原型模式详解及在自动驾驶场景代码示例(c++代码实现)
模式定义
原型模式(Prototype Pattern)是一种创建型设计模式,通过克隆已有对象来创建新对象,避免重复执行昂贵的初始化操作。该模式特别适用于需要高效创建相似对象的场景,是自动驾驶感知系统中处理大量重复数据结构的理想选择。
自动驾驶感知场景分析
在自动驾驶感知系统中,典型的应用场景包括:
- 障碍物克隆:快速复制已识别的障碍物模板
- 点云分割:高效生成相似的点云聚类实例
- 传感器配置:复用基础配置模板创建新传感器实例
本文将重点实现障碍物对象的原型管理模块。
C++实现代码(含详细注释)
#include <iostream>
#include <unordered_map>
#include <memory>
#include <cmath>// ---------------------------- 抽象原型接口 ----------------------------
class ObstaclePrototype {
public:virtual ~ObstaclePrototype() = default;// 克隆接口(关键方法)virtual std::unique_ptr<ObstaclePrototype> clone() const = 0;// 更新状态(示例方法)virtual void updatePosition(float delta_x, float delta_y) = 0;// 显示信息(示例方法)virtual void display() const = 0;
};// ---------------------------- 具体原型实现 ----------------------------
// 车辆障碍物原型
class Vehicle : public ObstaclePrototype {
private:float pos_x; // X坐标float pos_y; // Y坐标float length; // 车长float width; // 车宽std::string type; // 车辆类型public:Vehicle(float x, float y, float l, float w, std::string t): pos_x(x), pos_y(y), length(l), width(w), type(std::move(t)) {}// 实现克隆方法(关键实现)std::unique_ptr<ObstaclePrototype> clone() const override {std::cout << "克隆车辆对象 [" << type << "]" << std::endl;return std::make_unique<Vehicle>(*this); // 调用拷贝构造函数}void updatePosition(float delta_x, float delta_y) override {pos_x += delta_x;pos_y += delta_y;}void display() const override {std::cout << "车辆类型: " << type << " 位置(" << pos_x << ", " << pos_y<< ") 尺寸: " << length << "x" << width << std::endl;}// 特有方法:计算占据面积float calculateArea() const {return length * width;}
};// 行人原型
class Pedestrian : public ObstaclePrototype {
private:float pos_x;float pos_y;float speed;int id;public:Pedestrian(float x, float y, float s, int i): pos_x(x), pos_y(y), speed(s), id(i) {}std::unique_ptr<ObstaclePrototype> clone() const override {std::cout << "克隆行人对象 #" << id << std::endl;return std::make_unique<Pedestrian>(*this);}void updatePosition(float delta_x, float delta_y) override {pos_x += delta_x * speed;pos_y += delta_y * speed;}void display() const override {std::cout << "行人 #" << id << " 位置(" << pos_x << ", " << pos_y<< ") 速度: " << speed << "m/s" << std::endl;}// 特有方法:预测运动轨迹void predictTrajectory(float time) const {std::cout << "预测 " << time << "秒后位置: (" << pos_x + speed * time << ", "<< pos_y + speed * time << ")" << std::endl;}
};// ---------------------------- 原型管理器 ----------------------------
class PrototypeManager {
private:std::unordered_map<std::string, std::unique_ptr<ObstaclePrototype>> prototypes;public:// 注册原型void registerPrototype(const std::string& key, std::unique_ptr<ObstaclePrototype> proto) {prototypes[key] = std::move(proto);std::cout << "已注册原型: " << key << std::endl;}// 创建克隆std::unique_ptr<ObstaclePrototype> createClone(const std::string& key) {if (prototypes.find(key) != prototypes.end()) {return prototypes[key]->clone();}std::cerr << "错误: 未找到原型 " << key << std::endl;return nullptr;}// 显示已注册原型void listPrototypes() const {std::cout << "\n=== 已注册原型列表 ===" << std::endl;for (const auto& pair : prototypes) {std::cout << "- " << pair.first << std::endl;}}
};// ---------------------------- 场景演示 ----------------------------
int main() {PrototypeManager manager;// 初始化并注册原型manager.registerPrototype("sedan", std::make_unique<Vehicle>(0, 0, 4.8f, 1.8f, "轿车"));manager.registerPrototype("truck", std::make_unique<Vehicle>(0, 0, 8.5f, 2.5f, "卡车"));manager.registerPrototype("adult", std::make_unique<Pedestrian>(0, 0, 1.2f, 1001));// 显示可用原型manager.listPrototypes();// 动态创建障碍物实例auto obstacle1 = manager.createClone("sedan");auto obstacle2 = manager.createClone("adult");auto obstacle3 = manager.createClone("truck");// 使用克隆对象if (obstacle1) {obstacle1->updatePosition(10.5f, 3.2f);obstacle1->display();// 类型特定操作(需要向下转型)if (auto vehicle = dynamic_cast<Vehicle*>(obstacle1.get())) {std::cout << "车辆面积: " << vehicle->calculateArea() << "m²" << std::endl;}}if (obstacle2) {obstacle2->updatePosition(2.0f, 1.5f);obstacle2->display();if (auto ped = dynamic_cast<Pedestrian*>(obstacle2.get())) {ped->predictTrajectory(5.0f);}}return 0;
}
代码解析
1. 原型接口设计
class ObstaclePrototype {
public:virtual std::unique_ptr<ObstaclePrototype> clone() const = 0;// ...
