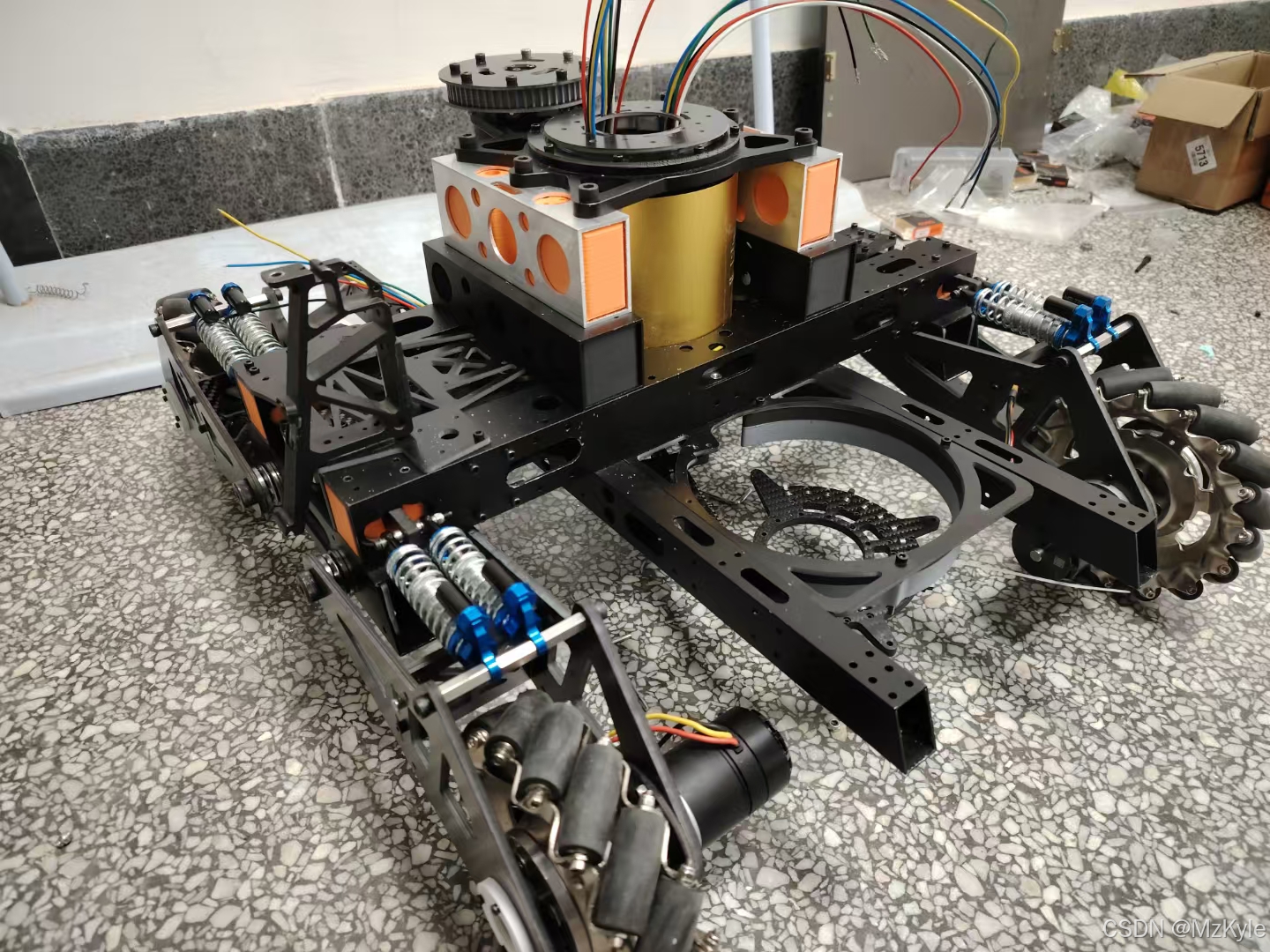
底盘---麦克纳姆轮(Mecanum Wheel)
一、基本定义与起源
- 定义:麦克纳姆轮是一种实现全向移动的特殊轮式结构,通过在主轮周边安装多个倾斜的辊子(小轮),使设备能够在平面上向任意方向移动(包括横向、斜向、旋转等),无需转向机构。这种独特的设计打破了传统轮式移动的方向限制,为各类移动设备赋予了极高的机动性。
- 起源:由瑞典工程师 Bengt Ilon 于 1973 年发明,隶属于麦克纳姆公司(Mecanum AB),因此得名。它的诞生为机器人技术、自动化物流等领域带来了革命性的变化,开启了全向移动的新篇章。
二、结构与核心组件
- 主轮主体
- 圆形轮毂,通常由金属(如铝合金,具有强度高、质量轻的特点,适用于对负载有一定要求的场景)或高强度塑料(成本较低,加工方便,常用于小型或轻载设备)制成,连接驱动轴,由电机直接或间接驱动旋转。轮毂的尺寸设计需综合考虑设备的整体尺寸、承重以及所需的运动速度等因素,一般较大的轮毂在通过障碍物时更具优势,但会增加转动惯量。
- 辊子(小轮)
- 数量:均匀分布在主轮周边,常见为 8 - 12 个。数量的选择会影响轮子与地面的接触特性,较多的辊子能提供更平稳的支撑,但也会增加结构复杂度和摩擦力。
- 形状:
- 圆柱形辊子:通用型,接触面积均匀,适合平坦地面,在一般的室内环境如工厂车间、仓库等应用广泛,能保证稳定的摩擦力传递,实现精确的运动控制。
- 圆锥形辊子:减少横向滑动摩擦,适合高速或高精度控制,但加工难度较高。圆锥形状使得辊子在横向受力时能更好地适应,常用于对运动精度和速度要求苛刻的场景,如精密仪器搬运、高速自动化生产线。
- 关键参数:
- 倾斜角度:
- 辊子轴线与主轮轴线的夹角,常见为 45°(最通用),能在横向和纵向运动能力上达到较好的平衡,适用于大多数场景。
- 30°:在一些对纵向驱动力要求稍高,同时兼顾横向移动的场合使用,例如搬运较重物品且需要偶尔调整横向位置的工业机器人。
- 60°:侧重于横向移动能力,适用于空间局促、需要频繁侧向调整的场景,如在狭窄货架间穿梭的仓储机器人。
- 安装方式:对称排列,确保受力平衡,避免轮子在运转过程中出现偏心、晃动等问题,影响运动精度和设备稳定性。
- 倾斜角度:
- 驱动系统
- 每个麦克纳姆轮由独立电机驱动,这是实现其复杂运动的关键。通过精确控制各轮转速和转向,合成所需运动方向。电机类型多样,常见的有直流无刷电机(效率高、寿命长、控制精度高,广泛应用于中高端设备)、步进电机(定位精度极高,适合低速、高精度的运动控制场景,如科研实验平台),选择依据主要包括设备的动力需求、控制精度要求以及成本预算。

