自动驾驶的未来:多模态感知融合技术最新进展
作为自动驾驶领域的专业人士,我很高兴与大家分享关于多模态感知融合技术的前沿研究和实践经验。在迅速发展的自动驾驶领域,多模态感知融合已成为提升系统性能的关键技术。本文将深入探讨基于摄像头和激光雷达的多模态感知融合技术,重点关注最新的融合架构、应用场景和未来发展趋势。

1、多模态融合的基础与重要性
自动驾驶系统通常配备多种传感器以获取周围环境的全面信息。单一传感器的感知能力有限,而多模态融合技术通过结合不同传感器的优势,显著提升系统的感知精度和鲁棒性。
在复杂的城市环境中,摄像头提供丰富的视觉语义信息,而激光雷达则提供精确的距离和三维结构信息。将这两种互补传感器结合起来,可以构建更加完整、准确的环境表示,为自动驾驶的决策规划提供有力支持。
2、最新融合架构与方法
BEV空间下的多模态融合技术
BEV(Bird's Eye View,鸟瞰图)作为一种有效的环境表示方法,能够提供车辆周围环境的俯视视角。BEV空间通过将三维环境信息投影到二维平面上,简化了环境表示的复杂度,便于后续的处理和决策。
BEVFusion架构
BEVFusion是一种激光雷达-相机融合的深度网络框架,旨在更好地利用这两种传感器模式的信息。该框架设计了两个独立的处理流:
- 相机流:处理视觉图像数据,提取语义信息
- 激光雷达流:处理点云数据,提取精确的距离和位置信息
这两个独立的流分别处理原始输入,并将其编码到同一BEV空间中。随后,通过一个简单的融合模块将两个流的特征进行融合,最终传递到任务预测头架构中。
在nuScenes验证集和测试集上,BEVFusion取得了优异的表现,超越了多种传统的激光雷达-摄像机融合方法。
AutoAlignV2技术
AutoAlignV2是建立在AutoAlign之上的更快、更强的多模态3D检测框架。它采用稀疏的可学习采样点进行跨模态关系建模,提高了对校准误差的容错能力,并大大加快了跨模态特征聚合的速度。
与BEVFusion相比,AutoAlignV2在计算效率和检测精度上均有所提升,特别适用于对实时性要求较高的自动驾驶场景。
多模态融合Transformer架构
传统的基于几何的传感器融合对物体检测和运动预测等感知任务显示出巨大希望。然而,对于实际驾驶任务,3D场景的全局上下文是关键,例如交通灯状态的变化可能影响几何上远离该交通灯的车辆的行为。
TransFuser架构
TransFuser是一种创新的多模态融合变换器,通过使用注意力机制整合图像和激光雷达表示。与基于几何的融合相比,TransFuser实现了最先进的驾驶性能,同时将碰撞减少了76%。
TransFuser的独特性在于它直接将3D场景的全局上下文推理集成到不同模态的特征提取层中。这种方法能够有效处理复杂城市场景中的挑战,如在交叉口处理交通时,需要考虑多个动态智能体和交通灯之间的相互作用。
3、多模态融合方法的分类与实现
根据融合发生的阶段,多模态融合可分为三种主要类型:
早期融合 (Early Fusion)
早期融合在数据预处理阶段进行,直接合并不同传感器的原始数据。这种方法的优势在于能够保留所有原始信息,但计算成本较高。
在早期融合中,常见的做法是将激光雷达点云投影到图像平面,或将图像信息投影到激光雷达的三维空间中。此类融合常用于2D和3D物体检测、运动预测和深度估计等任务。
中间融合 (Middle Fusion)
中间融合在特征提取层面进行,将不同传感器提取的特征进行整合。TransFuser就属于这一类型,它通过transformer的注意力机制将关于3D场景的全局上下文推理直接集成到不同模态的特征提取层中。
中间融合能够更好地捕获模态间的互补信息,特别适合处理复杂场景中的感知任务。
后期融合 (Late Fusion)
后期融合在决策层面进行,对多个传感器输出的结果进行综合判断。这种方法计算效率高,但对于需要全局上下文理解的复杂场景,其性能可能受限。
4、行业最新应用与落地
在多模态感知融合技术的实际应用中,已经涌现出一些令人印象深刻的成果:
高算力芯片的支持
地平线的征程5芯片应用了多模态融合技术,提供了强大的算力支持。多家芯片厂商在2024年推出了高算力AI芯片,推动了自动驾驶技术的进一步发展。