};
- 核心克隆方法:强制子类实现对象复制功能
- 多态支持:统一接口处理各种障碍物类型
2. 具体原型实现
class Vehicle : public ObstaclePrototype {std::unique_ptr<ObstaclePrototype> clone() const override {return std::make_unique<Vehicle>(*this); // 调用拷贝构造函数}// ...
};
- 深拷贝实现:利用C++的拷贝构造函数确保对象独立性
- 特有方法保留:各子类可保持专属行为特征
3. 原型管理器
class PrototypeManager {std::unordered_map<std::string, std::unique_ptr<ObstaclePrototype>> prototypes;// ...
};
- 中央注册表:统一管理所有可用原型
- 动态扩展:运行时添加/移除原型
运行结果
已注册原型: sedan
已注册原型: truck
已注册原型: adult=== 已注册原型列表 ===
- sedan
- truck
- adult克隆车辆对象 [轿车]
克隆行人对象 #1001
克隆车辆对象 [卡车]
车辆类型: 轿车 位置(10.5, 3.2) 尺寸: 4.8x1.8
车辆面积: 8.64m²
行人 #1001 位置(2.4, 1.8) 速度: 1.2m/s
预测 5秒后位置: (8.4, 7.8)
模式优势分析
在自动驾驶中的价值
-
性能优化
- 避免重复初始化复杂对象(如3D点云数据)
- 快速复制预处理后的标准障碍物模板
-
动态配置
- 运行时添加新障碍物类型(如特殊车辆)
- 支持OTA更新障碍物识别参数
-
状态保存
- 克隆历史帧数据用于轨迹预测
- 创建障碍物快照用于安全校验
扩展改进建议
1. 差异克隆控制
// 扩展克隆接口
enum CloneType { FULL, LIGHTWEIGHT };
virtual std::unique_ptr<ObstaclePrototype> clone(CloneType type) const;
2. 原型版本管理
class VersionedPrototype : public ObstaclePrototype {int version = 1;void updateParameters() { /*...*/ version++; }
};
3. 原型池优化
class PrototypePool {std::vector<std::unique_ptr<ObstaclePrototype>> pool;// 实现对象复用逻辑
};
原型模式总结
核心价值:
- 通过对象克隆替代昂贵的新建操作
- 保持新对象与原型的一致性
- 支持动态运行时对象类型扩展
适用场景:
- 需要高效创建大量相似障碍物实例的感知系统
- 需要保存和恢复传感器数据快照的场景
- 支持动态加载新障碍物类型的自动驾驶平台
本实现展示了原型模式在自动驾驶感知系统中的典型应用,通过标准化的克隆接口和统一的原型管理,显著提升了系统创建障碍物对象的效率和灵活性。
相关文章:
)
原型模式详解及在自动驾驶场景代码示例(c++代码实现)
模式定义 原型模式(Prototype Pattern)是一种创建型设计模式,通过克隆已有对象来创建新对象,避免重复执行昂贵的初始化操作。该模式特别适用于需要高效创建相似对象的场景,是自动驾驶感知系统中处理大量重复数据结构的…...
