Opencv计算机视觉编程攻略-第九节 描述和匹配兴趣点
一般而言,如果一个物体在一幅图像中被检测到关键点,那么同一个物体在其他图像中也会检测到同一个关键点。图像匹配是关键点的常用功能之一,它的作用包括关联同一场景的两幅图像、检测图像中事物的发生地点等等。
1.局部模板匹配
凭单个像素就判断两个关键点的相似度显然是不够的,因此要在匹配过程中考虑每个关键
点周围的图像块,对图像块中的像素进行逐个比较,但是并不是最可靠的。
第一步,使用FAST 检测器进行关键点提取:
// 定义特征检测器
cv::Ptr<cv::FeatureDetector> ptrDetector; // 泛型检测器指针
ptrDetector= // 这里选用FAST 检测器
cv::FastFeatureDetector::create(80);
// 检测关键点
ptrDetector->detect(image1,keypoints1);
ptrDetector->detect(image2,keypoints2);第二步,定义匹配框,在每个图像对的关键点之间进行匹配,这里使用逐像素相差匹配:
// 在第二幅图像中找出与第一幅图像中的每个关键点最匹配的
cv::Mat result;
std::vector<cv::DMatch> matches;
// 针对图像一的全部关键点
for (int i=0; i<keypoints1.size(); i++) {// 定义图像块neighborhood.x = keypoints1[i].pt.x-nsize/2;neighborhood.y = keypoints1[i].pt.y-nsize/2;// 如果邻域超出图像范围,就继续处理下一个点if (neighborhood.x<0 || neighborhood.y<0 ||neighborhood.x+nsize >= image1.cols ||neighborhood.y+nsize >= image1.rows)continue;// 第一幅图像的块patch1 = image1(neighborhood);// 存放最匹配的值cv::DMatch bestMatch;// 针对第二幅图像的全部关键点for (int j=0; j<keypoints2.size(); j++) {// 定义图像块neighborhood.x = keypoints2[j].pt.x-nsize/2;neighborhood.y = keypoints2[j].pt.y-nsize/2;// 如果邻域超出图像范围,就继续处理下一个点if (neighborhood.x<0 || neighborhood.y<0 ||neighborhood.x + nsize >= image2.cols ||neighborhood.y + nsize >= image2.rows)continue;// 第二幅图像的块patch2 = image2(neighborhood);// 匹配两个图像块cv::matchTemplate(patch1,patch2,result, cv::TM_SQDIFF);// 检查是否为最佳匹配if (result.at<float>(0,0) < bestMatch.distance) {bestMatch.distance= result.at<float>(0,0);bestMatch.queryIdx= i;bestMatch.trainIdx= j;}}// 添加最佳匹配matches.push_back(bestMatch);}第三步,选择置信度最高的一些点,进行展示:
// 提取25 个最佳匹配项
std::nth_element(matches.begin(),matches.begin() + 25,matches.end());
matches.erase(matches.begin() + 25,matches.end());// 绘制图像
cv::Mat matchImage;
cv::drawMatches(image1,keypoints1, // 第一幅图像image2,keypoints2, // 第二幅图像matches, // 匹配项的向量cv::Scalar(255,255,255), // 线条颜色cv::Scalar(255,255,255)); // 点的颜色
上述方法使用图块之间相似度进行评估,也可以使用opencv中的区域模板匹配方法进一步增大搜索精确度:
// 定义搜索区域
cv::Mat roi(image2, // 这里用图像的上半部分
cv::Rect(0,0,image2.cols,image2.rows/2));
// 进行模板匹配
cv::matchTemplate(roi, // 搜索区域
target, // 模板
result, // 结果
cv::TM_SQDIFF); // 相似度
// 找到最相似的位置
double minVal, maxVal;
cv::Point minPt, maxPt;
cv::minMaxLoc(result, &minVal, &maxVal, &minPt, &maxPt);
// 在相似度最高的位置绘制矩形
