如何判断单片机性能极限?
目录
1、CPU 负载
2、内存使用情况
3、实时性能
4、外设带宽
5、功耗与温度
在嵌入式系统设计中,当系统变得复杂、功能增加时,单片机可能会逐渐逼近其性能极限。及时识别这些极限点对于保证产品质量、稳定性和用户体验至关重要。
当你的嵌入式系统出现以下一个或多个迹象时,可以认为单片机的性能已经达到或接近极限:
- CPU 负载持续 > 80-90%,且系统响应迟缓。
- 可用 RAM 极低,频繁发生
malloc失败或出现栈溢出迹象。 - 关键实时任务错过 Deadline,或响应时间/抖动超出容忍范围。
- 外设数据处理不过来,导致数据丢失或通信错误。
- Flash 空间几乎耗尽,无法添加新功能或进行 OTA。
- 功耗异常高,温度持续接近或超过规格上限。
- 系统稳定性下降,出现不明原因的卡顿、复位或崩溃。
1、CPU 负载
CPU 负载是指 CPU 在单位时间内用于执行任务的时间比例。这是衡量 MCU 繁忙程度最直接的指标。
CPU 负载长时间(例如,几秒或更长)持续在 80% 以上,尤其是在峰值负载时接近 100%。系统对外部事件(如按键、传感器中断)的响应明显变慢。低优先级任务长时间得不到执行机会。
在实时操作系统 (RTOS) 中,通常会有一个最低优先级的空闲任务。通过测量空闲任务获得执行时间的比例,可以反推出 CPU 的负载。最简单的办法,在系统的空闲循环(或 RTOS 的空闲任务)中,让一个 GPIO 引脚输出高电平,在所有其他任务执行时,让该 GPIO 输出低电平。使用示波器或逻辑分析仪观察这个 GPIO 引脚的波形。高电平持续时间占总时间的百分比就是 CPU 的空闲时间百分比。
// 假设 PIN_CPU_LOAD 连接到示波器
#define PIN_CPU_LOAD PA0 void IdleLoop() {while(1) {// 进入空闲状态,拉高引脚SetPinHigh(PIN_CPU_LOAD); // 短暂延时或等待事件,模拟空闲操作WaitForEventOrDelay(); // 退出空闲(即使没有任务切换,也模拟检查点)SetPinLow(PIN_CPU_LOAD); // 让其他任务有机会运行(如果是非抢占式或协作式)Yield(); }
}void Task_A() {while(1) {// 任务执行前(或周期性),拉低引脚SetPinLow(PIN_CPU_LOAD); // ... 执行任务 A 的代码 ...TaskDelay(TASK_A_PERIOD);}
}void Task_B() {while(1) {// 任务执行前(或周期性),拉低引脚SetPinLow(PIN_CPU_LOAD); // ... 执行任务 B 的代码 ...TaskDelay(TASK_B_PERIOD);}
}// 在主函数或 RTOS 启动时初始化引脚并启动任务/空闲循环
int main() {InitializeGPIO(PIN_CPU_LOAD, OUTPUT);SetPinLow(PIN_CPU_LOAD); // 初始为低// 如果使用 RTOS// CreateTask(Task_A);// CreateTask(Task_B);// StartScheduler(); // RTOS 会自动处理空闲任务// 如果是裸机或简单循环// InitializeOtherThings();// StartInterrupts();// IdleLoop(); // 或者是一个包含任务调度逻辑的主循环return 0;
}
现在许多商业或开源 RTOS 提供了内建的 CPU 负载统计功能,可以直接调用 API 获取。
2、内存使用情况
内存分为 Flash(程序存储)和 RAM(数据存储)。两者耗尽都会导致严重问题。
Flash 使用率接近 100%。这会导致无法添加新功能、无法进行 OTA (Over-the-Air) 升级(因为需要空间存储新固件),甚至无法进行调试(调试信息也占用空间)。
如果可用 RAM 持续很低,系统应对峰值需求(如处理大数据包、复杂算法临时变量)的能力会很差,容易在压力下崩溃。
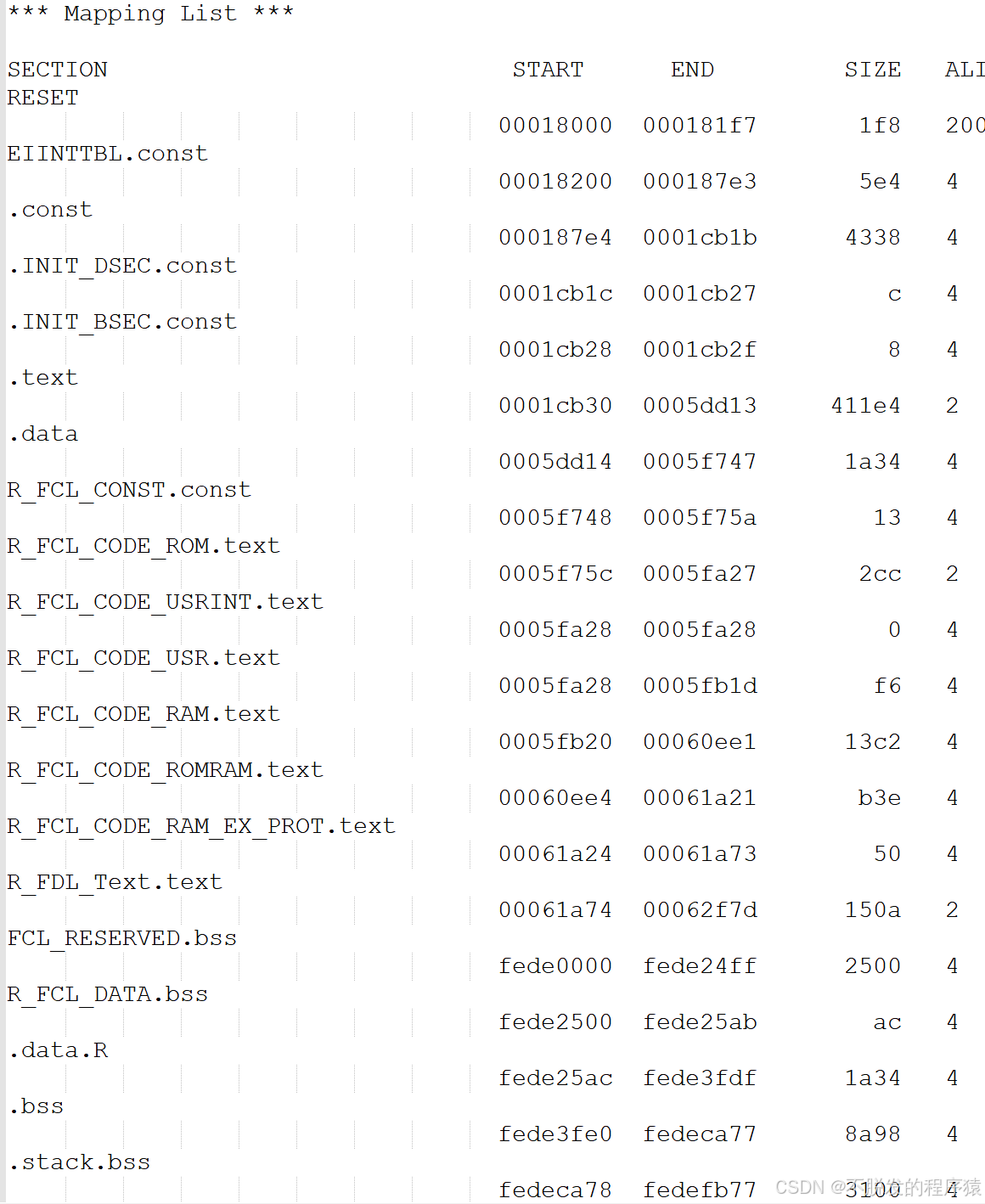
