STM32基础教程——定时器
前言
TIM定时器(Timer):STM32的TIM定时器是一种功能强大的外设模块,通过时基单元(包含预分频器、计数器和自动重载寄存器)实现精准定时和计数功能。其核心原理是:内部时钟(CK_INT)或外部时钟经预分频器分频后驱动计数器,当计数器达到自动重载寄存器(ARR)设定的值时触发更新事件,可产生中断或DMA请求,并自动重置计数器重新开始计数。定时器分为高级定时器(TIM1/TIM8)、通用定时器(TIM2-5)和基本定时器(TIM6/TIM7),功能逐级递减:高级定时器支持PWM生成、死区控制、刹车保护等复杂功能;通用定时器支持输入捕获、输出比较及编码器接口;基本定时器仅提供基础定时中断。通过配置预分频值(PSC)和自动重载值(ARR),可灵活设置定时周期(T = (PSC+1)*(ARR+1)/时钟频率),并支持APB总线时钟级联扩展超长定时。此外,TIM还支持主从模式、外部时钟输入及硬件触发DAC等高级应用,广泛用于PWM控制、信号测量、定时任务调度等场景。

技术实现
原理图
无
接线图
定时器定时中断

代码实现
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h" //延时函数
#include "OLED.h"
#include "Timer.h"uint16_t Num = 0;int main(void)
{/*OLED初始化*/OLED_Init();/*定时器初始化*/Timer_Init();/*OLED显示*/OLED_ShowString(1,1,"Num:"); //在第一行第一列开始显示字符串OLED_ShowString(2,1,"Counter:"); //在第二行第一列开始显示字符串while(1){OLED_ShowNum(1,5,Num,5); //显示中断计数变量NumOLED_ShowNum(2,9,TIM_GetCounter(TIM2),5); //显示定时器当前计数器的值}
}
Timer.h
#ifndef __TIMER_H__
#define __TIMER_H__#include "stm32f10x.h" // Device headervoid Timer_Init(void);#endif
Timer.c
#include "Timer.h"extern uint16_t Num;
/**@brief 初始化通用定时器2*@param none *@retval none
**/
void Timer_Init(void)
{/*开启高速总线APB1时钟*/RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);/*选择时钟模式为内部时钟,定时器时钟频率为72MHz*/TIM_InternalClockConfig(TIM2); //系统默认时钟模式为内部时钟模式,不调用该函数并不会影响时钟模式配置为内部时钟模式/*配置时基单元*/TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1; //选择分频模式为不分频TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; //选择计数模式为向上计数/*预分频值与自动重装值计算计数器溢出频率(计数器每秒记多少个数):CK_CNT_OV = 72MHz/(PSC + 1)/(ARR + 1)*/TIM_TimeBaseInitStruct.TIM_Period = 10000-1; //自动重装值(当计数器到达该预设值会将重装寄存器重新加载到计数寄存器中))TIM_TimeBaseInitStruct.TIM_Prescaler = 7200-1; //预分频值TIM_TimeBaseInitStruct.TIM_RepetitionCounter= 0; //重复计数器,只有高级定时器才有,通用定时器用不到,直接赋值为0TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStruct);/***@note:该程序在复位后计数变量的值为1,说明复位后中断函数在初始化后就立刻进入一次。* 原因是:因为预分频器有个缓冲寄存器,我们写的值只有在更新事件时才会起作用,* 为了使我们写的值立刻起作用,在TIM_TimeBaseInt()函数末尾手动生成了一个更新事件,* 使预分频器的值有效。但会使更新事件和更新中断同时发生,更新中断会置更新中断标志位。* //Generate an update event to reload the Prescaler and the Repetition counter* //values immediately * TIMx->EGR = TIM_PSCReloadMode_Immediate; * TIM2_EGR寄存器中的UG位置一,重新初始化计数器,产生一个更新事件,然后会进入中断
**//*清除更新中断标志位*/TIM_ClearFlag(TIM2,TIM_FLAG_Update); //将更新标志位取反,取消更新事件/*使能中断输出控制*/TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);/*配置NVIC*/NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //NVIC优先级分组选择分组2/*NVIC初始化*/NVIC_InitTypeDef NVIC_InitStruct;NVIC_InitStruct.NVIC_IRQChannel = TIM2_IRQn; //中断通道选择TIM2全局中断NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; //启用NVIC通道NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 2;NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStruct);/*启动定时器*/TIM_Cmd(TIM2,ENABLE);
}/**@brief 通用定时器2中断*@param none *@retval none
**/
void TIM2_IRQHandler(void)
{if(TIM_GetITStatus(TIM2,TIM_IT_Update) == SET) //获取TIM中断标志位{Num++;TIM_ClearITPendingBit(TIM2,TIM_IT_Update); //清除中断标志位}
}
OLED.h
#ifndef __OLED_H
#define __OLED_Hvoid OLED_Init(void);
void OLED_Clear(void);
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char);
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String);
void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);
void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length);
void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);
void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);#endif
OLED.c
#include "stm32f10x.h"
#include "OLED_Font.h"/*引脚配置*/
#define OLED_W_SCL(x) GPIO_WriteBit(GPIOB, GPIO_Pin_8, (BitAction)(x)) //可更改引脚配置
#define OLED_W_SDA(x) GPIO_WriteBit(GPIOB, GPIO_Pin_9, (BitAction)(x)) //更改引脚时,改变参数GPIOx,GPIO_Pin_x/*引脚初始化*/
void OLED_I2C_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD; //将引脚的输出模式设置为开漏输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//更改引脚时,改变参数GPIOx,GPIO_Pin_xGPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;GPIO_Init(GPIOB, &GPIO_InitStructure);//更改引脚时,改变参数GPIOx,GPIO_Pin_xGPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_Init(GPIOB, &GPIO_InitStructure);OLED_W_SCL(1);OLED_W_SDA(1);
}/*** @brief I2C开始* @param 无* @retval 无*/
void OLED_I2C_Start(void)
{OLED_W_SDA(1);OLED_W_SCL(1);OLED_W_SDA(0);OLED_W_SCL(0);
}/*** @brief I2C停止* @param 无* @retval 无*/
void OLED_I2C_Stop(void)
{OLED_W_SDA(0);OLED_W_SCL(1);OLED_W_SDA(1);
}/*** @brief I2C发送一个字节* @param Byte 要发送的一个字节* @retval 无*/
void OLED_I2C_SendByte(uint8_t Byte)
{uint8_t i;for (i = 0; i < 8; i++){OLED_W_SDA(!!(Byte & (0x80 >> i)));OLED_W_SCL(1);OLED_W_SCL(0);}OLED_W_SCL(1); //额外的一个时钟,不处理应答信号OLED_W_SCL(0);
