焦距(小孔到成像平面的距离)。
- Y Y Y 和 X X X 是物体的实际尺寸。
- y y y 和 x x x 是物体在成像平面上的投影尺寸
这个模型假设有一个理想的小孔,光线通过小孔后在对面形成倒立的实像。虽然现实中没有完全理想的小孔,但这个模型有助于理解基本原理。
2. 相机内参数
内参数描述了相机的内部几何特性,包括焦距、主点位置、像素比例等。这些参数通常通过相机标定过程获得,并用于将三维空间中的点投影到二维图像平面上。

三种坐标系的变换

2.1 主要内参数
-
焦距(Focal Length):
- 通常用 f x f_x fx 和 f y f_y fy 表示,分别对应X轴和Y轴方向上的焦距。
- 焦距决定了相机的视角和放大倍数。
-
主点(Principal Point):
- 通常用 c x c_x cx 和 c y c_y cy 表示,表示光轴与成像平面的交点,即图像中心的像素坐标。
-
畸变系数(Distortion Coefficients):
- 包括径向畸变(Radial Distortion)和切向畸变(Tangential Distortion)系数。
- 这些系数用于校正镜头引起的图像失真。
2.2 内参数矩阵
内参数通常以一个3x3的矩阵 K K K 表示:
K = [ f x 0 c x 0 f y c y 0 0 1 ] K = \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix} K= fx000fy0cxcy1
其中:
- f x f_x fx 和 f y f_y fy 是焦距(以像素为单位)。
- c x c_x cx 和 c y c_y cy 是主点坐标(通常是图像中心)。
2.3 作用
- 投影变换:将三维空间中的点投影到二维图像平面上。
- 校正畸变:利用畸变系数校正图像中的失真现象,提高图像质量。
3. 外参数
外参数(Extrinsic Parameters)描述了相机相对于某个固定的世界坐标系的位置和姿态,包括旋转矩阵 R R R 和平移向量 t t t。 获取这些参数通常需要通过特定的方法或技术进行标定或估计。以下是几种常见的获取外参数的方法:
3.1 相机标定(Camera Calibration)
相机标定不仅用于获取内参数,还可以同时获得外参数。常用的方法之一是使用已知几何结构的标定板(如棋盘格),通过多个视角拍摄标定板图像,然后利用这些图像来计算相机的内外参数。
使用OpenCV进行相机标定
OpenCV 提供了一套完整的工具来进行相机标定,可以同时获取内参数和外参数。以下是一个简化的步骤说明:
- 准备标定板:使用一个已知尺寸的棋盘格作为标定板。
- 采集图像:从不同角度拍摄多张包含标定板的图像。
- 角点检测:在每张图像中找到棋盘格的角点位置。
- 标定过程:使用这些角点信息来计算相机的内外参数。
import cv2
import numpy as npdef calibrate_camera(images, pattern_size=(9, 6)):"""Calibrate the camera using a set of images with a known chessboard pattern.Parameters:- images: List of image paths containing the chessboard pattern.- pattern_size: Tuple (rows, cols) representing the number of inner corners per a chessboard row and column.Returns:- Intrinsic matrix K, distortion coefficients, rotation vectors, and translation vectors."""# Prepare object points, like (0,0,0), (1,0,0), (2,0,0) ....,(6,5,0)objp = np.zeros((pattern_size[0]*pattern_size[1], 3), np.float32)objp[:,:2] = np.mgrid[0:pattern_size[0], 0:pattern_size[1]].T.reshape(-1,2)# Arrays to store object points and image points from all the images.objpoints = [] # 3d point in real world spaceimgpoints = [] # 2d points in image plane.for fname in images:img = cv2.imread(fname)gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# Find the chess board cornersret, corners = cv2.findChessboardCorners(gray, pattern_size, None)# If found, add object points, image points (after refining them)if ret == True:objpoints.append(objp)corners2 = cv2.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria)imgpoints.append(corners2)# Perform camera calibrationret, K, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)return K, dist, rvecs, tvecs# Example usage
if __name__ == "__main__":# Camera calibration using chessboard imagesimages = ["image1.jpg", "image2.jpg", "image3.jpg"] # Replace with actual image pathscriteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)K, dist, rvecs, tvecs = calibrate_camera(images)print("Intrinsic matrix K:\n", K)print("Distortion coefficients:", dist)print("Rotation vectors:", rvecs)print("Translation vectors:", tvecs)
3.2 主要外参数
3.2.1旋转矩阵(Rotation Matrix)
- 旋转矩阵:通常用 $ R $ 表示,是一个3x3的正交矩阵,描述了相机相对于世界坐标系的旋转角度。
3.2.2平移向量(Translation Vector)
- 平移向量:通常用 $ t $ 表示,是一个3x1的向量,描述了相机相对于世界坐标系的平移距离。
3.3 外参数矩阵
外参数通常以一个4x4的齐次变换矩阵 T T T 表示:
T = [ R t 0 T 1 ] T = \begin{bmatrix} R & t \\ 0^T & 1 \end{bmatrix} T=[R0Tt1]
其中:
- R R R 是旋转矩阵。
- $t $ 是平移向量。
- 0 T 0^T 0T 是一个1x3的零向量。
3.3 作用
- 坐标变换:将三维世界坐标系中的点转换到相机坐标系中。
- 姿态估计:确定相机在世界坐标系中的位置和方向,常用于SLAM(同步定位与地图构建)、AR(增强现实)等应用。
相关文章:
视觉图像坐标转换
1. 透镜成像 相机的镜头系统将三维场景中的光线聚焦到一个平面(即传感器)。这个过程可以用小孔成像模型来近似描述,尽管实际相机使用复杂的透镜系统来减少畸变和提高成像质量。 小孔成像模型: 假设有一个理想的小孔,…...

