基于聚类与引力斥力优化的选址算法
在众多实际场景中,诸如消防设施选址、基站布局规划以及充电桩站点部署等,都面临着如何利用最少的资源,实现对所有目标对象全面覆盖的难题。为有效解决这类问题,本文提出一种全新的组合算法模型 —— 基于聚类与引力斥力优化的选址算法。
算法简介
1. K - means 聚类初始化
-
目的:快速生成初始中心点,初步划分数据分布。
-
方法:通过 K - means 算法将二维点聚类为 k 组,每组中心作为初始候选点。结合肘部法则或轮廓系数确定最优 k,并使用 K - means++ 优化初始中心选择。
2. 贪心算法补充覆盖
-
目的:确保所有数据点被覆盖,补充初始聚类未覆盖的区域。
-
方法:设置中心点覆盖半径 r,标记未被覆盖的点。每次从未覆盖点中选择能覆盖最多未覆盖点的点作为新中心点,直至所有点被覆盖。
3. 引力搜索算法(GSA)优化
-
目的:动态调整中心点位置,剔除冗余点,实现最少中心点全覆盖。
-
方法:
-
引力与斥力:中心点受未覆盖点引力(向数据移动)和其他中心点斥力(避免密集)。
-
合力驱动:根据引力和斥力的矢量和移动中心点,验证覆盖后更新位置。
-
剪枝操作:定期尝试删除冗余中心点,确保覆盖性的同时最小化中心点数量。
4. 组合算法优势
-
高效性:K - means 快速聚类,贪心算法快速覆盖,GSA 精细调优。
-
鲁棒性:结合几何覆盖与物理启发式优化,适应复杂分布。
-
可解释性:每一步逻辑清晰,便于根据场景调整参数或替换算法。
算法步骤与公式
第一步:K - means 聚类
1. 初始聚类中心
使用算法初始化聚类中心,选择距离已有中心最远的点作为新中心:![]()
![]()
2. 聚类分配与中心更新
计算每个点到中心的欧氏距离并分配:
![]()
重新计算中心坐标:
![]()
其中Sj是第j个聚类的数据点集合。
第二步:贪心算法覆盖未被覆盖点
1. 覆盖条件
点x被中心cj覆盖当且仅当:
![]()
2. 选择最优新中心
每次选择覆盖最多未覆盖点的点:
![]()
其中I(·)是指示函数。
第三步:引力搜索算法(GSA)优化中心点
1. 质量定义
中心点ci的质量mi由覆盖点数决定:
![]()
2. 引力计算
数据点x对中心ci的引力:

其中![]() 是时变引力常数。
是时变引力常数。
3. 斥力计算
其他中心cj对ci的斥力:
![]()
4. 合力与位置更新
总合力:
![]()
位置更新:

