智能车摄像头开源—9 动态权、模糊PID、速度决策、路径优化
目录
一、前言
二、动态权
1.概述
2.偏差值加动态权
三、模糊PID
四、速度决策
1.曲率计算
2.速度拟合
3.速度控制
五、路径
六、国赛视频
一、前言
在前中期通过识别直道、弯道等元素可进行加减速操作实现速度的控制,可进一步缩减一圈的运行速度,但会出现刹车不及时、加速不及时、车路径较差等问题,反而导致处理后运行一圈时间反而多于之前。由此我们引入多个方法,使车辆能自行解算自行控制速度、转向力度等,以跑出最好效果。
当然有部分代码为了提高摩托运行稳定性的,对于四轮车模反而是一种限制,需读者使用时自行删减。
二、动态权
1.概述
如果图像有六十行,那我们可以得到六十行有效偏差值(弯道时有效行数会减少),我们在计算偏差值时,常用的方法是将所有有效行的偏差值相加,再取均值。
但调过车的都知道,当所有行取均值时,会导致弯道打角力度不够,直线打角力度过大导致车辆摆动的情况。
参考我们平时开车或者骑车时的情形,车快时我们眼睛就看的远,车速慢时我们眼睛就看的近。由此我们可以优化上述情况,引入加权。
最简单且繁琐的方法是引入固定权值(提前录入权值数组),即提前设定好不同元素的加权情况:
1. 如识别出直线时,我们将图像远端的权值加大,而图像中端和近端的权值减小,在远端出现弯道时,会让车辆高速情况下提前出现打角倾向。
2. 当贴近弯道时,我们将图像中端的权值加大,就可以减少底端较小偏差值的干扰,保证车的打角力度。
3. 识别出小S弯时,我们将权值情况如同直线处理,高权值放在远端,那么就可以惊奇的发现,车在跑小S弯时几乎无左右摆动情况,直线路径穿过小S弯,在提高车速的同时也减少了打角消耗的时间。
4. 在处理十字和环岛时,我们可以对多个状态设定权值,可以优化在元素不同状态时的转向效果。
但上述方法存在弊端:一方面元素与元素之间权值会切换的很生硬,使车辆出现摆动;另一方面当我们需要加速时,所有的元素权值都需要调整,十分繁琐。由此我们引入动态权。
2.给偏差值加动态权
控制动态权我们使用一个数据,为爬线相遇点的Y值(一个可以反映偏差值有效行的数据),那么在直线和小S弯等地方,Y贴近图像最远端,那么高权值就自动滑动到最远端。在由直线靠近弯道时,相遇点Y值不断下压,那么高权值就随着Y值向下滑动到中间区域,整个过程很丝滑,不会出现强硬的切换,并且十分易于修改。下面上代码:
//相遇点滑动均值滤波uint8 Y_Meet_Max = 0;uint8 Y_Meet_Min = 0;uint16 Y_Meet_Sum = 0;uint8 Y_Meet_Average = 0;Y_Meet_Min = Y_Meet_Array[0];Y_Meet_Max = Y_Meet_Array[0];for(i = 0; i < 19; i++){Y_Meet_Array[i + 1] = Y_Meet_Array[i];}Y_Meet_Array[0] = start;for(i = 0; i < 20; i++){if(Y_Meet_Array[i] < Y_Meet_Min){Y_Meet_Min = Y_Meet_Array[i];}if(Y_Meet_Array[i] > Y_Meet_Max){Y_Meet_Max = Y_Meet_Array[i];}}for(i = 0; i < 20; i++){Y_Meet_Sum += (uint16)Y_Meet_Array[i];}Y_Meet_Sum = Y_Meet_Sum - (uint16)Y_Meet_Min - (uint16)Y_Meet_Max;Y_Meet_Average = (uint8)(Y_Meet_Sum / 18);if(Y_Meet_Average > 20){Y_Meet_Average = 20;}else if(Y_Meet_Average < 2){Y_Meet_Average = 2;} //一直到这里都是华东均值滤波,滤的比较狠,防止数据跳动// float Temp_Float = (0.9f * (float)(Y_Meet_Average - 2) + 1.8f * Sensitivity);float Temp_Float = (float)(Y_Meet_Average - 2); //当直线时,我的Y_Meet值是2if(Temp_Float > 18.0f) //限幅{Temp_Float = 18.0f;}if(Temp_Float < 0){Temp_Float = 0;}//固定权值uint8 Base_Weight[60] = {0, 0, 2, 0, 2, 0, 2, 0, 2, 0, 2, 0, 2, 0, 2, 0, 2, 0, 2, 0, 2, 0, 2, 0, 2, 0, 2, 0, 2, 0,2, 0, 2, 0, 2, 0, 2, 0, 2, 0, 2, 0, 2, 0, 2, 0, 2, 0, 2, 0, 2, 0, 2, 0, 2, 0, 2, 1, 0, 0};//局部动态权值,可根据车速自行调整区间和数值uint8 Trends_Weight[19] = {4, 5, 5, 6, 6, 7, 7, 8, 9, 10, 9, 8, 7, 7, 6, 6, 5, 5, 4};//动态权重加权起始行只能落在24 - 40行之间(由下往上),相遇点最大值为20(减2为Temp_Float最大值为18)uint8 Start_Line = (uint8)(Temp_Float / 18.0f * 16.0f + 24.0f);//将动态权值赋值给固定权值数组for(i = 0; i < 19; i ++){Base_Weight[Start_Line - i] = Trends_Weight[i];}for(i = Y_Meet_Average + 1; i < 57; i++) //加权,可直接加权给中线之后再算偏差值,也可直接加权给每行偏差值{Sum += (int32)Base_Weight[i] * (int32)C_Line[i];Weight_Sum += (int32)Base_Weight[i];}识别出元素时也可适当给固定权保证车辆行驶的稳定性。
三、模糊PID
模糊PID,是对P, I, D其中一个变量或几个变量进行模糊,每模糊一个参数,就需要写一个对应的模糊表。当模糊多个参数时,调参工作量会增大。因此我们组别只模糊了专项环的P值
模糊PID重要的是原理,先上一张图:
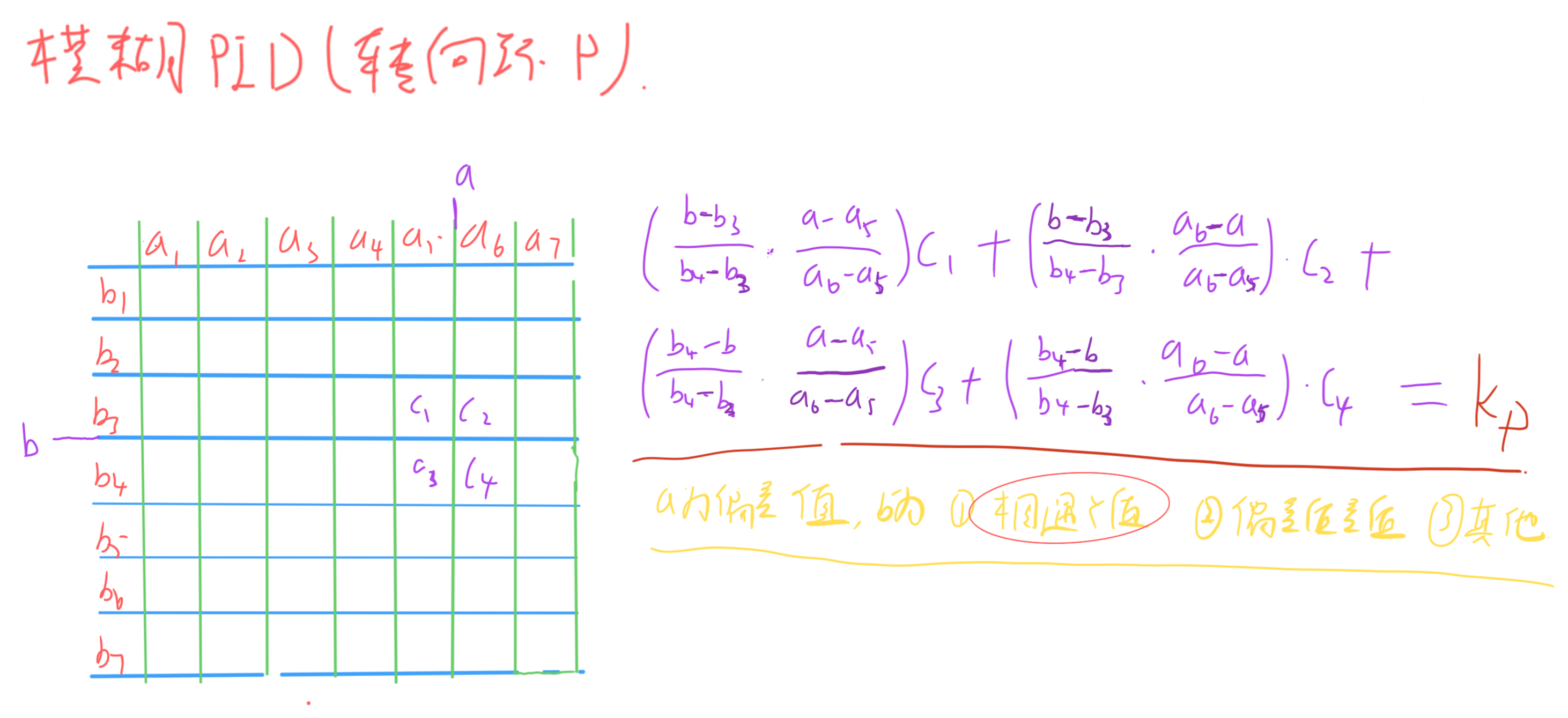
(自己手绘潦草勿喷)
模糊的原理即查表映射,上述图中,a为偏差值;b网络上多为偏差值的差值,即偏差值的变化率(反映偏差值的变化情况,如直线时变化率很小,进入弯道时变化率会很大);c就是对应的Kp值了。举例理解:我的偏差值区间为 -1 到 1 (其中负数向左转,正数向右转),那么我将(-1,1)等分为六个区间(七个值),作为模糊表的横向变量。列向变量也是同理。
那我们映射的时候,是获得一个偏差值,再获得一个偏差值的差值,然后在表中一查找直接对应到一个值作为转向环的P吗?
是也不是。我们会发现我们很少会获得一个a参数和b参数,其中a参数和 a1~a7中的某一个值正好对应,b参数也正好和b1~b7中的某一个值正好对应,绝大多数情况下两者是都无法正好相对的,那么我们就需使用占比对应的方式。
正如上述图中的式子,假设我们获得一个偏差a位于区间a5~a6,偏差的差值b位于区间b3~b4,那我们可列出如下式子:
Kp = [(b - b3)/ (b4 - b3)] * [(a - a5) / (a6 - a5)] * c1 +
[(b - b3)/ (b4 - b3)] * [(a6 - a) / (a6 - a5)] * c2 +