汽车电子电控软件开发中因复杂度提升导致的架构恶化问题
针对汽车电子电控软件开发中因复杂度提升导致的架构恶化问题,建议从以下方向进行架构优化和开发流程升级,以提升灵活性、可维护性和扩展性: 一、架构设计与模块化优化 分层架构与模块解耦 采用AUTOSAR标准的分层架构(应用层、运行…...

2024年第十五届蓝桥杯大赛软件赛省赛Python大学A组真题解析《更新中》
文章目录 试题A: 拼正方形(本题总分:5 分)解析答案试题B: 召唤数学精灵(本题总分:5 分)解析答案试题C: 数字诗意解析答案试题D:回文数组试题A: 拼正方形(本题总分:5 分) 【问题描述】 小蓝正在玩拼图游戏,他有7385137888721 个2 2 的方块和10470245 个1 1 的方块,他需…...

脚本无法获取响应主体(原因:CORS Missing Allow Credentials)
背景: 前端的端口号8080,后端8000。需在前端向后端传一个参数,让后端访问数据库去检测此参数是否出现过。涉及跨域请求,一直有这个bug是404文件找不到。 在修改过程当中不小心删除了一段代码,出现了这个bug࿰…...

leetcode第39题组合总和
原题出于leetcode第39题https://leetcode.cn/problems/combination-sum/description/题目如下: 给你一个 无重复元素 的整数数组 candidates 和一个目标整数 target ,找出 candidates 中可以使数字和为目标数 target 的 所有 不同组合 ,并以…...

在 macOS 系统上安装 kubectl
在 macOS 系统上安装 kubectl 官网:https://kubernetes.io/zh-cn/docs/tasks/tools/install-kubectl-macos/ 用 Homebrew 在 macOS 系统上安装 如果你是 macOS 系统,且用的是 Homebrew 包管理工具, 则可以用 Homebrew 安装 kubectl。 运行…...

SQLark 数据迁移|断点续迁已上线(Oracle-达梦)
数据迁移是 SQLark 最受企业和个人用户欢迎的功能之一,截止目前已帮助政府、金融、能源、通信等 50 家单位完成从 Oracle、MySQL 到达梦的全量迁移,自动化迁移成功率达 96% 以上。 在 Oracle 到达梦数据库迁移过程中,SQLark V3.3 新增 断点续…...

Element Plus中el-tree点击的节点字体变色加粗
el-tree标签设置 <el-tree class"tree":data"treeData":default-expand-all"true":highlight-current"true"node-click"onTreeNodeClick"><!-- 自定义节点内容,点击的节点字体变色加粗 --><!-- 动…...

vmware安装firepower ftd和fmc
在vmware虚拟机中安装cisco firepower下一代防火墙firepower threat defence(ftd)和管理中心firepower management center(fmc)。 由于没有cisco官网下载账号,无法下载其中镜像。使用eveng模拟器中的ftd和fmc虚拟镜像…...

计算机毕业设计SpringBoot+Vue.js医院资源管理系统(源码+文档+PPT+讲解)
温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片! 温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片! 温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片! 作者简介:Java领…...

[含文档+PPT+源码等]精品基于Python实现的微信小程序的乡村医疗咨询系统
基于Python实现的微信小程序的乡村医疗咨询系统背景,可以从以下几个方面进行阐述: 一、社会背景 医疗资源分布不均:在我国,城乡医疗资源分布不均是一个长期存在的问题。乡村地区由于地理位置偏远、经济条件有限,往往…...

