Ubuntu18.04 ROS Melodic安装
环境配置:Ubuntu18.04 ROS Melodic安装_ubuntu18.04安装ros melodic-CSDN博客
1 设置安装源
为了安装ROS Melodic,首先需要在Ubuntu 18.04 LTS上添加安装源到source.list,方法如下:
国外的:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
1
国内的:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
1
清华的:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
1
2 添加秘钥
2.1 添加秘钥
添加秘钥到本地的trusted数据库中并加以验证,方法如下:
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
1
若密钥服务器hkp://ha.pool.sks-keyservers.net:80无法添加成功,则可以尝试hkp://pgp.mit.edu:80或者hkp://keyserver.ubuntu.com:80。
2.2 安装公钥
在更新之前,需要安装公钥,否则无法验证签名,这一步也是原书没有的,需要朋友们注意,命令如下:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
1
3 安装
sudo apt-get update
1
sudo apt-get install ros-melodic-desktop-full
1
sudo apt-get install ros-melodic-rqt*
1
4 初始化rosdep
这一步或多或少因为在国内都会出现网络问题,参考以下文章:
Ubuntu 18.04 安装 ROS Melodic 中 sudo rosdep init 和 rosdep update 一定能成功的方法
尝试直接科学上网测试也不行,最终不知道怎么的多试了几次就ok了。
当显示rosdep update就基本成功了,接下来:
这个错误就是网络问题造成的,理论上换成手机热点就可以。但还是要多试几次。
💡 当执行sudo rosdep init,反馈没有该指令。我在网上查找的一个方法是:在终端输入rosdep init,终端提示安装"sudo apt install python-rosdep2 " ,按照提示安装后,确实可以执行sudo rosdep init。但是sudo apt install python-rosdep2会导致之前sudo apt-get install ros-melodic-desktop-full安装的包部分丢失(这是后面才意识到的问题),执行楼主所有步骤后,发现没有roscore这个指令,所以还要重新执行sudo apt-get install ros-melodic-desktop-full,就有roscore指令了。
添加右侧的文件夹,然后改动rosdep中的文件链接地址为本地,然后改动init的py文件为本地即可。
sudo gedit /usr/lib/python2.7/dist-packages/rosdistro/**init**.py
5 安装rosinstall
sudo apt-get install python-rosinstall
1
这一步并没有成功,但似乎也没有影响到后面的进展?
6 加载环境设置文件
source /opt/ros/melodic/setup.bash
1
7 创建并初始化工作目录
ROS使用一个名为catkin的ROS专用构建系统。为了使用它,用户需要创建并初始化
catkin工作目录,如下所示。除非用户创建新的工作目录,否则此设置只需设置一次。
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
1
2
3
4
5
目前,只有src目录和CMakeLists.txt文件在catkin工作目录中,使用catkin_make命令来构建
cd ~/catkin_ws/
catkin_make
1
2
3
8 设置环境变量(略过)
sudo apt install net-tools
1
gedit ~/.bashrc
1
这里操作过程中直接跳到了下一步,并没有用,需要注意!
# Set ROS melodic
source /opt/ros/melodic/setup.bash
source ~/catkin_ws/devel/setup.bash
# Set ROS Network
#ifconfig查看你的电脑ip地址
export ROS_HOSTNAME=192.168.89.135
export ROS_MASTER_URI=http://${ROS_HOSTNAME}:11311
# Set ROS alias command 快捷指令
alias cw='cd ~/catkin_ws'
alias cs='cd ~/catkin_ws/src'
alias cm='cd ~/catkin_ws && catkin_make'
1
2
3
4
5
6
7
8
9
10
11
12
13
💡 当执行sudo rosdep init,反馈没有该指令。我在网上查找的一个方法是:在终端输入rosdep init,终端提示安装"sudo apt install python-rosdep2 " ,按照提示安装后,确实可以执行sudo rosdep init。但是sudo apt install python-rosdep2会导致之前sudo apt-get install ros-melodic-desktop-full安装的包部分丢失(这是后面才意识到的问题),执行楼主所有步骤后,发现没有roscore这个指令,所以还要重新执行sudo apt-get install ros-melodic-desktop-full,就有roscore指令了。
9 配置ROS环境变量
第八步的操作确实是有点迷(第八步确实有用,在roscore没反应的时候,需要重新执行一次最开始的sudo apt-get install ros-melodic-desktop-full),所以就直接跳过了,这里的操作也可以直接用。
默认情况下,ROS_HOME的路径为"~/.ros",该目录保存着日志文件和测试结果文件。另外,第一次启动ROS时,需要进行环境变量配置,命令如下:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
1
2
这两条指令相当于Windows系统中设置环境变量path,即在终端可以自由使用ROS系统指令,这里强调是系统指令,而不是自己创建的包或者节点,后者是需要使能相应的工作空间,具体可以参考:ROS工作空间。
查看环境变量是否设置正确,命令如下:
env | grep ROS
1
笔者查看环境变量结果如下:
ROS_ETC_DIR=/opt/ros/melodic/etc/ros
ROS_ROOT=/opt/ros/melodic/share/ros
ROS_VERSION=1
ROS_PYTHON_VERSION=2
ROS_PACKAGE_PATH=/opt/ros/melodic/share
ROS_DISTRO=melodic
1
2
3
4
5
6
至此,ROS的核心程序包安装完毕。
然后按下图执行命令:
10 启动运行小海龟例子
1.第一个终端运行如下命令
roscore
1
2.打开第二个终端,也可以利用 Ctrl+Shift+T 快捷键打开一个新的终端,运行如下命令,这时你会看见一只静止的小海龟
rosrun turtlesim turtlesim_node
1
3.如果希望小海龟能够移动,打开第三个终端,利用Ctrl+Shift+T快捷键再打开一个新的终端,启动turtlesim的键盘控制节点turtle_teleop_key,运行如下命令
rosrun turtlesim turtle_teleop_key
1
11 小结
时至今日,已经不再用上述如此复杂的方式来配置环境,但是希望这个过程可以给有需要的朋友一点启发和帮助。
Reference
————————————————
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
原文链接:https://blog.csdn.net/ningmoon/article/details/136049285
相关文章:

Ubuntu18.04 ROS Melodic安装
环境配置:Ubuntu18.04 ROS Melodic安装_ubuntu18.04安装ros melodic-CSDN博客 1 设置安装源 为了安装ROS Melodic,首先需要在Ubuntu 18.04 LTS上添加安装源到source.list,方法如下: 国外的: sudo sh -c echo "deb http://…...
阿里FPGA XCKU3P开箱- 25G 光纤
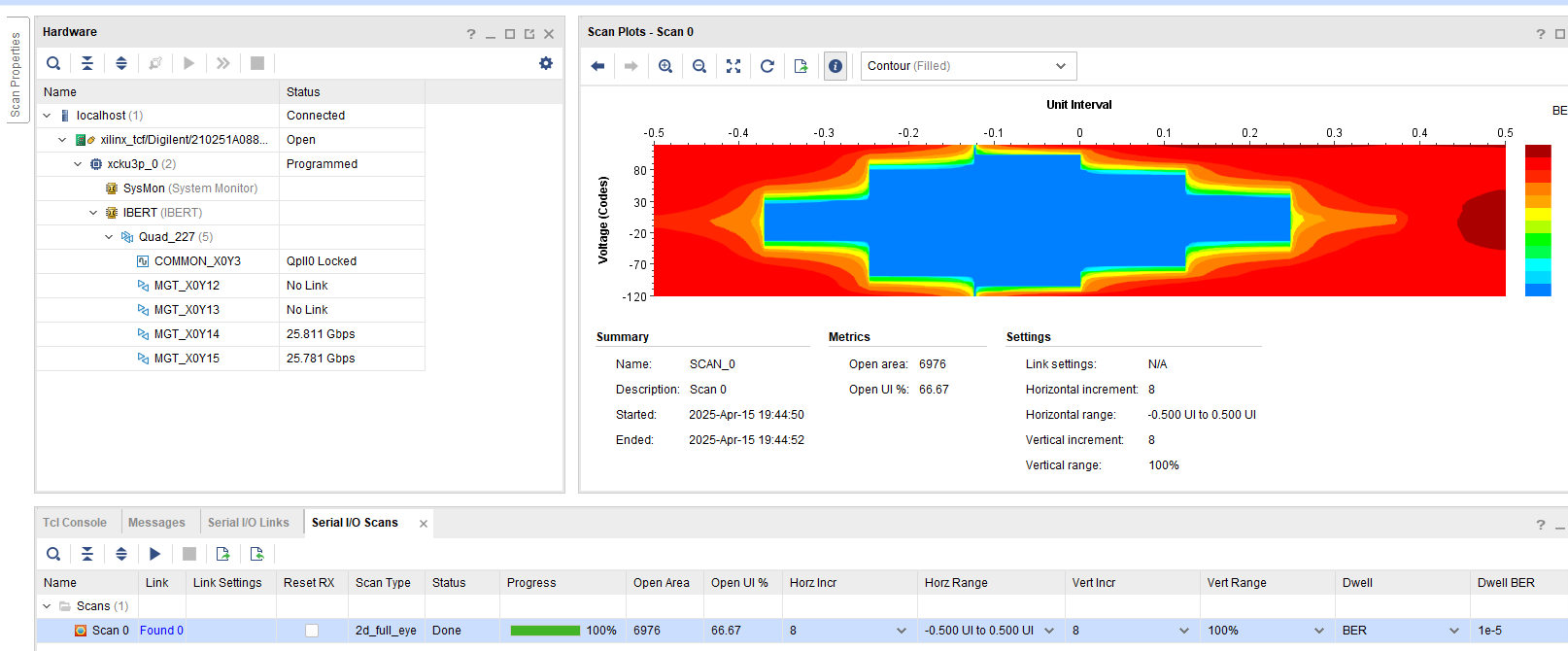
阿里FPGA XCKU3P开箱 - Hello-FPGA - 博客园 25G 光纤 板子有2个SFP的光纤接口,最大支持25G速率,使用ibert 进行验证,SFP在BANK227的GTY 接口。 ibert 配置如下: 测试 测试符合预期,确认了SFP的具体位置 和 支持的速…...