- 每个麦克纳姆轮由独立电机驱动,这是实现其复杂运动的关键。通过精确控制各轮转速和转向,合成所需运动方向。电机类型多样,常见的有直流无刷电机(效率高、寿命长、控制精度高,广泛应用于中高端设备)、步进电机(定位精度极高,适合低速、高精度的运动控制场景,如科研实验平台),选择依据主要包括设备的动力需求、控制精度要求以及成本预算。
三、工作原理:全向移动的实现
- 摩擦力分解
- 当主轮旋转时,辊子与地面接触点的运动方向可分解为:
- 主轮切线方向(沿主轮旋转方向的力,推动设备前进/后退):这是实现设备前后移动的主要动力来源,类似于传统车轮的驱动方式。
- 辊子轴线方向(辊子自由转动,允许横向滑动):由于辊子可绕自身轴线自由转动,此方向的摩擦力不会阻碍设备的横向移动,反而为侧向运动提供了可能。
- 倾斜的辊子使接触点的摩擦力同时产生纵向(主轮方向)和横向(辊子轴线方向)的分力,这两个分力相互配合,为实现全向移动奠定了基础。
- 当主轮旋转时,辊子与地面接触点的运动方向可分解为:
- 运动合成
- 通过控制 4 个轮子的转速和转向(顺时针/逆时针),可合成任意方向的合力:
- 若 4 轮转速相同、转向一致,设备直线前进/后退,此时各轮子的纵向分力共同作用,推动设备沿直线运动。
- 若两侧轮转速相反,设备原地旋转,依靠轮子横向分力的差异产生旋转力矩,实现原地转向,在狭小空间调整姿态极为便捷。
- 若各轮转速和转向不同,可实现横向平移、斜向移动等复杂运动。例如,通过精确控制对角线上两个轮子的转速差,可实现斜向移动,满足多样化的作业需求。
- 通过控制 4 个轮子的转速和转向(顺时针/逆时针),可合成任意方向的合力:
四、分类与特点
| 分类方式 | 类型 | 特点 |
|---|---|---|
| 辊子倾斜角度 | 45°麦克纳姆轮 | 最常用,平衡横向与纵向运动能力,适用于大多数场景,无论是工业搬运还是服务机器人的室内导航,都能表现出色。 |
| 90°辊子(类全向轮) | 横向移动能力极强,但纵向驱动效率低,接近传统全向轮(Omni Wheel),在对横向快速移动需求高、纵向移动距离短的场景,如快速分拣流水线旁的物料横向转运环节有优势。 | |
| 辊子形状 | 圆柱形辊子 | 通用型,接触面积均匀,适合平坦地面,维护简单,成本较低,是多数常规应用的首选。 |
| 圆锥形辊子 | 减少横向滑动摩擦,适合高速或高精度控制,但加工难度较高,常用于高端精密设备,如芯片制造车间的搬运机器人。 | |
| 驱动方式 | 单电机驱动 | 结构简单,成本低,但控制精度依赖算法,适用于对成本敏感、运动精度要求不特别高的小型设备,如简易教育机器人套件。 |
| 双电机驱动(独立辊子) | 可单独控制辊子转速,实现更复杂运动,但结构复杂、成本高,在高端工业机器人、特种作业机器人领域,能满足复杂任务的精准操控需求。 |
五、核心优势与局限性
- 优势:
- 全向移动能力:无需转向,可在狭小空间灵活移动,定位精度高。在复杂的工业布局中,能快速绕过障碍物,精准停靠在指定工位,极大提高生产效率。
- 运动平滑性:辊子连续接触地面,震动小,适合精密设备。对于光学仪器加工、电子芯片制造等对震动敏感的工艺环节,可有效避免因震动引起的产品缺陷。
- 控制灵活性:通过电机转速调节,可实现无级变速和任意角度移动,满足多样化的任务需求,无论是直线加速、减速,还是复杂的曲线轨迹移动,都能精准控制。
- 局限性:
- 结构复杂:辊子和轴承数量多,制造和维护成本高。一旦某个辊子或轴承出现故障,排查和修复难度较大,需要专业技术人员和工具。
- 地面适应性差:不适合粗糙、凹凸或松软地面(辊子易卡滞或陷住)。在户外建筑工地、未硬化的土路等环境,运动性能会大打折扣,甚至无法正常工作。
- 负载限制:横向承载能力低于纵向,重载时易磨损辊子。当搬运重物且需要频繁侧向移动时,辊子的磨损加剧,缩短使用寿命,增加维护成本。
- 运动学解算复杂:需通过矩阵运算合成速度,对控制算法要求较高。开发人员需要具备深厚的数学和控制理论知识,增加了控制系统的设计难度和开发周期。
六、典型应用场景
- 工业领域
- AGV 搬运机器人:在工厂流水线中精准搬运物料,适应狭窄通道。例如汽车制造车间,能在生产线旁穿梭,将零部件按时送达装配工位,提高生产节拍。
- 协作机器人:与人类共融作业,灵活调整位置(如手术机器人辅助定位)。在手术室内,可根据医生指令精确移动,辅助手术器械精准定位,降低手术风险。
- 服务与消费领域
- 仓储机器人:高效分拣货物,提升仓库空间利用率。在大型电商仓库,快速穿梭于货架间,准确抓取货物,实现快速出入库。
- 商用清洁机器人:在复杂环境中完成清扫,避免碰撞。能在商场、酒店大堂等人员密集、布局复杂的场所,灵活避开障碍物,完成地面清洁任务。
- 特种场景
- 医疗设备:如移动手术平台,精准靠近病床。在紧急救援现场或医院病房,可平稳快速移动至患者床边,为手术争取时间。
- 军事侦察机器人:在有限空间内快速调整姿态,适应复杂地形(需改良型辊子)。通过特殊设计的辊子,在山地、丛林等复杂野外环境,利用全向移动优势隐蔽侦察。
- 科研与教育
- 机器人竞赛(如 RoboCup):利用全向移动优势实现快速攻防。参赛队伍借助麦克纳姆轮的灵活操控,设计复杂战术,在赛场上快速移动、转向,抢夺球权。
- 高校实验平台:作为全向运动控制的典型案例,帮助学生深入理解运动学、动力学原理,培养机器人开发技能。