其中 λ是方向系数,step_size是步长。
5. 中心点剔除条件
若剔除中心ci后所有点仍被覆盖:
![]()
代码
python代码
import numpy as np
import matplotlib.pyplot as plt
from sklearn.cluster import KMeans# 第一步:K - means 聚类
# 随机生成一些示例数据
points = np.random.rand(100, 2)
# 设置聚类中心数
k = 10
# 执行 K - means 聚类
kmeans = KMeans(n_clusters=k, random_state=42)
idx = kmeans.fit_predict(points)
centers = kmeans.cluster_centers_# 第二步:贪心算法覆盖未被覆盖点
# 设置覆盖半径
r = 0.2
# 标记未被覆盖的点
covered = np.zeros(points.shape[0], dtype=bool)
for center in centers:distances = np.linalg.norm(points - center, axis=1)covered[distances <= r] = True
uncovered_points = points[~covered]while len(uncovered_points) > 0:max_coverage = 0best_point = Nonefor point in uncovered_points:distances = np.linalg.norm(points - point, axis=1)current_coverage = np.sum((distances <= r) & ~covered)if current_coverage > max_coverage:max_coverage = current_coveragebest_point = pointcenters = np.vstack((centers, best_point))distances = np.linalg.norm(points - best_point, axis=1)covered[distances <= r] = Trueuncovered_points = points[~covered]# 第三步:引力搜索算法(GSA)优化中心点
# 设置参数
T = 100 # 迭代次数
G0 = 1 # 引力常数
alpha = 2 # 质量衰减系数# 初始化质量
masses = np.zeros(centers.shape[0])
for i in range(centers.shape[0]):distances = np.linalg.norm(points - centers[i], axis=1)masses[i] = np.sum(distances <= r)for t in range(T):G = G0 * np.exp(-alpha * t / T)for i in range(centers.shape[0]):force = np.zeros(2)# 计算斥力for j in range(centers.shape[0]):if i != j:distance = np.linalg.norm(centers[i] - centers[j])if distance > 0:force += G * masses[j] * (centers[i] - centers[j]) / distance# 计算引力for j in range(points.shape[0]):distance = np.linalg.norm(centers[i] - points[j])if 0 < distance <= 2 * r:force -= G * (centers[i] - points[j]) / distance# 移动中心点(先假设移动)new_center = centers[i] + force# 检查移动后的中心点是否能覆盖所有数据点temp_centers = centers.copy()temp_centers[i] = new_centertemp_covered = np.zeros(points.shape[0], dtype=bool)for center in temp_centers:distances = np.linalg.norm(points - center, axis=1)temp_covered[distances <= r] = Trueif np.all(temp_covered):centers[i] = new_center# 尝试剔除冗余的中心点for i in range(centers.shape[0]):temp_centers = np.delete(centers, i, axis=0)temp_covered = np.zeros(points.shape[0], dtype=bool)for center in temp_centers:distances = np.linalg.norm(points - center, axis=1)temp_covered[distances <= r] = Trueif np.all(temp_covered):centers = temp_centersmasses = np.delete(masses, i)break# 输出最终的中心点
print('最终的中心点坐标:')
print(centers)# 可视化结果
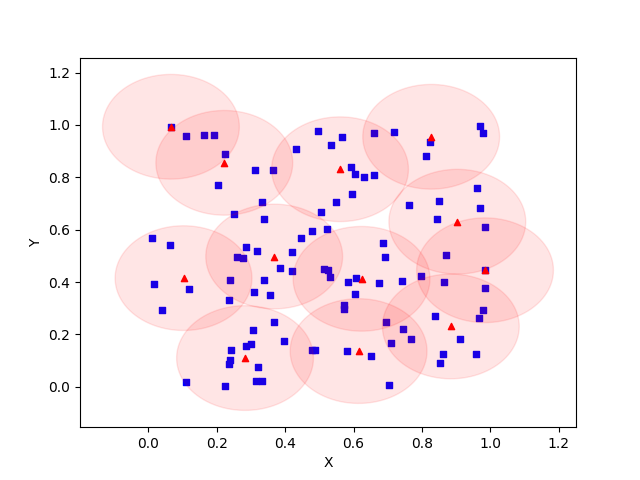
plt.figure()
plt.scatter(points[:, 0], points[:, 1], s=20, c='b', marker='s', edgecolors='b')
plt.scatter(centers[:, 0], centers[:, 1], s=20, c='r', marker='^', edgecolors='r')
# 为每个中心点绘制覆盖半径的透明圆
theta = np.linspace(0, 2 * np.pi, 100)
for center in centers:x = center[0] + r * np.cos(theta)y = center[1] + r * np.sin(theta)plt.fill(x, y, 'r', alpha=0.1, edgecolor='r')
plt.xlabel('X')
plt.ylabel('Y')
plt.show()
结果图
matlab代码
clear
clc
close all% 第一步:K - means 聚类
% 假设我们有一组二维点数据 points
% 随机生成一些示例数据
points = rand(100, 2);
% 设置聚类中心数
k = 10;