ArrayList vs LinkedList,HashMap vs TreeMap:如何选择最适合的集合类?
精心整理了最新的面试资料和简历模板,有需要的可以自行获取 点击前往百度网盘获取 点击前往夸克网盘获取 在 Java 开发中,集合类的选择直接影响程序的性能和代码的可维护性。不同的数据结构适用于不同的场景,盲目使用可能导致内存浪费、性能…...

uniapp的h5,打开的时候,标题会一闪而过应用名称,再显示当前页面的标题
问题: 微信小程序,通过webview打开了uniapp创建的h5,但是打开h5时,会先显示h5的应用名称,然后才切换为该页面的标题。 过程: 查过很多资料,有说修改应用名称,有说设置navigationS…...

玩转Docker | 使用Docker搭建Van-Nav导航站
玩转Docker | 使用Docker搭建Van-Nav导航站 前言一、Van-Nav介绍van-nav 简介主要特点二、系统要求环境要求环境检查Docker版本检查检查操作系统版本三、部署Van-Nav服务下载镜像创建容器检查容器状态检查服务端口安全设置四、访问Van-Nav应用访问Van-Nav首页登录后台管理五、添…...

Margin和Padding在WPF和CSS中的不同
CSS和WPF中 margin 与 padding 在方向上的规定基本一致,但在使用场景和一些细节上有所不同。 CSS - 方向规定: margin 和 padding 属性可以分别指定上、右、下、左四个方向的值。例如 margin:10px 20px 30px 40px; 表示上外边距为10px、右外边距为20…...
.NET Core DI(依赖注入)的生命周期及应用场景
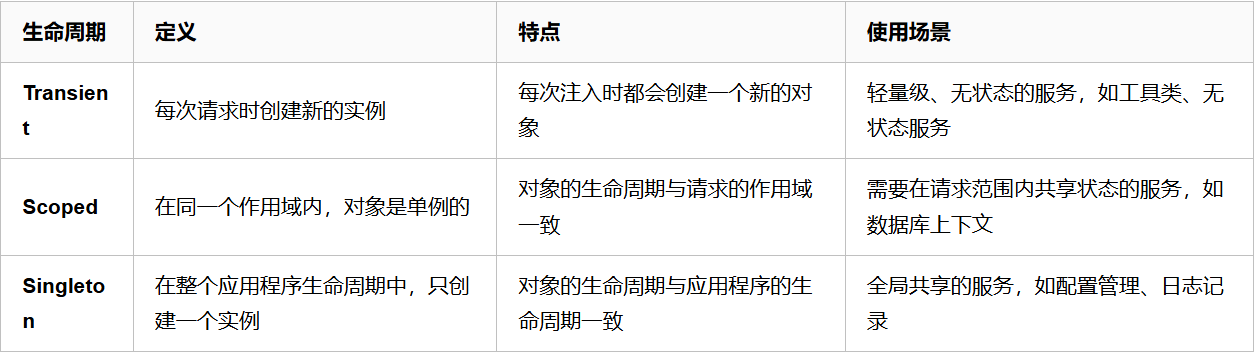
在.NET中,依赖注入(DI,Dependency Injection)是一种设计模式,它通过将依赖关系注入到类中,而不是让类自己创建依赖项,来降低类之间的耦合度。这使得代码更加模块化、灵活和易于测试。在.NET中&a…...

新技术学习方法
新技术学习方法 学习新技术的路线需要结合系统性规划与实践验证,以下是基于行业经验和学习科学整理的高效路径框架,适用于编程语言、开发框架、前沿技术等领域: 一、明确学习目标与动机(战略层) 场景化需求分析 明确…...

内网dns权威域名服务器搭建
目录 一、背景 二、dns简介 1、dns服务器类型 1、缓存域名服务器 2、主域名服务器 3、从域名服务器 2、dns解析过程 1、递归查询 2、迭代查询: 3、dns服务器类型 1、根域名服务器 2、顶级域名服务器 顶级域名可分为两类 顶级域名服务器的重要性体现在…...

爱普生SG2520VGN差分晶振5G基站的时钟解决方案
在 5G 通信时代,数据流量呈爆发式增长,5G 基站作为信号的核心中转枢纽,承载着前所未有的数据传输与处理重任。从海量的物联网设备连接,到高速移动用户的数据交互,每一个环节都对基站的性能提出了严苛要求。而精准稳定的…...

Linux中设置文件开机自启
###方法有很多,这里只分享一个systemd的方法 1.创建service文件 在/etc/systemd/system/下创建,自己命名,后缀是.service 创建方式有两种: 进入/etc/systemd/system创建,创建后使用sudo vim编辑使用sudo nano /etc/…...