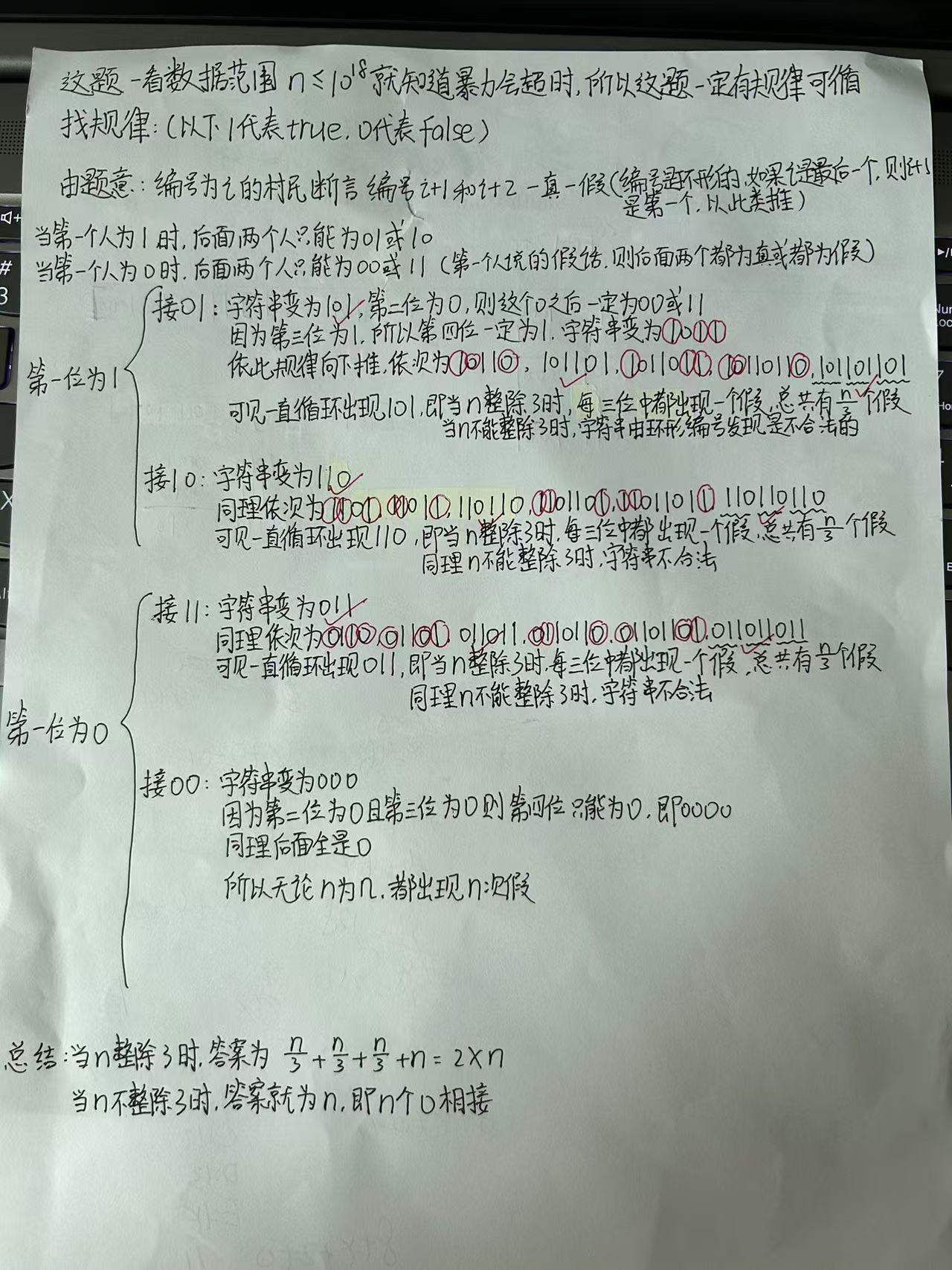
蓝桥杯常考的找规律题
目录 灵感来源: B站视频链接: 找规律题具有什么样的特点: 报数游戏(Java组): 题目描述: 题目链接: 思路详解: 代码详解: 阶乘求和(Java组…...