}/*** @brief OLED写命令* @param Command 要写入的命令* @retval 无*/
void OLED_WriteCommand(uint8_t Command)
{OLED_I2C_Start();OLED_I2C_SendByte(0x78); //从机地址OLED_I2C_SendByte(0x00); //写命令OLED_I2C_SendByte(Command); OLED_I2C_Stop();
}/*** @brief OLED写数据* @param Data 要写入的数据* @retval 无*/
void OLED_WriteData(uint8_t Data)
{OLED_I2C_Start();OLED_I2C_SendByte(0x78); //从机地址OLED_I2C_SendByte(0x40); //写数据OLED_I2C_SendByte(Data);OLED_I2C_Stop();
}/*** @brief OLED设置光标位置* @param Y 以左上角为原点,向下方向的坐标,范围:0~7* @param X 以左上角为原点,向右方向的坐标,范围:0~127* @retval 无*/
void OLED_SetCursor(uint8_t Y, uint8_t X)
{OLED_WriteCommand(0xB0 | Y); //设置Y位置OLED_WriteCommand(0x10 | ((X & 0xF0) >> 4)); //设置X位置高4位OLED_WriteCommand(0x00 | (X & 0x0F)); //设置X位置低4位
}/*** @brief OLED清屏* @param 无* @retval 无*/
void OLED_Clear(void)
{ uint8_t i, j;for (j = 0; j < 8; j++){OLED_SetCursor(j, 0);for(i = 0; i < 128; i++){OLED_WriteData(0x00);}}
}/*** @brief OLED显示一个字符* @param Line 行位置,范围:1~4* @param Column 列位置,范围:1~16* @param Char 要显示的一个字符,范围:ASCII可见字符* @retval 无*/
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char)
{ uint8_t i;OLED_SetCursor((Line - 1) * 2, (Column - 1) * 8); //设置光标位置在上半部分for (i = 0; i < 8; i++){OLED_WriteData(OLED_F8x16[Char - ' '][i]); //显示上半部分内容}OLED_SetCursor((Line - 1) * 2 + 1, (Column - 1) * 8); //设置光标位置在下半部分for (i = 0; i < 8; i++){OLED_WriteData(OLED_F8x16[Char - ' '][i + 8]); //显示下半部分内容}
}/*** @brief OLED显示字符串* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param String 要显示的字符串,范围:ASCII可见字符* @retval 无*/
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String)
{uint8_t i;for (i = 0; String[i] != '\0'; i++){OLED_ShowChar(Line, Column + i, String[i]);}
}/*** @brief OLED次方函数* @retval 返回值等于X的Y次方*/
uint32_t OLED_Pow(uint32_t X, uint32_t Y)
{uint32_t Result = 1;while (Y--){Result *= X;}return Result;
}/*** @brief OLED显示数字(十进制,正数)* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~4294967295* @param Length 要显示数字的长度,范围:1~10* @retval 无*/
void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{uint8_t i;for (i = 0; i < Length; i++) {OLED_ShowChar(Line, Column + i, Number / OLED_Pow(10, Length - i - 1) % 10 + '0');}
}/*** @brief OLED显示数字(十进制,带符号数)* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:-2147483648~2147483647* @param Length 要显示数字的长度,范围:1~10* @retval 无*/
void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length)
{uint8_t i;uint32_t Number1;if (Number >= 0){OLED_ShowChar(Line, Column, '+');Number1 = Number;}else{OLED_ShowChar(Line, Column, '-');Number1 = -Number;}for (i = 0; i < Length; i++) {OLED_ShowChar(Line, Column + i + 1, Number1 / OLED_Pow(10, Length - i - 1) % 10 + '0');}
}/*** @brief OLED显示数字(十六进制,正数)* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~0xFFFFFFFF* @param Length 要显示数字的长度,范围:1~8* @retval 无*/
void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{uint8_t i, SingleNumber;for (i = 0; i < Length; i++) {SingleNumber = Number / OLED_Pow(16, Length - i - 1) % 16;if (SingleNumber < 10){OLED_ShowChar(Line, Column + i, SingleNumber + '0');}else{OLED_ShowChar(Line, Column + i, SingleNumber - 10 + 'A');}}
}/*** @brief OLED显示数字(二进制,正数)* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~1111 1111 1111 1111* @param Length 要显示数字的长度,范围:1~16* @retval 无*/
void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{uint8_t i;for (i = 0; i < Length; i++) {OLED_ShowChar(Line, Column + i, Number / OLED_Pow(2, Length - i - 1) % 2 + '0');}
}/*** @brief OLED初始化* @param 无* @retval 无*/
void OLED_Init(void)
{uint32_t i, j;for (i = 0; i < 1000; i++) //上电延时{for (j = 0; j < 1000; j++);}OLED_I2C_Init(); //端口初始化OLED_WriteCommand(0xAE); //关闭显示OLED_WriteCommand(0xD5); //设置显示时钟分频比/振荡器频率OLED_WriteCommand(0x80);OLED_WriteCommand(0xA8); //设置多路复用率OLED_WriteCommand(0x3F);OLED_WriteCommand(0xD3); //设置显示偏移OLED_WriteCommand(0x00);OLED_WriteCommand(0x40); //设置显示开始行OLED_WriteCommand(0xA1); //设置左右方向,0xA1正常 0xA0左右反置OLED_WriteCommand(0xC8); //设置上下方向,0xC8正常 0xC0上下反置OLED_WriteCommand(0xDA); //设置COM引脚硬件配置OLED_WriteCommand(0x12);OLED_WriteCommand(0x81); //设置对比度控制OLED_WriteCommand(0xCF);OLED_WriteCommand(0xD9); //设置预充电周期OLED_WriteCommand(0xF1);OLED_WriteCommand(0xDB); //设置VCOMH取消选择级别OLED_WriteCommand(0x30);OLED_WriteCommand(0xA4); //设置整个显示打开/关闭OLED_WriteCommand(0xA6); //设置正常/倒转显示OLED_WriteCommand(0x8D); //设置充电泵OLED_WriteCommand(0x14);OLED_WriteCommand(0xAF); //开启显示OLED_Clear(); //OLED清屏
}
OLED_Front.h
#ifndef __OLED_FONT_H