// 本例中为minPt
cv::rectangle(roi, cv::Rect(minPt.x, minPt.y,
target.cols, target.rows), 255);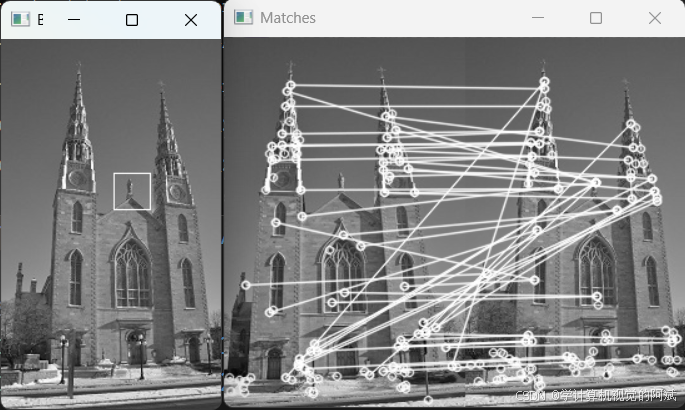
2.描述并匹配局部强度值模式
在图像分析中,可以用邻域包含的视觉信息来标识每个特征点,以便区分各个特征点。特征描述子通常是一个N 维的向量,在光照变化和拍摄角度发生微小扭曲时,它描述特征点的方式不会发生变化, 通常可以用简单的差值矩阵来比较描述子,例如用欧几里得距离等
基于特征的方法都包含一个检测器和一个描述子组件,与cv::Feature2D 相关的类也一样,它们都有一个检测函数(用于检测兴趣点)和一个计算函数(用于计算兴趣点的描述子)cv::SURF
和cv::SIFT,检测流程和上述一致。
// 1. 定义关键点的容器
std::vector<cv::KeyPoint> keypoints1;
std::vector<cv::KeyPoint> keypoints2;// 2. 定义特征检测器
cv::Ptr<cv::Feature2D> ptrFeature2D =
cv::xfeatures2d::SURF::create(2000.0);// 3. 检测关键点
ptrFeature2D->detect(image1,keypoints1);
ptrFeature2D->detect(image2,keypoints2);// 4. 提取描述子
cv::Mat descriptors1;
cv::Mat descriptors2;
ptrFeature2D->compute(image1,keypoints1,descriptors1);
ptrFeature2D->compute(image2,keypoints2,descriptors2);// 5. 构造匹配器
cv::BFMatcher matcher(cv::NORM_L2);cv::BFMatcher matcher2(cv::NORM_L2, // 度量差距
true); // 可以开启 交叉检查标志// 匹配两幅图像的描述子
std::vector<cv::DMatch> matches;
matcher.match(descriptors1,descriptors2, matches); 好的特征描述子不受照明和视角微小变动的影响,也不受图像中噪声的影响,因此它们通常
基于局部强度值的差值,SURF 描述子在关键点周围局部地应用下面的简易内核:
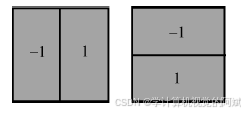
第一个内核度量水平方向的局部强度值差值(标为dx),第二个内核度量垂直方向的差值(标为dy)。通常将用于提取描述子向量的邻域尺寸定为特征值缩放因子的20 倍(即20σ)。然后把这个正方形区域划分成更小的4×4 子区域。对于每个子区域,在5×5 等分的位置上(用尺寸为2σ的内核)计算内核反馈值(dx 和dy)。
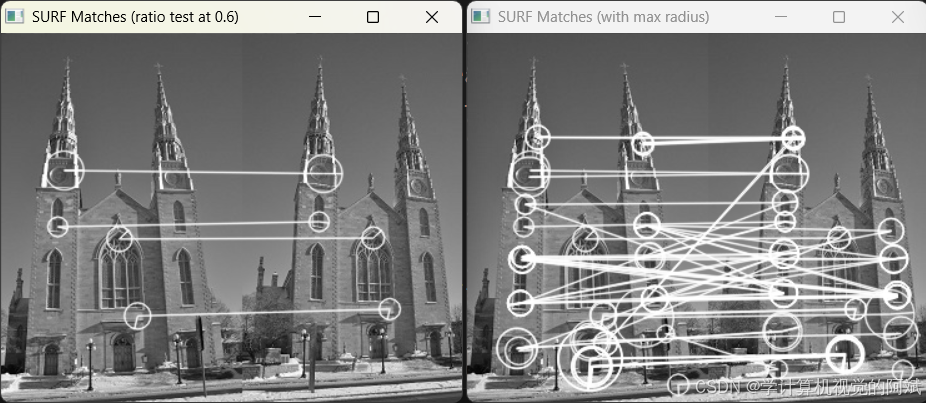
使用SURF 和SIFT 的特征和描述子可以进行尺度无关的匹配,能够取得较好的效果。
3.用二值描述子匹配关键点
上述描述子是浮点数类型的向量,大小为64、128等,这导致对它们的操作将耗资巨大,为了减少内存使用、降低计算量,人们引入了将一组比特位(0 和1)组合成二值描述子的概念。这里的难点在于,既要易于计算,又要在场景和视角变化时保持鲁棒性。
// 1. 定义特征检测器/描述子
// Construct the ORB feature object
cv::Ptr<cv::Feature2D> feature = cv::ORB::create(60);
// 大约60 个特征点
// 检测并描述关键点
// 2. 检测ORB 特征
feature->detectAndCompute(image1, cv::noArray(),
keypoints1, descriptors1);
feature->detectAndCompute(image2, cv::noArray(),
keypoints2, descriptors2);// 3. 构建匹配器
cv::BFMatcher matcher(cv::NORM_HAMMING); // 二值描述子一律使用Hamming 规范】// 4.匹配两幅图像的描述子
std::vector<cv::DMatch> matches;
matcher.match(descriptors1, descriptors2, matches);ORB 算法在多个尺度下检测特征点,这些特征点含有方向。基于这些特征点,ORB 描述子通过简单比较强度值,提取出每个关键点的表征,在BRIEF 描述子的基础上构建的,然后在关键点周围的邻域内随机选取一对像素点,创建一个二值描述子。
比较这两个像素点的强度值,如果第一个点的强度值较大,就把对应描述子的位(bit)设为1,否则就设为0。对一批随机像素点对进行上述处理,就产生了一个由若干位(bit)组成的描述子,通常采用128 到512 位(成对地测试)。