查看编译器/链接器生成的 Map 文件它会详细列出代码段 (.text)、只读数据段 (.rodata) 等占用的 Flash 大小,查看 .data 和 .bss 段的RAM大小。
许多 MCU 和 RTOS 提供了硬件(如 MPU - Memory Protection Unit)或软件(如 Stack Painting/Watermarking)机制来检测栈是否溢出。Stack Painting 是在任务创建时,将其栈空间填充一个特殊值(如 0xCDCDCDCD),然后周期性检查栈底有多少这个值被覆盖了,从而了解栈的最大使用深度。
#define STACK_FILL_PATTERN 0xCDCDCDCD
#define TASK_STACK_SIZE 1024 // Bytesuint8_t task_stack[TASK_STACK_SIZE];void InitializeTaskStack(uint8_t* stack_ptr, uint32_t stack_size) {uint32_t* pStack = (uint32_t*)stack_ptr;for (uint32_t i = 0; i < stack_size / sizeof(uint32_t); ++i) {pStack[i] = STACK_FILL_PATTERN;}
}// 在任务创建时调用 InitializeTaskStack(task_stack, TASK_STACK_SIZE);// 周期性检查函数
uint32_t CheckStackHighWaterMark(uint8_t* stack_base, uint32_t stack_size) {uint32_t* pStack = (uint32_t*)stack_base;uint32_t unused_words = 0;// 从栈底向上检查,直到找到第一个非填充值for (uint32_t i = 0; i < stack_size / sizeof(uint32_t); ++i) {if (pStack[i] == STACK_FILL_PATTERN) {unused_words++;} else {break; // 已经到达被使用的区域}}uint32_t used_bytes = stack_size - (unused_words * sizeof(uint32_t));return used_bytes;
}// 在监控任务或调试时调用
// uint32_t max_stack_usage = CheckStackHighWaterMark(task_stack, TASK_STACK_SIZE);
// printf("Task stack usage: %u bytes\n", max_stack_usage); 3、实时性能
对于需要精确时间响应的系统(如控制系统、通信协议栈),实时性能至关重要。
关键指标:
- 中断延迟: 从中断请求发生到中断服务程序 (ISR) 第一条指令开始执行的时间。
- 任务响应时间: 从事件发生(如中断、信号量释放)到相应处理任务开始执行的时间。
- 任务完成时间: 从任务开始执行到任务完成的时间。
- 抖动: 同一个事件的响应时间或完成时间的变化量。
在关键时间点(如中断入口/出口、任务开始/结束、事件触发点)翻转 GPIO,用示波器或逻辑分析仪精确测量时间间隔。这是最常用且直观的方法。
// 假设 PIN_ISR_ENTRY 连接到示波器通道 1
// 假设 PIN_INT_TRIGGER 连接到示波器通道 2 (用于观察外部触发)
#define PIN_ISR_ENTRY PB0
#define PIN_INT_TRIGGER PC5 // 假设外部事件触发此引脚中断volatile uint64_t start_time = 0;
volatile uint64_t isr_entry_time = 0;
volatile uint32_t latency = 0;// 中断服务程序