[(b4 - b)/ (b4 - b3)] * [(a - a5) / (a6 - a5)] * c3 +
[(b4 - b)/ (b4 - b3)] * [(a6 - a) / (a6 - a5)] * c4
不要觉得式子很长很繁琐,就是初中的知识,一眼就能看懂。理解了上述原理后,就懂了模糊PID查表的核心思路。然后阅读这篇文章(其中隶属度通俗点讲就是所占的比例,代码可看可不看):
【智能车】模糊PID控制原理详解与代码实现
然后我们再细说下c,即如何在表格中填入Kp的值:
1. 首先我们让车以一个恒定速度行进,测出弯道转向时需要的Kp值,即PB(尽量使路径最好);
2. 然后给一个较快的速度,测出直线时车身比较平稳的Kp值,即NB(尽量使路径最好);
3. 然后将最大~最小值均分为七个值,对应上述文章里的NB ~ PB;
4. 最后将Kp的七个值,按照既定的规则表填入表格内(注意不要自己乱填,当自己能力足够时可自行优化规则表)
到这一步,相必已经完全了解模糊PID的原理和使用方法了,那么接下来就是代码的实现了。这里代码与上述方法相似但不相同,但核心原理与方法是完全一致的,只是实现的方式进行了改进。此处我的b使用的并不是偏差值的差值,而是爬线相遇点的Y值:
//除了注释了(需要改)的地方,其他地方直接照抄就可以float Dif_Effictive_Line = 40.0f; //偏差值最大值
int16 View_Effictive_Line = 20; //相遇点Y坐标的最大值(需要改)float P_Value_L[7] = {11.0f, 12.0f, 12.5f, 13.0f, 14.5f, 15.5f, 17.2f}; //这里没有等分,自己调一调车可摸出规律(需要改)float Vague_Array[4][4] = { {0, 1, 2, 3},{1, 2, 3, 4},{3, 4, 5, 6},{5, 6, 6, 6}}; //这个表原样抄下来float f_Get_H_approximation(int16 i16_ViewH)
{float H_approximation;if (i16_ViewH < 0){i16_ViewH = 0;}H_approximation = ((float)i16_ViewH * 3.0f / (float)View_Effictive_Line); //*3.0是为了将结果放大三倍return H_approximation;
}float f_Get_E_approximation(float i16_E)
{float E_approximation;if (i16_E < 0){i16_E = -i16_E;}E_approximation = (float)i16_E * 40.0f * 3.0f/ Dif_Effictive_Line; //*3.0与上述同理,还多乘了个四十,与Dif_Effictive_Line 的值对应上return E_approximation;
}int16 Off_Line = 0;
int16 Now_Off_Line = 0; //用于滤波
int16 Last_Off_Line = 0; //用于滤波第一个参数输入相遇点Y坐标
第二个参数输入归一化后的偏差值
float Get_P(int16 off_line, float dif_value)
{Last_Off_Line = Now_Off_Line;Now_Off_Line = off_line;if(((Now_Off_Line - Last_Off_Line) >= 10) || ((Now_Off_Line - Last_Off_Line) <= -10) || Now_Off_Line >= 45) //需要改{Off_Line = Last_Off_Line;}else{Off_Line = (int16)(0.3f * (float)(Now_Off_Line) + 0.7f * (float)(Last_Off_Line));}//下面这部分代入几个数据,结合整段代码计算几遍即可理解,只看的话比较吃力float VH = f_Get_H_approximation(off_line - 2);float VE = f_Get_E_approximation(dif_value);float X2Y = 0;float X1Y = 0;float Y2X = 0;float Y1X = 0;int8 VH1 = (int)VH;if (VH1 > VH){VH--;}int8 VH2 = VH1 + 1;int8 VE1 = (int8)VE;if (VE1 > VE){VE1--;}int8 VE2 = VE1 + 1;if (VH1 > 3){VH1 = 3;}if (VH2 > 3){VH2 = 3;}if (VE1 > 3){VE1 = 3;}if (VE2 > 3){VE2 = 3;}X2Y = (Vague_Array[VH1][VE2] - Vague_Array[VH1][VE1]) * (VE - VE1) + Vague_Array[VH1][VE1];X1Y = (Vague_Array[VH2][VE2] - Vague_Array[VH2][VE1]) * (VE - VE1) + Vague_Array[VH2][VE1];Y2X = (Vague_Array[VH2][VE1] - Vague_Array[VH1][VE1]) * (VH - VH1) + Vague_Array[VH1][VE1];Y1X = (Vague_Array[VH2][VE2] - Vague_Array[VH1][VE2]) * (VH - VH1) + Vague_Array[VH1][VE2];float P_approximation = (X2Y + X1Y + Y2X + Y1X) / 4.0;int8 P1 = (int8)P_approximation;if (P1 > P_approximation){P1--;}int8 P2 = P1 + 1;return (P_Value_L[P2] - P_Value_L[P1]) * (P_approximation - P1) + P_Value_L[P1]; //返回p值
}
四、速度决策
1.曲率计算
速度要变化起来,就需要有参考,即根据一个或两个实时求出的数据去控制权值的滑动。那么第一个变量我使用的是中线曲率:
曲率我尝试了很多算法,都不是很稳定,由此大道至简,直接将中线每两行之间的X坐标的差值相加求均值再归一化(归一化所除的系数在弯道处实测得出),就可以反映中线的弯曲程度,也近似可看为曲率。
注:这里每两行之间X坐标的差值不可取绝对值后再相加。在弯道时,中线是向一侧弯的,那么X坐标的差值的符号都是一样的,可以得到一个比较大的均值。而在小S弯处,X坐标的差值有正有负,那么相加之后求均值会获得一个比较小的值,这是将小S弯当直线处理的关键所在。
这里我的代码参照动态权的思想给曲率的计算也加了个小型化的动态权,即突出重点区域,使用爬线相遇点Y坐标(即图像最大有效行)控制权值移动,可自行修改这部分,根据实际情况选用是否需要这部分处理。
下面上代码:
float Last_Curvature_Value = 0; //防止
/**
* 函数功能: 计算中线曲率,作为控制速度的一个数据
* 特殊说明: 无
* 形 参: uint8 *line 中线
* uint8 start 爬线相遇点的Y值,或最大有效行
* uint8 end 爬线起始行(或图像最底端)
*
* 示例: Calculate_Curvature_2(C_Line, Y_Meet, L_Start_Point[1]);
* 返回值: Last_Curvature_Value 所得曲率
*/