相关文章:
Opencv计算机视觉编程攻略-第九节 描述和匹配兴趣点
一般而言,如果一个物体在一幅图像中被检测到关键点,那么同一个物体在其他图像中也会检测到同一个关键点。图像匹配是关键点的常用功能之一,它的作用包括关联同一场景的两幅图像、检测图像中事物的发生地点等等。 1.局部模板匹配 凭单个像素就…...

JSON-lib考古现场:在2025年打开赛博古董店的奇妙冒险
各位在代码海洋里捡贝壳的探险家们!今天我们要打开一个尘封的Java古董箱——JSON-lib!这货可是2003年的老宝贝,比在座很多程序员的工龄还大!准备好穿越回Web 1.0时代,感受XML统治时期的余晖了吗? …...

Android: Handler 的用法详解
Android 中 Handler 的用法详解 Handler 是 Android 中用于线程间通信的重要机制,主要用于在不同线程之间发送和处理消息。以下是 Handler 的全面用法指南: 一、Handler 的基本原理 Handler 基于消息队列(MessageQueue)和循环器(Looper)工作,…...
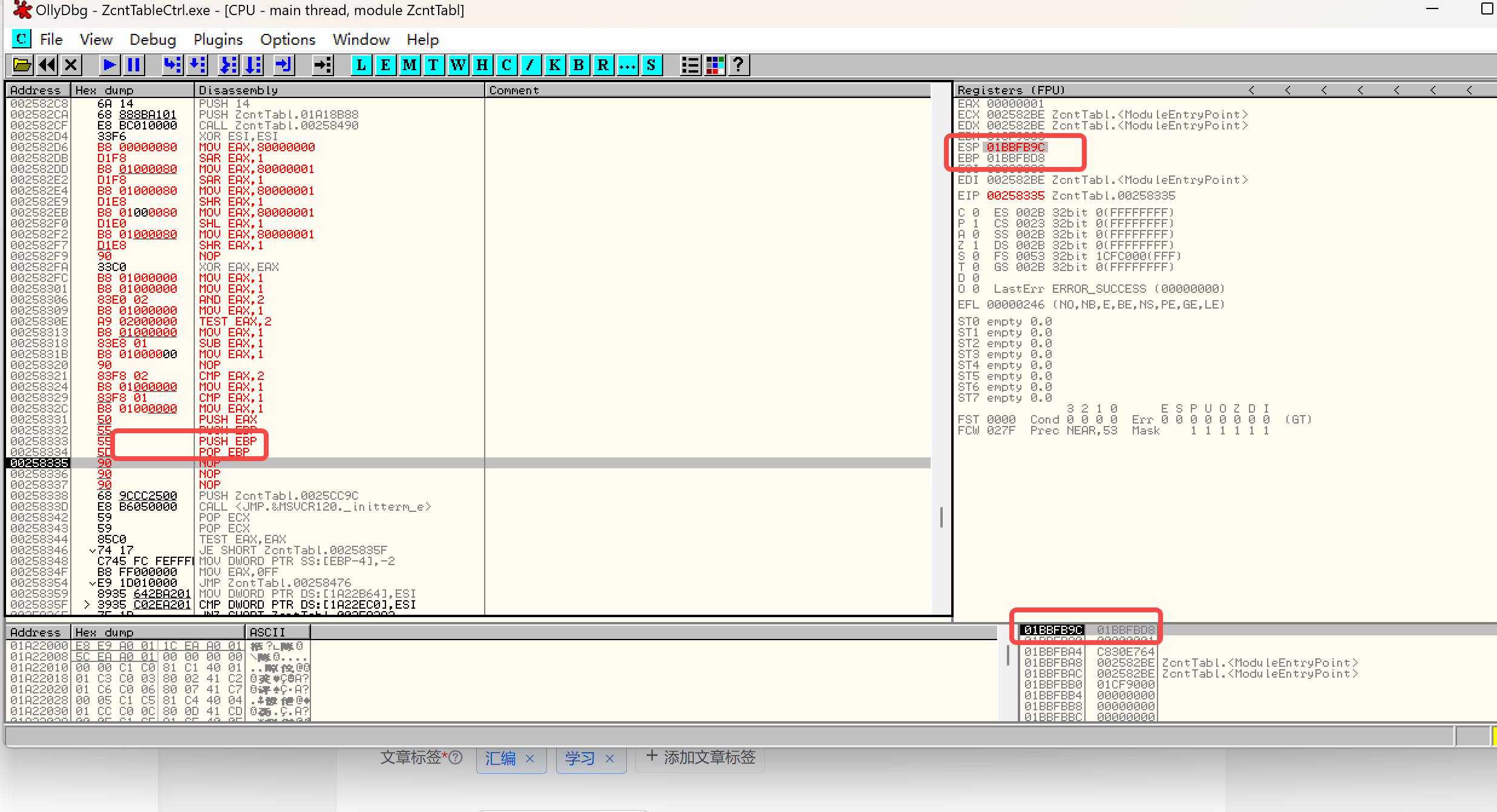
汇编学习之《push , pop指令》
学习本章前线了解ESP, EBP 指令 汇编学习之《指针寄存器&大小端学习》-CSDN博客 栈的特点: 好比一个垂直容器,可以陆续放入物体,但是先放的物体通常会被后面放的物体压着,只有等上面后放的物品拿出来后,才能…...

Python循环控制语句
1. 循环类型概述 Python提供两种主要的循环结构: while循环 - 在条件为真时重复执行for循环 - 遍历序列中的元素 2. while循环 基本语法 while 条件表达式:循环体代码示例 count 0 while count < 5:print(f"这是第{count1}次循环")count 13. f…...
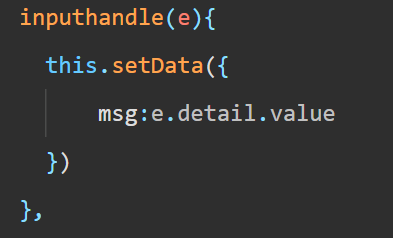
微信小程序(下)
目录 在事件处理函数中为 data 中的数据赋值 事件传参 bindinput 的语法格式 实现文本框和 data 之间的数据同步 条件渲染 结合 使用 wx:if hidden wx:if与 hidden 的对比 wx:for 手动指定索引和当前项的变量名 wx:key 的使用 WXSS 和 CSS 的关系 什么是 rpx 尺寸…...