void EXTI5_IRQHandler(void) {// 第一件事:拉高引脚,标记 ISR 入口SetPinHigh(PIN_ISR_ENTRY);isr_entry_time = GetHighResolutionTimestamp(); // 获取时间戳// 计算延迟 (如果需要软件计算的话)// 注意:这里的 start_time 需要在触发中断的代码附近获取,// 且要考虑 GetHighResolutionTimestamp 本身的开销// latency = isr_entry_time - start_time; // ... 处理中断 ...// 清除中断标志位ClearInterruptFlag(EXTI_LINE_5);// 最后:拉低引脚,标记 ISR 出口SetPinLow(PIN_ISR_ENTRY);
}int main() {InitializeGPIO(PIN_ISR_ENTRY, OUTPUT);SetPinLow(PIN_ISR_ENTRY); // 初始为低InitializeGPIO(PIN_INT_TRIGGER, INPUT_INTERRUPT); // 配置为中断输入ConfigureInterrupt(EXTI_LINE_5, RISING_EDGE, EXTI5_IRQHandler);EnableInterrupt(EXTI_LINE_5);EnableGlobalInterrupts();while(1) {// ... 主循环任务 ...// 模拟触发中断 (或者等待外部物理触发 PIN_INT_TRIGGER)// 如果是软件触发测试:// start_time = GetHighResolutionTimestamp(); // 记录触发前时间戳// TriggerSoftwareInterrupt(EXTI_LINE_5); // 等待外部触发时,示波器直接测量 PIN_INT_TRIGGER 上升沿// 到 PIN_ISR_ENTRY 上升沿的时间差即可得到硬件中断延迟。}return 0;
}如 Segger SystemView、Tracealyzer 等工具可以提供非常详细的系统事件追踪,包括中断、任务切换、API 调用等,并自动分析时间性能。
4、外设带宽
有时瓶颈不在 CPU 或内存,而在于外设(如 UART, SPI, I2C, ADC, DAC, USB 等)的数据处理能力。
如何测量:
- 理论计算: 根据外设的时钟频率、配置(如波特率、采样率)计算理论上的最大数据传输速率。
- 实际吞吐量测试: 在特定时间内发送或接收大量数据,统计实际成功传输的数据量,计算实际速率。
- 缓冲区监控: 检查外设驱动程序的发送/接收缓冲区是否经常处于满或空的状态。例如,UART 接收缓冲区频繁溢出,表明 CPU 处理数据的速度跟不上接收速度。
- DMA 效率: 如果使用 DMA,检查 DMA 传输完成所需时间以及 DMA 控制器本身的负载(如果可测量)。
5、功耗与温度
虽然不是直接的计算性能指标,但异常的功耗和温度升高往往是系统超负荷运行的副作用。
如何测量:
- 功耗: 使用精密电源分析仪或在电源路径上串联采样电阻,用示波器或万用表测量电压降,计算电流和功耗。
- 温度: 使用 MCU 内建的温度传感器(如果有)或外部热电偶、红外热像仪测量芯片表面温度。
遇到性能瓶颈时,需要进行详细的性能分析来定位具体问题所在,然后采取针对性的优化措施(算法优化、代码优化、编译器优化、使用 DMA、调整任务优先级等)。如果优化后仍无法满足需求,那么可能就需要考虑升级到性能更强的单片机了。
相关文章:
如何判断单片机性能极限?
目录 1、CPU 负载 2、内存使用情况 3、实时性能 4、外设带宽 5、功耗与温度 在嵌入式系统设计中,当系统变得复杂、功能增加时,单片机可能会逐渐逼近其性能极限。及时识别这些极限点对于保证产品质量、稳定性和用户体验至关重要。 当你的嵌入式系统…...

AI在多Agent协同领域的核心概念、技术方法、应用场景及挑战 的详细解析
以下是 AI在多Agent协同领域的核心概念、技术方法、应用场景及挑战 的详细解析: 1. 多Agent协同的定义与核心目标 多Agent系统(MAS, Multi-Agent System): 由多个独立或协作的智能体(Agent)组成ÿ…...