float Calculate_Curvature_2(uint8 *line, uint8 start, uint8 end)
{int16 Sum_Difference_Value = 0; //用于X坐标差值的累积int16 Sum_Weight = 0; //用于权值相加uint8 i = 0;uint8 Base_Curvature_Weight[60] = {0, 0, 1, 0, 1, 0, 1, 0, 1, 0,1, 0, 1, 0, 1, 0, 1, 0, 1, 0,1, 0, 1, 0, 1, 0, 1, 0, 1, 0,1, 0, 1, 0, 1, 0, 1, 0, 1, 0,1, 0, 1, 0, 1, 0, 1, 0, 1, 0,1, 0, 1, 0, 1, 0, 1, 0, 1, 0}; //固定权值,0,1,0,1间隔加权uint8 Trends_Curvature_Weight[19] = {4, 5, 5, 6, 6, 7, 7, 8, 8, 8, 8, 8, 7, 7, 6, 6, 5, 5, 4}; //动态权值,高权值放中间uint8 Start_Line = (uint8)((float)(Y_Meet - 2) / 18.0f * 16.0f + 24.0f); //动态权替换固定权起始行,我图像为60行,最低从24行向上替换,最高为40行向上替换,Y_Meet最大值为20//将动态权值赋值给固定权值数组for(i = 0; i < 19; i ++){Base_Curvature_Weight[Start_Line - i] = Trends_Curvature_Weight[i];}for(i = start; i < end - 1; i++) //求差值和并求出权值{Sum_Difference_Value += (int16)(My_ABS((int)line[i] - (int)line[i + 1]) * (int)Base_Curvature_Weight[i]);Sum_Weight += (int16)Base_Curvature_Weight[i];}if(Sum_Weight != 0) //防止权值为0,但好像不会出现,当时不知道为啥要写这个{Last_Curvature_Value = (float)Sum_Difference_Value / (float)Sum_Weight; //求加权平均值,归一化放在了另一个函数里return Last_Curvature_Value;}else{return Last_Curvature_Value;}
}2.速度拟合
除了曲率,速度拟合还需引入爬线相遇点Y值作为第二个参考数据,下面这部分代码思想有一定深度:
float Speed_Value[7] = {0.0f, 0.166f, 0.333f, 0.5f, 0.666f, 0.833f, 1.0f}; //速度采用了归一化,将1.0均分为六段float Speed_Vague_Array[4][4] = { {0, 1, 2, 3},{1, 2, 3, 4},{3, 4, 5, 6},{5, 6, 6, 6}}; //映射数组int16 Y_Meet_Count = 0; //累积满足相遇点条件的次数,比如由弯道进入直道时,车身未转正时Y_Meet已经趋近于2了,此时加速会导致车轨迹不稳//那我们就进行一定的缓冲,当Y_Meet满足我们设定的条件一定次数后,再去执行相应的加速程序,可确保车身转正再加速
/**
* 函数功能: 使用相遇点和曲率映射速度,参照模糊PID思想
* 特殊说明: 无
* 形 参: float sensitivity //曲率
* float speed_min_proportion //速度最小比率(设定最小速度与最大速度的比值),为0~1之间
* float Speed_max_proportion //速度最大比率,通常为1
* uint8 y_meet //爬线相遇点的Y坐标
* uint8 min_y_meet //爬线相遇点的最小值,看得越远值越小
* uint8 max_y_meet //爬线相遇点的最大值,看得越远值越大
*
* 示例: Calculate_Curvature_2(C_Line, Y_Meet, L_Start_Point[1]);
* 返回值: Last_Curvature_Value 所得曲率
*/
float Speed_Mapping(float sensitivity, float speed_min_proportion, float Speed_max_proportion, uint8 y_meet, uint8 min_y_meet, uint8 max_y_meet)
{uint16 i = 0;float VH = 0, VE = 0;float X2Y = 0;float X1Y = 0;float Y2X = 0;float Y1X = 0;uint8 View_Effictive_Line = max_y_meet - min_y_meet;//弯道、环岛、十字时设定最大速度为35(这是我们组控制位给的一个值,换成自己组的)if(Element_State == L_Turn || Element_State == R_Turn || Element_State == L_Circle || Element_State == R_Circle || Element_State == Cross){Y_Meet_Count = 0;Max_Speed = 35;}//下面就是所说的缓冲代码,弯道到直道切换时,爬线相遇点Y趋近于2,当满足一千次以后(计算一千张图像),将最大速度设定为40//另一方面更重要的是为了防止误判,导致乱加减速//冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!//冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!//冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!冲!else if(Y_Meet <= 4 && Max_Speed == 35){Y_Meet_Count ++;if(Y_Meet_Count >= 1000){Y_Meet_Count = 0;Max_Speed = 40;}}//一次不满足就重新来,比较严格,可以不用或者判定放缓一些else if(Y_Meet != 2 && Max_Speed == 35){Max_Speed = 35;Y_Meet_Count = 0;}//直道到弯道的缓冲(作用于弯道在图像最远端,还未识别到弯道时),这个缓冲时间短一些,减速快些,这两个计数值根据自己情况调整else if(Y_Meet != 2 && Max_Speed == 40){Y_Meet_Count --;if(Y_Meet_Count <= -350){Y_Meet_Count = 0;Max_Speed = 35;}}//获取左右两侧边线落在边框上的个数Get_L_Border_Point_Num();Get_R_Border_Point_Num();//当识别出元素是直道,爬线相遇点位于顶端,左右两侧几乎没有落在边框上的点,并且中线曲率很小时,直接返回最大速度开冲!