#define __OLED_FONT_H/*OLED字模库,宽8像素,高16像素*/
const uint8_t OLED_F8x16[][16]=
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,// 00x00,0x00,0x00,0xF8,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x33,0x30,0x00,0x00,0x00,//! 10x00,0x10,0x0C,0x06,0x10,0x0C,0x06,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//" 20x40,0xC0,0x78,0x40,0xC0,0x78,0x40,0x00,0x04,0x3F,0x04,0x04,0x3F,0x04,0x04,0x00,//# 30x00,0x70,0x88,0xFC,0x08,0x30,0x00,0x00,0x00,0x18,0x20,0xFF,0x21,0x1E,0x00,0x00,//$ 40xF0,0x08,0xF0,0x00,0xE0,0x18,0x00,0x00,0x00,0x21,0x1C,0x03,0x1E,0x21,0x1E,0x00,//% 50x00,0xF0,0x08,0x88,0x70,0x00,0x00,0x00,0x1E,0x21,0x23,0x24,0x19,0x27,0x21,0x10,//& 60x10,0x16,0x0E,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//' 70x00,0x00,0x00,0xE0,0x18,0x04,0x02,0x00,0x00,0x00,0x00,0x07,0x18,0x20,0x40,0x00,//( 80x00,0x02,0x04,0x18,0xE0,0x00,0x00,0x00,0x00,0x40,0x20,0x18,0x07,0x00,0x00,0x00,//) 90x40,0x40,0x80,0xF0,0x80,0x40,0x40,0x00,0x02,0x02,0x01,0x0F,0x01,0x02,0x02,0x00,//* 100x00,0x00,0x00,0xF0,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x1F,0x01,0x01,0x01,0x00,//+ 110x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xB0,0x70,0x00,0x00,0x00,0x00,0x00,//, 120x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x01,0x01,0x01,0x01,//- 130x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,0x00,0x00,//. 140x00,0x00,0x00,0x00,0x80,0x60,0x18,0x04,0x00,0x60,0x18,0x06,0x01,0x00,0x00,0x00,/// 150x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x0F,0x10,0x20,0x20,0x10,0x0F,0x00,//0 160x00,0x10,0x10,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//1 170x00,0x70,0x08,0x08,0x08,0x88,0x70,0x00,0x00,0x30,0x28,0x24,0x22,0x21,0x30,0x00,//2 180x00,0x30,0x08,0x88,0x88,0x48,0x30,0x00,0x00,0x18,0x20,0x20,0x20,0x11,0x0E,0x00,//3 190x00,0x00,0xC0,0x20,0x10,0xF8,0x00,0x00,0x00,0x07,0x04,0x24,0x24,0x3F,0x24,0x00,//4 200x00,0xF8,0x08,0x88,0x88,0x08,0x08,0x00,0x00,0x19,0x21,0x20,0x20,0x11,0x0E,0x00,//5 210x00,0xE0,0x10,0x88,0x88,0x18,0x00,0x00,0x00,0x0F,0x11,0x20,0x20,0x11,0x0E,0x00,//6 220x00,0x38,0x08,0x08,0xC8,0x38,0x08,0x00,0x00,0x00,0x00,0x3F,0x00,0x00,0x00,0x00,//7 230x00,0x70,0x88,0x08,0x08,0x88,0x70,0x00,0x00,0x1C,0x22,0x21,0x21,0x22,0x1C,0x00,//8 240x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x00,0x31,0x22,0x22,0x11,0x0F,0x00,//9 250x00,0x00,0x00,0xC0,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,//: 260x00,0x00,0x00,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x60,0x00,0x00,0x00,0x00,//; 270x00,0x00,0x80,0x40,0x20,0x10,0x08,0x00,0x00,0x01,0x02,0x04,0x08,0x10,0x20,0x00,//< 280x40,0x40,0x40,0x40,0x40,0x40,0x40,0x00,0x04,0x04,0x04,0x04,0x04,0x04,0x04,0x00,//= 290x00,0x08,0x10,0x20,0x40,0x80,0x00,0x00,0x00,0x20,0x10,0x08,0x04,0x02,0x01,0x00,//> 300x00,0x70,0x48,0x08,0x08,0x08,0xF0,0x00,0x00,0x00,0x00,0x30,0x36,0x01,0x00,0x00,//? 310xC0,0x30,0xC8,0x28,0xE8,0x10,0xE0,0x00,0x07,0x18,0x27,0x24,0x23,0x14,0x0B,0x00,//@ 320x00,0x00,0xC0,0x38,0xE0,0x00,0x00,0x00,0x20,0x3C,0x23,0x02,0x02,0x27,0x38,0x20,//A 330x08,0xF8,0x88,0x88,0x88,0x70,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x11,0x0E,0x00,//B 340xC0,0x30,0x08,0x08,0x08,0x08,0x38,0x00,0x07,0x18,0x20,0x20,0x20,0x10,0x08,0x00,//C 350x08,0xF8,0x08,0x08,0x08,0x10,0xE0,0x00,0x20,0x3F,0x20,0x20,0x20,0x10,0x0F,0x00,//D 360x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x20,0x23,0x20,0x18,0x00,//E 370x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x00,0x03,0x00,0x00,0x00,//F 380xC0,0x30,0x08,0x08,0x08,0x38,0x00,0x00,0x07,0x18,0x20,0x20,0x22,0x1E,0x02,0x00,//G 390x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,0x20,0x3F,0x21,0x01,0x01,0x21,0x3F,0x20,//H 400x00,0x08,0x08,0xF8,0x08,0x08,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//I 410x00,0x00,0x08,0x08,0xF8,0x08,0x08,0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,0x00,//J 420x08,0xF8,0x88,0xC0,0x28,0x18,0x08,0x00,0x20,0x3F,0x20,0x01,0x26,0x38,0x20,0x00,//K 430x08,0xF8,0x08,0x00,0x00,0x00,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x20,0x30,0x00,//L 440x08,0xF8,0xF8,0x00,0xF8,0xF8,0x08,0x00,0x20,0x3F,0x00,0x3F,0x00,0x3F,0x20,0x00,//M 450x08,0xF8,0x30,0xC0,0x00,0x08,0xF8,0x08,0x20,0x3F,0x20,0x00,0x07,0x18,0x3F,0x00,//N 460xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,0x0F,0x10,0x20,0x20,0x20,0x10,0x0F,0x00,//O 470x08,0xF8,0x08,0x08,0x08,0x08,0xF0,0x00,0x20,0x3F,0x21,0x01,0x01,0x01,0x00,0x00,//P 480xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,0x0F,0x18,0x24,0x24,0x38,0x50,0x4F,0x00,//Q 