1.凸包、极点、极边基础概念
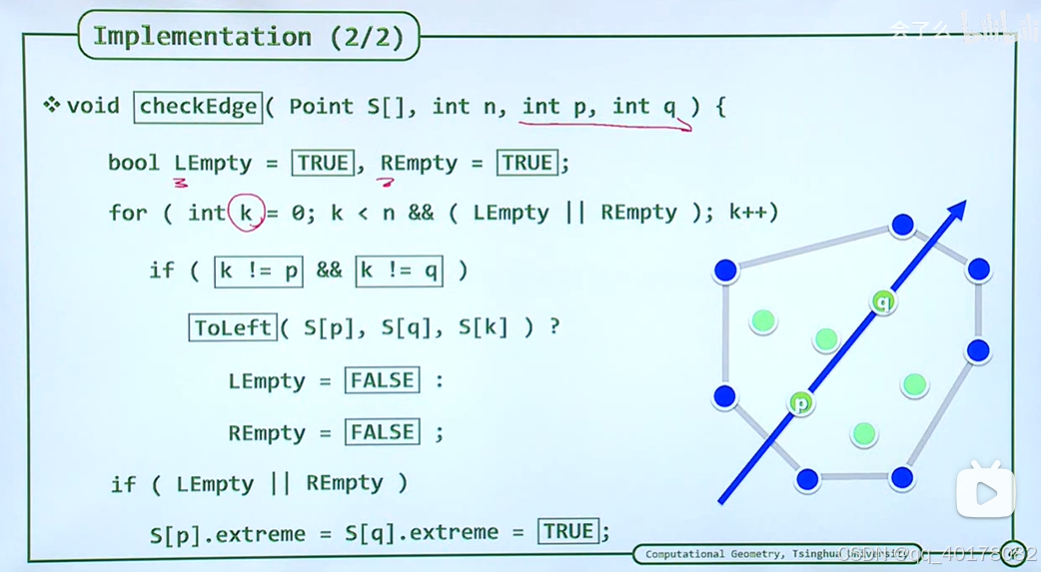
目录 1.凸包 2.调色问题 3.极性(Extrem) 4.凸组合(Convex Combination) 5.问题转化(Strategy)编辑 6.In-Triangle test 7.To-Left-test 8.极边(Extream Edges) 1.凸包 凸包就是上面蓝色皮筋围出来的范围 这些钉子可以转换到坐标轴中࿰…...

OSCP - Proving Grounds - DriftingBlues6
主要知识点 路径爆破dirtycow内核漏洞提权 具体步骤 总体来讲,这台靶机还是比较直接的,没有那么多的陷阱,非常适合用来学习 依旧是nmap开始,只开放了80端口 Nmap scan report for 192.168.192.219 Host is up (0.42s latency). Not shown: 65534 cl…...

深度理解指针之例题
文章目录 前言题目分析与讲解涉及知识点 前言 对指针有一定了解后,讲一下一道初学者的易错题 题目分析与讲解 先定义一个数组跟一个指针变量 然后把数组名赋值给指针变量————也就是把首地址传到pulPtr中 重点是分析这一句: *(pulPtr…...

java 设计模式之策略模式
简介 策略模式:策略模式可以定制目标对象的行为,它尅通过传入不同的策略实现,来配置目标对象的行为。使用策略模式,就是为了定制目标对象在某个关键点的行为。 策略模式中的角色: 上下文类:持有一个策略…...
LeetCode算法题(Go语言实现)_51
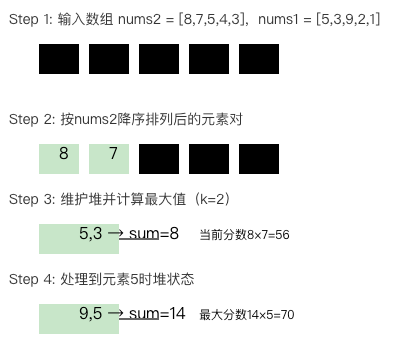
题目 给你两个下标从 0 开始的整数数组 nums1 和 nums2 ,两者长度都是 n ,再给你一个正整数 k 。你必须从 nums1 中选一个长度为 k 的 子序列 对应的下标。 对于选择的下标 i0 ,i1 ,…, ik - 1 ,你的 分数 …...