小鹏的图灵芯片支持本地运行30B参数大模型,算力相当于三颗Orin X,将多模态感知和大模型技术结合。通过自研NPU和高动态范围ISP,小鹏图灵芯片为高级别自动驾驶及智能座舱提供了强大的本地算力支持。
端到端模型的发展
特斯拉FSD V12使用Occupancy+Transformer架构,实现了感知和决策规划的端到端处理。该系统99%的决策由神经网络给出,大幅减少了对硬编码编程的依赖。
理想汽车推出了全链路一体式端到端+视觉语言模型的双系统方案。通过视觉大模型提供决策解释能力,增强规划系统的透明度和安全性。
大模型存在幻觉,这些技术目前还处于开发实验阶段,还未大规模量产。
5、数据闭环系统的关键作用
在自动驾驶多模态感知融合技术中,数据闭环系统扮演着至关重要的角色。我在多年的研究和实践中发现,一个高效的数据闭环系统应具备以下特点:
持续数据收集与标注
通过车队持续收集真实世界的驾驶数据,特别是边缘案例和罕见场景。采用半自动化标注流程,结合人工和算法力量,提高标注效率和准确性。
模型训练与评估
基于收集的数据训练多模态感知模型,通过混合现实环境(真实数据与仿真数据结合)增强模型的泛化能力。建立多维度评估指标,全面衡量模型性能。
部署与反馈
将训练好的模型部署到测试车辆上,收集模型在真实环境中的表现数据。分析模型失效案例,发现潜在的数据盲点,指导下一轮数据收集。
闭环优化
基于反馈数据持续优化数据收集策略和模型架构,形成良性循环。通过闭环系统,模型能够不断学习新的场景和适应环境变化。
6、面临的挑战与解决方案
在部署多模态融合系统时,需要注意以下几个关键问题:
传感器校准与同步
不同传感器的数据需要精确校准和同步,以确保融合的准确性。特别是在高速行驶或复杂场景中,微小的时间差异可能导致严重的感知误差。
解决思路是开发一套动态校准算法,能够在行驶过程中实时调整传感器参数,显著提高了多模态融合的准确性。
计算资源优化
多模态融合通常需要较高的计算资源,特别是在实时系统中。通过采用稀疏计算和量化技术,我们成功将模型部署到算力有限的车载平台上,在保持高精度的同时,显著提高了计算效率。
全局上下文理解
仅仅基于几何信息的融合可能无法充分理解场景的全局上下文。通过引入基于大模型的场景理解组件,我们的系统能够更好地解释复杂场景中的因果关系,为决策规划提供更可靠的输入。
7、未来发展趋势
随着技术的不断发展,多模态融合将更加注重全局上下文理解和实时性能优化。同时,车辆底部数据与传统感知数据的融合也将成为研究热点,为自动驾驶系统提供更全面、可靠的环境感知能力。
在基于大规模数据的深度学习时代,多模态融合技术将继续引领自动驾驶感知领域的创新,推动自动驾驶技术向更高水平发展。
8、相关文章
自动驾驶⻋辆环境感知:多传感器融合_多传感器融合感知-CSDN博客
PIXOR:基于LiDAR的3D检测模型解析-CSDN博客
9、结论
多模态感知融合技术是自动驾驶发展的关键推动力。通过整合摄像头和激光雷达等不同传感器的优势,结合先进的融合架构和高效的数据闭环系统,我们可以构建更加智能、安全的自动驾驶系统。
作为该领域的研究者和实践者,我将继续探索多模态感知融合的新技术和新方法,为自动驾驶的发展贡献力量。也欢迎业内同仁共同交流,推动这一关键技术的进步。
通过这篇博客,我希望能够展示我在自动驾驶数据闭环多模态领域的深刻理解,并为读者提供有价值的技术洞见。如有任何问题或讨论,欢迎在评论区留言。
相关文章:
自动驾驶的未来:多模态感知融合技术最新进展
作为自动驾驶领域的专业人士,我很高兴与大家分享关于多模态感知融合技术的前沿研究和实践经验。在迅速发展的自动驾驶领域,多模态感知融合已成为提升系统性能的关键技术。本文将深入探讨基于摄像头和激光雷达的多模态感知融合技术,重点关注最…...

亮相2025全球分布式云大会,火山引擎边缘云落地AI新场景
4 月 9 日,2025 全球分布式云大会暨 AI 基础设施大会在深圳成功举办,火山引擎边缘云产品解决方案高级总监沈建发出席并以《智启边缘,畅想未来:边缘计算新场景落地与 Al 趋势新畅想》为主题,分享了边缘计算在 AI 技术趋…...