七、与其他全向轮的对比
| 类型 | 麦克纳姆轮 | 全向轮(Omni Wheel) | 差速轮(普通轮) |
|---|---|---|---|
| 辊子角度 | 倾斜(45°为主) | 垂直(90°,横向自由转动) | 无辊子,仅主轮 |
| 移动能力 | 全向(任意方向合成) | 横向自由 + 纵向驱动 | 仅前进/后退 + 转向(需差速) |
| 结构复杂度 | 高(多倾斜辊子) | 中(横向辊子) | 低(简单轮子) |
| 地面适应性 | 中等(依赖平坦度) | 中等(横向辊子易卡异物) | 高(仅主轮接触) |
| 典型应用 | 精密定位、复杂轨迹 | 轻载搬运、快速横向移动 | 常规移动(如普通小车) |
八、控制原理与运动学模型
- 速度合成公式
设 4 个轮子的转速为 v 1 v_1 v1, v 2 v_2 v2, v 3 v_3 v3, v 4 v_4 v4,通过倾斜角度(θ = 45°)的运动学矩阵,可计算机器人的整体速度:
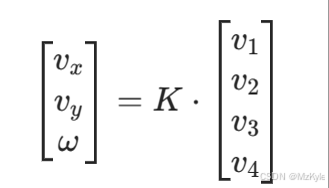
其中 v x v_x vx, v y v_y vy为平移速度, 为旋转角ω速度,K为转换矩阵(需根据轮间距和角度设计)。在实际应用中,不同的设备尺寸、轮子布局会导致转换矩阵 K 的具体形式有所差异,需要根据实际情况精确推导。
2. 控制算法
- 常用 逆运动学 解算各轮转速,结合 PID 控制实现速度闭环。PID 控制通过比例、积分、微分环节,实时调整电机输出,使实际速度快速跟踪目标速度,保证运动的稳定性和精度。
- 高级应用需考虑动力学模型(如摩擦补偿、负载分配)。在高速、重载或高精度运动场景,考虑轮子与地面的摩擦力变化、各轮子的负载不均等因素,对控制算法进行优化,提高系统的鲁棒性。
九、设计与使用注意事项
- 机械设计
- 辊子轴承需选择低摩擦、高耐用性类型(如滚珠轴承),减少能量损耗,延长使用寿命,同时要考虑轴承的密封性能,防止灰尘、碎屑等异物进入,影响转动。
- 主轮与辊子的直径比需合理(通常主轮直径为辊子的 3 - 5 倍),避免打滑。过大或过小的直径比都会影响轮子的抓地力和运动性能,需要通过实验和模拟进行优化。
- 地面要求