490x08,0xF8,0x88,0x88,0x88,0x88,0x70,0x00,0x20,0x3F,0x20,0x00,0x03,0x0C,0x30,0x20,//R 500x00,0x70,0x88,0x08,0x08,0x08,0x38,0x00,0x00,0x38,0x20,0x21,0x21,0x22,0x1C,0x00,//S 510x18,0x08,0x08,0xF8,0x08,0x08,0x18,0x00,0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//T 520x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//U 530x08,0x78,0x88,0x00,0x00,0xC8,0x38,0x08,0x00,0x00,0x07,0x38,0x0E,0x01,0x00,0x00,//V 540xF8,0x08,0x00,0xF8,0x00,0x08,0xF8,0x00,0x03,0x3C,0x07,0x00,0x07,0x3C,0x03,0x00,//W 550x08,0x18,0x68,0x80,0x80,0x68,0x18,0x08,0x20,0x30,0x2C,0x03,0x03,0x2C,0x30,0x20,//X 560x08,0x38,0xC8,0x00,0xC8,0x38,0x08,0x00,0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//Y 570x10,0x08,0x08,0x08,0xC8,0x38,0x08,0x00,0x20,0x38,0x26,0x21,0x20,0x20,0x18,0x00,//Z 580x00,0x00,0x00,0xFE,0x02,0x02,0x02,0x00,0x00,0x00,0x00,0x7F,0x40,0x40,0x40,0x00,//[ 590x00,0x0C,0x30,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x06,0x38,0xC0,0x00,//\ 600x00,0x02,0x02,0x02,0xFE,0x00,0x00,0x00,0x00,0x40,0x40,0x40,0x7F,0x00,0x00,0x00,//] 610x00,0x00,0x04,0x02,0x02,0x02,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//^ 620x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,//_ 630x00,0x02,0x02,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//` 640x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x19,0x24,0x22,0x22,0x22,0x3F,0x20,//a 650x08,0xF8,0x00,0x80,0x80,0x00,0x00,0x00,0x00,0x3F,0x11,0x20,0x20,0x11,0x0E,0x00,//b 660x00,0x00,0x00,0x80,0x80,0x80,0x00,0x00,0x00,0x0E,0x11,0x20,0x20,0x20,0x11,0x00,//c 670x00,0x00,0x00,0x80,0x80,0x88,0xF8,0x00,0x00,0x0E,0x11,0x20,0x20,0x10,0x3F,0x20,//d 680x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x1F,0x22,0x22,0x22,0x22,0x13,0x00,//e 690x00,0x80,0x80,0xF0,0x88,0x88,0x88,0x18,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//f 700x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x6B,0x94,0x94,0x94,0x93,0x60,0x00,//g 710x08,0xF8,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//h 720x00,0x80,0x98,0x98,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//i 730x00,0x00,0x00,0x80,0x98,0x98,0x00,0x00,0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,//j 740x08,0xF8,0x00,0x00,0x80,0x80,0x80,0x00,0x20,0x3F,0x24,0x02,0x2D,0x30,0x20,0x00,//k 750x00,0x08,0x08,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//l 760x80,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x20,0x3F,0x20,0x00,0x3F,0x20,0x00,0x3F,//m 770x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//n 780x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//o 790x80,0x80,0x00,0x80,0x80,0x00,0x00,0x00,0x80,0xFF,0xA1,0x20,0x20,0x11,0x0E,0x00,//p 800x00,0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x0E,0x11,0x20,0x20,0xA0,0xFF,0x80,//q 810x80,0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x20,0x20,0x3F,0x21,0x20,0x00,0x01,0x00,//r 820x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x33,0x24,0x24,0x24,0x24,0x19,0x00,//s 830x00,0x80,0x80,0xE0,0x80,0x80,0x00,0x00,0x00,0x00,0x00,0x1F,0x20,0x20,0x00,0x00,//t 840x80,0x80,0x00,0x00,0x00,0x80,0x80,0x00,0x00,0x1F,0x20,0x20,0x20,0x10,0x3F,0x20,//u 850x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,0x00,0x01,0x0E,0x30,0x08,0x06,0x01,0x00,//v 860x80,0x80,0x00,0x80,0x00,0x80,0x80,0x80,0x0F,0x30,0x0C,0x03,0x0C,0x30,0x0F,0x00,//w 870x00,0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x31,0x2E,0x0E,0x31,0x20,0x00,//x 880x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,0x80,0x81,0x8E,0x70,0x18,0x06,0x01,0x00,//y 890x00,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x21,0x30,0x2C,0x22,0x21,0x30,0x00,//z 900x00,0x00,0x00,0x00,0x80,0x7C,0x02,0x02,0x00,0x00,0x00,0x00,0x00,0x3F,0x40,0x40,//{ 910x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,//| 920x00,0x02,0x02,0x7C,0x80,0x00,0x00,0x00,0x00,0x40,0x40,0x3F,0x00,0x00,0x00,0x00,//} 930x00,0x06,0x01,0x01,0x02,0x02,0x04,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//~ 94
};#endif
内容要点
TIMx
通用定时器是一个通过可编程预分频器驱动的16位自动装载计数器构成,适用于多场合,包括测量输入信号的脉冲长度(输入捕获)或产生输出波形(输出比较和PWM).每个定时器完全独立,没有互相共享任何资源,它们可以一起同步操作。
TIMx 主要功能
通用TIMx(TIM2,TIM3,TIM4和TIM5)定时器功能包括:
- 16位向上,向下,向上/向下自动装载计数器
- 16位可编程(可实时修改)预分频器,计数器时钟频率的分频系数为1~65536之间的任意数值
- 4个独立通道:
--输入捕获
--输出比较
--PWM生成(边沿或中间对齐模式)
--单脉冲模式输出
- 使用外部信号控制定时器和定时器互连的同步电路
- 如下事件发生时产生中断/DMA
--更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或内部/外部触发计数)
--触发事件(计数器启动,停止,初始化或者由内部/外部触发计数)
--输入捕获
--输出比较
- 支持针对定位的增量(正交)编码器和霍尔传感器电路
- 触发输入作为外部时钟或按中期的电流管理