//此处判定十分严格,不会误判,不满足时才执行下方速度拟合部分代码if(Element_State == 2 && Y_Meet <= 3 && L_Border_Point_Num <= 2 && R_Border_Point_Num <= 2 && sensitivity <= 0.2f){return Max_Speed;}//下面使用曲率和爬线相遇点Y坐标拟合速度//与模糊PID原理相同,不过多注释VH = ((float)(Y_Meet - 2) * 3.0f / (float)View_Effictive_Line);VE = sensitivity * 3.0f;int8 VH1 = (int8)VH;if (VH1 > VH){VH--;}int8 VH2 = VH1 + 1;int8 VE1 = (int8)VE;if (VE1 > VE){VE1--;}int8 VE2 = VE1 + 1;if (VH1 > 3){VH1 = 3;}if (VH2 > 3){VH2 = 3;}if (VE1 > 3){VE1 = 3;}if (VE2 > 3){VE2 = 3;}X2Y = (Speed_Vague_Array[VH1][VE2] - Speed_Vague_Array[VH1][VE1]) * (VE - VE1) + Speed_Vague_Array[VH1][VE1];X1Y = (Speed_Vague_Array[VH2][VE2] - Speed_Vague_Array[VH2][VE1]) * (VE - VE1) + Speed_Vague_Array[VH2][VE1];Y2X = (Speed_Vague_Array[VH2][VE1] - Speed_Vague_Array[VH1][VE1]) * (VH - VH1) + Speed_Vague_Array[VH1][VE1];Y1X = (Speed_Vague_Array[VH2][VE2] - Speed_Vague_Array[VH1][VE2]) * (VH - VH1) + Speed_Vague_Array[VH1][VE2];float Speed_approximation = (X2Y + X1Y + Y2X + Y1X) / 4.0;int8 Speed_1 = (int8)Speed_approximation;if (Speed_1 > Speed_approximation){Speed_1--;}int8 Speed_2 = Speed_1 + 1;return (1.0f - ((Speed_Value[Speed_2] - Speed_Value[Speed_1]) * (Speed_approximation - Speed_1) + Speed_Value[Speed_1])) * (float)(Max_Speed - Min_Speed) + (float)Min_Speed; //返回拟合好的速度
}3.速度控制
我们需要一个整体的函数进行速度的调控,减速拉伸部分有一定难度(也可以不使用),多读几次就好,下面上代码:
float Last_Sensitivity = 0;
float Temp_Sensitivity = 0;
float Speed_Proportion_Array[100] = {0}; //用于滑动均值滤波
/**
* 函数功能: 进行速度控制使用相遇点和曲率映射速度,参照模糊PID思想
* 特殊说明: 无
* 形 参: uint8 Auto_Control_Flag 是否要车辆自行控制速度
* //当自动控制标志位为1时,速度根据中线曲率和相遇点进行拟合
* //当自动控制标志位为0时,速度由手动输入
* uint16 Manual_Control_Value //手动控制速度
*
* 示例: Fitting_Speed_Control(1, 0);
* 返回值: 无
*/
void Fitting_Speed_Control(uint8 Auto_Control_Flag, uint16 Manual_Control_Value, uint8 element, uint8 element_state, uint8 start, uint8 end)
{uint8 i = 0;if(Auto_Control_Flag == 1){float Temp_Speed_Proportion = 0;//计算中线曲率,用于速度控制Last_Sensitivity = Sensitivity;Temp_Sensitivity = Calculate_Curvature_2(C_Line, Y_Meet, L_Start_Point[1]) / 1.0f;//计算最小速度比率Speed_Min_Proportion = (float)Min_Speed / (float)Max_Speed;//Stretch_Coefficient:减速拉伸系数,此参数越大,减速距离越短,最大值为1//Stretch_Coefficient 等于手动设定一个曲率最小阈值,小于这个阈值时直接将曲率设为0if(Temp_Sensitivity <= Stretch_Coefficient){Sensitivity = 0.0f;}else //将(阈值~1.0)之间的数进行拉伸,可以代入几个实际的数理解下这部分原理{float Temp_Float_Num = (Temp_Sensitivity - Stretch_Coefficient) * (1.0f / (1.0f - Stretch_Coefficient));Sensitivity = Limit_Float(Temp_Float_Num * 0.3f + Last_Sensitivity * 0.7f, 0.01f, 1.0f); //曲率值滤波}Temp_Speed_Proportion = Speed_Mapping(Sensitivity, Speed_Min_Proportion, 1.0f, Y_Meet, 2, 12); //计算速度Speed_Proportion = Limit_Float(Temp_Speed_Proportion, (float)Min_Speed, (float)Max_Speed); //速度限幅//滑动均值滤波,防止速度突变float Speed_Proportion_Sum = 0;for(i = 0; i < 99; i ++){Speed_Proportion_Array[i + 1] = Speed_Proportion_Array[i];}Speed_Proportion_Array[0] = Speed_Proportion;for(i = 0; i < 100; i ++){Speed_Proportion_Sum += Speed_Proportion_Array[i];}Speed_Proportion = Speed_Proportion_Sum / 100.0f;} else{//手动控制速度部分的代码相必就很简单了,我这里比较乱,需读者自行编写了}
}五、路径
车运行时,路径是极为重要的,匀速下好的路径甚至要快于加减速下路径较差的情况,因此对于转向的路径是每个组别需要下功夫的难题。对于路径控制,因摩托比较难掌控,所以未在这方面多加探索,所熟知的有上交开源方案中的纯跟踪控制,比较适用于四轮车模,可查询资料多加探索和尝试。
但是,一定要尽可能优化路径!尽可能优化路径!尽可能优化路径!
六、国赛视频
比赛时正好直播镜头切到了摩托组,学弟及时开启了录屏,留下了这一段非常有纪念意义的视频(此处只剪出了最快速完赛的部分)。卓大的亲自解说也算是弥补了部分国二的遗憾,同时也证明整个系列开源的文案并非一纸空文,而是有实际效果的,各位车友可放心参考。
智能车赛国二摩托完赛视频
相关文章:
智能车摄像头开源—9 动态权、模糊PID、速度决策、路径优化
目录 一、前言 二、动态权 1.概述 2.偏差值加动态权 三、模糊PID 四、速度决策 1.曲率计算 2.速度拟合 3.速度控制 五、路径 六、国赛视频 一、前言 在前中期通过识别直道、弯道等元素可进行加减速操作实现速度的控制,可进一步缩减一圈的运行速度ÿ…...