- 优先使用平坦硬质地面(如瓷砖、木地板),避免地毯、沙地或高落差地形。若无法避免在较差地面运行,可考虑对地面进行预处理(如铺设临时导轨)或对轮子进行适应性改进(如增加防滑花纹、提高辊子离地间隙)。
- 负载匹配
- 横向负载不超过额定值的 50%,防止辊子变形或轴承损坏。在设计搬运任务时,要根据麦克纳姆轮的负载特性合理分配物品重量,避免出现偏载现象。
- 维护要点
- 定期清理辊子间的异物(如毛发、碎屑),检查轴承润滑情况。可制定详细的维护计划,定期拆解轮子进行深度保养,及时更换磨损的辊子和轴承,确保设备长期稳定运行。
十、总结
麦克纳姆轮通过巧妙的辊子倾斜设计,将传统轮子的单向驱动转化为全向运动,成为精密移动设备的核心部件。尽管存在结构复杂和地面适应性的限制,但其在工业自动化、服务机器人等领域的优势不可替代。随着材料和控制算法的进步,麦克纳姆轮的应用场景将不断扩展,推动机器人移动技术向更灵活、精准的方向发展。未来,有望在更多新兴领域,如深海探测、太空探索等极端环境下的移动装备中看到它的身影,为人类的科技探索之旅助力。
相关文章:
底盘---麦克纳姆轮(Mecanum Wheel)
一、基本定义与起源 定义:麦克纳姆轮是一种实现全向移动的特殊轮式结构,通过在主轮周边安装多个倾斜的辊子(小轮),使设备能够在平面上向任意方向移动(包括横向、斜向、旋转等),无需…...
深入源码级别看spring bean创建过程
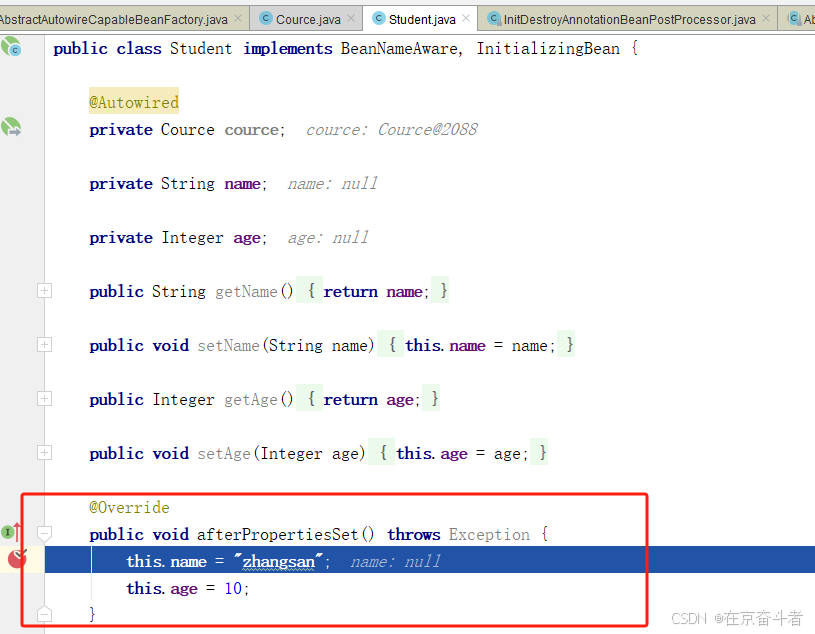
我们通常聊到spring bean的生命周期,大多是从网上找帖子背些基本概念,这样我们学到的东西是不够直观清晰的,这篇文章我就试着从源码级别来讲清楚bean的创建过程。 一、准备demo代码 我们既然要深入源码来看bean的创建过程,那么就…...
I/O进程1
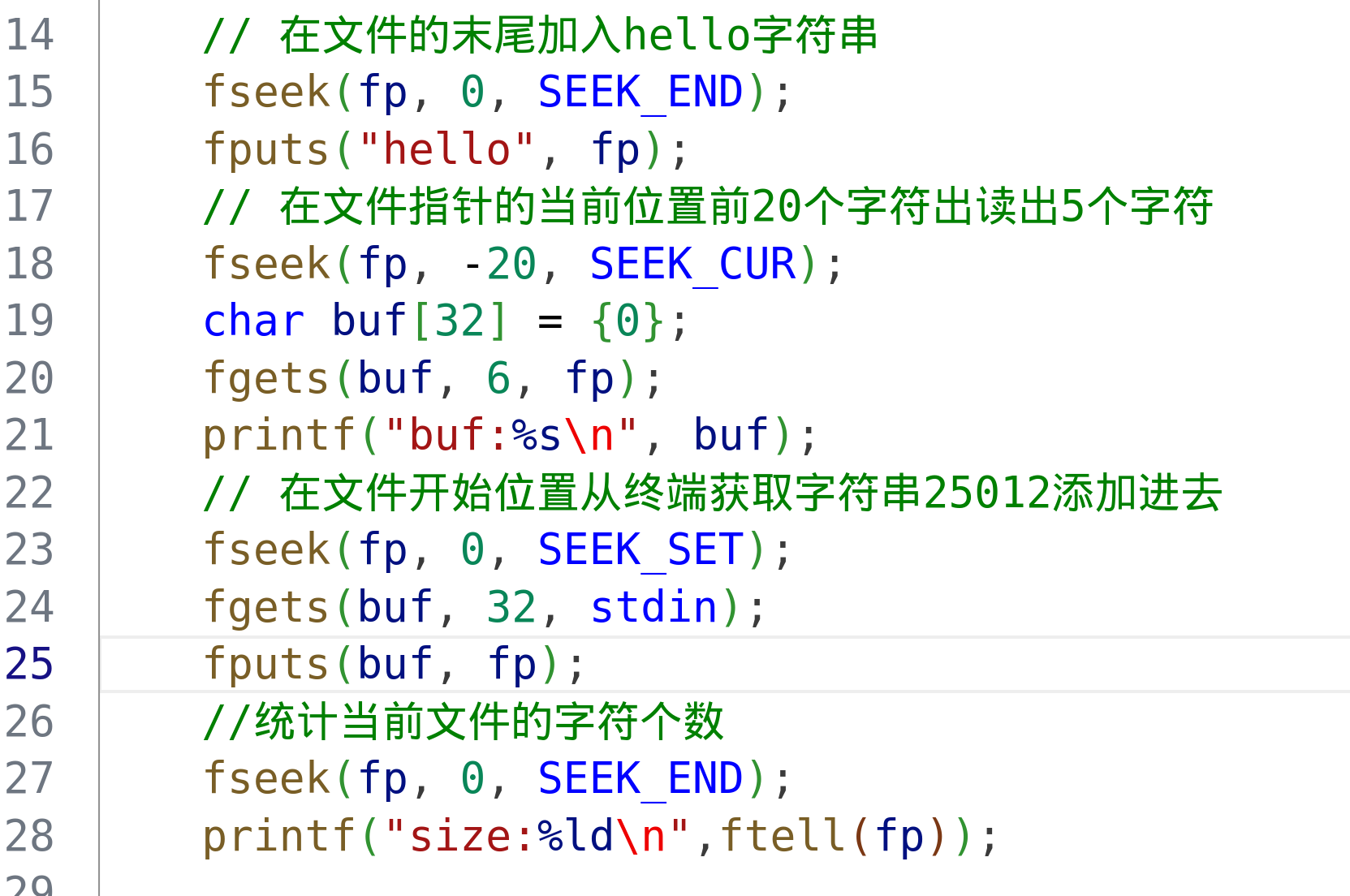
day1 一、标准IO 1.概念 在C库中定义的一组用于输入输出的函数 2.特点 (1).通过缓冲机制减少系统调用,提高效率 (2.)围绕流进行操作,流用FILE *来描述(3).标准IO默认打开了三个流,stdin(标准输入)、stdout(…...