Python实现GO鹅优化算法优化BP神经网络回归模型项目实战
说明:这是一个机器学习实战项目(附带数据代码文档视频讲解),如需数据代码文档视频讲解可以直接到文章最后关注获取。 1.项目背景 传统BP神经网络的局限性:BP(Back Propagation)神经网络作为一种…...
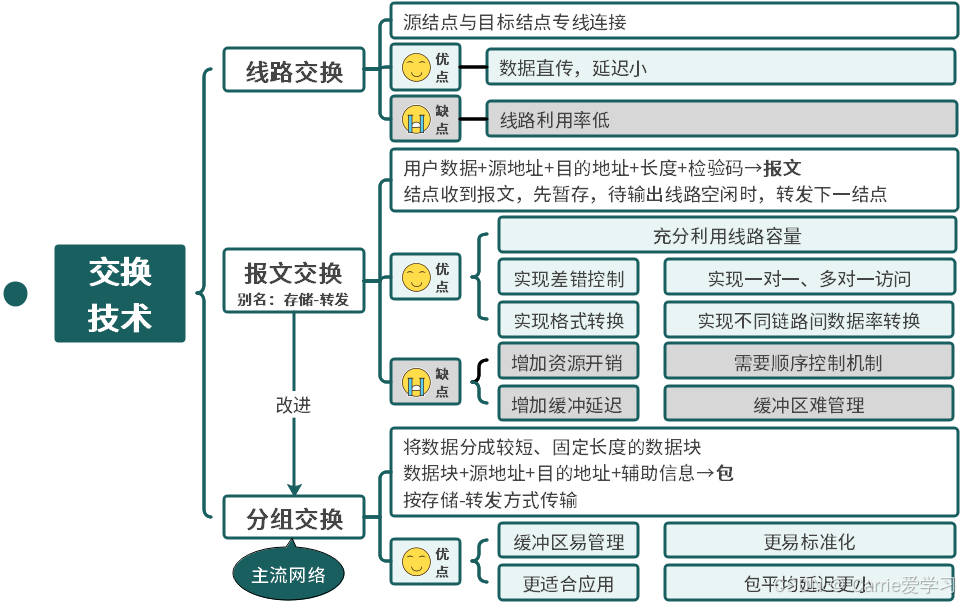
7.1.2 计算机网络的分类
文章目录 分布范围交换方式 分布范围 计算机网络按照分布范围可分为局域网、广域网、城域网。局域网的范围在10m~1km,例如校园网,网速高,主要用于共享网络资源,拓扑结构简单,约束少。广域网的范围在100km,例…...

千峰React:Hooks(上)
什么是Hooks ref引用值 普通变量的改变一般是不好触发函数组件的渲染的,如果想让一般的数据也可以得到状态的保存,可以使用ref import { useState ,useRef} from reactfunction App() {const [count, setCount] useState(0)let num useRef(0)const h…...

设置同一个局域网内远程桌面Ubuntu
1、安装xrdp: 打开终端,运行以下命令来安装xrdp: sudo apt update sudo apt install xrdp 2、启动 XRDP 并设置开机自启 sudo systemctl start xrdp sudo systemctl enable xrdp 3、验证 XRDP 运行状态 sudo systemctl status xrdp 如果显示 active (ru…...

深入 Python:变量与数据类型的奥秘
在 Python 编程的世界里,变量和数据类型是构建程序大厦的基石。它们看似简单,却蕴含着无尽的奥秘和强大的功能。今天,就让我们一起深入探索 Python 中变量与数据类型的奇妙世界。 常量和表达式:数学世界的 Python 映射 在 Pytho…...

LeetCode 718 - 最长重复子数组
LeetCode 718 - 最长重复子数组 是一个典型的数组和字符串问题,适合考察动态规划、滑动窗口和二分查找等多种编程能力。掌握其多种解法及变体能够有效提高处理字符串和数组算法的能力。 题目描述 输入: 两个整数数组 nums1 和 nums2。输出: 两个数组中存在的最长的…...

什么是预训练语言模型下游任务?
问题:Word2Vec模型是预训练模型吗? 由于训练的特性,word2Vec模型一定是与训练模型。给定一个词先使用独热编码然后使用预训练好的Q矩阵得到这个词的词向量。这里指的是词向量本身就是预训练的语言模型。 什么是下游任务? 在自然…...

jvm内存模型,类加载机制,GC算法,垃圾回收器,jvm线上调优等常见的面试题及答案
JVM内存模型 JVM内存模型包括哪些区域 答案:JVM内存模型主要包括以下区域: 程序计数器:是一块较小的内存空间,它可以看作是当前线程所执行的字节码的行号指示器,用于记录正在执行的虚拟机字节码指令的地址。Java虚拟机…...