% 执行 K - means 聚类
[idx, centers] = kmeans(points, k);% 第二步:贪心算法覆盖未被覆盖点
% 设置覆盖半径
r = 0.2;
% 标记未被覆盖的点
covered = false(size(points, 1), 1);
for i = 1:size(centers, 1)distances = sqrt(sum((points - repmat(centers(i, :), size(points, 1), 1)).^2, 2));covered(distances <= r) = true;
end
uncovered_points = points(~covered, :);while ~isempty(uncovered_points)max_coverage = 0;best_point = [];for i = 1:size(uncovered_points, 1)distances = sqrt(sum((points - repmat(uncovered_points(i, :), size(points, 1), 1)).^2, 2));current_coverage = sum(distances <= r & ~covered);if current_coverage > max_coveragemax_coverage = current_coverage;best_point = uncovered_points(i, :);endendcenters = [centers; best_point];distances = sqrt(sum((points - repmat(best_point, size(points, 1), 1)).^2, 2));covered(distances <= r) = true;uncovered_points = points(~covered, :);
end% 第三步:引力搜索算法(GSA)优化中心点
% 设置参数
T = 100; % 迭代次数
G0 = 1; % 引力常数
alpha = 2; % 质量衰减系数% 初始化质量
masses = zeros(size(centers, 1), 1);
for i = 1:size(centers, 1)distances = sqrt(sum((points - repmat(centers(i, :), size(points, 1), 1)).^2, 2));masses(i) = sum(distances <= r);
endfor t = 1:TG = G0 * exp(-alpha * t / T);for i = 1:size(centers, 1)force = zeros(1, 2);% 计算斥力for j = 1:size(centers, 1)if i ~= jdistance = sqrt(sum((centers(i, :) - centers(j, :)).^2));if distance > 0force = force + G * masses(j) * (centers(i, :) - centers(j, :)) / distance;endendend% 计算引力for j = 1:size(points, 1)distance = sqrt(sum((centers(i, :) - points(j, :)).^2));if distance <= 2*r && distance > 0force = force - G * (centers(i, :) - points(j, :)) / distance;endend% 移动中心点(先假设移动)new_center = centers(i, :) + force;% 检查移动后的中心点是否能覆盖所有数据点temp_centers = centers;temp_centers(i, :) = new_center;temp_covered = false(size(points, 1), 1);for j = 1:size(temp_centers, 1)distances = sqrt(sum((points - repmat(temp_centers(j, :), size(points, 1), 1)).^2, 2));temp_covered(distances <= r) = true;endif all(temp_covered)centers(i, :) = new_center;endend% 尝试剔除冗余的中心点for i = 1:size(centers, 1)temp_centers = centers;temp_centers(i, :) = [];temp_covered = false(size(points, 1), 1);for j = 1:size(temp_centers, 1)distances = sqrt(sum((points - repmat(temp_centers(j, :), size(points, 1), 1)).^2, 2));temp_covered(distances <= r) = true;endif all(temp_covered)centers(i, :) = [];masses(i) = [];break;endend
end% 输出最终的中心点
disp('最终的中心点坐标:');
disp(centers);% 可视化结果
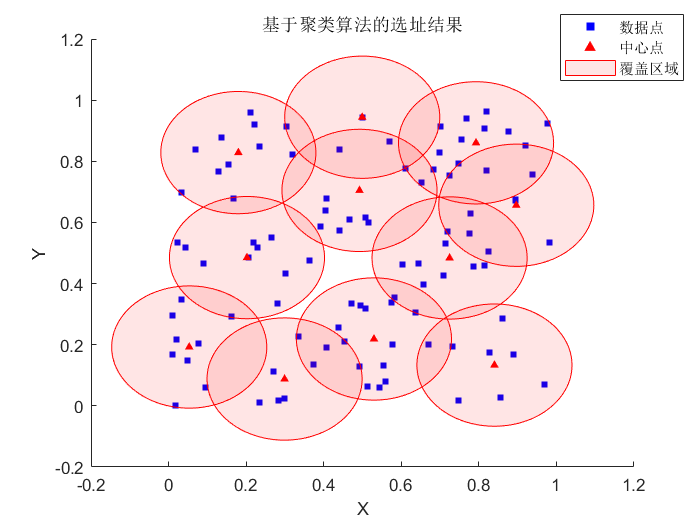
figure;
scatter(points(:, 1), points(:, 2), 20, 'bs', 'filled');
hold on;
scatter(centers(:, 1), centers(:, 2), 20,'r^', 'filled');
% 为每个中心点绘制覆盖半径的透明圆
theta = linspace(0, 2*pi, 100);
for i = 1:size(centers, 1)x = centers(i, 1) + r * cos(theta);y = centers(i, 2) + r * sin(theta);h = fill(x, y, 'r');set(h, 'FaceAlpha', 0.1); % 设置透明度为 0.1set(h, 'EdgeColor', 'r');
end
xlabel('X')
ylabel('Y')
title('基于聚类算法的选址结果')
legend('数据点', '中心点', '覆盖区域', 'Location', 'northeast')
结果图
相关文章:
基于聚类与引力斥力优化的选址算法
在众多实际场景中,诸如消防设施选址、基站布局规划以及充电桩站点部署等,都面临着如何利用最少的资源,实现对所有目标对象全面覆盖的难题。为有效解决这类问题,本文提出一种全新的组合算法模型 —— 基于聚类与引力斥力优化的选址…...