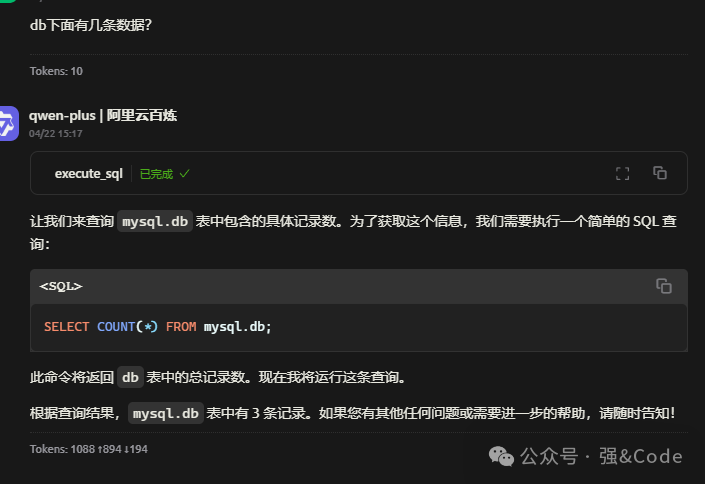
MySQL_MCP_Server_pro接入cherry_studio实现大模型操作数据库
大模型直接与数据库交互,实现基本增删改查操作。首先贴下代码地址: https://github.com/wenb1n-dev/mysql_mcp_server_pro 安装环境:win10 1、下载代码 git clone https://github.com/wenb1n-dev/mysql_mcp_server_pro 2、使用conda创建…...

Element UI、Element Plus 里的表单验证的required必填的属性不能动态响应?
一 问题背景 想要实现: 新增/修改对话框中(同一个),修改时“备注”字段非必填,新增时"备注"字段必填 结果发现直接写不生效-初始化一次性 edit: [{ required: true, message: "请输入备注", trigger: "blur" }…...
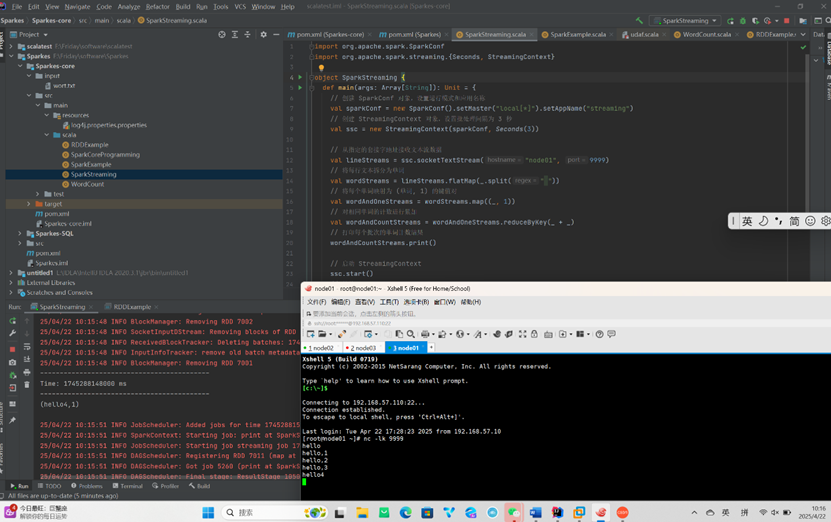
Spark-Streaming
WordCount案例 添加依赖 <?xml version"1.0" encoding"UTF-8"?> <project xmlns"http://maven.apache.org/POM/4.0.0" xmlns:xsi"http://www.w3.org/2001/XMLSchema-instance" xsi:schemaLocation"…...
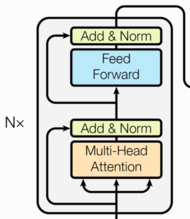
transformer 子层连接结构
子层连接结构 目标 了解什么是子层连接结构掌握子层连接结构的实现过程 什么是子层连接结构? 输入到每个子层以及规范化层的过程中, 使用了残差连接(跳跃连接, 从Add&Norm -> Add&Norm), 因此我们把这一部分结构整体叫做子层连接(代表子层及其链接结构), 在每个…...
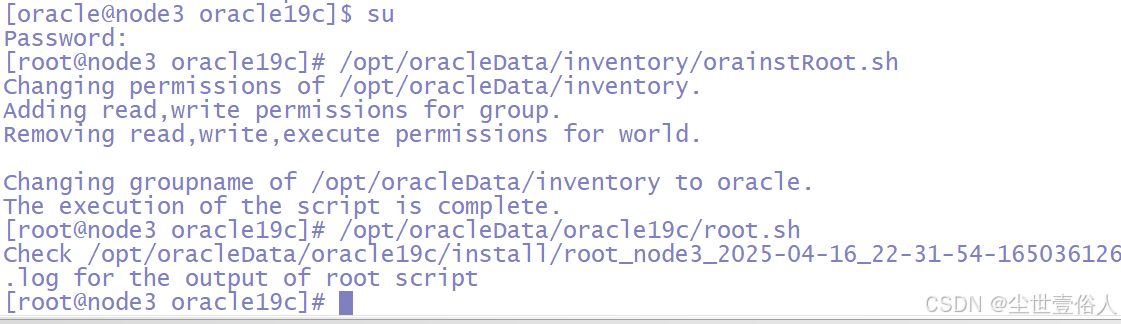
linux oracle 19c 静默安装
oracle数据库有个比较很抓瞎的事情,不同的版本搭建的大致流程是一样的,但是在实操细节上会有不同,比如操作的脚本位置和配置项等等,这些会变,所以需要时常积累不同版本的文档 这里有一点要说明,之所以使用…...