[Windows] 免费电脑控制手机软件 极限投屏_正式版_3.0.1 (QtScrcpy作者开发)
[Windows] 极限投屏_正式版 链接:https://pan.xunlei.com/s/VOKJf8Z1u5z-cHcTsRpSd89tA1?pwdu5ub# 新增功能(Future): 支持安卓14(Supports Android 14)提高投屏成功率(Improve the success rate of mirror)加快投屏速度(Accelerate screen mirrorin…...

C++初阶—list类
第一章:list的介绍及使用 1.1 list的介绍 list是可以在常数范围内在任意位置进行插入和删除的序列式容器,并且该容器可以前后双向迭代。list的底层是双向链表结构,双向链表中每个元素存储在互不相关的独立节点中,在节点中通过指…...

【子网掩码计算器:Python + Tkinter 实现】
子网掩码计算器:Python Tkinter 实现 引言代码功能概述代码实现思路1. 界面设计2. 功能实现3. 事件处理 子网掩码计算器实现步骤1. 导入必要的库2. 定义主窗口类 SubnetCalculatorApp3. 创建菜单栏4. 创建界面组件5. 判断 IP 地址类别6. 计算子网信息7. 其他功能函…...

入门基础项目(SpringBoot+Vue)
文章目录 1. css布局相关2. JS3. Vue 脚手架搭建4. ElementUI4.1 引入ElementUI4.2 首页4.2.1 整体框架4.2.2 Aside-logo4.2.3 Aside-菜单4.2.4 Header-左侧4.2.5 Header-右侧4.2.6 iconfont 自定义图标4.2.7 完整代码 4.3 封装前后端交互工具 axios4.3.1 安装 axios4.3.2 /src…...

Nginx+PHP+MYSQL-Ubuntu在线安装
在 Ubuntu 上配置 Nginx、PHP 和 MySQL 的步骤如下: 1. 更新系统包 首先,确保系统包是最新的: sudo apt update sudo apt upgrade2. 安装 Nginx 安装 Nginx: sudo apt install nginx启动并启用 Nginx 服务: sudo…...

车载以太网-基于linux的ICMP协议
对于车载以太网-ICMP的技术要求: /** ICMP报文格式解析* -----------------* ICMP协议用于网络诊断和错误报告,常见应用包括Ping测试。* ICMP报文结构包括:IP头部、ICMP头部和ICMP数据部分。* 下面详细介绍每个部分的结构、字段的作用以及如何解析它们。* * ICMP头部结构:*…...

虚拟机快照与linux的目录结构
虚拟机快照是对虚拟机某一时刻状态的完整捕获,包括内存、磁盘、配置及虚拟硬件状态等,保存为独立文件。 其作用主要有数据备份恢复、方便系统测试实验、用于灾难恢复以及数据对比分析。具有快速创建和恢复、占用空间小、可多个快照并存的特点。在管理维…...

Unity小功能实现:鼠标点击移动物体
1、功能描述 当玩家点击鼠标时,场景中的物体会移动到鼠标点击的位置。这个功能可以用于控制角色移动、放置物体等场景。 2、实现步骤 创建Unity项目:首先,打开Unity并创建一个新的3D项目。 添加3D物体:在场景中创建一个3D物体&am…...

算法题笔记(自用)——Python
目录 一. 进制&位运算&ASCAII 二. format格式化输出 1. 基本用法 2. 位置参数 3. 格式化数字 4. 对齐和填充 5. 格式化二进制、八进制、十六进制 6. 格式化百分比 7. 格式化科学计数法 8. 格式化字符串字面量(f-string) 三. 字符串 使…...

爬虫系列之【数据解析之JSON】《三》
目录 前置知识 一、 json.loads():JSON 转 Python 数据 二、json.dump():python数据 转 json 并写入文件 三、json.loads() :json 转 python数据 四、json.load() :json 转 python数据(在文件操作中更方便…...

了解Java集合的概念和体系:Collection<T>、Collections与Stream的使用
学习目标 本文知识是对集合层级的介绍,应用开发中实际使用的是他们的子级,感兴趣的小伙伴或者想深入了解有关Java集合知识的朋友可以选择阅读! Stream的方法使用使用部分代码块内大多有两种实现方式,是为了更好的理解方法底层的代…...