定时器初始化
1.时钟设置
/*开启高速总线APB1时钟*/RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
TIM2属于APB1外围设备,应调用函数RCC_APB1PeriphClockCmd()这只APB1时钟。
2.选择计数器时钟
计数器时钟可由下列时钟源提供:
● 内部时钟(CK_INT)
● 外部时钟模式1:外部输入脚(TIx)
● 外部时钟模式2:外部触发输入(ETR)
● 内部触发输入(ITRx):使用一个定时器作为另一个定时器的预分频器,如可以配置一个定时
器Timer1而作为另一个定时器Timer2的预分频器
/*选择时钟模式为内部时钟,定时器时钟频率为72MHz*/TIM_InternalClockConfig(TIM2); //系统默认时钟模式为内部时钟模式,不调用该函数并不会影响时钟模式配置为内部时钟模式调用TIM_InternalClockConfig()函数将TIM2定时器的时钟配置为内部时钟,此时时钟频率为72MHz
3.设置时基单元
时基单元
可编程通用定时器的主要部分是一个16位计数器和与其相关的自动装载寄存器,这个计数器可以向上计数,向下计数或者向上向下双向计数。此计数器时钟由预分频器分频得到。
时基单元包含:
- 计数器寄存器(TIMx_CNT)
- 预分频器寄存器(TIMx_PSC)
- 自动装载寄存器(TIMx_ARR)
/*配置时基单元*/TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1; //选择分频模式为不分频TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; //选择计数模式为向上计数/*预分频值与自动重装值计算计数器溢出频率(计数器每秒记多少个数):CK_CNT_OV = 72MHz/(PSC + 1)/(ARR + 1)*/TIM_TimeBaseInitStruct.TIM_Period = 10000-1; //自动重装值(当计数器到达该预设值会将重装寄存器重新加载到计数寄存器中))TIM_TimeBaseInitStruct.TIM_Prescaler = 7200-1; //预分频值TIM_TimeBaseInitStruct.TIM_RepetitionCounter= 0; //重复计数器,只有高级定时器才有,通用定时器用不到,直接赋值为0TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStruct);将分频模式配置为不分频模式,计数器的计数模式设置为向上计数。然后进行预分频值和自动重装值的的计算。计数器溢出频率(定时器每秒触发中断的次数):CK_CNT_OV = 72MHz/(PSC + 1)/(ARR + 1),这是要求每秒计1个数(每秒触发一次中断),CK_CNT_OV值为1Hz,PSC(预分频器的值)和ARR(自动重装值)分别设置为7200和10000,即记一个数需要100us,计数值到达10000时说明定时器定时到达1S。
(51单片机是一个机器周期(12个时钟周期)计一个数,而STM32是一个时钟周期记一个数) ,通用计数器用不到重复计数器,只有高级计数器才会用到,此处直接赋值为0.
1. 51单片机的计数机制
(1) 机器周期与指令周期
- 时钟周期:51单片机的晶振频率(如12MHz)决定了时钟周期(1/12 μs)。
- 机器周期:
- 51单片机采用冯诺依曼架构,每条指令的执行需要 12个时钟周期(即1个机器周期)。
- 例如:若晶振为12MHz,则1个机器周期 = 1 μs(12个时钟周期)。
- 定时器计数:
- 定时器(如Timer0)默认以机器周期为计数单位,即每过1个机器周期(1 μs)计数一次。
- 例如:设置定时器溢出值为1000时,溢出时间为 1000 × 1 μs = 1秒。
2. STM32的计数机制
(1) 指令周期与定时器时钟
- 时钟周期:STM32采用哈佛架构,每个指令执行仅需 1个时钟周期(相比51的12周期效率更高)。
- 定时器计数时钟(CK_CNT):
- 定时器的计数时钟由**预分频器(PSC)**分频而来,分频公式为:
CK_CNT=系统时钟(如72MHz)/PSC+1
- 每个CK_CNT周期,计数器递增1次(无需等待指令周期)。
- 例如:若PSC=71,则CK_CNT = 72 MHz72=1 MHz7272MHz=1MHz,即每 1 μs 计数一次。
(2) 计数灵活性
- 直接基于时钟分频:
STM32的计数器直接由CK_CNT驱动,无需绑定到指令周期,因此可以实现任意分频比(通过PSC和ARR的灵活配置)。- 高精度计数:
例如:若系统时钟为72MHz,PSC=0(不分频),则CK_CNT=72MHz,计数器每 13.89 ns 递增一次,精度远高于51单片机。
3. 关键对比
特性 51单片机 STM32 架构 冯诺依曼架构(程序与数据共享总线) 哈佛架构(程序与数据独立总线) 指令周期 每条指令需12个时钟周期(1机器周期) 每条指令仅需1个时钟周期 定时器计数单位 机器周期(12时钟周期) 可配置的时钟分频(CK_CNT) 计数灵活性 固定为机器周期的分频(如12分频) 可通过PSC和ARR实现任意分频比 典型定时精度 1 μs(12MHz晶振时) 13.89 ns(72MHz系统时钟,不分频时)
4. 实际应用中的差异
(1) 定时1秒的配置
- 51单片机(12MHz晶振):
- 定时器溢出值 = 1秒 / 1 μs = 1000(无需分频,直接使用机器周期)。
- STM32(72MHz系统时钟):
- 需配置PSC和ARR:
- PSC = 71999 → 分频系数=72000 → CK_CNT = 72 MHz72000=1 kHz7200072MHz=1kHz
- ARR = 999 → 总计数周期 = 1000 → 1秒。
(2) PWM输出
- 51单片机:
- PWM频率受限于机器周期,难以实现高频信号。
- STM32:
- 可通过PSC和ARR灵活配置PWM频率,例如:
- PSC=0(CK_CNT=72MHz) → 高频PWM(如1MHz)。
5. 总结
- 51单片机:定时器基于固定机器周期(12时钟周期),计数灵活性较低,适合简单定时任务。
- STM32:定时器直接基于可编程的时钟分频(CK_CNT),每个时钟周期可计数一次,提供极高的灵活性和精度,适合复杂实时控制场景。
/*清除更新中断标志位*/TIM_ClearFlag(TIM2,TIM_FLAG_Update); //将更新标志位取反,取消更新事件清除中断更新中断标志位,防止上电复位后立即进入中断。
该程序在复位后计数变量的值为1,说明复位后中断函数在初始化后就立刻进入一次。
原因是:因为预分频器有个缓冲寄存器,我们写的值只有在更新事件时才会起作用,
为了使我们写的值立刻起作用,在TIM_TimeBaseInt()函数末尾手动生成了一个更新事件,
使预分频器的值有效。但会使更新事件和更新中断同时发生,更新中断会置更新中断标志位。
* //Generate an update event to reload the Prescaler and the Repetition counter
* //values immediately
* TIMx->EGR = TIM_PSCReloadMode_Immediate;
TIM2_EGR寄存器中的UG位置一,重新初始化计数器,产生一个更新事件,然后会进入中断
4.输出中断控制
/*使能中断输出控制*/TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);选择TIM2外设,启用TIM更新中断源。
5.配置NVIC
/*配置NVIC*/NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //NVIC优先级分组选择分组2/*NVIC初始化*/NVIC_InitTypeDef NVIC_InitStruct;NVIC_InitStruct.NVIC_IRQChannel = TIM2_IRQn; //中断通道选择TIM2全局中断NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; //启用NVIC通道NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 2;NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStruct);
选择NVIC优先级分组为NVIC_PriorityGroup_2,将TIM2全局中断设置为中断通道,抢占优先级设置为2,响应优先级设置为1(在合法范围内灵活设置即可)
6.启用定时器
/*启动定时器*/TIM_Cmd(TIM2,ENABLE);调用TIM_Cmd()函数启用指定的TIMx外设。
定时器中断
**@brief 通用定时器2中断*@param none *@retval none
**/
void TIM2_IRQHandler(void)
{if(TIM_GetITStatus(TIM2,TIM_IT_Update) == SET) //获取TIM中断标志位{Num++;TIM_ClearITPendingBit(TIM2,TIM_IT_Update); //清除中断标志位}
}TIM2定时器中断函数名在启动文件中的定义为TIM2_IRQHandler,此处应严格按照启动文件中的定义。TIM2 1s发生一次中断,进入中断函数后检测TIM2中断标志位,若中断标志位被置1则执行中断任务,计数变量加1,然后清除中断标志位,避免ISR无限循环。
中断发生需要满足两个条件:
- 中断使能:对应中断的使能位(如USART_CR1中的RXNEIE)被置1。
- 中断标志位置位:硬件事件发生后,对应的中断标志位(如USART_SR中的RXNE或ORE)被自动置1。
即使中断使能已打开,只有当标志位被置位时,才会触发中断。因此,进入ISR后必须通过检测标志位来确认具体是哪个事件触发了中断。
数据显示
OLED_ShowString(1,1,"Num:"); //在第一行第一列开始显示字符串OLED_ShowString(2,1,"Counter:"); //在第二行第一列开始显示字符串while(1){OLED_ShowNum(1,5,Num,5); //显示中断计数变量NumOLED_ShowNum(2,9,TIM_GetCounter(TIM2),5); //显示定时器当前计数器的值}在OLED第一行显示计数变量Num的值,即x秒。第二行显示计数器寄存器中的值即x*10us,该数据使用TIM_GetCounter函数获取。
实验结果