条件变量condition_variable
1.条件变量用来控制线程同步和协调。 2.调用wait方法,如果条件满足就不挂起,如果条件不满足就挂起线程并释放锁。 3.等到通知后,挂起线程先 竞争锁,然后 判断条件,如果满足条件就往下走,如果不满足就再次挂起并释放锁…...
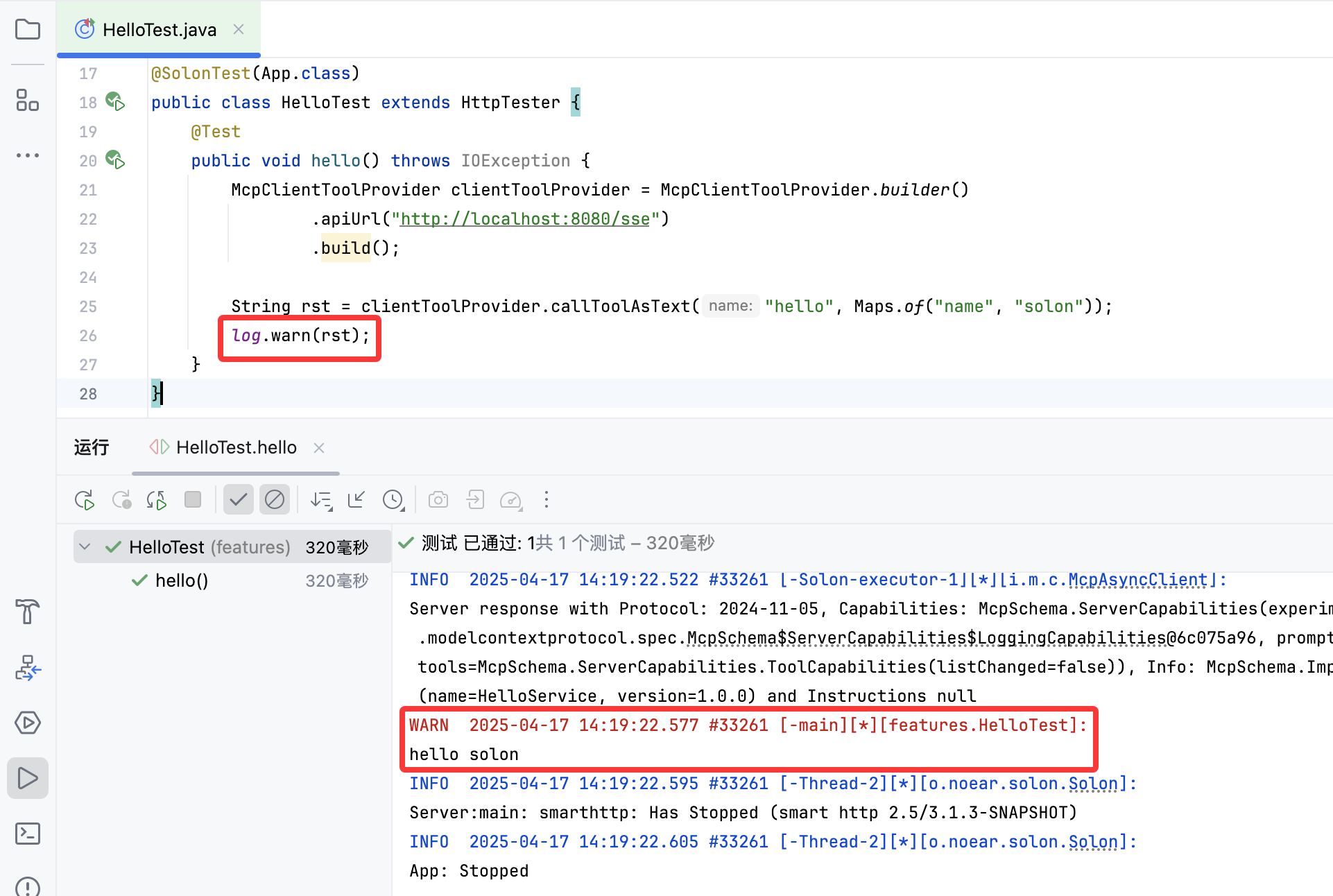
Solon AI MCP Server 入门:Helloworld (支持 java8 到 java24。国产解决方案)
目前网上能看到的 MCP Server 基本上都是基于 Python 或者 nodejs ,虽然也有 Java 版本的 MCP SDK,但是鲜有基于 Java 开发的。 作为Java 开发中的国产顶级框架 Solon 已经基于 MCP SDK 在进行 Solon AI MCP 框架开发了,本文将使用 Solon AI …...
——部署项目到仓库)
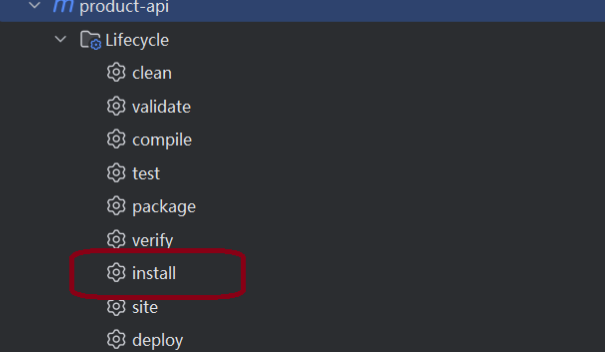
Maven工具学习使用(十一)——部署项目到仓库
1、使用Maven默认方式 Maven 部署项目时默认使用的上传文件方式是通过 HTTP/HTTPS 协议。要在 Maven 项目中配置部署,您需要在项目的 pom.xml 文件中添加 部分。这个部分定义了如何部署项目的构件(如 JAR 文件)到仓库。。这个部分定义了如何…...

公司内部自建知识共享的方式分类、详细步骤及表格总结,分为开源(对外公开)和闭源(仅限内部),以及公共(全员可访问)和内部(特定团队/项目组)四个维度
以下是公司内部自建知识共享的方式分类、详细步骤及表格总结,分为开源(对外公开)和闭源(仅限内部),以及公共(全员可访问)和内部(特定团队/项目组)四个维度&am…...