【零基础入门unity游戏开发——2D篇】2D 游戏场景地形编辑器——TileMap的使用介绍
考虑到每个人基础可能不一样,且并不是所有人都有同时做2D、3D开发的需求,所以我把 【零基础入门unity游戏开发】 分为成了C#篇、unity通用篇、unity3D篇、unity2D篇。 【C#篇】:主要讲解C#的基础语法,包括变量、数据类型、运算符、…...

vector的介绍与代码演示
由于以后我们写OJ题时会经常使用到vector,所以我们必不可缺的是熟悉它的各个接口。来为我们未来作铺垫。 首先,我们了解一下: https://cplusplus.com/reference/vector/ vector的概念: 1. vector是表示可变大小数组的序列容器…...

ubuntu 22.04 解决LXC 报错CGroupV1 host system
解决CGroupV1 host system 报错 echo "cgroupv1 environment" sed -i s/^GRUB_CMDLINE_LINUX.*/GRUB_CMDLINE_LINUX_DEFAULT"quiet splash systemd.unified_cgroup_hierarchy0" / /etc/default/grub update-grub reboot 下载oracle 7 Linux 容器测试 l…...
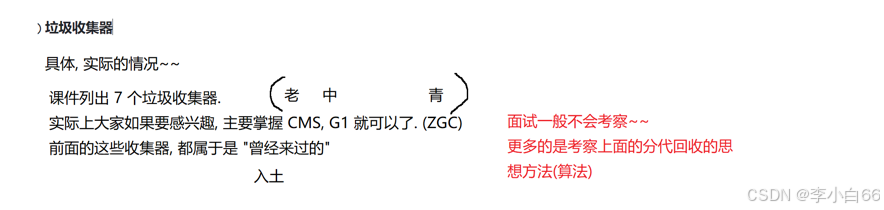
JavaEE初阶复习(JVM篇)
JVM Java虚拟机 jdk java开发工具包 jre java运行时环境 jvm java虚拟机(解释执行 java 字节码) java作为一个半解释,半编译的语言,可以做到跨平台. java 通过javac把.java文件>.class文件(字节码文件) 字节码文件, 包含的就是java字节码, jvm把字节码进行翻译转化为…...
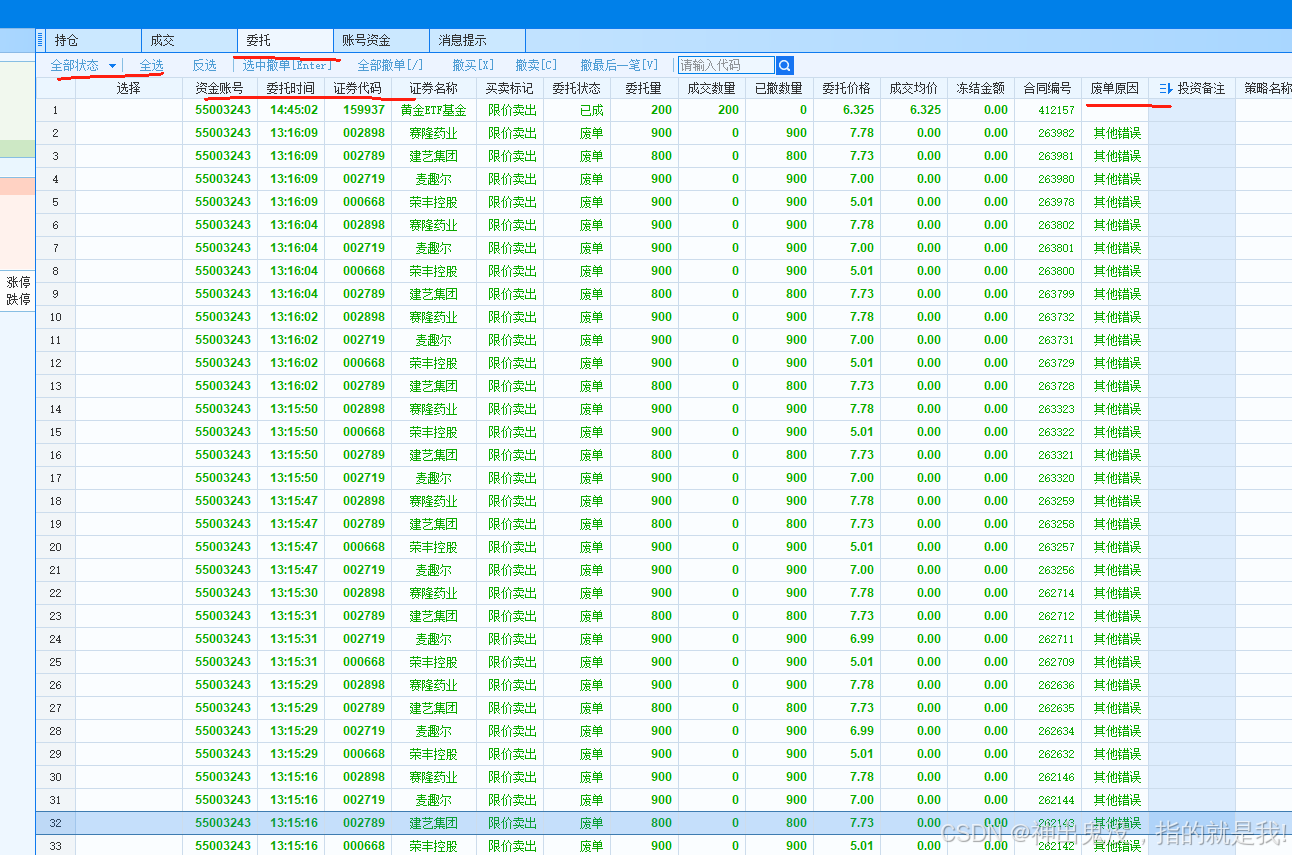
MINIQMT学习课程Day9
获取qmt账号的持仓情况后,我们进入下一步,如何获得当前账号的委托状况 还是之前的步骤,打开qmt,选择独立交易, 之后使用pycharm,编写py文件 导入包: from xtquant import xtdata from xtqua…...