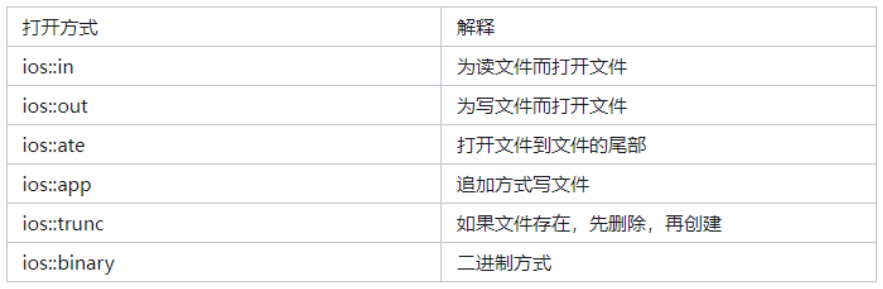
C++ 的 输入输出流(I/O Streams)
什么是输入输出流 C 的输入输出操作是通过 流(stream) 机制实现的。 流——就是数据的流动通道,比如: 输入流:从设备(如键盘、文件)读取数据 → 程序 输出流:程序将数据写入设备&…...

mybatis-plus开发orm
1、mybatis 使用mybatis-generator自动生成代码 这个也是有系统在使用 2、mybatis-plus开发orm--有的系统在使用 MybatisPlus超详细讲解_mybatis-plus-CSDN博客...

使用Python+OpenCV将多级嵌套文件夹下的视频文件抽帧为JPG图片
使用PythonOpenCV将多级嵌套文件夹下的视频文件抽帧为JPG图片 import os import cv2 import time# 存放视频文件的多层嵌套文件夹路径 videoPath D:\\videos\\ # 保存抽帧的图片的文件夹路径 savePath D:\\images\\if not os.path.exists(savePath):os.mkdir(savePath) vide…...
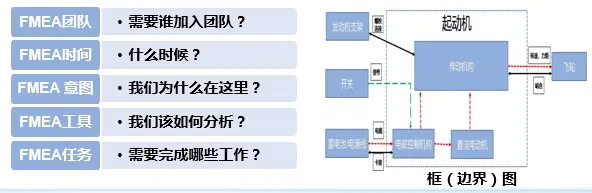
电子电器架构 --- DFMEA设计失效模式和后果分析
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 周末洗了一个澡,换了一身衣服,出了门却不知道去哪儿,不知道去找谁,漫无目的走着,大概这就是成年人最深的孤独吧! 旧人不知我近况,新人不知我过…...

C#抽象类和虚方法的作用是什么?
抽象类 (abstract class): 不能直接实例化,只能被继承。 用来定义一套基础框架和规范,强制子类必须实现某些方法(抽象方法)。 可用来封装一些共通的逻辑,减少代码重复。 虚方法 (virtual): …...

C#获取当前方法的命名空间、类名称、方法名称以及方法的参数信息
C#获取当前方法的命名空间、类名称、方法名称以及方法的参数信息 输出示例模块示例 输出示例 获取信息:WindowsFormsApp1.Form1.button1_Click(System.Object sender,System.EventArgs e) 引发的异常:“System.IndexOutOfRangeException”(位于 WindowsFormsApp1.ex…...
Apache SeaTunnel:新一代开源、高性能数据集成工具
Apache SeaTunnel 是一款开源、分布式、高性能的数据集成工具,可以通过配置快速搭建数据管道,支持实时海量数据同步。 Apache SeaTunnel 专注于数据集成和数据同步,主要旨在解决数据集成领域的常见问题: 数据源多样性:…...