《2025蓝桥杯C++B组:D:产值调整》
**作者的个人gitee** 作者的算法讲解主页▶️ 每日一言:“泪眼问花花不语,乱红飞过秋千去🌸🌸” 题目 二.解题策略 本题比较简单,我的思路是写三个函数分别计算黄金白银铜一次新产值,通过k次循环即可获…...

蓝队技能-Web入侵-入口查杀攻击链
Web攻击事件 分析思路: 1、利用时间节点筛选日志行为 2、利用对漏洞进行筛选日志行为 3、利用后门查杀进行筛选日志行为 4、利用文件修改时间筛选日志行为 Web日志分析 明确存储路径以及查看细节 常见中间件存储路径 IIS、Apache、Tomcat 等中间件的日志存放目…...

Android11车载WiFi热点默认名称及密码配置
一、背景 基于车厂信息安全要求,车载热点默认名称不能使用统一的名称,以及默认密码不能为简单的1~9。 基于旧项目经验,组装工厂自动化测试及客户整车组装的时候均存在多台设备同时打开,亦不太推荐使用统一的热点名称,连接无法区分。 二、需求 根据客户的要求,默认名称…...

对于GAI虚假信息对舆论观察分析
摘要 生成式人工智能(Generative Artificial Intelligence, GAI)的技术革新重构了信息生产机制,但也加剧了虚假信息对舆论生态的异化风险。 关键词:生成式人工智能、虚假信息、舆论异化、智能治理 一、生成式人工智能虚假信息下…...

问题 | 对于初学者来说,esp32和stm32哪个比较适合?
对于初学者选择ESP32还是STM32入门嵌入式开发,需综合考虑学习目标、兴趣方向及未来职业规划。以下是两者的对比分析及建议: 1. 适合初学者的关键因素 ESP32的优势 内置无线通信:集成Wi-Fi和蓝牙功能,无需额外模块即可开发物联网…...

grafana/loki 部署搜集 k8s 集群日志
grafana/loki 和 grafana/loki-stack 的区别 Grafana 提供了多个 Helm Chart 用于在 Kubernetes 集群中部署 Loki 及相关组件,其中主要包括 grafana/loki 和 grafana/loki-stack。它们的主要区别如下: 1.grafana/loki Helm Chart: 专注于 Loki 部署: 该 Chart 专门…...

EN控制同步整流WD1020 ,3.0V-21V 的宽 VIN 输入范围,0.9V-20V 的宽输出电压范围
WD1020 是一款功能强大且性能卓越的电源管理芯片,凭借其独特的特点在众多电子设备领域中展现出广泛的应用前景。以下是对其特点和应用电路的详细阐述: 集成式功率 MOSFET:WD1020 集成了低 RDS(开)功率 MOSFETÿ…...

asm汇编语言源代码之-获取环境变量
提供1个子程序: 1. 读取环境变量 GETENVSTR 具体功能及参数描述如下 GETENVSTR PROC FAR ;IN: DSPSP SEG. ; ES:BX -> ENV VAR NAME ;OUT: DS:DX -> ENV VAR VALUE; IF DX0FFFFH, NOT FOUND ; more source code at http://www.ahjoe.com/source/srcdown.aspPU…...