int 与 Integer 的区别详解
1. 本质区别 特性intInteger类型基本数据类型(Primitive)包装类(Wrapper Class)存储位置栈(或作为对象成员在堆中)堆(对象实例)默认值0null(可能导致 NullPointerExcept…...

Java面试黄金宝典39
1. SNMP、SMTP 协议 SNMP(简单网络管理协议) 定义:SNMP 是一种应用层协议,用于在 IP 网络中管理网络节点(如服务器、路由器、交换机等)。它允许网络管理员监控网络设备的状态、收集性能数据、进行故障诊断等操作。SNMP 基于 UDP 协议,采用轮询和事件驱动相结合的方式来收…...
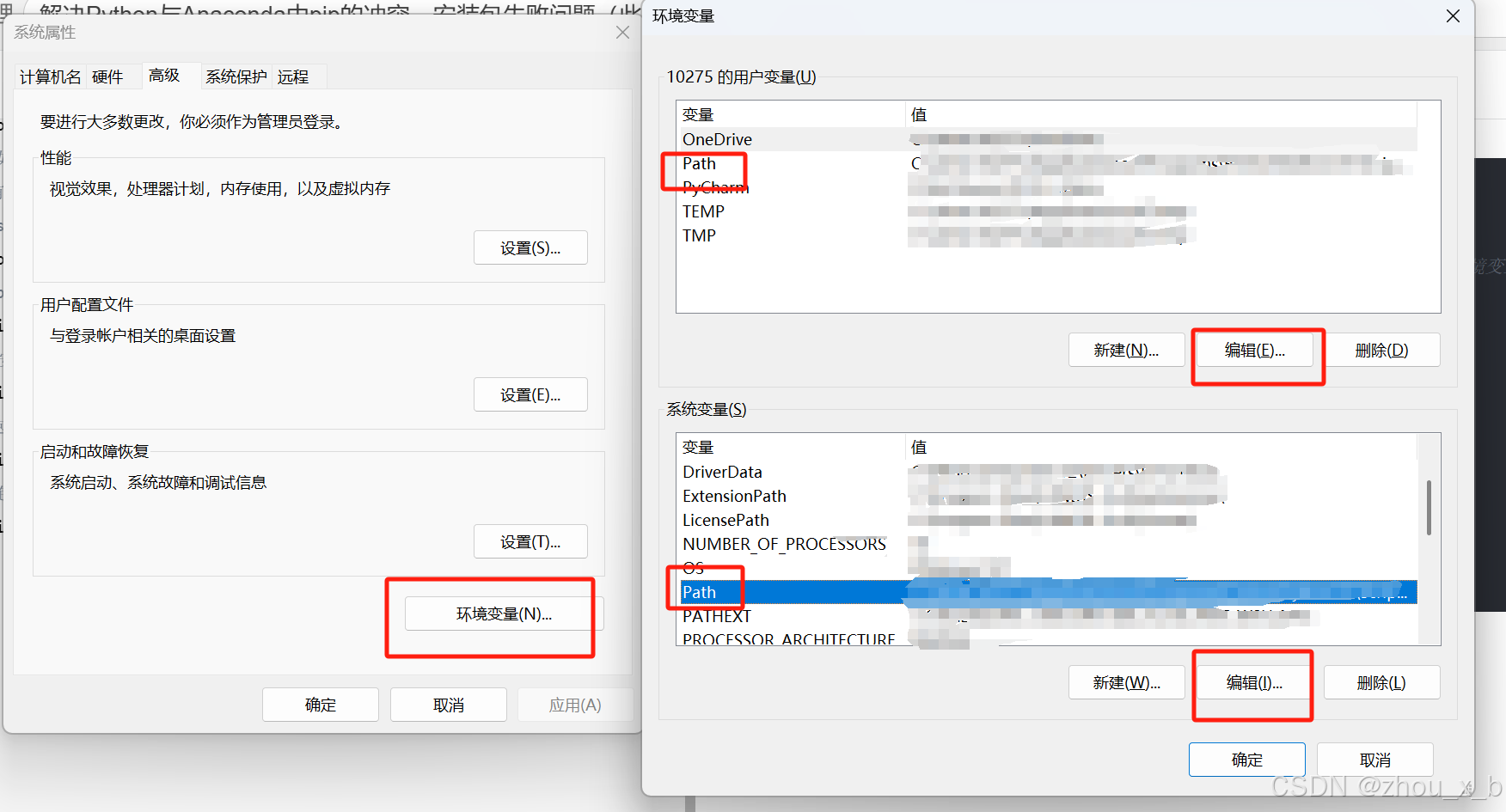
解决Python与Anaconda中pip的冲突,安装包失败问题(此应用无法在你电脑上运行,无法访问)
1、Anaconda安装在D盘 2、Python安装在C盘(当时刚换电脑,新电脑还未分盘,着急用python直接安装) 问题: (1)winr,cmd无法访问c盘下的pip,安装包失败。采用管理者身份&…...
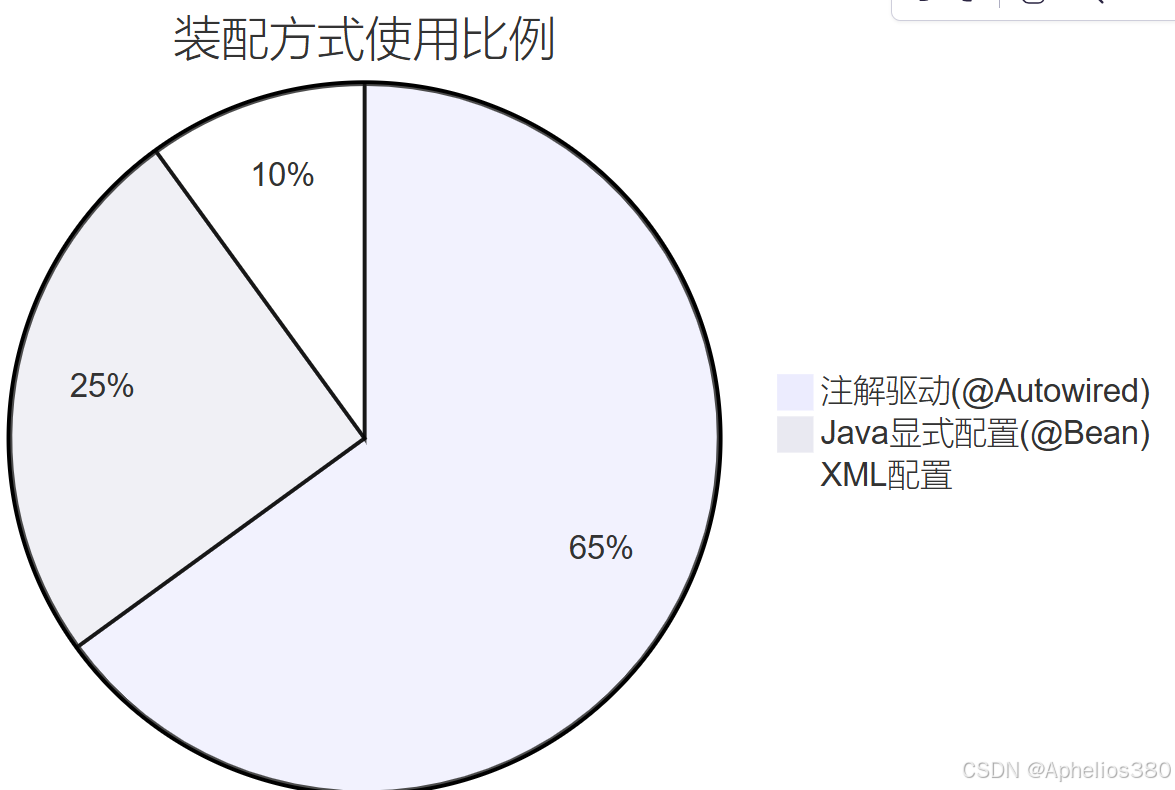
Java全栈面试宝典:JMM内存模型与Spring自动装配深度解析
目录 一、Java内存模型(JMM)核心原理 🔥 问题8:happens-before原则全景解析 JMM内存架构图 happens-before八大规则 线程安全验证案例 🔥 问题9:JMM解决可见性的三大武器 可见性保障机制 volatile双…...