XCode集成第三方framework步骤
一、添加 .framework 文件到项目 拖拽或手动添加 在Xcode中,直接将 .framework 文件拖入项目导航器的目标文件夹中, 确保 .framework 文件被复制到项目目录内(非外部路径)。或通过菜单操作: General → Frameworks, Libra…...
无损分区管理,硬盘管理的“瑞士军刀”!
打工人们你们好!这里是摸鱼 特供版~ 今天给大家带来一款简单易用、功能强大的无损分区软件——分区助手技术员版,让你的硬盘管理变得轻松又高效! 推荐指数:★★★★★ 软件简介 分区助手技术员版是一款功能强大的硬盘分区工具&…...
VS Code下开发FPGA——FPGA开发体验提升__下
上一篇:IntelliJ IDEA下开发FPGA-CSDN博客 Type:Quartus 一、安装插件 在应用商店先安装Digtal IDE插件 安装后,把其他相关的Verilog插件禁用,避免可能的冲突。重启后,可能会弹出下面提示 这是插件默认要求的工具链&a…...
ffmpeg播放音视频流程
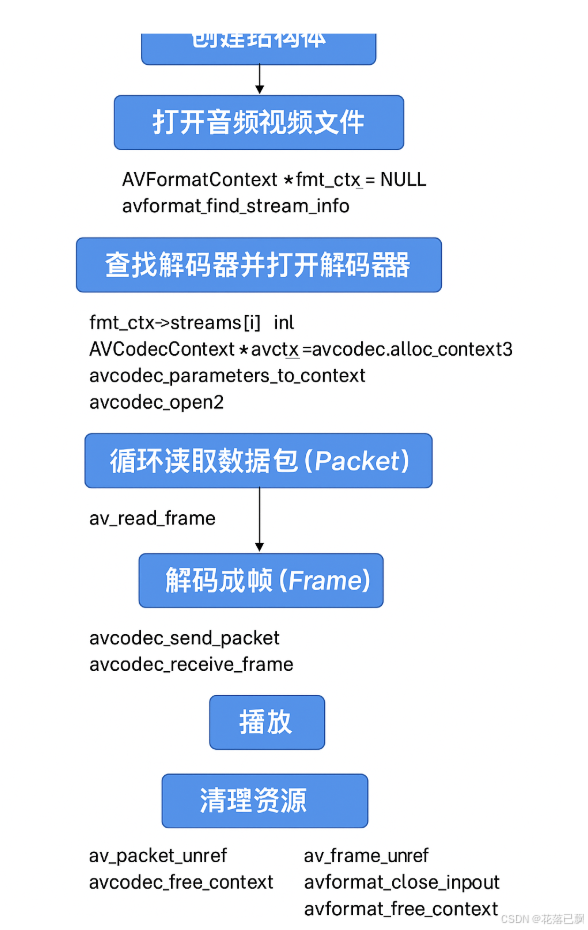
文章目录 🎬 FFmpeg 解码播放流程概览(以音视频文件为例)1️⃣ 创建结构体2️⃣ 打开音视频文件3️⃣ 查找解码器并打开解码器4️⃣ 循环读取数据包(Packet)5️⃣ 解码成帧(Frame)6️⃣ 播放 / …...

SpringCloud微服务: 分布式架构实战
# SpringCloud微服务: 分布式架构实战 第一章:理解SpringCloud微服务架构 什么是SpringCloud微服务架构? 在当今互联网应用开发中,微服务架构已经成为业界的主流趋势。SpringCloud是一个基于Spring Boot的快速开发微服务架构的工具࿰…...
AI预测3D新模型百十个定位预测+胆码预测+去和尾2025年4月11日第49弹
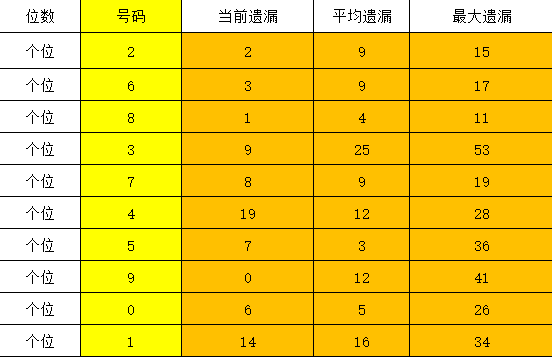
从今天开始,咱们还是暂时基于旧的模型进行预测,好了,废话不多说,按照老办法,重点8-9码定位,配合三胆下1或下2,杀1-2个和尾,再杀6-8个和值,可以做到100-300注左右。 (1)定…...

