[实战] 天线阵列波束成形原理详解与仿真实战(完整代码)
天线阵列波束成形原理详解与仿真实战
1. 引言
在无线通信、雷达和声学系统中,波束成形(Beamforming)是一种通过调整天线阵列中各个阵元的信号相位和幅度,将电磁波能量集中在特定方向的技术。其核心目标是通过空间滤波增强目标方向的信号,同时抑制干扰和噪声。本文将从阵列模型、波束成形原理、数学推导及波束增益计算等方面展开详细分析。
2. 天线阵列模型
2.1 均匀线性阵列(ULA)
假设一个由 N N N个各向同性阵元组成的均匀线性阵列(Uniform Linear Array, ULA),阵元间距为 d d d。以第一个阵元为参考点,第 n n n个阵元的位置为:
x n = ( n − 1 ) d ( n = 1 , 2 , … , N ) x_n = (n-1)d \quad (n=1,2,\dots,N) xn=(n−1)d(n=1,2,…,N)
2.2 远场假设
当信号源距离阵列足够远时,入射波可视为平面波。假设信号入射方向与阵列法线方向的夹角为 θ \theta θ,则相邻阵元间的相位差为:
Δ ϕ = 2 π d sin θ λ \Delta \phi = \frac{2\pi d \sin\theta}{\lambda} Δϕ=λ2πdsinθ
其中 λ \lambda λ为波长。
3. 波束成形的基本原理
3.1 阵列响应向量
对于入射角度 θ \theta θ,阵列的响应向量(导向向量)为:
a ( θ ) = [ 1 , e j Δ ϕ , e j 2 Δ ϕ , … , e j ( N − 1 ) Δ ϕ ] T \mathbf{a}(\theta) = \left[ 1, e^{j\Delta\phi}, e^{j2\Delta\phi}, \dots, e^{j(N-1)\Delta\phi} \right]^T a(θ)=[1,ejΔϕ,ej2Δϕ,…,ej(N−1)Δϕ]T
3.2 加权合成
通过为每个阵元分配复权重 w n w_n wn,合成输出信号为:
y ( t ) = w H x ( t ) = ∑ n = 1 N w n ∗ x n ( t ) y(t) = \mathbf{w}^H \mathbf{x}(t) = \sum_{n=1}^N w_n^* x_n(t) y(t)=wHx(t)=n=1∑Nwn∗xn(t)
其中 w = [ w 1 , w 2 , … , w N ] T \mathbf{w} = [w_1, w_2, \dots, w_N]^T w=[w1,w2,…,wN]T为权重向量, x ( t ) \mathbf{x}(t) x(t)为接收信号向量。
3.3 波束方向图
阵列的波束方向图(Array Factor, AF)定义为:
A F ( θ ) = w H a ( θ ) = ∑ n = 1 N w n ∗ e j ( n − 1 ) Δ ϕ AF(\theta) = \mathbf{w}^H \mathbf{a}(\theta) = \sum_{n=1}^N w_n^* e^{j(n-1)\Delta\phi} AF(θ)=wHa(θ)=n=1∑Nwn∗ej(n−1)Δϕ
4. 数学推导:波束成形的实现
4.1 相位补偿法
若需使主瓣对准方向 θ 0 \theta_0 θ0,需补偿相邻阵元间的相位差。权重向量设计为:
w n = e − j ( n − 1 ) 2 π d sin θ 0 λ w_n = e^{-j(n-1)\frac{2\pi d \sin\theta_0}{\lambda}} wn=e−j(n−1)λ2πdsinθ0
此时,方向图在 θ 0 \theta_0 θ0处达到最大值。
4.2 波束方向图分析
代入权重后,方向图简化为:
A F ( θ ) = ∑ n = 0 N − 1 e j n 2 π d λ ( sin θ − sin θ 0 ) AF(\theta) = \sum_{n=0}^{N-1} e^{j n \frac{2\pi d}{\lambda} (\sin\theta - \sin\theta_0)} AF(θ)=n=0∑N−1ejnλ2πd(sinθ−sinθ0)
利用等比数列求和公式:
A F ( θ ) = sin ( N ⋅ π d λ ( sin θ − sin θ 0 ) ) sin ( π d λ ( sin θ − sin θ 0 ) ) AF(\theta) = \frac{\sin\left( N \cdot \frac{\pi d}{\lambda} (\sin\theta - \sin\theta_0) \right)}{\sin\left( \frac{\pi d}{\lambda} (\sin\theta - \sin\theta_0) \right)} AF(θ)=sin(λπd(sinθ−sinθ0))sin(N⋅λπd(sinθ−sinθ0))
4.3 主瓣与栅瓣
- 主瓣宽度:与 N N N成反比, N N N越大波束越窄。
- 栅瓣条件:当 d / λ > 0.5 d/\lambda > 0.5 d/λ>0.5时,可能出现多个主瓣(栅瓣)。
5. 波束增益计算
5.1 方向性系数
波束增益 G G G定义为最大辐射强度与各向同性辐射器的比值:
G = 4 π ∣ A F ( θ 0 ) ∣ 2 ∫ 0 2 π ∫ 0 π ∣ A F ( θ , ϕ ) ∣ 2 sin θ d θ d ϕ G = \frac{4\pi |AF(\theta_0)|^2}{\int_0^{2\pi} \int_0^{\pi} |AF(\theta,\phi)|^2 \sin\theta d\theta d\phi} G=∫02π∫0π∣AF(θ,ϕ)∣2sinθdθdϕ4π∣AF(θ0)∣2
对于均匀加权ULA,最大增益近似为:
G ≈ N ⋅ ( 4 π d λ ) G \approx N \cdot \left( \frac{4\pi d}{\lambda} \right) G≈N⋅(λ4πd)
5.2 阵元间距影响
- 最优间距:通常取 d = λ / 2 d = \lambda/2 d=λ/2,以避免栅瓣并最大化增益。
- 过密阵元:间距过小导致互耦效应,降低效率。
5.3 实际增益公式
考虑效率 η \eta η后,实际增益为:
G r e a l = η ⋅ N ⋅ G e l e m e n t G_{real} = \eta \cdot N \cdot G_{element} Greal=η⋅N⋅Gelement
其中 G e l e m e n t G_{element} Gelement为单个阵元的增益。
6. 影响波束增益的关键因素
- 阵元数量(N):增益随 N N N线性增加。
- 权重设计:非均匀加权(如切比雪夫加权)可降低旁瓣,但略微减小主瓣增益。
- 频率与带宽:宽带信号需考虑色散效应。
- 阵元方向性:若阵元非各向同性,总增益需乘以阵元方向图。
- 扫描角度:扫描至端射方向( θ = 9 0 ∘ \theta = 90^\circ θ=90∘)时增益下降。
7. 扩展:平面阵列与二维波束成形
对于 M × N M \times N M×N平面阵列,导向向量为:
a ( θ , ϕ ) = a x ( θ , ϕ ) ⊗ a y ( θ , ϕ ) \mathbf{a}(\theta, \phi) = \mathbf{a}_x(\theta, \phi) \otimes \mathbf{a}_y(\theta, \phi) a(θ,ϕ)=ax(θ,ϕ)⊗ay(θ,ϕ)
其中 ⊗ \otimes ⊗表示Kronecker积。增益提升至 M × N M \times N M×N倍。
8. 仿真
这里直接提供仿真代码和仿真结果:
先说结果,采用32阵元的阵列进行仿真,阵列布局如图如下,阵元间隔0.8 λ \lambda λ