对访问者模式的理解
对访问者模式的理解 一、场景二、不采用访问者模式1、代码2、特点 三、采用访问者模式1、代码2、特点 四、思考 一、场景 我们有一个图形系统,系统中有多种图形对象(如圆形、方形等),每种图形对象都有不同的属性和行为。现在需要对…...

医疗机构中核心业务相关的IT设备全面解析
一、引言 在医疗行业数字化转型的进程中,IT设备作为医疗机构核心业务运行的基础设施,其重要性愈发凸显。医疗机构的核心业务涵盖患者诊疗、临床管理、检验检测、影像诊断、药品管理、电子病历、医院信息系统(HIS)、实验室信息系统…...
)
【Vue】b站黑马视频学习笔记(导览)
Vue学习导览 1.Vue基础知识>> 2.组件>> 3.路由>> 4.路由案例-面经基础版>> 5. vuex>> 6.购物车案例>>...

AI前端组件库Ant DesIgn X
Ant Design X AI:体验新秩序 Ant Design 团队精心打造 RICH 设计范式,为 AI 界面提供卓越解决方案,引领智能交互新体验。 设计语言与理论 官网: Ant Design X - 轻松打造 AI 驱动的界面。 AI 设计范式 —— RICH 是我们在蚂蚁…...

【C++编程基础-关键字】:define和inline的区别
一、引言:开启探索之旅 在 C++ 编程的广阔天地中,define和inline就如同两把独特的钥匙,各自解锁着不同的代码优化与功能实现的大门。define作为 C/C++ 语言中的预处理指令,有着悠久的历史,它能够实现文本替换,在代码编译前就发挥着重要作用,为我们带来了诸如定义常量、…...
追踪大型语言模型的思维过程:提示词工程重要
追踪大型语言模型的思维过程:提示词工程重要 目录 追踪大型语言模型的思维过程:提示词工程重要**1. 分步思考能力:像人类一样打草稿****2. 跨语言概念词典:突破语言符号的束缚****3. 诗歌押韵规划:神经元提前预留韵脚****4. 编造专业解释:数据模式导致的“客服式回应”**…...
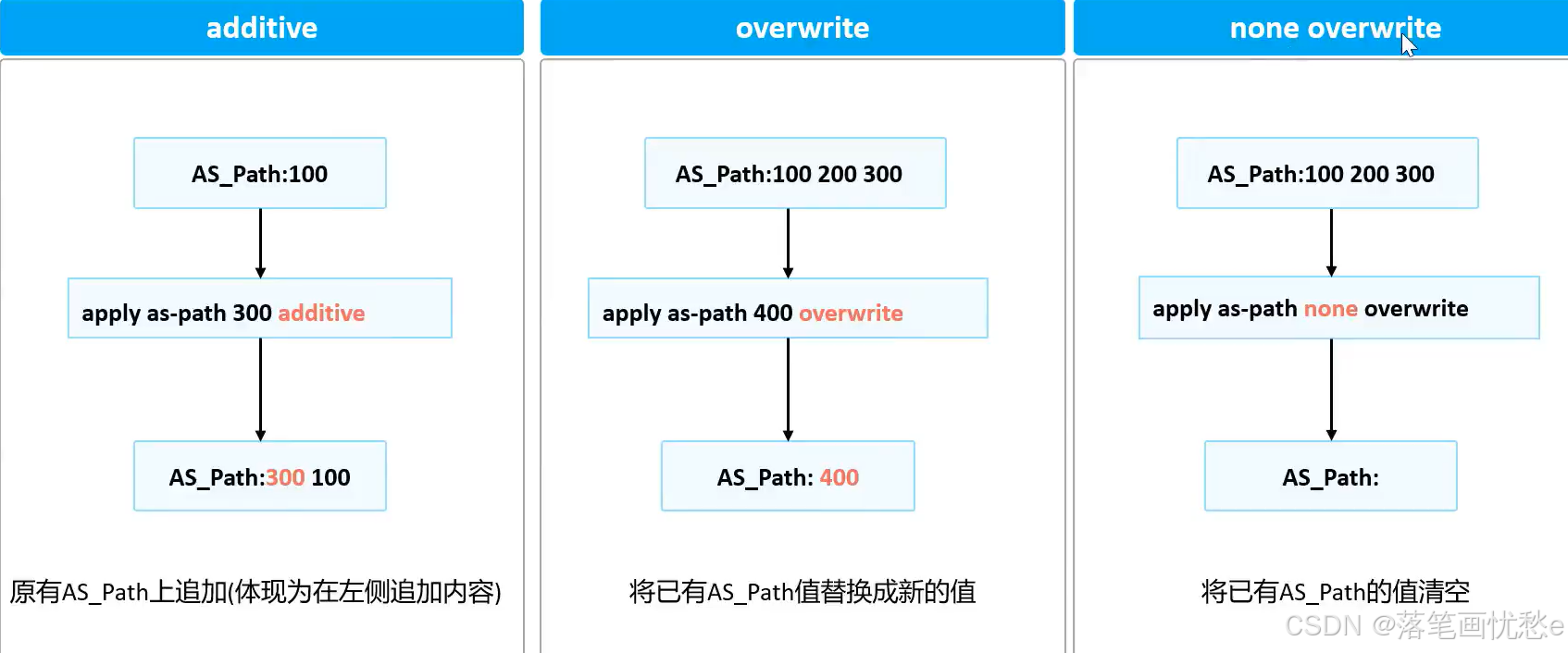
BGP路由协议之属性1
公认属性是所有 BGP 路由器都必须能够识别的属性 公认必遵 (Well-known Mandatory) : 必须包括在每个 Update 消息里公认任意 (Well-known Discretionary) : 可能包括在某些 Update 消息里。 可选属性不需要都被 BGP 路由器所识别 可选过渡(OptionalTransitive) : BGP 设备不…...
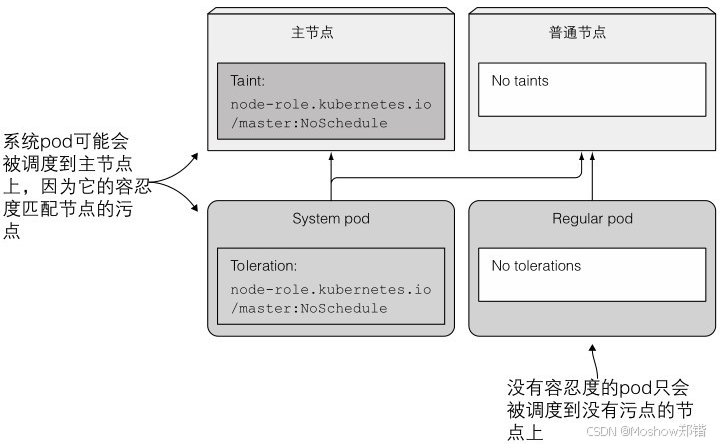
什么是 k8s 的 Taints(污点) 和 Tolerations(容忍度)
什么是 k8s 的 Taints(污点) 和 Tolerations(容忍度) 在 Kubernetes(K8s)中,Taints(污点)和 Tolerations(容忍度)用于影响 Pod 调度到节点的行为…...