动态规划似包非包系列一>组合总和IIV
目录 题目分析:状态表示:状态转移方程:初始化填表顺序返回值:代码呈现: 题目分析: 状态表示: 状态转移方程: 初始化填表顺序返回值: 代码呈现: class Soluti…...

Java 二叉树非递归遍历核心实现
非递归遍历的核心是用栈模拟递归的调用过程,通过手动维护栈来替代系统栈,实现前序、中序和后序遍历。以下是三种遍历的代码实现与关键逻辑分析: 一、二叉树遍历 1.1、前序遍历(根 → 左 → 右) 核心逻辑:…...

JavaScript性能优化实践:从微观加速到系统级策略
JavaScript性能优化实践:从微观加速到系统级策略 引言:性能优化的"时空折叠"思维 在JavaScript的世界里,性能优化如同在时间与空间的维度中折叠代码。本文将通过"时空折叠"的隐喻,从代码执行效率(时间维度)和内存占用(空间维度)两大核心,结合现代…...

《P1029 [NOIP 2001 普及组] 最大公约数和最小公倍数问题》
题目描述 输入两个正整数 x0,y0,求出满足下列条件的 P,Q 的个数: P,Q 是正整数。 要求 P,Q 以 x0 为最大公约数,以 y0 为最小公倍数。 试求:满足条件的所有可能的 P,Q 的个数。 输入格式 一行两个正整数 x0,y0。…...
【力扣hot100题】(052)课程表
什么人一学期要上2000节课啊jpg 看了非常久都没思路,主要是数据结构还没复习到图论,根本没思路怎么储存一个图…… 唯一记得的就是两种存储方法,一种是二维数组法,记录每一条边的有无,一种是只记录有的边,…...
SpringBoot配置文件多环境开发
目录 一、设置临时属性的几种方法 1.启动jar包时,设置临时属性 2.idea配置临时属性 3.启动类中创建数组指定临时属性 二、多环境开发 1.包含模式 2.分组模式 三、配置文件的优先级 1.bootstrap 文件优先: 2.特定配置文件优先 3.文件夹位置优…...

RSA和ECC在密钥长度相同的情况下哪个更安全?
现在常见的SSL证书,如:iTrustSSL都支持RSA和ECC的加密算法,正常情况下RAS和ECC算法该如何选择呢?实际上在密钥长度相同的情况下,ECC(椭圆曲线密码学)通常比RSA(Rivest-Shamir-Adle…...

Dive into Deep Learning - 2.4. Calculus (微积分)
Dive into Deep Learning - 2.4. Calculus {微积分} 1. Derivatives and Differentiation (导数和微分)1.1. Visualization Utilities 2. Chain Rule (链式法则)3. DiscussionReferences 2.4. Calculus https://d2l.ai/chapter_preliminaries/calculus.html For a long time, …...
)
【备考高项】附录:合同法全文(428条全)
更多内容请见: 备考信息系统项目管理师-专栏介绍和目录 文章目录 第一章 一般规定第二章 合同的订立第三章 合同的效力第四章 合同的履行第五章 合同的变更和转让第六章 合同的权利义务终止第七章 违约责任第八章 其他规定第九章 买卖合同第十章 供用电、水、气、热力合同第十…...

Ubuntu安装Podman教程
1、先修改apt源为阿里源加速 备份原文件: sudo cp /etc/apt/sources.list /etc/apt/sources.list.backup 修改源配置: vim sources.list删除里面全部内容后,粘贴阿里源: deb http://mirrors.aliyun.com/ubuntu/ focal main re…...
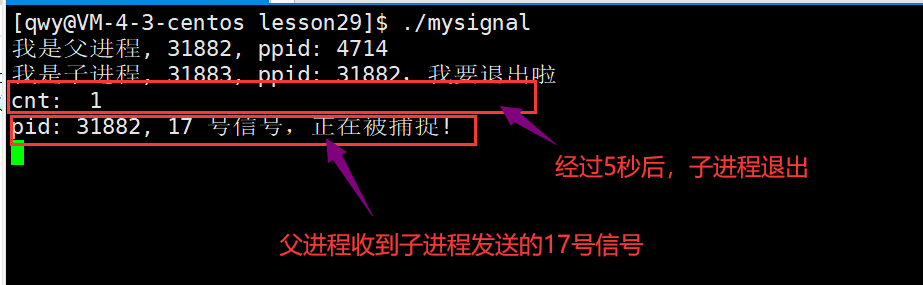
9.进程信号
信号量 信号量是什么? 本质是一个计数器,通常用来表示公共资源中,资源数量多少的问题。 公共资源:可以被多个进程同时访问的资源。 访问没有保护的公共资源会导致数据不一致问题 什么是数据不一致问题 由于公共资源…...