C# 基类型和派生类型之间的转型
1.什么是基类型和派生类 基类型:父类,所有子类都继承自它。 派生类型:子类,继承了父类的属性和方法,还可以添加自己的新功能。 例子: class Animal { }//基类型 class Dog : Animal { }//派生类型 这…...
AWTK-MVVM 如何让多个View复用一个Model记录+关于app_conf的踩坑
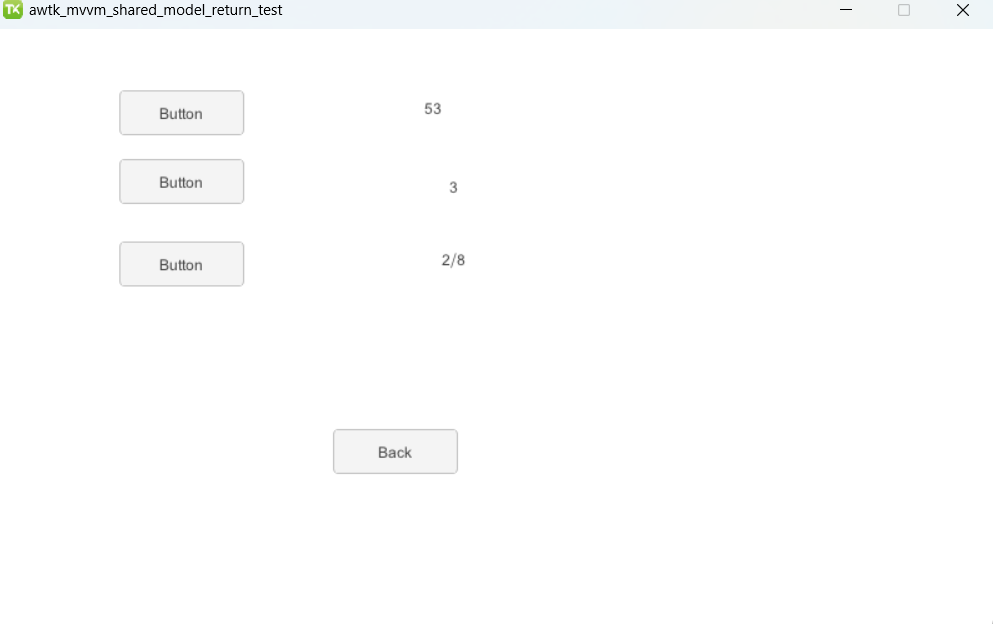
前言 有这么一个业务,主界面点击应用窗口进入声纳显示界面,声纳显示界面再通过按钮进入菜单界面,菜单界面有很多关于该声纳显示界面的设置项,比如量程,增益,时间显示,亮度,对比度等…...

MySQL视图相关
视图基础概念 定义:视图是一条SELECT语句执行后返回的结果集,是对若干基本表的引用,是一张虚表,不存储具体数据。特性:依赖基本表,基本表数据改变时视图数据也随之改变;限定条件下可进行增删改…...

blender 超逼真角色daz 纹理材质 humanpro插件
https://www.youtube.com/KhanhVo-zp9lh/featured https://superhivemarket.com/products/humanpro https://superhivemarket.com/products/humanpro HUMANPRO 插件 - BLENDER HumanPro 是一款专为帮助用户轻松快速地创建高度精细逼真的人体皮肤纹理和复杂皱纹而设计的插件…...

C++简易日志
文章目录 main.cppLog.hLog.cppClassAuxMacro.hSingleton.h main.cpp #include "Log.h"int main() {LogInfo << "main start";int i 1;double d 3.14;LogInfo << "i " << i << ", d " << d;getcha…...
kotlin音乐之自定义唱片组件(简单版本)
代码地址 import android.animation.ObjectAnimator import android.animation.ValueAnimator import android.content.Context import android.os.Binder import android.util.AttributeSet import android.view.animation.LinearInterpolator import androidx.appcompat.widg…...
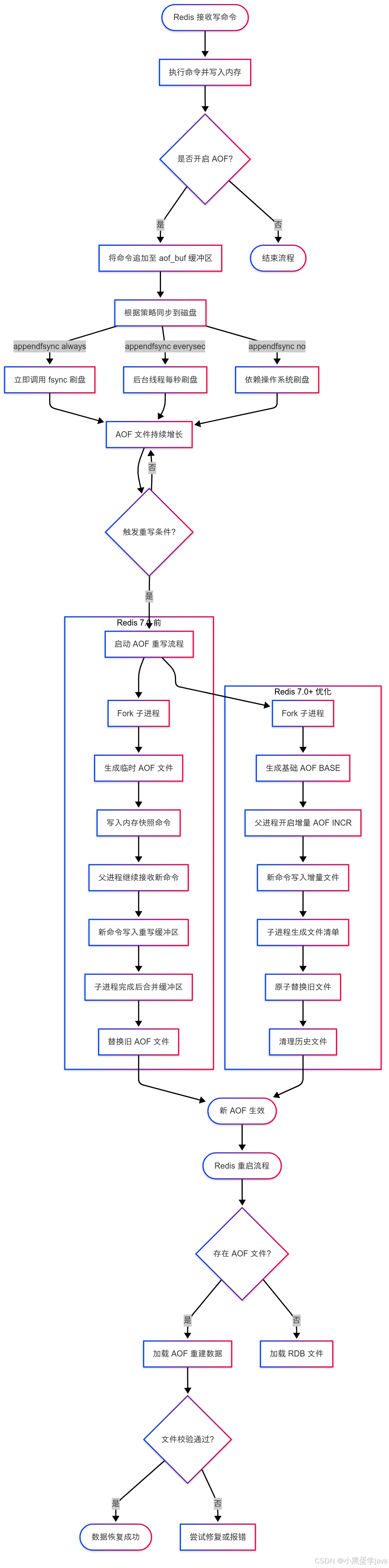
Redis 版本变更的变化
Redis 版本变更的变化 以下是 Redis 主要版本的清单及其核心功能变化的梳理,按时间顺序整理关键版本演进 8版本没有整理: Redis 1.0 (2009) 初始版本:发布首个稳定版本,支持基本键值存储。 核心特性: 支持字符串&…...