相关文章:
STM32基础教程——定时器
前言 TIM定时器(Timer):STM32的TIM定时器是一种功能强大的外设模块,通过时基单元(包含预分频器、计数器和自动重载寄存器)实现精准定时和计数功能。其核心原理是:内部时钟(CK_INT)或…...
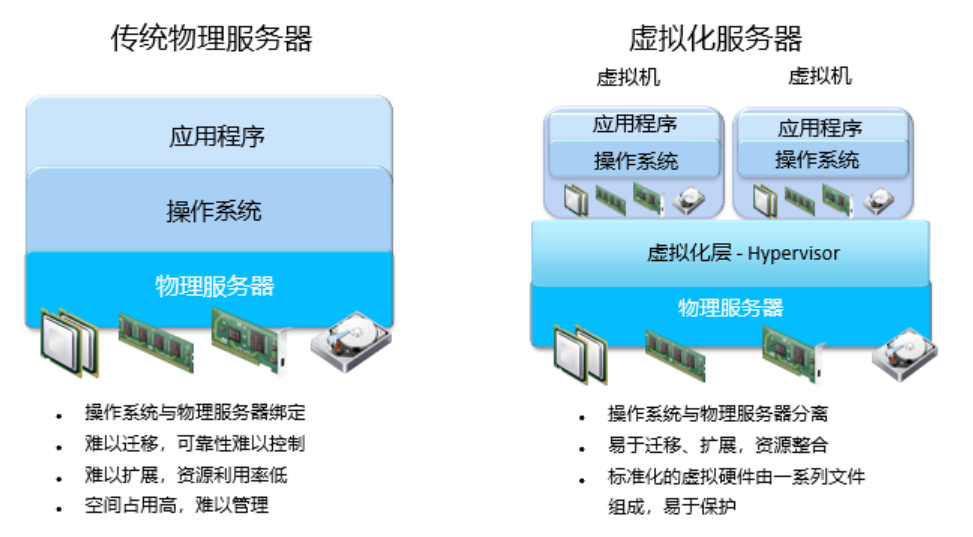
深入分析和讲解虚拟化技术原理
随着云计算和大数据技术的飞速发展,虚拟化技术应运而生,成为数据中心和IT基础设施的重要组成部分。本文将深入分析虚拟化的基本原理、主要类型以及在实际应用中的意义。 一、虚拟化技术的定义 虚拟化技术是通过软件将物理硬件资源抽象成虚拟资源的技术&…...