python爬虫:小程序逆向(需要的工具前期准备)
前置知识点 1. wxapkg文件 如何查看小程序包文件 打开wechat的设置: .wxapkg概述 .wxapkg是小程序的包文件格式,且其具有独特的结构和加密方式。它不仅包含了小程序的源代码,还包括了图像和其他资源文件,这些内容在普通的文件…...
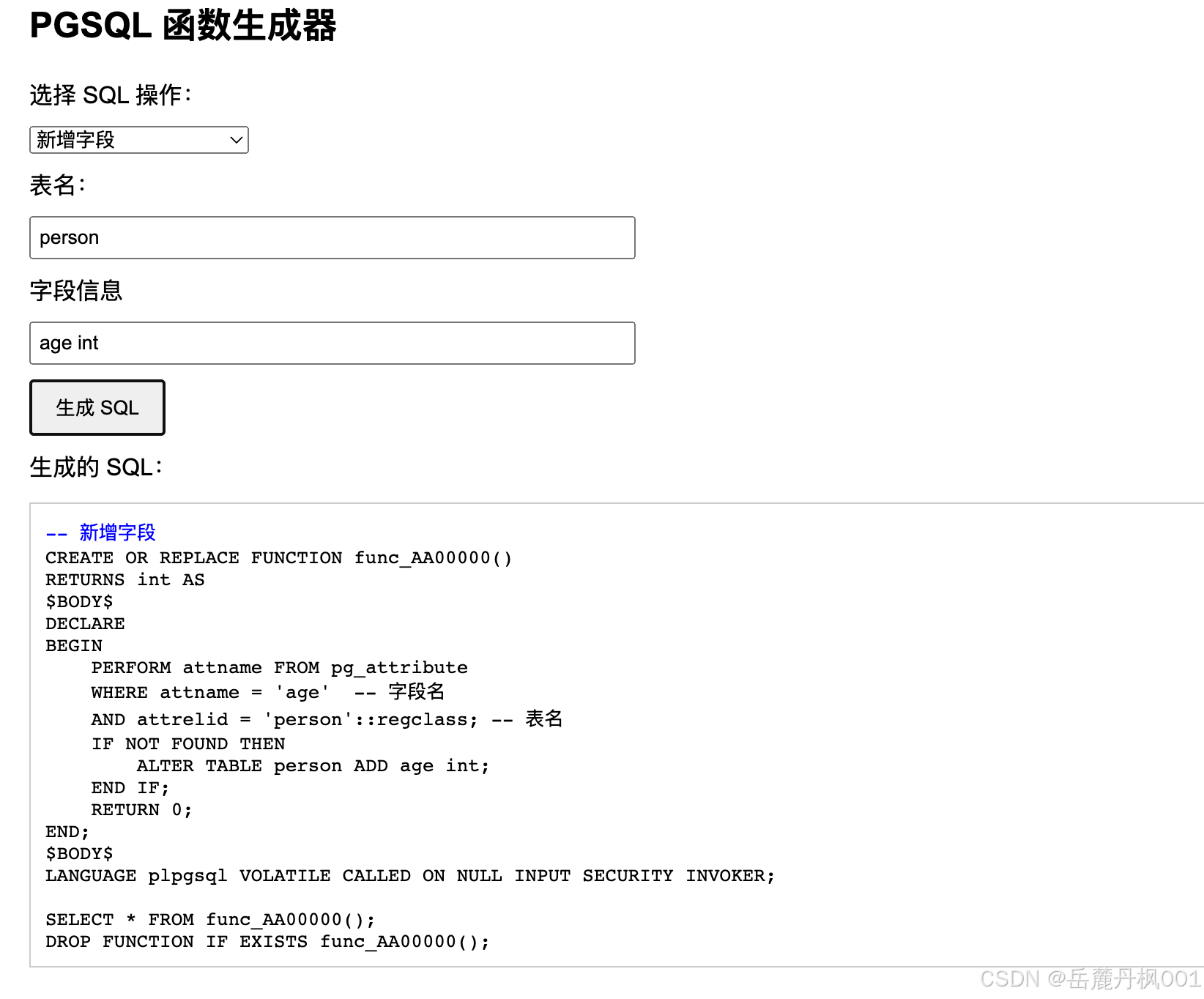
PGSQL 对象创建函数生成工具
文章目录 代码结果 代码 <!DOCTYPE html> <html lang"zh"> <head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>PGSQL 函数生成器</tit…...
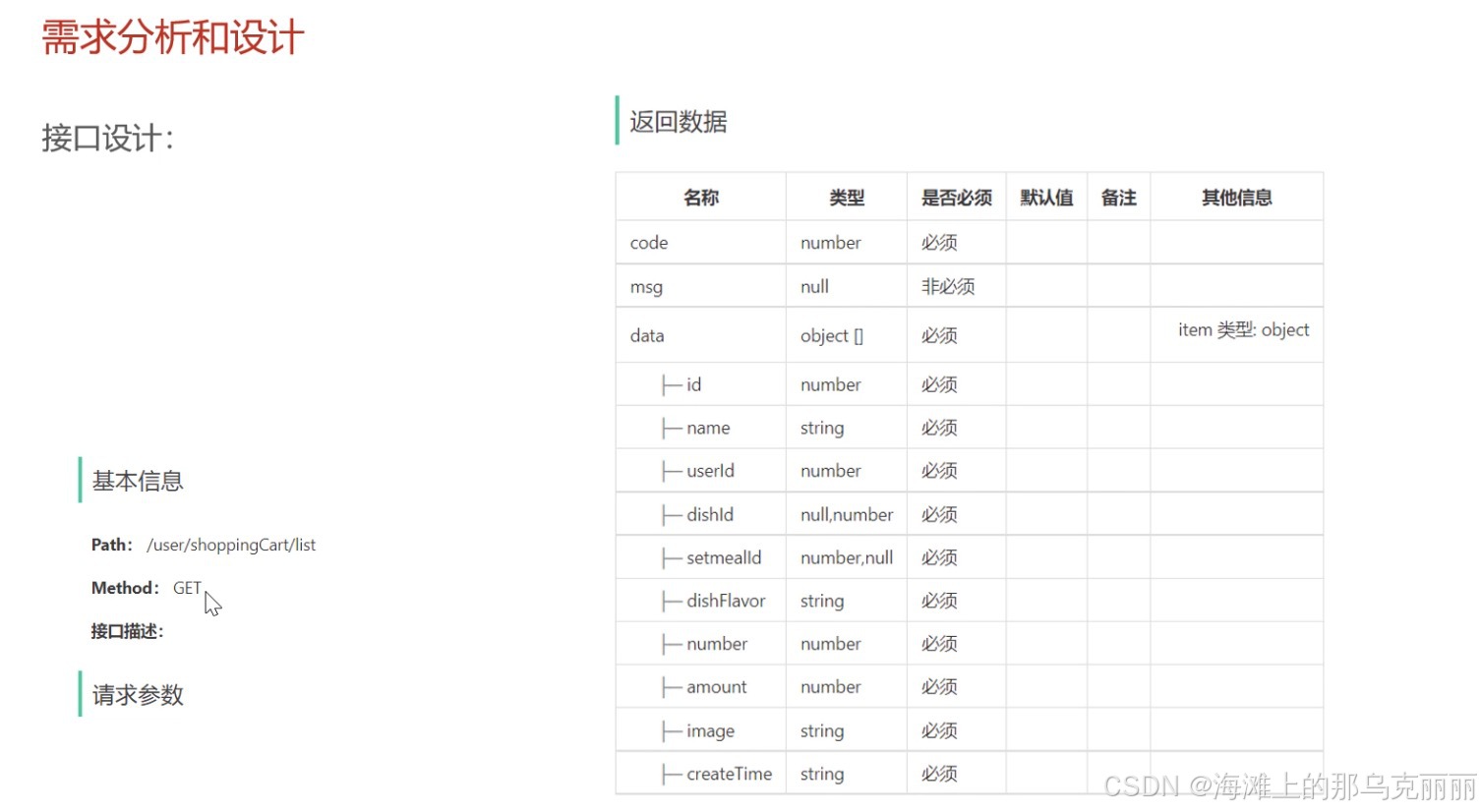
查询当前用户的购物车和清空购物车