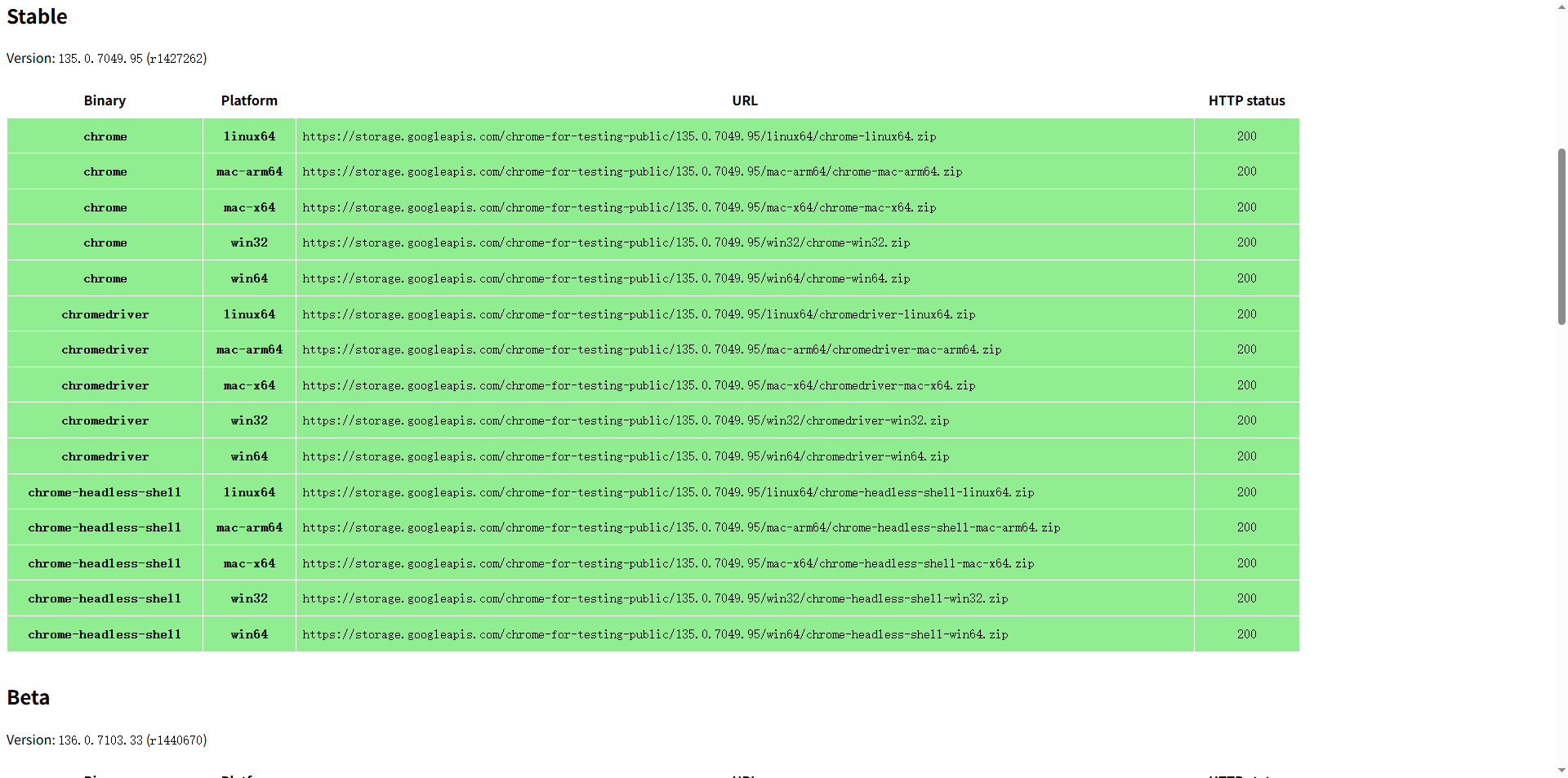
python+selenium+pytest自动化测试chrome driver版本下载
chrome浏览器chromedriver版本下载地址 https://googlechromelabs.github.io/chrome-for-testing/#stable...
3.1 WPF使用MaterialDesign的介绍1
MaterialDesignInXAML Toolkit 是一个流行的开源 C# WPF 控件库,它实现了 Google 的 Material Design 规范,让开发者可以轻松创建现代化的 WPF 应用程序界面 Material Design 是一个流行的设计语言,由 Google 开发,旨在帮助开发者构建美观且一致的 UI 界面。对于使用 C# 的…...