仿真在俯仰角60度时,方位角指向不同方向的波束情况如下:

完整代码作为福利,如下:
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
Created on Tue Apr 8 22:13:36 2025@author: neol
"""import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3Dplt.close('all')
# 设置全局字体为支持中文的字体
plt.rcParams['font.sans-serif'] = ['WenQuanYi Micro Hei'] # 黑体
# 解决负号显示问题
plt.rcParams['axes.unicode_minus'] = False# 参数设置
c = 299792458 # 光速
freq = 1268.52e6 # 频率
wavelength = c / freq # 波长
d = wavelength*0.7 # 阵元间距
N = 6 # 网格尺寸(6x6)
theta_res = 1 # 角度分辨率(度)# 生成阵元位置(四角空缺)
positions = []
for i in range(N):for j in range(N):# 排除四个角落(0,0),(0,5),(5,0),(5,5)if (i==0 and j==0) or (i==0 and j==5) or (i==5 and j==0) or (i==5 and j==5):continuepositions.append([i*d - (N-1)*d/2, j*d - (N-1)*d/2, 0]) # 中心对齐positions = np.array(positions)
num_elements = len(positions)
print(f"有效阵元数量: {num_elements}")# 生成12个目标方向(方位角均匀分布)
num_beams = 12
phi_targets = np.linspace(0, 2*np.pi, num_beams, endpoint=False)
# theta_target = np.pi/2 # 固定俯仰角为90度(水平面)
pitch = 60
theta_target = np.radians(pitch) # 俯仰角设置# 波束方向图计算函数
def calculate_beam_pattern(weights, positions, wavelength):theta = np.linspace(0, np.pi, 181)phi = np.linspace(0, 2*np.pi, 361)THETA, PHI = np.meshgrid(theta, phi)# 转换为直角坐标X = np.sin(THETA) * np.cos(PHI)Y = np.sin(THETA) * np.sin(PHI)Z = np.cos(THETA)pattern = np.zeros_like(THETA, dtype=np.complex128)# 计算每个阵元的贡献for i, pos in enumerate(positions):phase_shift = 2*np.pi/wavelength * (pos[0]*X + pos[1]*Y + pos[2]*Z)pattern += weights[i] * np.exp(1j*phase_shift)return 20*np.log10(np.abs(pattern))# 创建绘图
fig = plt.figure(figsize=(18,12))
fig.suptitle('32-Element Array Beam Patterns (12 Directions)', fontsize=16)# 为每个波束生成权重并绘图
for beam_idx in range(num_beams):# 当前目标方向phi_target = phi_targets[beam_idx]# 计算导向矢量steering_vector = np.zeros(num_elements, dtype=np.complex128)for i, pos in enumerate(positions):phase = 2*np.pi/wavelength * (pos[0]*np.sin(theta_target)*np.cos(phi_target) +pos[1]*np.sin(theta_target)*np.sin(phi_target) +pos[2]*np.cos(theta_target))steering_vector[i] = np.exp(-1j*phase)# 归一化权重weights = steering_vector / np.linalg.norm(steering_vector)# 计算方向图pattern = calculate_beam_pattern(weights, positions, wavelength)# 转换为极坐标并绘图ax = fig.add_subplot(3, 4, beam_idx+1, projection='polar')ax.set_theta_offset(np.pi/2)ax.set_theta_direction(-1)#标志主瓣方向r_max = 15r_min = -40ax.plot([phi_target, phi_target], [r_min, r_max], color='red', linestyle='--', linewidth=1.5, alpha=0.8)phi_plot = np.linspace(0, 2*np.pi, 361)theta_plot = np.linspace(0, np.pi, 181)# 提取水平面方向图horizontal_cut = pattern[:, pitch] # theta=90度# 绘制极坐标图ax.plot(phi_plot, horizontal_cut, linewidth=1.5)ax.set_title(f'Beam {beam_idx+1}\nAzimuth={np.degrees(phi_target):.1f}°\nPitch={pitch:.1f}°', pad=20)ax.set_rlim(r_min, r_max)ax.grid(True)plt.tight_layout()
plt.show()# 绘制阵列几何布局
plt.figure(figsize=(8,6))
plt.scatter(positions[:,0]/wavelength, positions[:,1]/wavelength, s=50, c='r')
plt.title('Array Geometry (Wavelength Normalized)')
plt.xlabel('X (λ)')
plt.ylabel('Y (λ)')
plt.grid(True)
plt.axis('equal')
plt.show()
9. 结论
天线阵列波束成形通过精确控制各阵元的相位和幅度,实现了信号的空间选择性。其性能直接取决于阵元数量、间距及权重设计。理解其数学本质和增益限制因素,对5G Massive MIMO、雷达等系统设计至关重要。
相关文章:
[实战] 天线阵列波束成形原理详解与仿真实战(完整代码)
天线阵列波束成形原理详解与仿真实战 1. 引言 在无线通信、雷达和声学系统中,波束成形(Beamforming)是一种通过调整天线阵列中各个阵元的信号相位和幅度,将电磁波能量集中在特定方向的技术。其核心目标是通过空间滤波增强目标方…...