Spring其它知识点
33.Spring 源码用到了哪些设计模式? 工厂模式:通过BeanFactory或者ApplicationContext创建Bean对象。BeanFactory是延迟注入,使用到Bean的时候才注入。ApplicationContext是在容器启动时,一次性创建所有的Bean。单例模型…...
【models】Transformer 之 各种 Attention 原理和实现
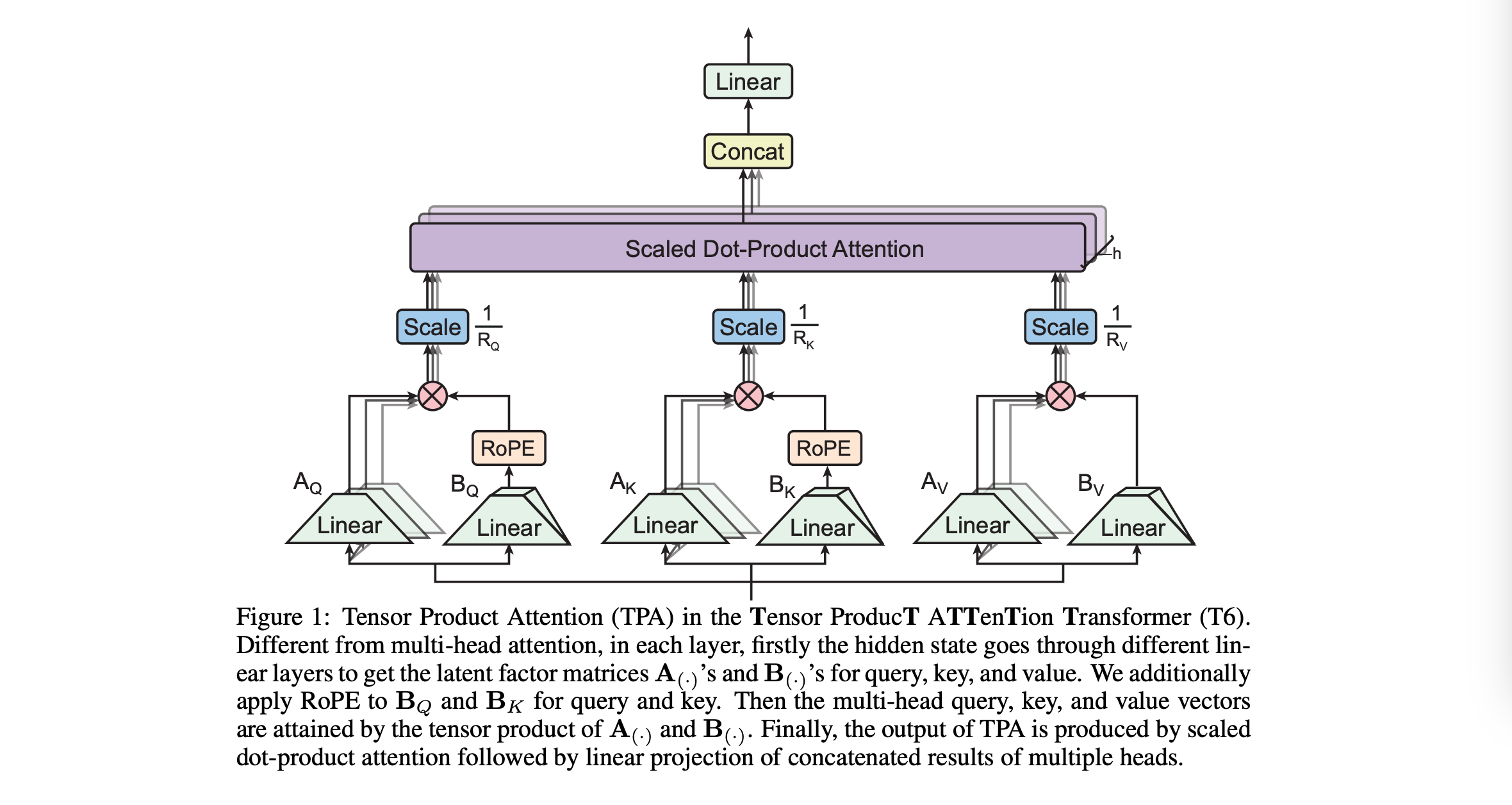
Transformer 之 各种 Attention 原理和实现 本文将介绍Transformer 中常见的Attention的原理和实现,其中包括: Self Attention、Spatial Attention、Temporal Attention、Cross Attention、Grouped Attention、Tensor Product Attention、FlashAttentio…...