HarmonyOS Next~鸿蒙图形开发技术解析:AREngine与ArkGraphics 2D的核心能力与应用实践
HarmonyOS Next~鸿蒙图形开发技术解析:AREngine与ArkGraphics 2D的核心能力与应用实践 鸿蒙操作系统(HarmonyOS)在图形开发领域持续创新,其核心图形类Kit——**AREngine(增强现实引擎服务)与Ar…...

Can通信流程
下面给出一个更详细的 CAN 发送报文的程序流程说明,结合 HAL 库的使用及代码示例,帮助你了解每一步的具体操作和内部原理。 一、系统与外设初始化 1.1 HAL 库初始化 在 main() 函数开头,首先调用 HAL 库初始化函数: HAL_Init()…...

小白闯AI:Llama模型Lora中文微调实战
文章目录 0、缘起一、如何对大模型进行微调二、模型微调实战0、准备环境1、准备数据2、模型微调第一步、获取基础的预训练模型第二步:预处理数据集第三步:进行模型微调第四步:将微调后的模型保存到本地4、模型验证5、Ollama集成部署6、结果测试三、使用总结AI是什么?他应该…...

rip 协议详细介绍
以下是关于 RIP(Routing Information Protocol,路由信息协议) 的详细介绍,涵盖其工作原理、版本演进、配置方法、优缺点及实际应用场景。 1. RIP 协议概述 类型:动态路由协议,基于距离矢量算法(…...

同旺科技USB to SPI 适配器 ---- 指令之间延时功能
所需设备: 内附链接 1、同旺科技USB to SPI 适配器 1、指令之间需要延时发送怎么办?循环过程需要延时怎么办?如何定时发送?现在这些都可以轻松解决; 2、只要在 “发送数据” 栏的Delay单元格里面输入相应的延迟时间就…...

2024年MathorCup数学建模D题量子计算在矿山设备配置及运营中的建模应用解题文档与程序
2024年第十四届MathorCup高校数学建模挑战赛 D题 量子计算在矿山设备配置及运营中的建模应用 原题再现: 随着智能技术的发展,智慧矿山的概念越来越受到重视。越来越多的设备供应商正在向智慧矿山整体解决方案供应商转型,是否具备提供整体解…...
)
自动化机器学习(TPOT优化临床试验数据)
目录 自动化机器学习(TPOT优化临床试验数据)1. 引言2. 项目背景与意义2.1 临床试验数据分析的重要性2.2 自动化机器学习的优势2.3 工业级数据处理与GPU加速需求3. 数据集生成与介绍3.1 数据集构成3.2 数据生成方法4. 自动化机器学习与TPOT4.1 自动化机器学习简介4.2 TPOT在临…...

回归——数学公式推导全过程
文章目录 一、案例引入 二、如何求出正确参数 1. 最速下降法 1)多项式回归 2)多重回归 2. 随机梯度下降法 一、案例引入 以Web广告和点击量的关系为例来学习回归,假设投入的广告费和点击量呈现下图对应关系。 思考:如果花了…...

Redisson分布式锁(超时释放及锁续期)
🍓 简介:java系列技术分享(👉持续更新中…🔥) 🍓 初衷:一起学习、一起进步、坚持不懈 🍓 如果文章内容有误与您的想法不一致,欢迎大家在评论区指正🙏 🍓 希望这篇文章对你有所帮助,欢…...

音视频学习(三十):fmp4
FMP4(Fragmented MP4)是 MP4(MPEG-4 Part 14)的扩展版本,它支持流式传输,并被广泛应用于DASH(Dynamic Adaptive Streaming over HTTP)和HLS(HTTP Live Streaming…...
)
【语料数据爬虫】Python爬虫|批量采集讲话稿数据【范文网】(2)
前言 本文是该专栏的第7篇,后面会持续分享Python爬虫采集各种语料数据的的干货知识,值得关注。 本文,笔者将主要介绍基于Python,来实现批量采集范文网“讲话稿”数据。同时,本文也是采集“讲话稿”数据系列的第2篇。 采集相关数据的具体细节部分以及详细思路逻辑,笔者将…...