Android开发okhttp添加头部参数
Android开发okhttp添加头部参数或者是头文件 private static class RequestHeaderInterceptor implements Interceptor {Overridepublic Response intercept(Chain chain) throws IOException {Request original chain.request();//添加头部信息Request request original.new…...
Halcon图像采集
Halcon是一款强大的机器视觉软件,结合C#可以开发出功能完善的视觉应用程序。 基本设置 确保已经安装了Halcon和Halcon的.NET库(HalconDotNet)。 1. 添加引用 在C#项目中,需要添加对HalconDotNet.dll的引用: 右键点…...

自动提取pdf公式 ➕ 输出 LaTeX
# 创建打包脚本的主内容 script_content """ from doc2x.extract_formula import extract_formula_imgs from pix2text import Pix2Text from PIL import Image import osdef main():pdf_path "your_file.pdf" # 将你的PDF命名为 your_file.pdf 并…...
安卓开发中的Activity之间的通信使用详解)
(十)安卓开发中的Activity之间的通信使用详解
在 Android 开发中,Activity 之间的通信是非常常见且核心的功能之一,常见的方式包括: 使用显式 Intent 传递数据使用隐式 Intent 实现跨组件调用使用 startActivityForResult(或新版 Activity Result API)回传数据传递…...

python 浅拷贝copy与深拷贝deepcopy 理解
一 浅拷贝与深拷贝 1. 浅拷贝 浅拷贝只复制了对象本身(即c中的引用)。 2. 深拷贝 深拷贝创建一个新的对象,同时也会创建所有子对象的副本,因此新对象与原对象之间完全独立。 二 代码理解 1. 案例一 a 10 b a b 20 print…...
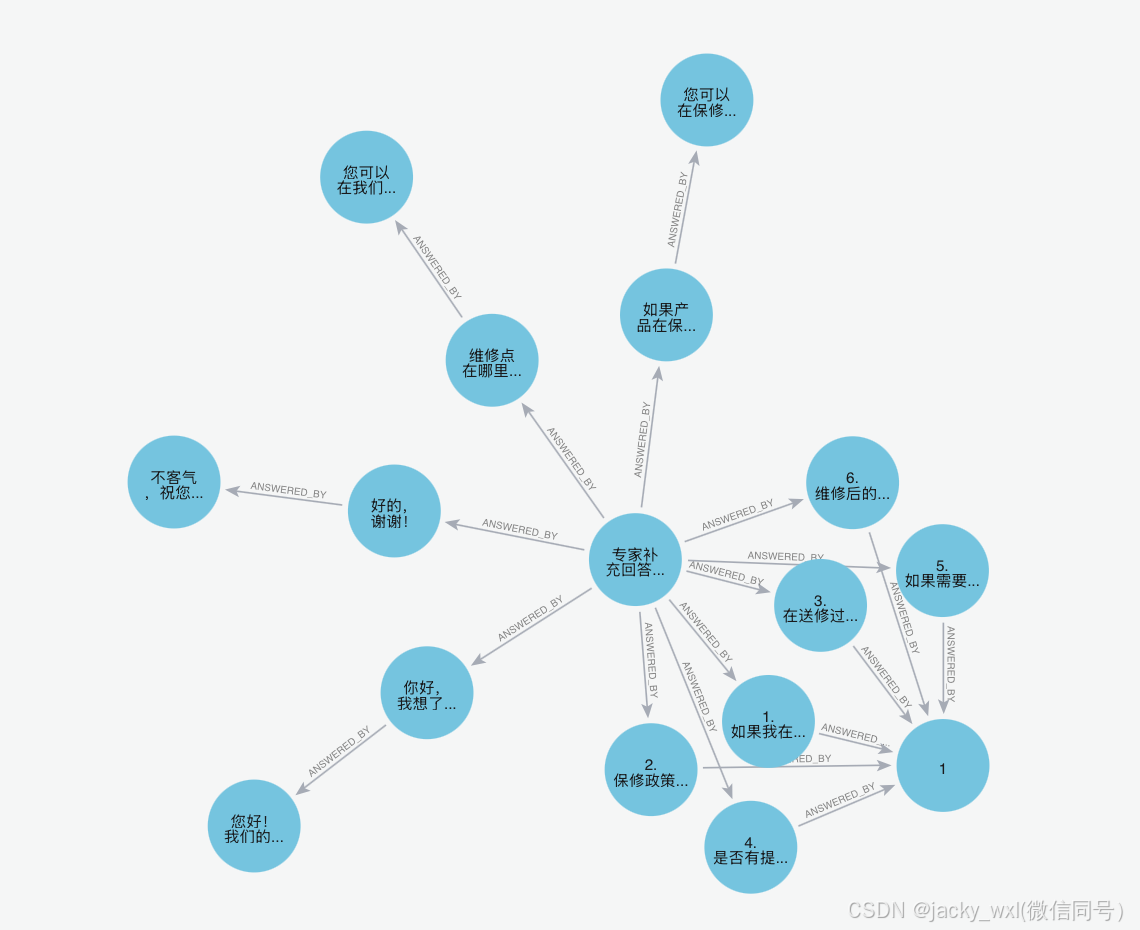
基于neo4j存储知识树-mac
1、安装jdk21 for mac(jdk-21_macos-aarch64_bin.dmg) 2、安装neo4j for mac(neo4j-community-5.26.0-unix.tar.gz) 3、使用默认neo4j/neo4j登录http://localhost:7474 修改登录密码,可以使用生成按钮生成密码,连接数据库,默认设置为neo4j…...
 [2025.04.07])
Tiktok 关键字 视频及评论信息爬虫(1) [2025.04.07]
🙋♀️Tiktok APP的基于关键字检索的视频及评论信息爬虫共分为两期,希望对大家有所帮助。 第一期见下文。 第二期:基于视频URL的评论信息爬取 1. Node.js环境配置 首先配置 JavaScript 运行环境(如 Node.js)&#x…...