C++ 学习资源整理
awesome-cpp(C 资源大全) 🔗 https://github.com/fffaraz/awesome-cpp 收集了各种 C 库、框架、教程和示例代码。 CPlusPlusThings(C 基础知识整理) 🔗 https://github.com/Light-City/CPlusPlusThings 包…...

opengrok搭建与配置
前提条件 需要配置好docker与docker-compose环境 1.代码准备 mkdir -p /data/opengrok/{etc,src,data} cd /data/opengrok/src/ # 克隆一个测试项目 git clone https://git.kernel.org/pub/scm/linux/kernel/git/stable/linux-stable.git 2.创建docker-compose.yml文件&…...

老硬件也能运行的Win11 IoT LTSC (OEM)物联网版
#记录工作 Windows 11 IoT Enterprise LTSC 2024 属于物联网相关的版本。 Windows 11 IoT Enterprise 是为物联网设备和场景设计的操作系统版本。它通常针对特定的工业控制、智能设备等物联网应用进行了优化和定制,以满足这些领域对稳定性、安全性和长期支持的需求…...

JavaScript 代码混淆与反混淆技术详解
一、代码混淆:让别人看不懂你的代码 混淆技术就是一种“代码伪装术”,目的是让别人很难看懂你的代码逻辑,从而保护你的核心算法或敏感信息。 1. 变量名压缩 原理:把变量名改成乱码,比如把calculatePrice改成a&#…...