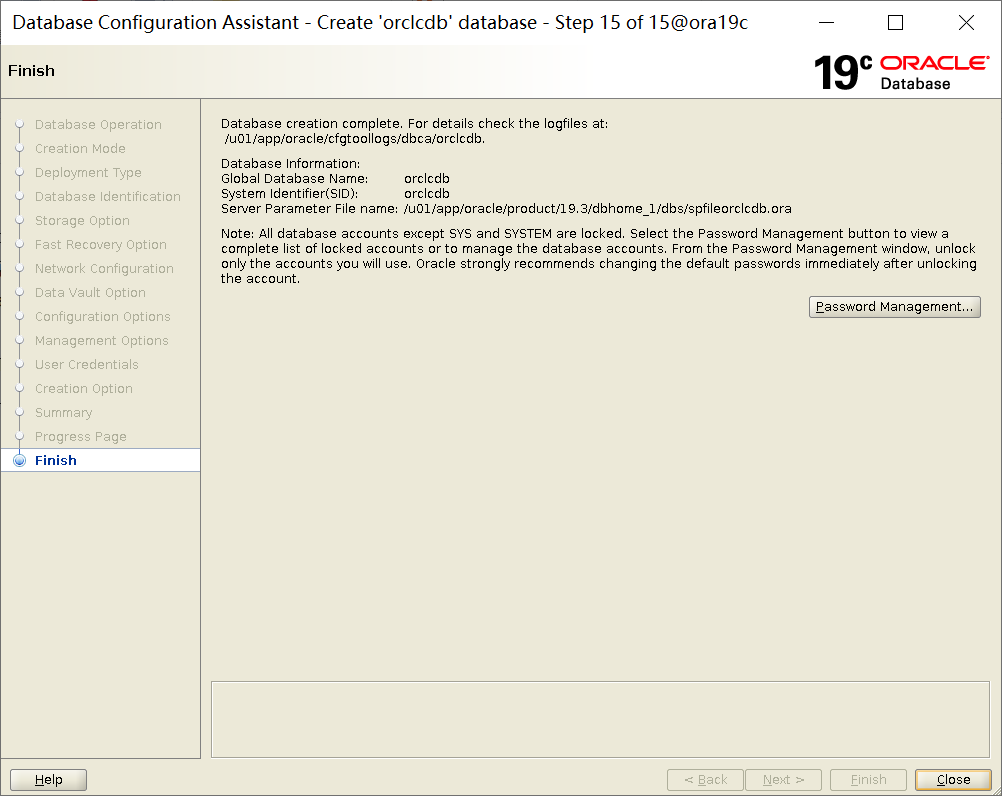
Oracle 19c部署之初始化实例(三)
上一篇文章中,我们已经完成了数据库软件安装,接下来我们需要进行实例初始化工作。 一、初始化实例的两种方式 1.1 图形化初始化实例 描述:图形化初始化实例是通过Oracle的Database Configuration Assistant (DBCA)工具完成的。用户通过一系…...

医疗设备预测性维护合规架构:从法规遵循到技术实现的深度解析
在医疗行业数字化转型加速推进的当下,医疗设备预测性维护已成为提升设备可用性、保障医疗安全的核心技术。然而,该技术的有效落地必须建立在严格的合规框架之上。医疗设备直接关乎患者生命健康,其维护过程涉及医疗法规、数据安全、质量管控等…...
Openfeign的最佳实践
文章目录 问题引入一、继承的方式1. 建立独立的Moudle服务2. 服务调用方继承jar包中的接口3. 直接注入继承后的接口进行使用 二、抽取的方式1. 建立独立的Moudle服务2.服务调用方依赖注入 问题引入 openfeign接口的实现和服务提供方的controller非常相似,例如&…...
)
Python中如何加密/解密敏感信息(如用户密码、token)
敏感信息,如用户密码、API密钥、访问令牌(token)、信用卡号以及其他个人身份信息(PII),构成了现代应用程序和系统中最为关键的部分。这些信息一旦被未经授权的第三方获取,可能引发灾难性的后果,从个人隐私泄露到企业经济损失,甚至是大规模的社会安全问题。保护这些敏感…...

【Java面试系列】Spring Cloud微服务架构中的分布式事务解决方案与Seata框架实现原理详解 - 3-5年Java开发必备知识
【Java面试系列】Spring Cloud微服务架构中的分布式事务解决方案与Seata框架实现原理详解 - 3-5年Java开发必备知识 引言 在微服务架构中,分布式事务是一个不可避免的挑战。随着业务复杂度的提升,如何保证跨服务的数据一致性成为了面试中的高频问题。本…...
)
从万维网到人工智能基石:大数据技术三十年演进史(1991-2025)
一、万维网的创世纪(1991) 1.1 信息共享的革命性突破 1991年8月6日,蒂姆伯纳斯-李在欧洲核子研究中心(CERN)发布首个万维网(World Wide Web)网站,构建了信息互联的三项核心技术&…...
Buildroot编译过程中下载源码失败
RK3588编译一下recovery,需要把buildroot源码编译一遍。遇到好几个文件都下载失败,如下所示 pm-utils 1.4.1这个包下载失败,下载地址http://pm-utils.freedesktop.org/releases 解决办法,换个网络用windows浏览器下载后ÿ…...

【Rust基础】crossbeam带来的阻塞问题
背景 最近正在做AI知识库的相关内容,web框架使用Rocket,需要使用SSE处理模型的流式输出,而Rocket的SSE功能比较单一,没有进行全局状态管理,因此需要手动处理SSE连接,而对于web环境下,必然会涉及…...