基于人工智能的高中教育评价体系重构研究
基于人工智能的高中教育评价体系重构研究 一、引言 1.1 研究背景 在科技飞速发展的当下,人工智能技术已广泛渗透至各个领域,教育领域亦不例外。人工智能凭借其强大的数据处理能力、智能分析能力和个性化服务能力,为教育评价体系的创新与发…...
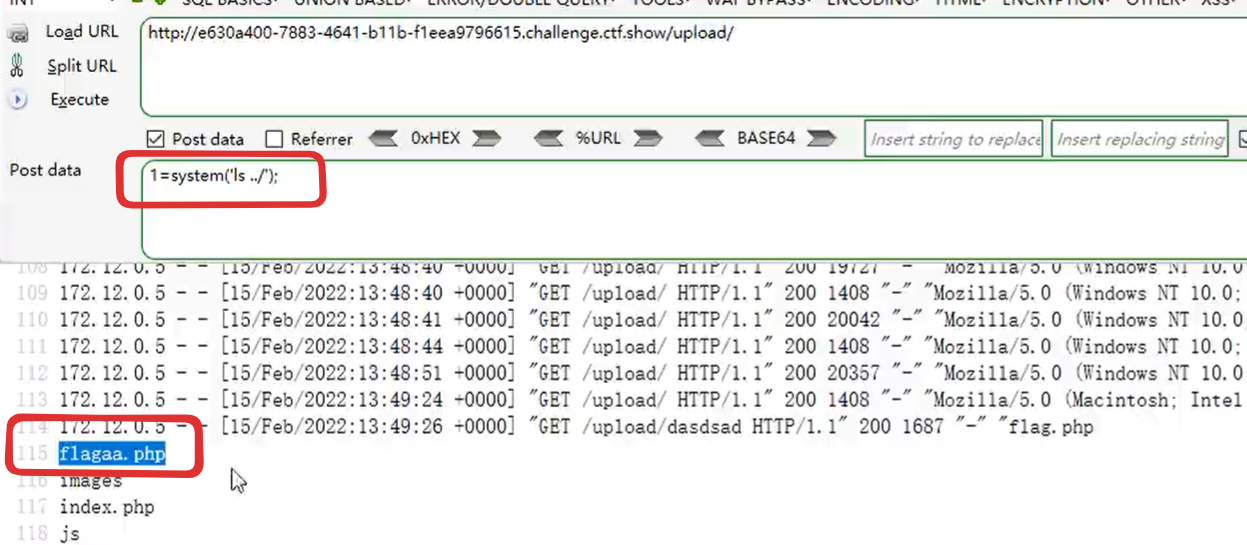
【学习笔记】文件上传漏洞--二次渲染、.htaccess、变异免杀
目录 第十二关 远程包含地址转换 第十三关 突破上传删除 条件竞争 第十四关 二次渲染 第十五关 第十六关 第十七关 .htaccess 第十八关 后门免杀 第十九关 日志包含 第十二关 远程包含地址转换 延续第十一关,加一个文件头,上传成功,…...