从 0 到 1 打通 AI 工作流:Dify+Zapier 实现工具自动化调用实战
一、引言:当 AI 遇到工具孤岛 在企业数字化转型的浪潮中,AI 工具的应用早已从单一的对话交互进阶到复杂的业务流程自动化。但开发者常常面临这样的困境:本地开发的 MCP 工具(如 ERP 数据清洗脚本、CRM 工单系统 API)如…...

【算法笔记】如何优雅的进行字符串操作
最近的CCCC天梯赛又出了非常恶心的字符串题~ 在编程竞赛(特别是CCCC天梯赛)中,字符串操作类题目往往看似简单却暗藏陷阱。本文将以Python、Java、C 三剑客为例,总结高频字符串操作的优雅实现方案,助你快速攻克字符串类…...

docker转移镜像
1、场景 有网络环境向无网络环境转移镜像。无法拉取的镜像(外网无法访问)下载镜像转移到服务器上。 2、docker转移 2.1 镜像服务器 保存镜像 列出项目使用的所有镜像 docker images 保存所有镜像为 tar 文件 保存docker镜像 docker save -o my_…...
:让编译器读懂引用的“有效期”)
【Rust 精进之路之第12篇-生命周期·入门】为何需要与显式标注 (`‘a`):让编译器读懂引用的“有效期”
系列: Rust 精进之路:构建可靠、高效软件的底层逻辑 作者: 码觉客 发布日期: 2025-04-20 引言:悬垂引用的“幽灵”与编译器的“侦探” 在前面的章节中,我们深入学习了 Rust 的所有权系统,以及如何通过引用 (& 和 &mut) 进行借用,从而在不转移所有权的情况下安…...

Vue.js 之 `v-for` 命令详解
Vue.js 之 v-for 命令详解 在 Vue.js 中,v-for 是一个非常强大的指令,用于遍历数组或对象中的数据,并渲染相应的 DOM 元素。无论是在列表展示、表单生成还是动态组件加载中,v-for 都发挥着重要作用。本文将详细介绍 v-for 的用法…...

Spring Boot中`logging.config`配置项的详解及使用说明