业务需求: 在小程序用户端购物车页面能查到当前用户的所有菜品或者套餐 代码实现 controller层 GetMapping("/list")public Result<List<ShoppingCart>> list(){List<ShoppingCart> list shoppingCartService.shopShoppingCart();r…...
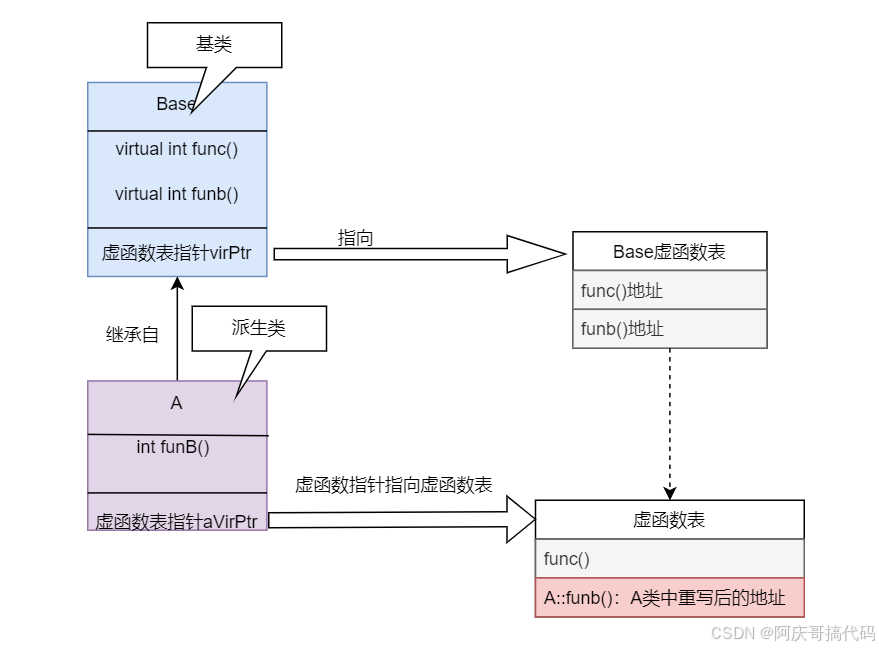
八、重学C++—动态多态(运行期)
上一章节: 七、重学C—静态多态(编译期)-CSDN博客https://blog.csdn.net/weixin_36323170/article/details/146999362?spm1001.2014.3001.5502 本章节代码: cpp/dynamicPolymorphic.cpp CuiQingCheng/cppstudy - 码云 - 开源中…...