C++ 基础进阶
C 基础进阶 内容概述: 函数重载:int add(int x, inty);,long long add(long long x, long long y);,double add(double x, double y);模板函数:template<typename T> 或 template<class T>结构体&#x…...

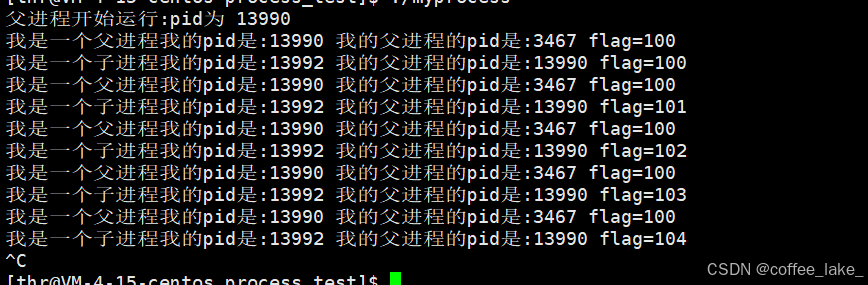
【OS】Process Management(3)
《计算机操作系统(第三版)》(汤小丹)学习笔记 文章目录 5、进程通信(Inter-Process Communication)5.1、进程通信的类型5.1.1、共享存储器系统(Shared Memory System)5.1.2、消息传递…...
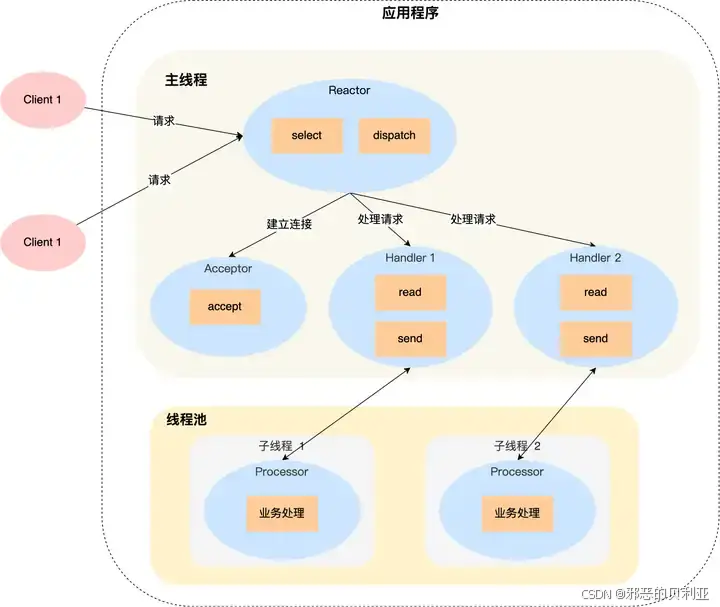
单reactor实战
前言:reactor作为一种高性能的范式,值得我们学习 本次目标 实现一个基于的reactor 具备echo功能的服务器 核心组件 Reactor本身是靠一个事件驱动的框架,无疑引出一个类似于moduo的"EventLoop "以及boost.asio中的context而言,不断…...
初阶C++笔记第一篇:C++基础语法
虽然以下大多数知识点都在C语言中学过,但还是有一些知识点和C语言不同,比如:代码格式、头文件、关键字、输入输出、字符串类型等... 1. 初识C 1.1 第一个C程序 编写C分为4个步骤: 创建项目创建文件编写代码运行程序 C的第一条…...
)
java基础 流(Stream)
Stream Stream 的核心概念核心特点 Stream 的操作分类中间操作(Intermediate Operations)终止操作(Terminal Operations) Stream 的流分类顺序流(Sequential Stream)并行流(Parallel Stream&…...