2025认证杯一阶段各题需要使用的模型或算法(冲刺阶段)
A题(小行星轨迹预测) 问题一:三角测量法、最小二乘法、空间几何算法、最优化方法 问题二:Gauss/Laplace轨道确定方法、差分校正法、数值积分算法(如Runge-Kutta法)、卡尔曼滤波器 B题(谣言在…...
①(PROFINET 转 EtherNet/IP)EtherCAT/Ethernet/IP/Profinet/ModbusTCP协议互转工业串口网关
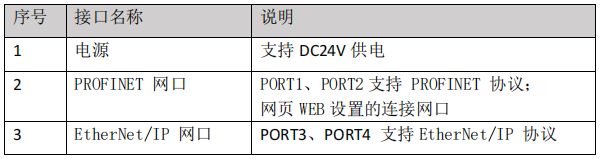
型号 协议转换通信网关 PROFINET 转 EtherNet/IP MS-GW32 概述 MS-GW32 是 PROFINET 和 EtherNet/IP 协议转换网关,为用户提供两种不同通讯协议的 PLC 进行数据交互的解决方案,可以轻松容易将 EtherNet/IP 网络接入 PROFINET 网络中,方便…...

LeetCode 3272.统计好整数的数目:枚举+排列组合+哈希表
【LetMeFly】3272.统计好整数的数目:枚举排列组合哈希表 力扣题目链接:https://leetcode.cn/problems/find-the-count-of-good-integers/ 给你两个 正 整数 n 和 k 。 如果一个整数 x 满足以下条件,那么它被称为 k 回文 整数 。 x 是一个…...

Linux中的tar -P选项
tar -P选项 Linux中的tar命令可用于文件和目录的归档以及压缩解压缩。而其中的-P选项是什么含义呢?下面我们就来看一看 1、不添加-P选项 对于如下压缩命令: tar -czvf pkg.tar.gz /opt/software执行该命名,控制台首行输出将会提示…...

Linux目录探秘:文件系统的核心架构
引言 Linux文件系统就像一棵精心设计的大树🌳,每个分支都有其特定的用途和规范。与Windows不同,Linux采用单一的目录结构,所有设备、分区和网络资源都挂载在这个统一的目录树下。本文将带你深入探索Linux目录结构的奥秘ÿ…...

国标GB28181视频平台EasyCVR如何搭建汽车修理厂远程视频网络监控方案
一、背景分析 近年我国汽车保有量持续攀升,与之相伴的汽车保养维修需求也逐渐提高。随着社会经济的发展,消费者对汽车维修服务质量的要求越来越高,这使得汽车维修店的安全防范与人员管理问题面临着巨大挑战。 多数汽车维修店分布分散&#…...

python【标准库】multiprocessing
文章目录 介绍多进程Process 创建子进程共享内存数据多进程通信Pool创建子进程多进程案例多进程注意事项介绍 python3.10.17版本multiprocessing 是一个多进程标准模块,使用类似于threading模块的API创建子进程,充分利用多核CPU来并行处理任务。提供本地、远程的并发,高效避…...