深入剖析雪花算法:分布式ID生成的核心方案
深入剖析雪花算法:分布式ID生成的核心方案 深入剖析雪花算法:分布式ID生成的核心方案一、雪花算法(Snowflake)概述二、雪花算法核心组成1. 64位二进制结构2. 时间戳起始点 三、工作原理与代码实现1. 生成逻辑2. Java代码示例3. 代…...

RK3568 pinctrl内容讲解
文章目录 一、pinctrl的概念`pinctrl` 的作用设备树中的 `pinctrl` 节点典型的 `pinctrl` 节点结构例子`pinctrl` 的重要性总结二、RK3568的pinctrl讲解1. `pinctrl` 节点2. `gpio0` 至 `gpio4` 子节点每个 `gpioX` 子节点的结构和作用3. `gpio1` 到 `gpio4` 子节点总结1. `aco…...

主流Web3公链的核心区别对比
以下是当前主流Web3公链的核心区别对比表,涵盖技术架构、性能、生态等关键维度: 特性以太坊 (Ethereum)SolanaBNB ChainPolygonAvalanche共识机制PoS(信标链分片)PoH(历史证明) PoSPoSA(权益证…...

Mac 电脑移动硬盘无法识别的解决方法
在使用 Mac 电脑的过程中,不少用户都遇到过移动硬盘没有正常推出,导致无法识别的问题。这不仅影响了数据的传输,还可能让人担心硬盘内数据的安全。今天,我们就来详细探讨一下针对这一问题的解决方法。 当发现移动硬盘无法识别时&…...

LeetCode Hot100 刷题笔记(4)—— 二叉树、图论
目录 一、二叉树 1. 二叉树的深度遍历(DFS:前序、中序、后序遍历) 2. 二叉树的最大深度 3. 翻转二叉树 4. 对称二叉树 5. 二叉树的直径 6. 二叉树的层序遍历 7. 将有序数组转换为二叉搜索树 8. 验证二叉搜索树 9. 二叉搜索树中第 K 小的元素 …...

安全框架SpringSecurity入门
安全框架 Spring Security 入门 Spring Security 是一个强大的安全框架,广泛用于保护基于 Spring 的应用程序。它提供了全面的安全服务,包括认证、授权、攻击防护等。下面我将为你详细介绍 Spring Security 的主要知识点,帮助你更好地理解和…...

c# 虚函数、接口、抽象区别和应用场景
文章目录 定义和语法实现要求继承和使用场景总结访问修饰符设计目的性能扩展性在 C# 里,虚函数、接口和抽象函数都能助力实现多态性,不过它们的定义、使用场景和特点存在差异,下面为你详细剖析: 定义和语法 虚函数:虚函数在基类里定义,使用 virtual 关键字,且有默认的实…...

MySQL Online DDL 技术深度解析
在MySQL数据库管理体系中,数据定义语言(DDL)和数据操作语言(DML)构成了数据库交互的基础。 DDL用于定义数据库对象,如数据库、表、列、索引等,相关命令包括CREATE、ALTER、DROP;DML则…...

【计算机视觉】YOLO语义分割
一、语义分割简介 1. 定义 语义分割(Semantic Segmentation)是计算机视觉中的一项任务,其目标是对图像中的每一个像素赋予一个类别标签。与目标检测只给出目标的边界框不同,语义分割能够在像素级别上区分不同类别,从…...

【SpringBoot + MyBatis + MySQL + Thymeleaf 的使用】
目录: 一:创建项目二:修改目录三:添加配置四:创建数据表五:创建实体类六:创建数据接口七:编写xml文件八:单元测试九:编写服务层十:编写控制层十一…...

git 按行切割 csv文件
# 进入Git Bash环境 # 基础用法(不保留标题行): split -l 1000 input.csv output_part_# 增强版(保留标题行): header$(head -n1 input.csv) # 提取标题 tail -n 2 input.csv | split -l 5000000 - --filt…...
在ensp进行OSPF+RIP+静态网络架构配置
一、实验目的 1.Ospf与RIP的双向引入路由消息 2.Ospf引入静态路由信息 二、实验要求 需求: 路由器可以互相ping通 实验设备: 路由器router7台 使用ensp搭建实验坏境,结构如图所示 三、实验内容 1.配置R1、R2、R3路由器使用Ospf动态路由…...