数据库守护神-WAL机制
什么是WAL机制? WAL(Write-Ahead Logging,预写日志)是一种保证数据库操作原子性和持久性的核心机制。其核心原则可概括为: 任何数据修改操作,必须在对应的日志记录持久化到磁盘之后,才能将实际…...
Git开发
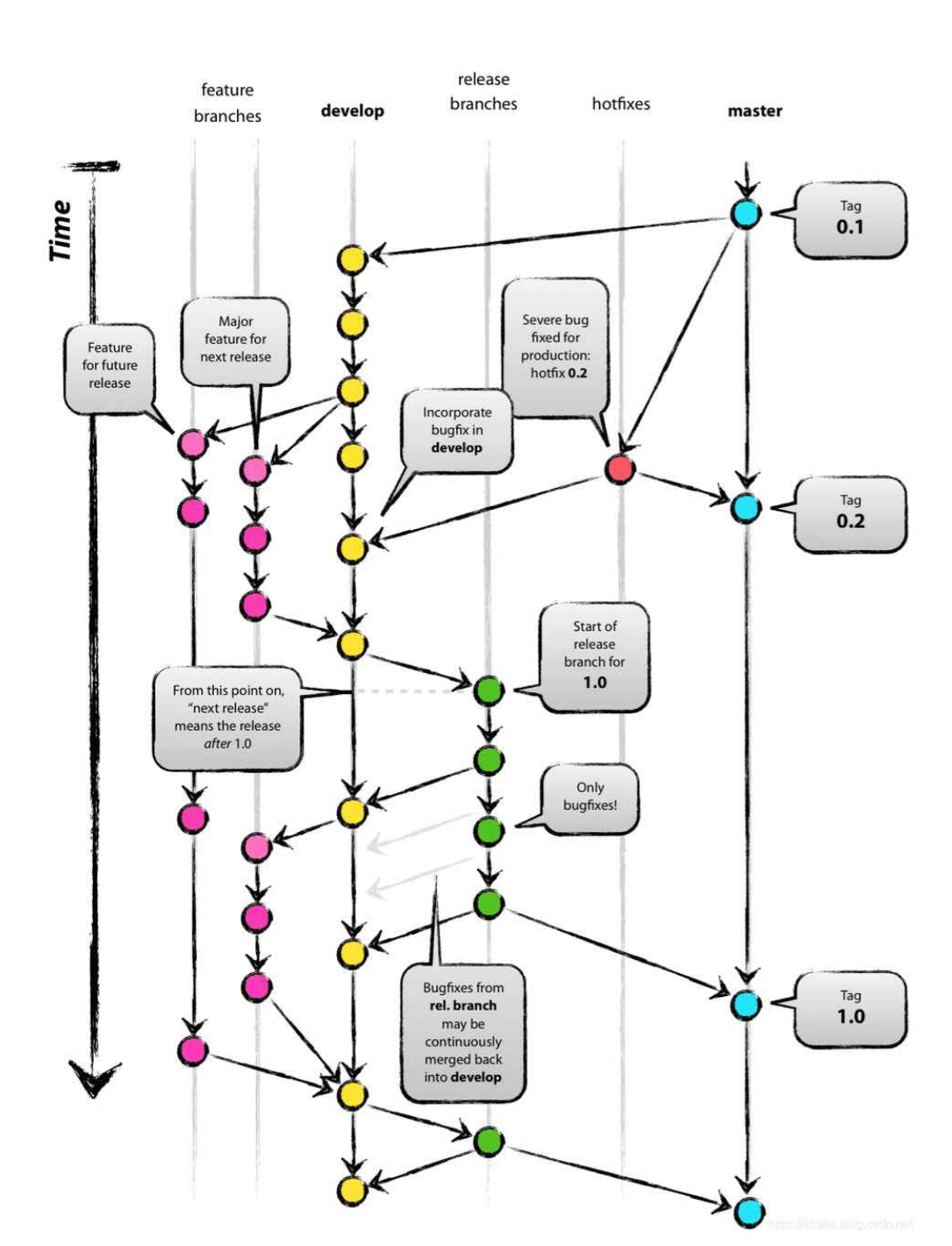
目录 Linux下Git安装Git基本指令分支管理远程仓库与本地仓库标签管理多人协作同一分支下不同分支下 企业级开发模型 -- git flow 模型 在现实中,当我们完成一个文档的初稿后,后面可能还需要对初稿进行反复修改,从而形成不同版本的文档。显然&…...
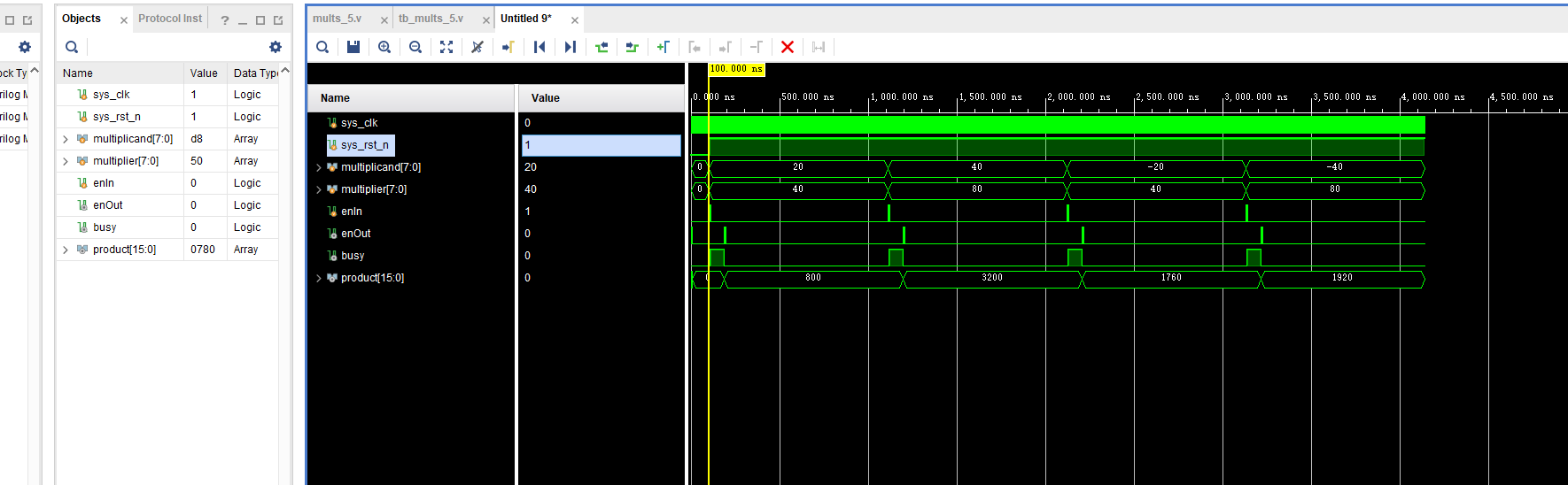
verilog有符号数的乘法
无符号整数的乘法 1、单周期乘法器( 无符号整数 ) 对于低速要求的乘法器,可以简单的使用 * 实现。 module Mult(input wire [7:0] multiplicand ,input wire [7:0] multipliter ,output wire [7:0] product);as…...