Java安全-类的动态加载
类的加载过程 先在方法区找class信息,有的话直接调用,没有的话则使用类加载器加载到方法区(静态成员放在静态区,非静态成功放在非静态区),静态代码块在类加载时自动执行代码,非静态的不执行;先父类后子类,…...

内存取证之windows-Volatility 3
一,Volatility 3下载 1.安装Volatility 3。 要求:python3.7以上的版本,我的是3,11,这里不说python的安装方法 使用 pip 安装 Volatility 3: pip install volatility3 安装完成后,验证安装: v…...

WIFI p2p连接总结
p2p 设备角色 go 为 group owner,类似 ap 的功能,控制 p2p 组,每个 group 只有一个 go gc 是 client,为连接 go 的设备,是组成员 P2P 扫描 p2p discovery 利用 probe request 和 probe response 帧来搜索周围的 p2…...
:webview实现屏蔽所嵌套web页面异常弹窗)
React Native进阶(六十):webview实现屏蔽所嵌套web页面异常弹窗
文章目录 一、前言二、解决方案三、注意事项四、拓展阅读 一、前言 在React Native项目集成web页面时,webview嵌套方式是常用方式。如果所嵌套的web页面由于某种不可控因素导致出现错误弹窗信息,webview作为web嵌套方式应该对其行为可控。 React Nativ…...

fastapi+playwright爬取google搜索1-3页的关键词返回json
1,playwright无头 2,代理池随机获取代理ip 3,随机浏览行为,随机页面滚动 4,启用stealth模式 5,随机延时搜索 from fastapi import FastAPI, HTTPException from fastapi.responses import JSONResponse import asyncio from concurrent.futures import ThreadPool…...
)
施磊老师高级c++(五)
文章目录 一、设计模式二、单例模式(创建型模式)- 重点(共三种代码)1.1 饿汉式单例模式 -- 不受欢迎1.2 懒汉式单例模式 -- 受欢迎1.3 线程安全的懒汉式单例模式--锁volatile 三、工厂模式(创建型模式)3.1 简单工厂模式3.2 工厂方…...
)
鸿蒙相机开发实战:从设备适配到性能调优 —— 我的 ArkTS 录像功能落地手记(API 15)
引言:为什么我要写这份开发指南? 作为一名老技术,最近特别喜欢研究鸿蒙相机功能,而且目前已经更新到API15了,那么咱们更要好好研究一下。而且从手持云台到车载记录仪,每个项目都面临独特挑战:车…...

MySQL中怎么分析性能?
MySQL中主要有4种方式可以分析数据库性能,分别是慢查询日志,profile,Com_xxx和explain。 慢查询日志 先用下面命令查询慢查询日志是否开启, show variables like slow_query_log;# 一般默认都是以下结果 ---------------------…...

阿里云对象存储教程
搜“对象存储->免费试用” 选择你的心仪产品,我使用的是第一个 创建后获得三个实例: 点击右上角自己的账号可以进入到AccessKey管理界面 回到对象存储控制台创建Bucket实例 在以下文件中替换自己Bucket的信息即可美美使用~ package com.kitty.blog…...

【Node.js入门笔记10---http 模块】
Node.js入门笔记10 Node.js---http 模块一、核心功能0.学习http的前提1. 创建 HTTP 服务器2. 处理请求和响应 二、进阶用法1. 路由管理2. 处理 POST 请求3. 中间件模式 三、常见场景四、错误处理与安全五、对比 http 与 Express六、工具库推荐: Node.js—http 模块 …...

深拷贝在 JavaScript 中的几种实现方式对比
深拷贝在 JavaScript 中的几种实现方式对比 1. JSON 序列化法2. 结构化克隆(structuredClone)原理与使用 3. 自定义深拷贝函数原理与使用 性能对比与选择建议性能比较 综合建议:示例代码整合总结 在开发过程中,我们经常需要对对象…...

实验11 机器学习-贝叶斯分类器
实验11 机器学习-贝叶斯分类器 一、实验目的 (1)理解并熟悉贝叶斯分类器的思想和原理; (2)熟悉贝叶斯分类器的数学推导过程; (3)能运用贝叶斯分类器解决实际问题并体会算法的效果&a…...

Delta Lake 解析:架构、数据处理流程与最佳实践
Delta Lake 是一个基于 Apache Spark 的开源存储层,主要解决传统数据湖(Data Lake)缺乏 ACID 事务、数据一致性和性能优化的问题,使大数据处理更加可靠、高效。从本质上讲,它让数据湖具备了数据仓库的结构化管理能力&a…...

OpenHarmony子系统开发 - 电池管理(二)
OpenHarmony子系统开发 - 电池管理(二) 五、充电限流限压定制开发指导 概述 简介 OpenHarmony默认提供了充电限流限压的特性。在对终端设备进行充电时,由于环境影响,可能会导致电池温度过高,因此需要对充电电流或电…...

hive 数据简介
Hive介绍 1)Hive简介 Hive是基于Hadoop的一个数据仓库工具,用于结构化数据的查询、分析和汇总。Hive提供类SQL查询功能,它将SQL转换为MapReduce程序。 Hive不支持OLTP,Hive无法提供实时查询。 2)Hive在大数据生态环境…...

Win32桌面编程:ACLUI.DLL,EditSecurity(IntPtr hwndOwner, ISecurityInformation psi)
在Windows编程中,我们通常需要借助通用对话框的力量,今天我们就聊一下“安全属性表”通用对话框的使用心得。 当我们调用EditSecurity函数时: 1.EditSecurity将调用ISecurityInformation中的GetObjectInformation函数 在编写 ISecurityInf…...

数据分析异步进阶:aiohttp与Asyncio性能提升
一、时间轴呈现方案进程 2023-04-01:需求确认 确定目标:使用aiohttp与Asyncio提升采集性能,目标采集今日头条网站的新闻数据(标题、内容、时间等)。同时要求在程序中加入代理IP、Cookie和UserAgent的设置,…...