Qt实现HTTP GET/POST/PUT/DELETE请求
引言 在现代应用程序开发中,HTTP请求是与服务器交互的核心方式。Qt作为跨平台的C框架,提供了强大的网络模块(QNetworkAccessManager),支持GET、POST、PUT、DELETE等HTTP方法。本文将手把手教你如何用Qt实现这些请求&a…...

从零开始开发HarmonyOS应用并上架
开发环境搭建(1-2天) 硬件准备 操作系统:Windows 10 64位 或 macOS 10.13 内存:8GB以上(推荐16GB) 硬盘:至少10GB可用空间 软件安装 下载 DevEco Studio 3.1(官网:…...

Redis安全与配置问题——AOF文件损坏问题及解决方案
Java 中的 Redis AOF 文件损坏问题全面解析 一、AOF 文件损坏的本质与危害 1.1 AOF 持久化原理 Redis 的 AOF(Append-Only File) 通过记录所有写操作命令实现持久化。文件格式如下: *2\r\n$6\r\nSELECT\r\n$1\r\n0\r\n *3\r\n$3\r\nSET\r\…...

Java 线程池与 Kotlin 协程 高阶学习
以下是Java 线程池与 Kotlin 协程 高阶学习的对比指南,结合具体代码示例,展示两者在异步任务处理中的差异和 Kotlin 的简化优势: 分析: 首先,我们需要回忆Java中线程池的常见用法,比如通过ExecutorService创…...

3.第二阶段x64游戏实战-分析人物移动实现人物加速
免责声明:内容仅供学习参考,请合法利用知识,禁止进行违法犯罪活动! 本次游戏没法给 内容参考于:微尘网络安全 上一个内容:2.第二阶段x64游戏实战-x64dbg的使用 想找人物的速度,就需要使用Ch…...

leetcode 746. Min Cost Climbing Stairs
这道题用动态规划解决。这道题乍一看,含义有点模糊。有两个点要搞清楚:1)给定len个台阶的梯子,其实是要爬完(越过)整个梯子才算到达顶部,相当于顶部是第len1层台阶。台阶序号从0开始编号的话&am…...

网络信息安全应急演练方案
信息安全应急演练方案 总则 (一)编制目的 旨在建立并完善应对病毒入侵、Webshell 攻击以及未授权访问等信息安全突发事件的应急机制,提升组织对这类事件的快速响应、协同处理和恢复能力,最大程度降低事件对业务运营、数据安全和…...

H.264编码解析与C++实现详解
一、H.264编码核心概念 1.1 分层编码结构 H.264采用分层设计,包含视频编码层(VCL)和网络抽象层(NAL)。VCL处理核心编码任务,NAL负责封装网络传输数据。 1.2 NALU单元结构 // NAL单元头部结构示例 struc…...
:异常处理)
Python入门(5):异常处理
目录 1 异常处理基础概念 1.1 什么是异常? 1.2 异常与错误的区别 2 异常处理基础 2.1 常见内置异常类型 2.2 try-except 基本结构 2.3 捕获多个异常 2.4 抛出异常 2.4.1 使用raise语句 2.4.2 自定义异常类 3 高级异常处理技巧 3.1 不要过度捕…...
Scala(三)
本节课学习了函数式编程,了解到它与Java、C函数式编程的区别;学习了函数的基础,了解到它的基本语法、函数和方法的定义、函数高级。。。学习到函数至简原则,高阶函数,匿名函数等。 函数的定义 函数基本语法 例子&…...