flink扫盲-调整checkpoint的时间会影响原来的state数据吗
一、核心结论 原 State 数据仍可用 只要作业的 拓扑结构(DAG) 和 状态类型(StateDescriptor) 未发生变更,旧的 Checkpoint 依然有效。Checkpoint 间隔调整仅影响 新生成的 Checkpoint…...

文本纠错WPS插件:提升文档质量的利器
文本纠错WPS插件:提升文档质量的利器 引言 在数字化办公日益普及的今天,文档的质量直接影响到我们的工作效率和形象。一个错别字或标点错误,可能就会让我们的专业形象大打折扣。今天,我要向大家介绍一款强大的WPS插件——文本纠…...

多光谱相机与高光谱相机的区别
多光谱相机与高光谱相机均属于光谱成像设备,但两者在光谱分辨率、波段数量、数据维度及应用场景上存在显著差异。以下是详细的对比分析: 一、核心差异对比 二、工作原理差异 多光谱相机 波段选择:根据目标物特性预设特定…...
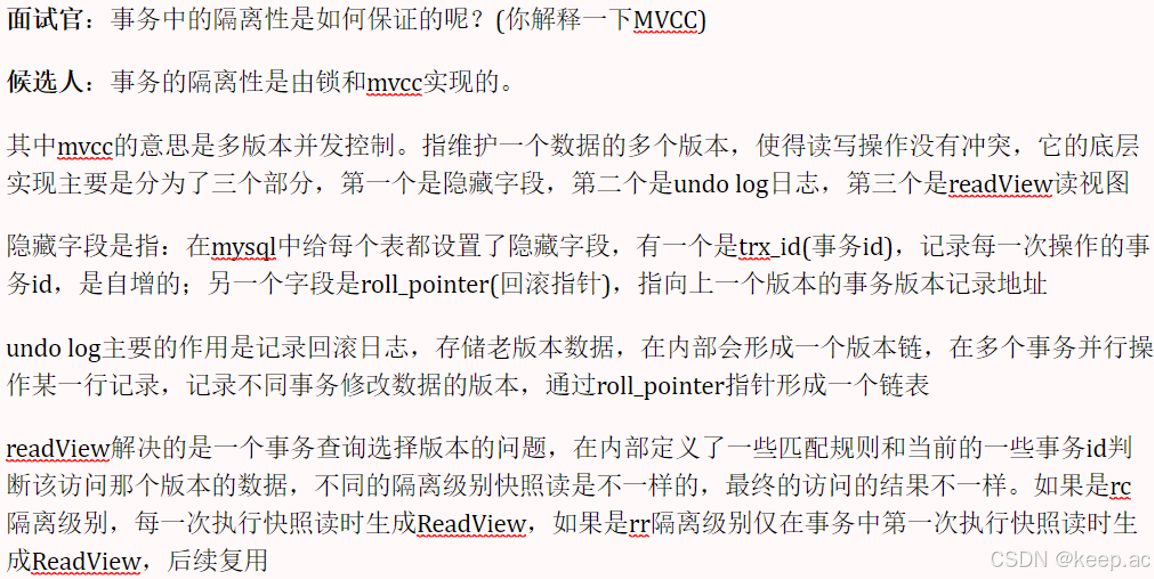
MVCC详细介绍及面试题
目录 1.什么是mvcc? 2.问题引入 3. MVCC实现原理? 3.1 隐藏字段 3.2 undo log 日志 3.2.1 undo log版本链 3.3 readview 3.3.1 当前读 编辑 3.3.2 快照读 3.3.3 ReadView中4个核心字段 3.3.4 版本数据链访问的规则(了解&#x…...
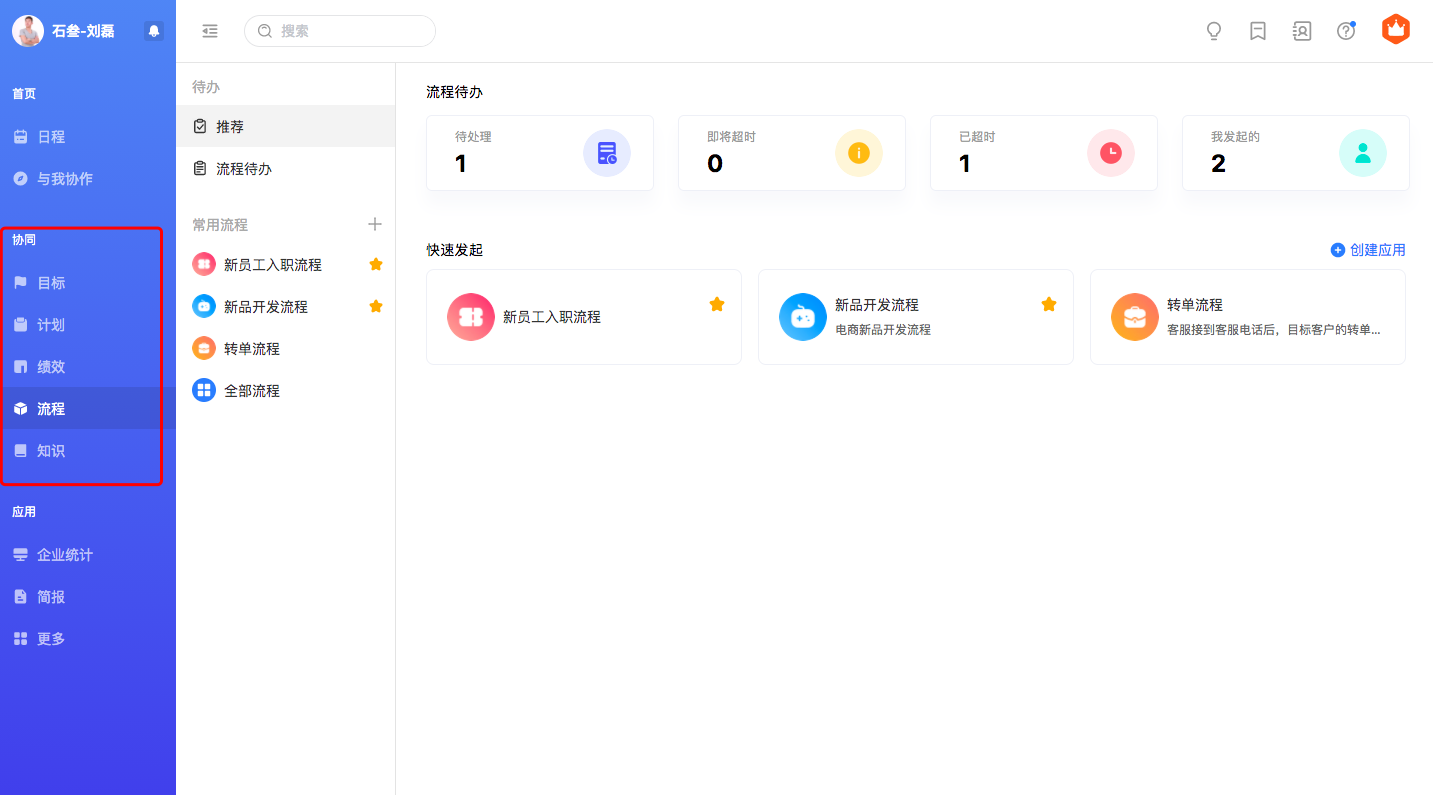
电商企业如何实现流程精细化?日事清「标准化+可视化+自动化」全流程管理实战解析
电商企业在业务快速发展中,往往会遇到如下问题: 1、店铺多款产品需要上新维护,但工作重点往往不清晰,员工经常忘记,没做也不当回事; 2、员工做事经常错漏细节,犯低级错误; 3、人员…...