【蓝桥杯】动态规划:背包问题
这篇文章主要记录动态规划方面的学习。 动态规划的核心思想: 把大问题分解成小问题,记住小问题的解,避免重复计算。 动态规划(DP)的三大特点: ①最优子结构:大问题的最优解可以由小问题的最优解推导出来 ②重叠子问题:在求解过程中会反复遇到相同的小问题 ③无后效…...

DevDocs:抓取并整理技术文档的MCP服务
GitHub:https://github.com/cyberagiinc/DevDocs 更多AI开源软件:发现分享好用的AI工具、AI开源软件、AI模型、AI变现 - 小众AI DevDocs 是一个完全免费的开源工具,由 CyberAGI 团队开发,托管在 GitHub 上。它专为程序员和软件开发…...
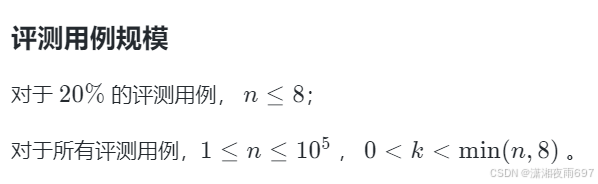
第十四届蓝桥杯大赛软件赛国赛Python大学B组题解
文章目录 弹珠堆放划分偶串交易账本背包问题翻转最大阶梯最长回文前后缀贸易航线困局 弹珠堆放 递推式 a i a i − 1 i a_ia_{i-1}i aiai−1i, n 20230610 n20230610 n20230610非常小,直接模拟 答案等于 494 494 494 划分 因为总和为 1 e 6 1e6…...

折叠屏手机:技术进步了,柔性OLED面板测试技术需求跟上了吗?
全球智能手机市场陷入创新焦虑,折叠屏手机被寄予厚望,2023 年出货量同比增长 62%。但在供应链技术狂欢背后,存在诸多问题。消费端数据显示,用户使用频率低,定价策略反常。产业链重构虽让部分企业获利,却推高…...
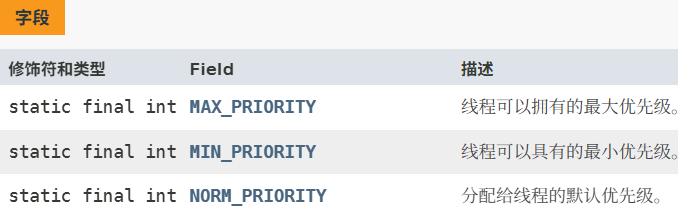
30天学Java第九天——线程
并行与并发的区别 并行是多核 CPU 上的多任务处理,多个任务在同一时间真正的同时执行并发是单核 CPU 上的多任务处理,多个任务在同一时间段内交替执行,通过时间片轮转实现交替执行,用于解决 IO 密集型任务的瓶颈 线程的创建方式…...

kotlin的takeIf使用
takeIf用于判断指定对象是否满足条件,满足就返回该对象自身,不满足返回null。因为可以返回对象自身,所以可以用作链式调用,以简化代码,又因takeIf可能返回空,所以常常和let结合使用,示例如下&am…...

计算机毕业设计指南
哈喽各位大四的小伙伴们,以下是一份详细的计算机专业毕业设计指南,涵盖选题、流程、技术选型、开发建议和常见问题解决方案,帮助你高效完成毕业设计,如有其他问题,欢迎点击文章末尾名片进行咨询,可免费赠送…...
自行搭建一个Git仓库托管平台
1.安装Git sudo apt install git 2.Git本地仓库创建(自己选择一个文件夹) git init 这里我在 /home/test 下面初始化了代码仓库 1. 首先在仓库中新建一个txt文件,并输入一些内容 2. 将文件添加到仓库 git add test.txt 执行之后没有任何输…...

LeeCode 409.最长回文串
给定一个包含大写字母和小写字母的字符串 s ,返回 通过这些字母构造成的 最长的 回文串 的长度。 在构造过程中,请注意 区分大小写 。比如 "Aa" 不能当做一个回文字符串。 示例 1: 输入:s "abccccdd" 输出:7 解释: 我们可以构造的…...