什么是 Java 泛型
一、什么是 Java 泛型? 泛型(Generics) 是 Java 中一种强大的编程机制,允许在定义类、接口和方法时使用类型参数。通过泛型,可以将数据类型作为参数传递,从而实现代码的通用性和类型安全。 简单来说&…...
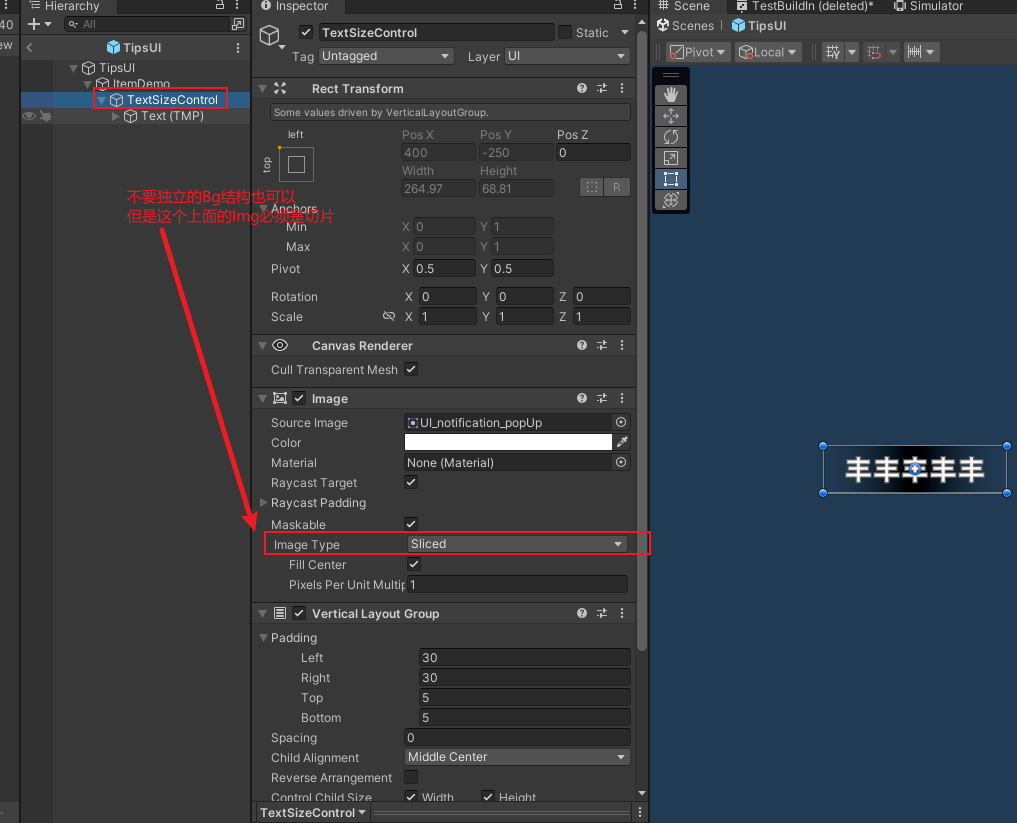
Unity中根据文字数量自适应长宽的对话气泡框UI 会自动换行
使用Ugui制作一个可以根据文本数量自动调整宽度,并可以自动换行的文字UI 或者不要独立的Bg,那么一定要把bg的img设置成切片...

【小也的Java之旅系列】02 分布式集群详解
文章目录 前言为什么叫小也 本系列适合什么样的人阅读正文单体优点缺点 CAP为什么CAP不可能全部满足?CAP 三选二 分布式事务分布式方案——SeataXA模式(强一致)AT模式(自动补偿,默认模式)TCC模式࿰…...

Ubuntu里安装Jenkins
【方式1】:下载war包,直接运行,需提前搭建Java环境,要求11或17,不推荐,war包下载地址,将war包上传到服务器,直接使用命令启动 java -jar /data/jenkins/jenkins.war【方式2】&#…...
C++包管理工具vcpkg的安装使用教程
前言 使用vcpkg可以更方便地安装各种库,省去配置的时间和配置失败的风险,类似python中的anaconda,懒人必备 参考 安装参考:https://bqcode.blog.csdn.net/article/details/135831901?fromshareblogdetail&sharetypeblogde…...

微服务面试题:配置中心
🧑 博主简介:CSDN博客专家,历代文学网(PC端可以访问:https://literature.sinhy.com/#/?__c1000,移动端可微信小程序搜索“历代文学”)总架构师,15年工作经验,精通Java编…...

Qt msvc2017程序无法用enigma vitrual box打包,用winrar打包
我们通常打包Qt程序用Enigma virtual box。这样我们的程序就可以在别的电脑上也能运行,但是有时候,我们发现Enigma virtual box在打包的时候,对于msvc2017需要编译的程序中引用webengineview模块,打包时候发现不能运行。 我们如何…...