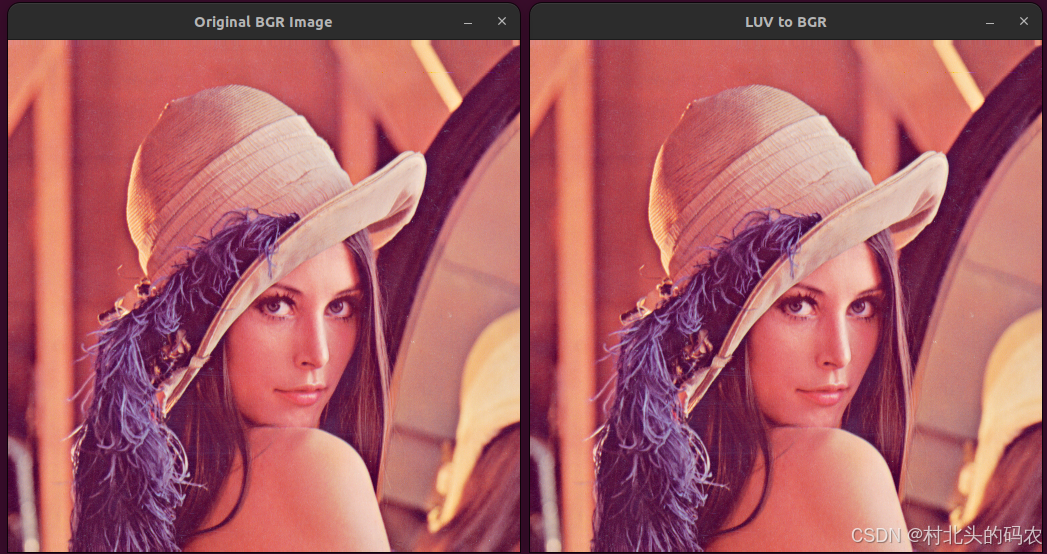
OpenCV 图形API(43)颜色空间转换-----将 BGR 图像转换为 LUV 色彩空间函数BGR2LUV()
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 将图像从BGR色彩空间转换为LUV色彩空间。 该函数将输入图像从BGR色彩空间转换为LUV。B、G和R通道值的传统范围是0到255。 输出图像必须是8位无符…...
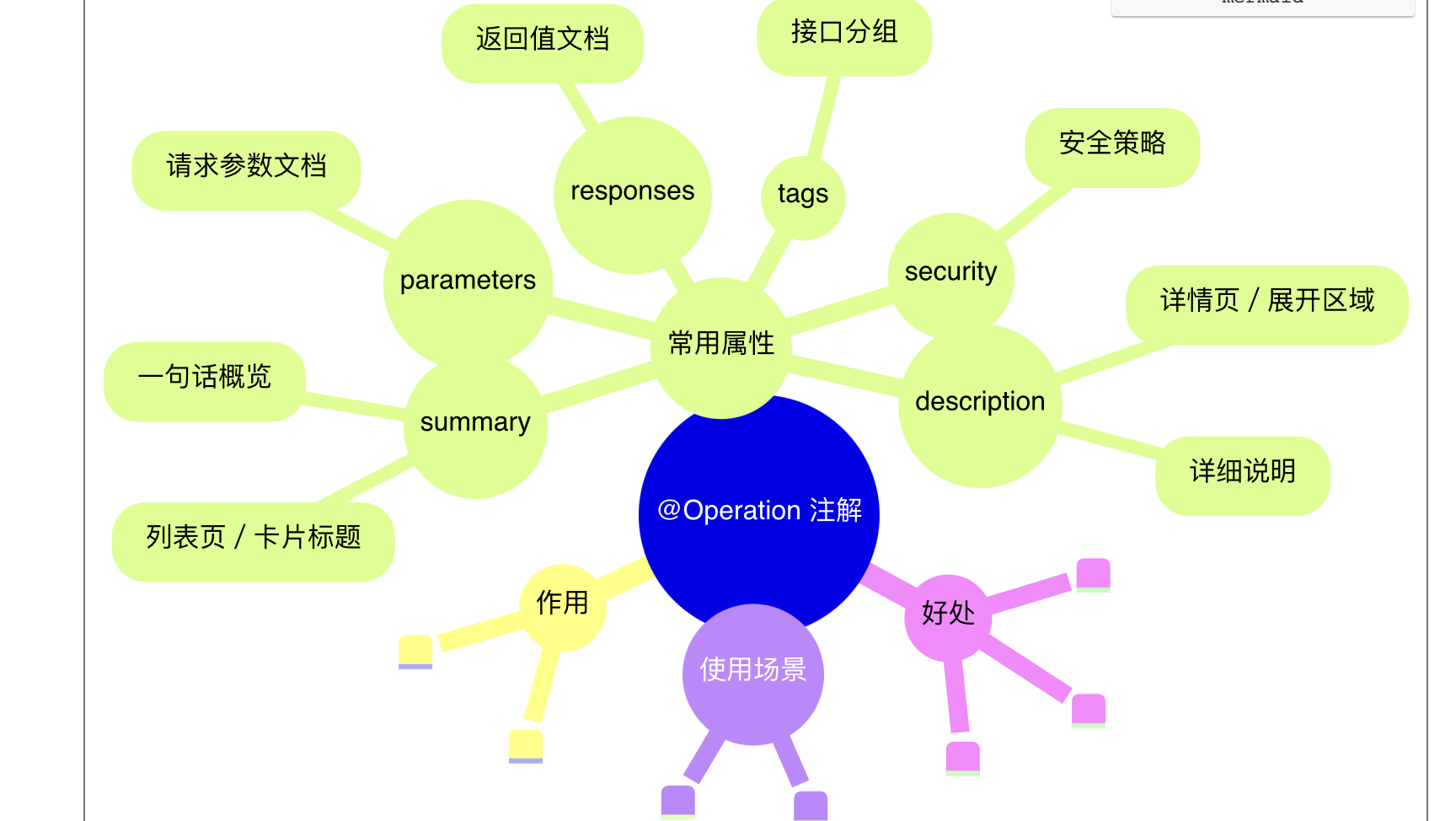
自问自答模式(Operation是什么)
自问自答 问:Operation 注解来自哪里? 答:Operation 是 OpenAPI(Swagger)规范中,来自 io.swagger.v3.oas.annotations 包的一个注解,用于给 REST 接口增加文档元数据。 问:summary …...