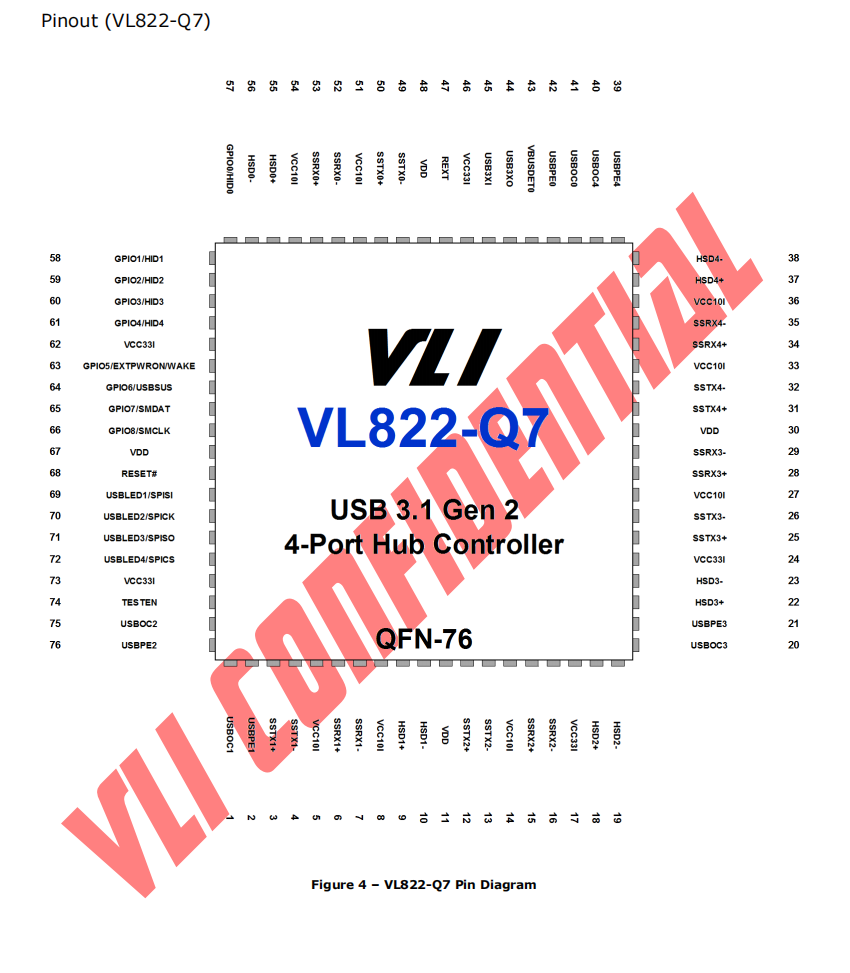
威锋VL822-Q7T10GHUB芯片适用于扩展坞显示器
一、概述 VL822-Q7T是VIA Lab(威盛电子旗下专注于USB相关技术研发的子公司)精心打造的一款高性能USB 3.1 Gen2集线器控制器芯片。在当今数字化时代,USB接口作为设备连接与数据传输的核心通道,其性能与稳定性至关重要。VL822-Q7T凭…...
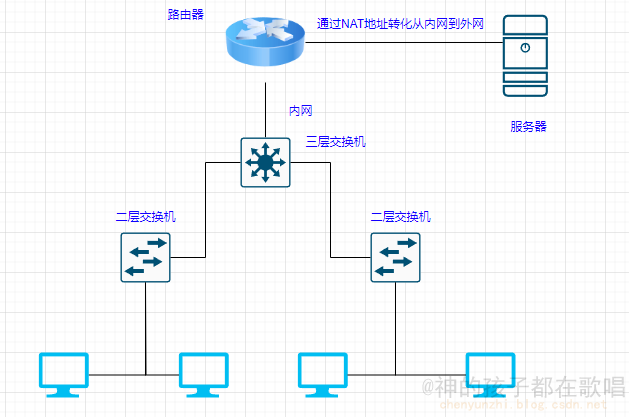
交换机与路由器的默契配合:它们的联系与区别
交换机与路由器的默契配合:它们的联系与区别 一. 交换机与路由器的基本功能1.1 交换机的功能1.2 路由器的功能 二. 交换机和路由器的区别三. 交换机和路由器的联系3.1 数据转发的协作3.2 网络分段与分隔3.3 协同工作提供互联网接入 四. 交换机和路由器的联合应用场景…...