【AI】prompt engineering
prompt engineering ## prompt engineering ## prompt engineering ## prompt engineering 一、定义 Prompt 工程(Prompt Engineering)是指在使用语言模型(如 ChatGPT、文心一言等)等人工智能工具时,设计和优化输入提…...
无需libpacp库,BPF指令高效捕获指定数据包
【环境】无libpacp库的Linux服务器 【要求】高效率读取数据包,并过滤指定端口和ip 目前遇到两个问题 一是手写BPF,难以兼容,有些无法正常过滤二是性能消耗问题,尽可能控制到1% 大方向:过滤数据包要在内核层处理&…...
_36)
LeetCode算法题(Go语言实现)_36
题目 给定一个二叉树的根节点 root ,和一个整数 targetSum ,求该二叉树里节点值之和等于 targetSum 的 路径 的数目。 路径 不需要从根节点开始,也不需要在叶子节点结束,但是路径方向必须是向下的(只能从父节点到子节点…...
react实现上传图片到阿里云OSS以及问题解决(保姆级)
一、优势 提高上传速度:前端直传利用了浏览器与 OSS 之间的直接连接,能够充分利用用户的网络带宽。相比之下,后端传递文件时,文件需要经过后端服务器的中转,可能会受到后端服务器网络环境和处理能力的限制,…...

无法看到新安装的 JDK 17
在 Linux 系统中使用 update-alternatives --config java 无法看到新安装的 JDK 17,可能是由于 JDK 未正确注册到系统备选列表中。 一、原因分析 JDK 未注册到 update-alternatives update-alternatives 工具需要手动注册 JDK 路径后才能识别新版本。如果仅安装 JDK…...
一次倒序遍历)
LeetCode 3396.使数组元素互不相同所需的最少操作次数:O(n)一次倒序遍历
【LetMeFly】3396.使数组元素互不相同所需的最少操作次数:O(n)一次倒序遍历 力扣题目链接:https://leetcode.cn/problems/minimum-number-of-operations-to-make-elements-in-array-distinct/ 给你一个整数数组 nums,你需要确保数组中的元素…...
)
Vue2 快速过度 Vue3 教程 (后端学习)
隔好长一段时间没有写文章了,因为最近公司一个项目进度很赶,导致一直加班,没有时间空出来学习新的东西,这次趁着周末,赶紧补一下之前落下的一直想重新学一下整个大前端生态的想法,这次写一篇自己学习Vue3的…...

供应链管理-职业规划:数字化供应链管理专家 / 供应链管理商业模式专家 / 供应链管理方案专家
一、背景阐述 依据联合国产业分类标准,工业体系被细致划分为41个工业大类、207个工业中类以及666个工业小类。中国凭借其独特的产业布局,成为全球唯一一个全面涵盖所有这些门类的国家,成功构建起独立且完备的现代工业体系。这一辉煌成就&…...

无状态版的DHCPv6是不是SLAAC? 笔记250405
无状态版的DHCPv6是不是SLAAC? 笔记250405 无状态版 DHCPv6 不是 SLAAC,但二者在 IPv6 网络中可协同工作。以下是核心区别与协作关系: 本质区别 特性SLAAC无状态 DHCPv6主要功能生成 IPv6 地址(基于路由器通告的前缀)分发 DNS、…...

遍历算法及其应用详解
李升伟 整理 什么是遍历? 遍历是指按照某种规则或顺序,系统地访问数据结构(如树、图等)中的每个节点一次且仅一次的过程。遍历是算法设计中的基本操作,用于访问、检查或修改数据结构中的所有元素。 主要遍历算法 1…...
Python 字典和集合(常见的映射方法)
本章内容的大纲如下: 常见的字典方法 如何处理查找不到的键 标准库中 dict 类型的变种set 和 frozenset 类型 散列表的工作原理 散列表带来的潜在影响(什么样的数据类型可作为键、不可预知的 顺序,等等) 常见的映射方法 映射类型…...

基于大模型的ALS预测与手术优化系统技术方案
目录 技术方案文档:基于大模型的ALS预测与手术优化系统1. 数据预处理与特征工程模块流程图伪代码2. 多模态融合预测模型模型架构图伪代码3. 术中实时监测与动态干预系统系统流程图伪代码4. 统计验证与可解释性模块验证流程图伪代码示例(SHAP分析)5. 健康教育与交互系统系统架…...