南墙WAF非标端口防护实战解析——指定端口安全策略深度剖析
本文系统解析非标端口DDoS攻击防护难点,重点阐述南墙WAF在指定端口防御中的技术突破。通过某金融机构真实攻防案例,结合Gartner最新防御架构模型,揭示如何构建基于智能流量建模的精准防护体系,为金融、政务等关键领域提供可落地的…...
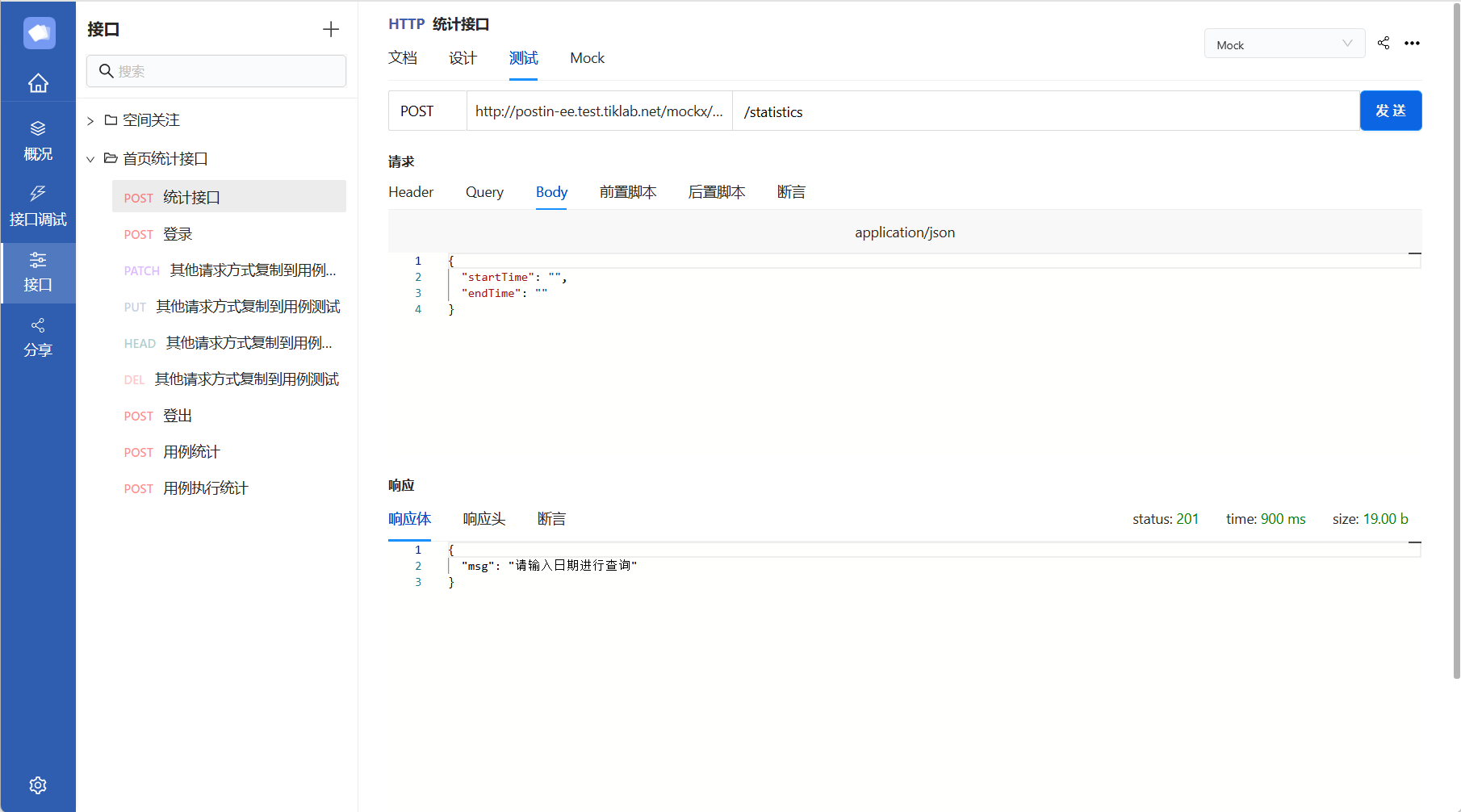
PostIn安装及入门教程
PostIn是一款国产开源免费的接口管理工具,包含项目管理、接口调试、接口文档设计、接口数据MOCK等模块,支持常见的HTTP协议、websocket协议等,支持免登陆本地接口调试,本文将介绍如何快速安装配置及入门使用教程。 1、安装 私有…...
spring cloud微服务API网关详解及各种解决方案详解
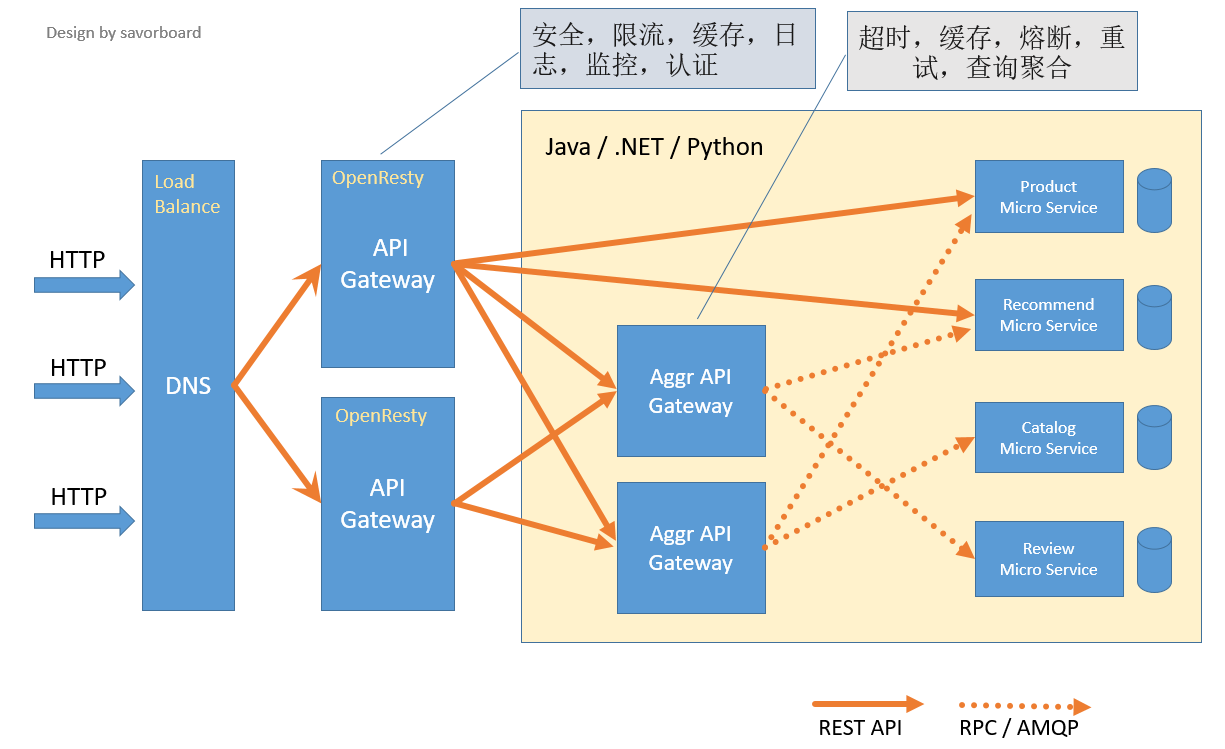
微服务API网关详解 1. 核心概念 定义:API网关作为微服务的统一入口,负责请求路由、认证、限流、监控等功能,简化客户端与后端服务的交互。核心功能: 路由与转发:将请求分发到对应服务。协议转换:HTTP/HTTP…...
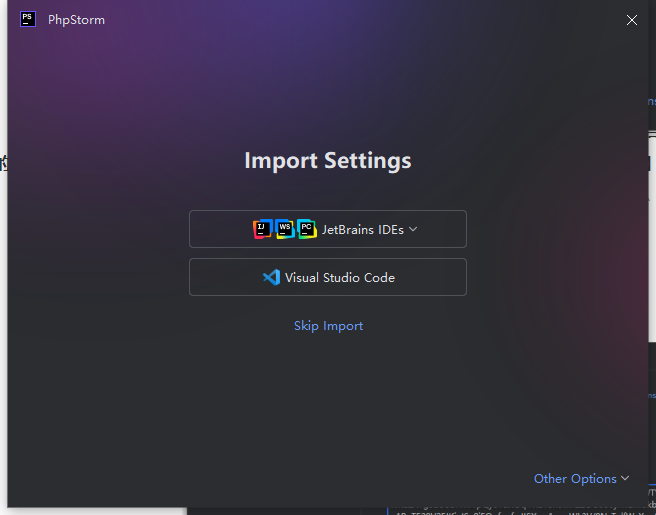
最新版PhpStorm超详细图文安装教程,带补丁包(2025最新版保姆级教程)
目录 前言 一、PhpStorm最新版下载 二、PhpStorm安装 三、PhpStorm补丁 四、运行PhpStorm 前言 PhpStorm 是 JetBrains 公司推出的 专业 PHP 集成开发环境(IDE),专为提升 PHP 开发效率设计。其核心功能包括智能代码补全、实时语法错误检…...

FileInputStream 详解与记忆方法
FileInputStream 详解与记忆方法 一、FileInputStream 核心概念 FileInputStream 是 Java 中用于从文件读取原始字节的类,继承自 InputStream 抽象类。 1. 核心特点 特性说明继承关系InputStream → FileInputStream数据单位字节(8bit)用…...

【计算机网络】同步操作 vs 异步操作:核心区别与实战场景解析
📌 引言 在网络通信和分布式系统中,**同步(Synchronous)和异步(Asynchronous)**是两种基础却易混淆的操作模式。本文将通过代码示例、生活类比和对比表格,帮你彻底理解它们的区别与应用场景。 1…...
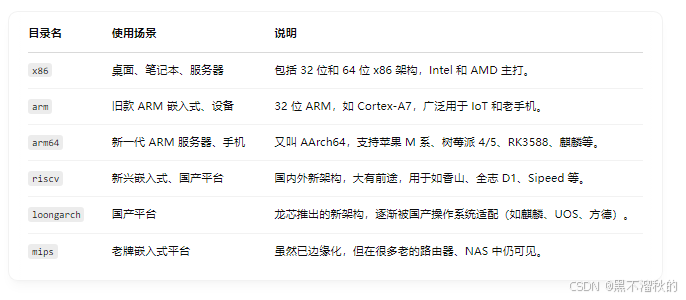
linux kernel arch 目录介绍
一:arch 目录 二:常用arch...