C++类模板的运用
使用vector实现一个简单的本地注册登录系统 注册:将账号密码存入vector里面,注意防重复判断 登录:判断登录的账号密码是否正确 #include <iostream> #include <vector> #include <string> #include <algorithm>us…...

人工智能:深度学习关键技术与原理详解
深度学习作为机器学习的核心分支,通过构建多层神经网络实现对复杂数据的高效建模。其关键技术及原理可分为以下几个方面: 一、关键技术 神经网络结构 多层感知机(MLP):基础的前馈神经网络,通过全连接层堆叠…...
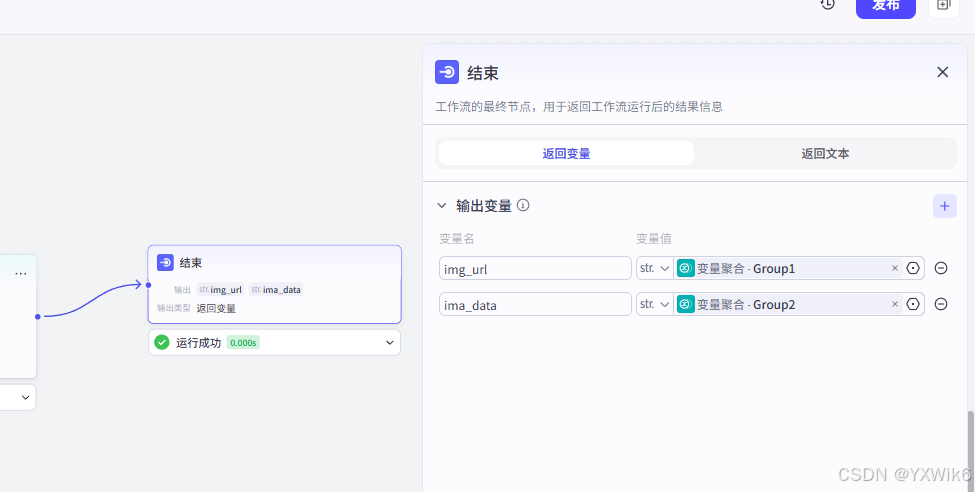
coze生成流程图和思维导图工作流
需求:通过coze平台实现生成流程图和思维导图,要求支持文档上传 最终工作流如下: 入参: 整合用户需求文件内容的工作流:https://blog.csdn.net/YXWik/article/details/147040071 选择器分发,不同的类型走…...
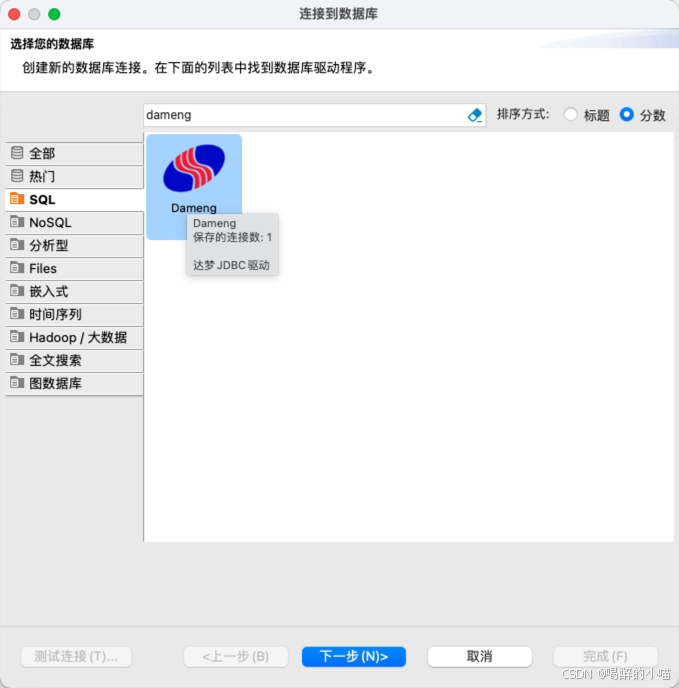
【数据库】达梦arm64安装
话不多说,快速开始~ 1.下载 进入官网: 产品下载 | 达梦在线服务平台 下载安装包。 选飞腾、鲲鹏都可以,都是arm架构的。我选择的是: 直接下载地址是https://download.dameng.com/eco/adapter/DM8/202502/dm8_20250117_HWarm920…...