创建一个简单的HTML游戏站
创建一个简单的HTML游戏站涉及多个步骤,包括规划网站结构、设计用户界面、编写游戏逻辑以及测试和部署。下面是一个详细的步骤指南: 1. 规划网站结构 确定目标受众:了解你的目标用户群体。选择游戏类型:决定你要开发的游戏类型&…...
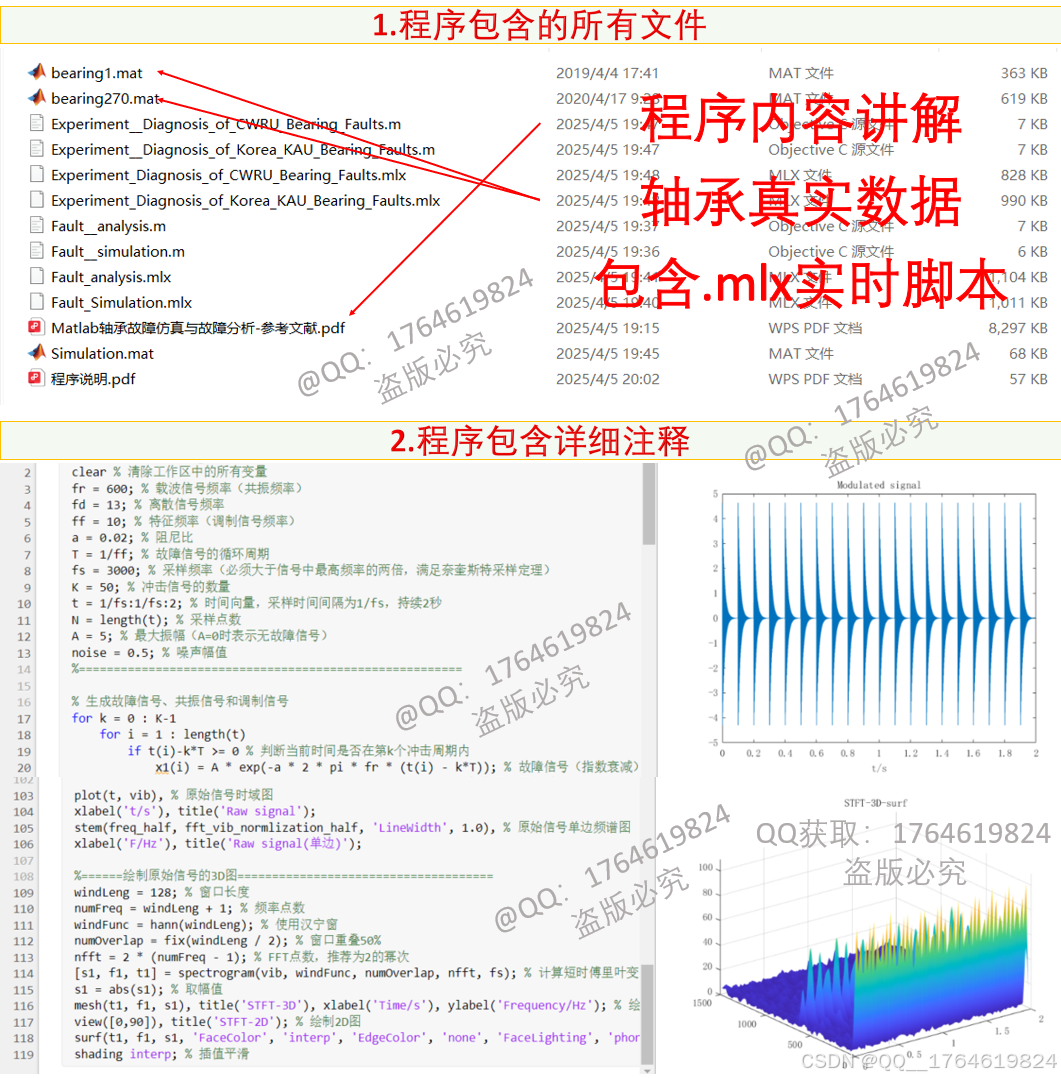
Matlab轴承故障信号仿真与故障分析
1.摘要 本文介绍了一个基于Matlab的轴承故障信号仿真与分析程序,旨在模拟和分析轴承内圈故障信号的特征。程序首先通过生成故障信号、共振信号和调制信号,添加噪声和离散化处理,构建模拟的振动信号,并保存相关数据。通过快速傅里…...
Linux 进程 | 概念 / 特征 / 状态 / 优先级 / 空间
注: 本文为 “Linux 进程” 相关文章合辑。 未整理去重。 Linux 进程概念(精讲) A little strawberry 于 2021-10-15 10:23:55 发布 基本概念 课本概念:程序的一个执行实例,正在执行的程序等。 内核观点ÿ…...