ES6变量声明:let、var、const全面解析
一、引言 ECMAScript 6(简称 ES6)的发布为 JavaScript 带来了许多革命性的变化,其中变量声明方式的更新尤为重要。let、var和const成为开发者日常编码中频繁使用的关键字。 本文将深入解析这三种声明方式的核心特性、区别及最佳实践ÿ…...

Linux 入门八:Linux 多进程
一、概述 1.1 什么是进程? 在 Linux 系统中,进程是程序的一次动态执行过程。程序是静态的可执行文件,而进程是程序运行时的实例,系统会为其分配内存、CPU 时间片等资源。例如,输入 ls 命令时,系统创建进程…...
单调栈 —— 1.基本概念与核心算法
1. 基本概念 1.1 知识预备 在理解单调栈之前,我们需要先掌握两个基础概念:栈(Stack) 和 单调性(Monotonicity)。 什么是栈(Stack) 栈是一种**后进先出(LIFO, Last-In…...
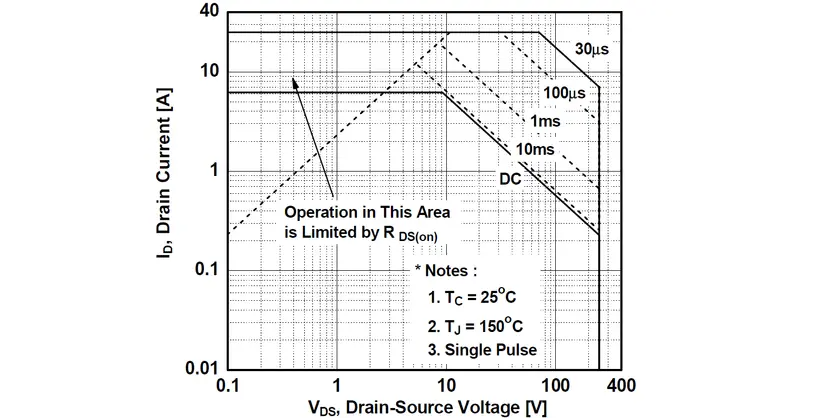
工程师 - 场效应管分类
What Are the Different Types of FETs? Pulse Octopart Staff Jul 31, 2021 Field effect transistors (FETs) are today’s workhorses for digital logic, but they enjoy plenty of applications outside of digital integrated circuits, everything from motor driver…...

用infoNCE微调Embedding模型
infoNCE 代码1:(样本格式为query_n个positive_n个hardnegative) PairwiseModel并不是模型,而是连接model和loss的一个包装类。 PairwiseModel接收两种类型样本 【query pos pair】or【query pos neg triplet】。 CrossEntropy…...

Debezium报错处理系列之第128篇:增量快照报错java.lang.OutOfMemoryError: Java heap space
Debezium报错处理系列之第128篇:增量快照报错java.lang.OutOfMemoryError: Java heap space 一、完整报错二、错误原因三、解决方法Debezium从入门到精通系列之:研究Debezium技术遇到的各种错误解决方法汇总: Debezium从入门到精通系列之:百篇系列文章汇总之研究Debezium技…...
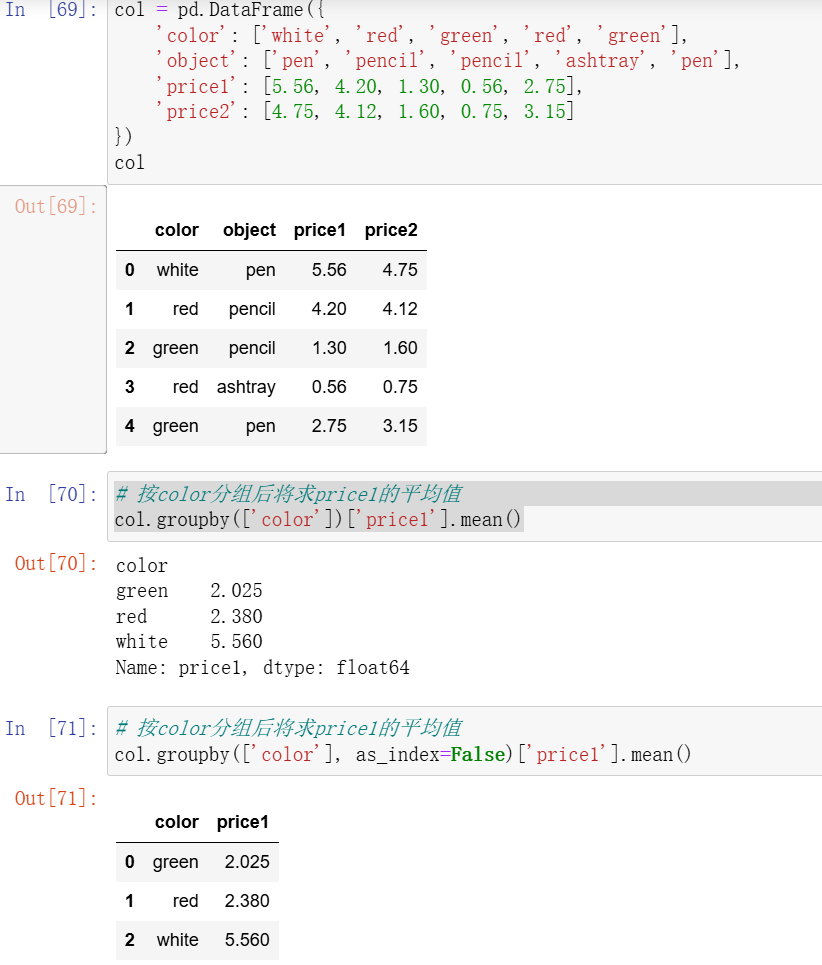
AI——使用pandas
文章目录 1、pandas介绍2、为什么使用pandas3、pandas的数据结构1、Series2、DataFrame3、MultiIndex 4、pandas基本数据操作1、索引操作2、赋值操作3、排序4、算术运算5、逻辑运算6、逻辑运算函数7、统计函数8、累计统计函数9、自定义运算 5、pandas读取文件和存储1、csv文件2…...