react redux的学习,多个reducer
redux系列文章目录 第一章 简单学习redux,单个reducer 前言 前面我们学习到的是单reducer的使用;要知道redux是个很强大的状态存储库,可以支持多个reducer的使用。 combineReducers combineReducers是Redux中的一个辅助函数,主要用于…...

饮食助力进行性核上性麻痹患者,提升生活质量
进行性核上性麻痹是一种少见的神经系统变性疾病,患者会出现姿势不稳、眼球运动障碍等症状。合理的饮食对于维持患者身体机能、延缓病情发展有重要意义。 高蛋白质食物是饮食结构的重要部分。像瘦肉、去皮禽肉、鱼类、豆类及其制品,还有低脂奶制品等&…...

leetcode117 填充每个节点的下一个右侧节点指针2
LeetCode 116 和 117 都是关于填充二叉树节点的 next 指针的问题,但它们的区别在于 树的类型 不同,117与 116 题类似,但给定的树是 普通二叉树(不一定完全填充),即某些节点可能缺少左或右子节点。 树的结构…...
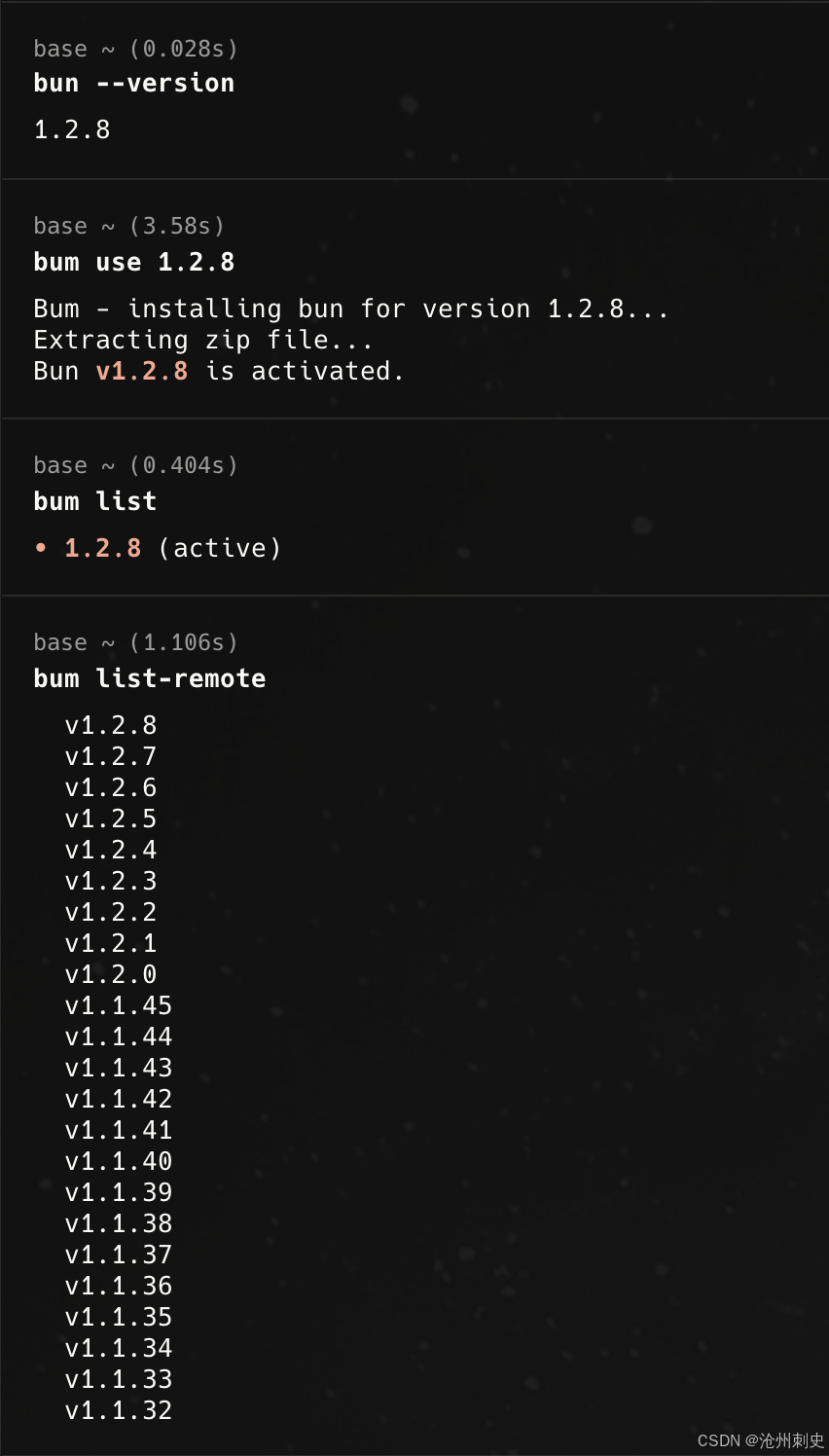
bun 版本管理工具 bum 安装与使用
在使用 node 的过程中,我们可能会因为版本更新或者不同项目的要求而频繁切换 node 版本,或者是希望使用更简单的方式安装不同版本的 node,这个时候我们一般会用到 nvm 或者类似的工具。 在我尝试使用 bun 的时候,安装前第一个想到…...