AR 赋能儿童娱乐:剧本杀与寻宝小程序搭建秘籍
在科技飞速发展的当下,儿童娱乐领域正经历着一场创新变革。AR(增强现实)技术的融入,为儿童剧本杀与寻宝游戏带来了前所未有的沉浸式体验。通过搭建专属小程序,孩子们能够在虚拟与现实交织的世界中开启奇幻冒险。接下来…...

交换机可以代替路由器的功能吗
交换机在一定程度上可以承担部分路由器的功能,但不能完全代替路由器,原因如下: 1、工作层次不一样: a、交换机工作在数据链路层,主要功能是基于MAC地址(物理地址)进行数据帧的转发,…...
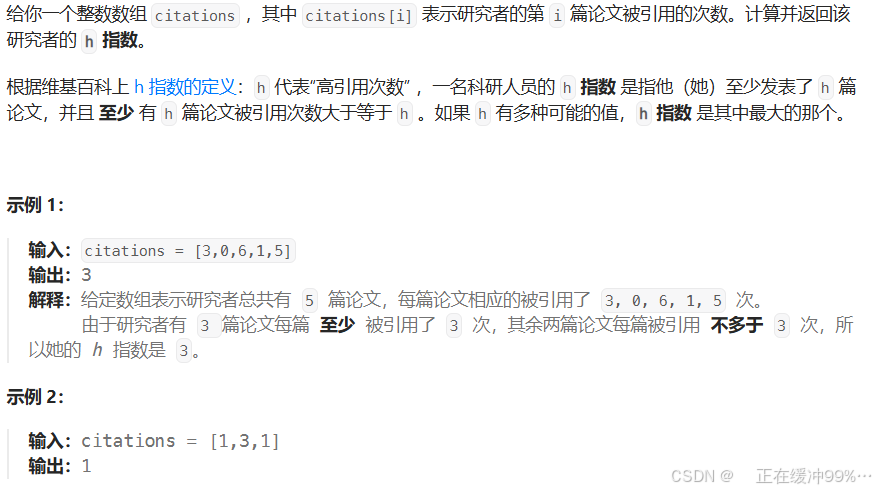
leetcode274.H指数
直接排序完后进行遍历 class Solution {public int hIndex(int[] citations) {Arrays.sort(citations);int result 0;for (int i citations.length-1; i >0; i--) {if(citations[i]>citations.length-i)resultcitations.length-i;elsebreak;}return result;} }...

人工智能基础知识详解:从概念到前沿技术与应用
在数字化浪潮席卷全球的今天,人工智能(Artificial Intelligence,简称AI)已不再是科技前沿的神秘概念,而是融入我们日常工作的实用工具。从智能语音助手到自动驾驶汽车,从医疗影像诊断到生成式艺术创作&…...

JavaScript | 对象
对象 JS中,对象是一组无序的相关属性和方法的集合,所有的事物都是对象,例如:字符串、数值、数组、函数等 对象是由属性与方法组成的 属性:事物的特征,在对象中用属性来表示(一般用名词)方法:…...

内网文件传输新体验,聊天、传输、自定义,一应俱全
Flix 是一款高效、便捷的跨平台局域网文件传输工具,支持 Windows、macOS、Android、iOS 和 Linux 等多种操作系统。它以简洁直观的聊天式界面为特色,让用户能够像发送消息一样轻松地传输文件,无需复杂的设置或登录。Flix 支持大文件和多种格式…...

Vue PDF Annotation plugin library online API examples
This article introduces the online version of the ElasticPDF API tutorial for the PDF annotation plug-in library in Vue projects. The API includes ① Export edited PDF data; ② Export annotations json data; ③ Reload old annotations; ④ Change files; ⑤ Se…...

Go 学习笔记 · 进阶篇 · 第一天:接口与多态
🐶Go接口与多态:继承没了,但自由炸裂! 最近翻 Go 的代码,突然看到这么一段: type Animal interface {Speak() string }我一愣,咦?这不就是 Java 里常见的“接口”吗? …...
C语言传参寄存器压栈流程总结
相关 《Linux函数调用栈的实现原理(X86)》 总结 rsp向低地址生长(栈顶),rbp记录旧值(栈底)。 intel x86测试,六个和六个以内的参数用寄存器传递。8个参数场景,6个用寄存…...

C盘清理——快速处理
C盘清理 | 快速处理 软件:小番茄C盘清理 https://ccleancdn.xkbrowser.com/cleanmaster/FanQieClean_13054_st.exe 前言:为什么需要专业的C盘清理工具? 作为一位长期与Windows系统打交道的技术博主,我深知C盘空间不足带来的痛苦…...

前端服务配置详解:从入门到实战
前端服务配置详解:从入门到实战 一、环境配置文件(.env) 1.1 基础结构 在项目根目录创建 .env 文件: # 开发环境 VUE_APP_API_BASE_URL http://localhost:3000/api VUE_APP_VERSION 1.0.0# 生产环境(.env.produc…...