996引擎-实战笔记:Lua 的 NPC 面板获取 Input 内容
996引擎-实战笔记:Lua 的 NPC 面板获取 Input 内容 获取 Input 内容测试NPC参考资料获取 Input 内容 测试NPC -- NPC入口函数 function main(player)local msg = [[<Img|id=9527|x=0|y=0|width=300|height=150|img=public/bg_npc_01.png|bg=1|move=1|reset=1|show=0|layer…...
少数服从多数悖论、黑白颠倒与众人孤立现象之如何应对(一)
观己之前,也可先观众生 如果当时没有袖手旁观,或许唇不亡齿也不会寒 ■如何轻松/更好应对个别被众人孤立(他人、辨别、自己) ●他人被孤立 不参与 有余力,助弱者 被孤立者本身有问题 •不参与:不会辨…...

leetcode0058. 最后一个单词的长度-easy
1 题目:最后一个单词的长度 官方标定难度:易 给你一个字符串 s,由若干单词组成,单词前后用一些空格字符隔开。返回字符串中 最后一个 单词的长度。 单词 是指仅由字母组成、不包含任何空格字符的最大子字符串。 示例 1&#x…...
新一代电子海图S-100标准
随着航海技术的不断发展,国际海事组织(IMO)和国际航道测量组织(IHO)不断推动电子海图标准的更新,以提高航行安全和效率。S-100标准作为新一代电子海图标准,为电子海图显示和信息系统(…...
)
Python内置函数---all()
Python内置函数 all() 用于判断可迭代对象中的所有元素是否都为真值(Truthy),是逻辑判断的重要工具。 1. 基本语法 all(iterable) 参数: iterable 必须为可迭代对象(如列表、元组、集合、字典的值等)。…...
力扣热题100——普通数组(不普通)
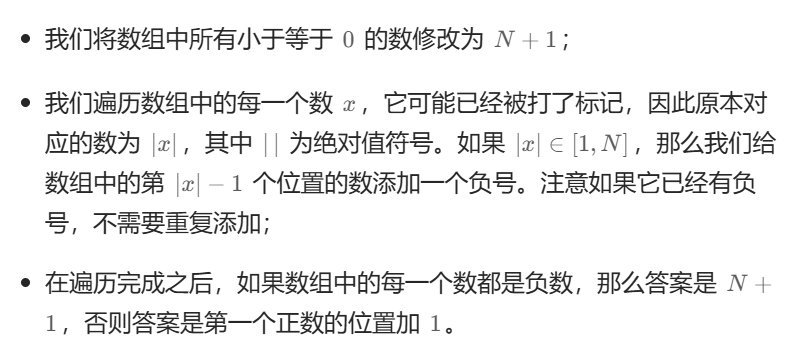
普通数组但一点不普通! 最大子数组和合并区间轮转数组除自身以外数组的乘积缺失的第一个正数 最大子数组和 这道题是非常经典的适用动态规划解决题目,但同时这里给出两种解法 动态规划、分治法 那么动态规划方法大家可以在我的另外一篇博客总结中看到&am…...
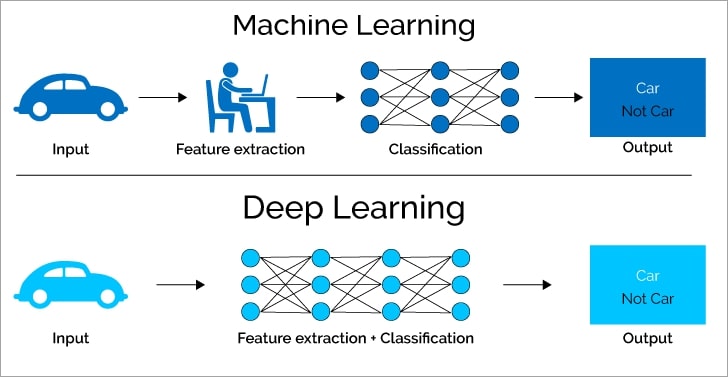
深度学习与机器学习的关系解析:从基础到应用
📌 友情提示: 本文内容由银河易创AI(https://ai.eaigx.com)创作平台的gpt-4-turbo模型生成,旨在提供技术参考与灵感启发。文中观点或代码示例需结合实际情况验证,建议读者通过官方文档或实践进一步确认其准…...

【Java学习笔记】标识符和保留字
标识符和保留字 一、标识符概念: 1. Java 对各种变量、方法和类等命名时使用的字符序列称为标识符。 2. 凡是自己可以起名字的地方都可以使用标识符。 例如:int num1 90; 二、标识符命名规则(必须遵守): 1. 由 26 个…...

用Python打造去中心化知识产权保护系统:科技驱动创作者权益新方案
用Python打造去中心化知识产权保护系统:科技驱动创作者权益新方案 近年来,区块链技术和去中心化系统的兴起为知识产权保护提供了新的可能性。在传统模式下,知识产权保护通常依赖于集中化管理机构,这种方式不仅成本高,还可能因不透明导致权益争议。于是,我们萌生了一个设…...