ARM处理器内核全解析:从Cortex到Neoverse的架构与区别
ARM处理器内核全解析:从Cortex到Neoverse的架构与区别 ARM作为全球领先的处理器架构设计公司,其内核产品线覆盖了从高性能计算到低功耗嵌入式应用的广泛领域。本文将全面解析ARM处理器的内核分类、架构特点、性能差异以及应用场景,帮助读者深…...

【前端分享】JavaScript异步编程详解!
JavaScript 的异步编程是其核心特性之一,主要用于处理非阻塞操作(如网络请求、文件读写、定时任务等)。由于 JavaScript 是单线程的,异步机制可以避免代码阻塞,提高性能和用户体验。以下是 JavaScript 异步编程的核心概…...
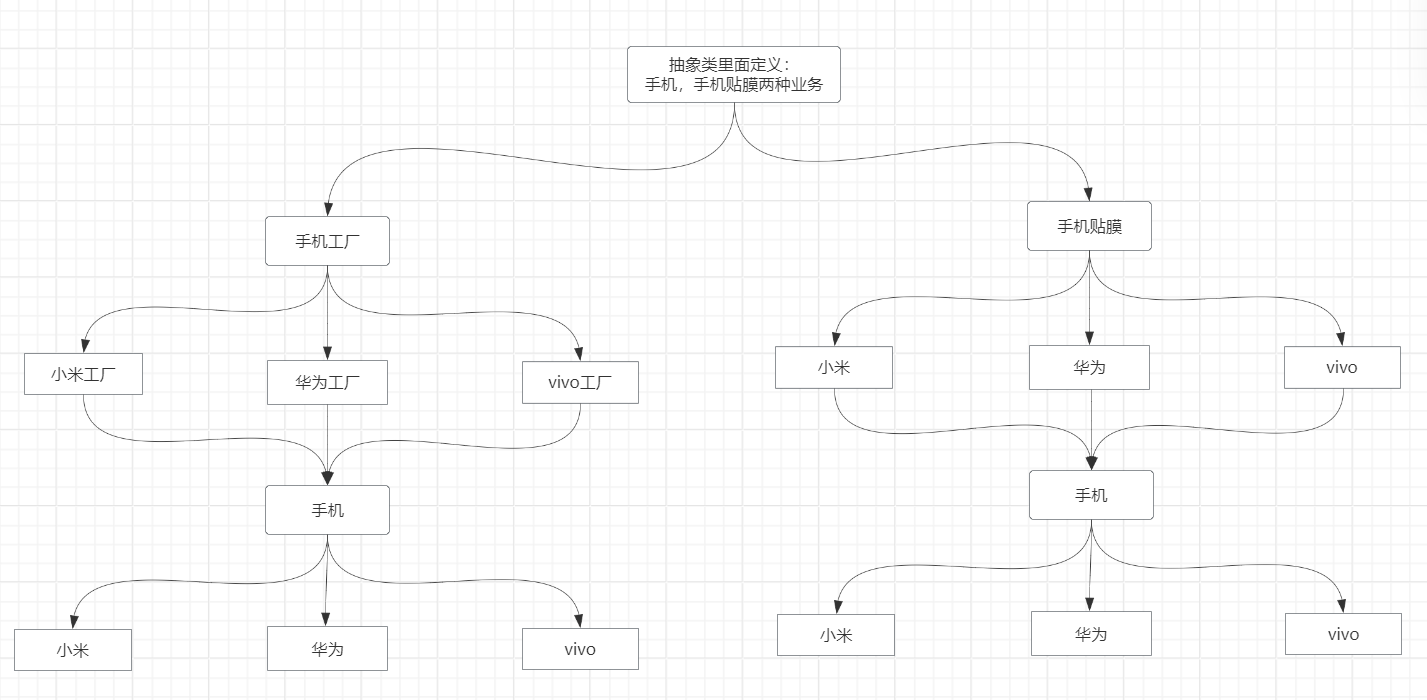
工厂模式(简单工厂,工厂方法,抽象工厂)
工厂模式 工厂模式是java中最常用的设计模式,主要是用来完成对象的创建,使得对象创建过程和对象使用过程分离。 简单来说是取消对象创建者和使用者的耦合,简化new 对象的创建。 优势 :对象的属性创建完整。 缺点: 创建…...

Unity Internal-DeferredShading 分析
1. 延迟渲染的原理 延迟渲染主要包含了两个Pass。在第一个Pass中,我们不进行任何光照计算,而是仅仅计算哪些片元是可见的,这主要是通过深度缓冲技术来实现,当发现一个片元是可见的,我们就把它的相关信息存储到G缓冲区…...