Git提交规范及最佳实践
Git 提交规范通常是为了提高代码提交的可读性、可维护性和自动化效率(如生成 ChangeLog)。以下是常见的 Conventional Commits 规范,结合社区最佳实践总结而成: 1. 提交格式 每次提交的 commit message 应包含三部分:…...

Ubuntu 常用命令行指令
1. 文件与目录操作 命令作用示例ls列出目录内容ls -l(详细列表)cd切换目录cd ~/Documentspwd显示当前目录路径pwdmkdir创建目录mkdir new_folderrm删除文件rm file.txtrm -r递归删除目录rm -r old_dircp复制文件cp file.txt backup/mv移动/重命名文件mv…...
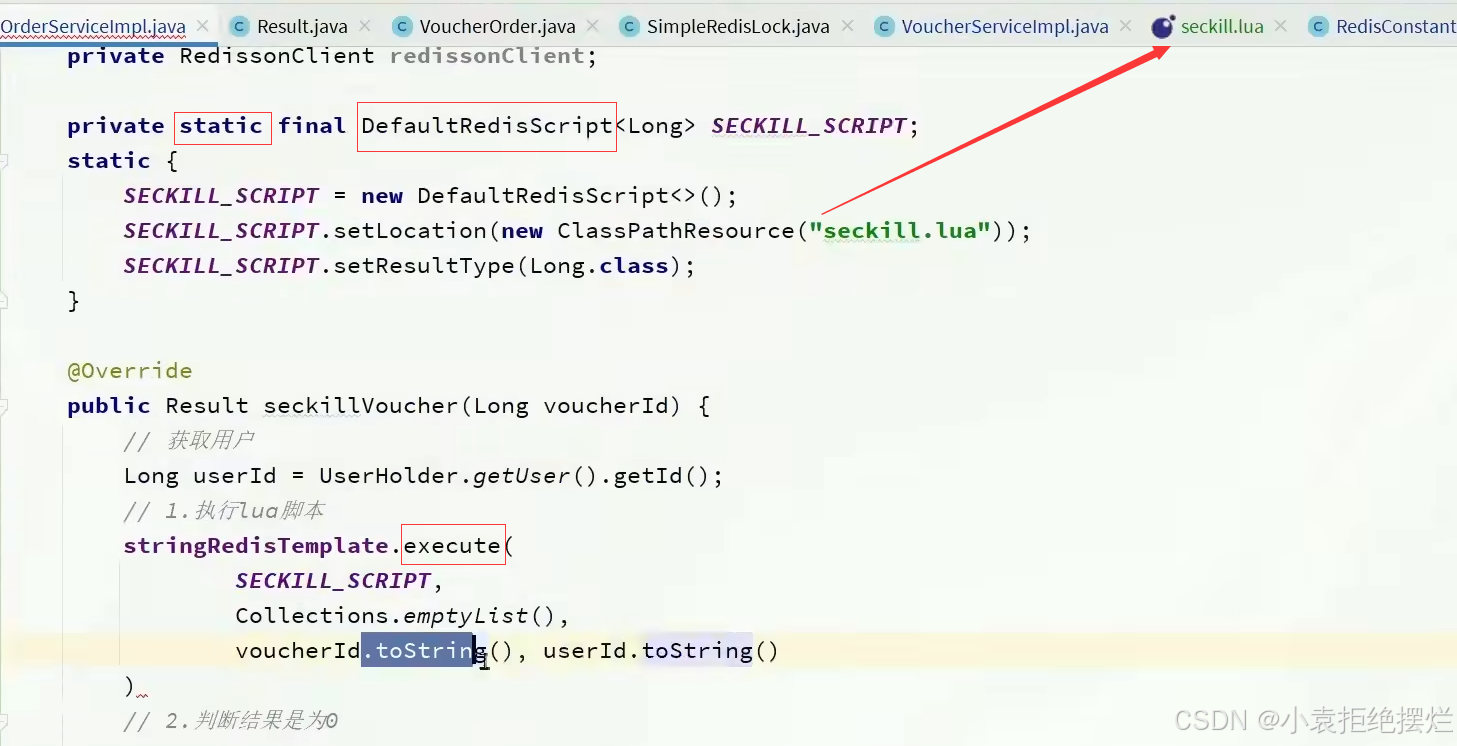
Redis 分布式锁+秒杀异步优化
文章目录 问题思路setnx实现锁误删问题和解决方案Redis Lua脚本问题引出解决方案 setnx实现的问题Redission快速入门redission可重入锁原理 秒杀优化(异步优化)异步秒杀思路秒杀资格判断Redis消息队列 问题 比如我们两个机器都部署了我们项目,这里nginx使用轮询的方…...
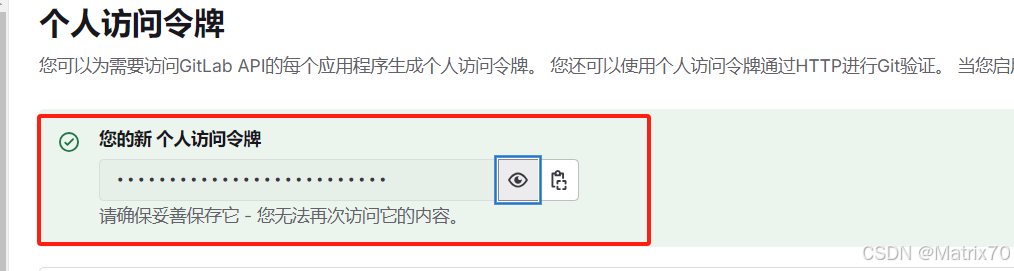
Git_获取GitLab的token方法(访问令牌)
一、操作步骤 GitLab-获取token(访问令牌)主要步骤:以及相关截图 登录 GitLab 打开 GitLab 网站并登录你的账号。 进入用户设置 点击右上角头像 → Edit profile → 左侧菜单选择 Access Tokens。 创建 Token Token name: 输入名称&#…...

【生活相关-日语-日本-东京-留学生-搬家后或新入驻-水道局申请饮用水(1)-办理手续】
【生活相关-日语-日本-东京-搬家后-水道局申请饮用水-办理手续】 1、前言2、情况说明(1)他人代办(2)打电话(3)网络申请(4)你将会面临什么,主要步骤(5…...