以下是Spring Boot中logging.config配置项的详解及使用说明: 1. logging.config 作用 功能:指定自定义日志配置文件的路径,覆盖Spring Boot默认的日志配置。适用场景:当需要深度定制日志行为(如输出格式、文件路径、…...
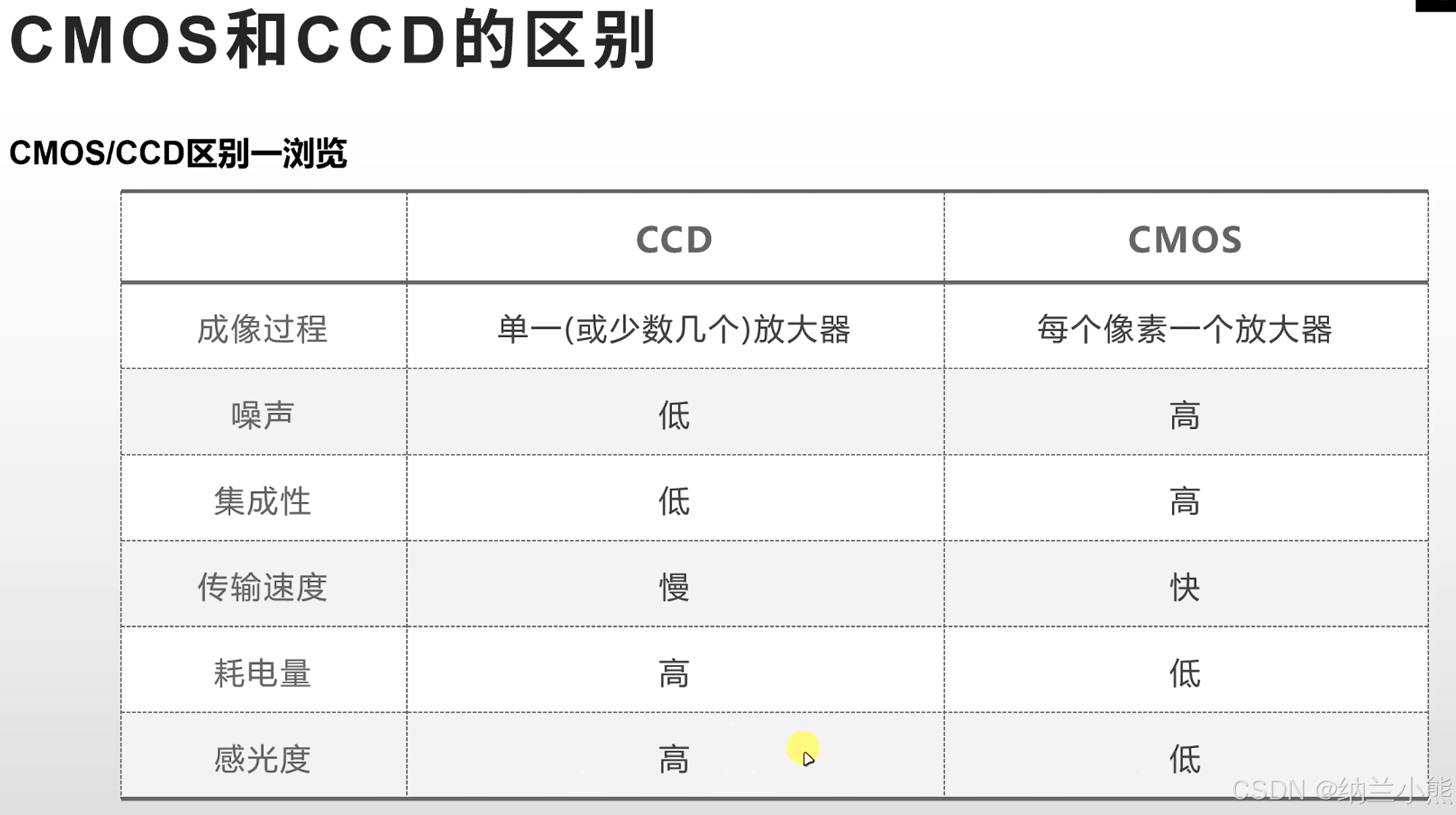
相机模型--CMOS和CCD的区别
1--CMOS和CCD的工作原理 CCD(Charge Coupled Device,电荷耦合器件): 1. 图像通过光电效应在感光单元中转化为电荷; 2. 每个像素上的电荷被依次“耦合”并传输到芯片的角落,通过一个或几个模拟输出放大器输…...

el-date-picker时间范围 赋值报错问题
问题: 点击时间范围组件右边清除图标,点击近6小时会把设置好的时间赋值给时间范围组件 但是出现报错 原因: 尝试对null值进行属性设置操作:修改一个数组的元素,但此时这个数组是null,而不是预期的数组类型…...
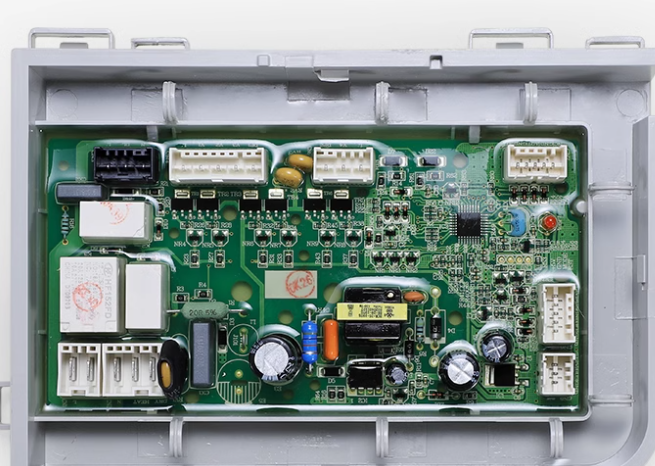
为啥低速MCU单板辐射测试会有200M-1Ghz的辐射信号
低速MCU(如8位或16位单片机)单板在辐射测试中出现 200MHz~1GHz的高频辐射信号,看似不合理,但实际上是由多种因素共同导致的。以下是详细原因分析及解决方案: 1.根本原因分析: (1) 时钟谐波与开关噪声 低速MCU的时钟谐…...
【音视频】FFmpeg解封装
解封装 复用器,比如MP4/FLV 解复用器,MP4/FLV 封装格式相关函数 avformat_alloc_context(); 负责申请一个AVFormatContext结构的内存,并进行简单初始化avformat_free_context(); 释放该结构里的所有东西以及该结构本身avformat_close_input();关闭解复…...

使用VHDL语言实现TXT文件的读写操作
使用FPGA进行图像处理时,通常需要将TXT文件中的图像数据读出到TestBench中,并将仿真的结果写入到TXT文件中,用于确认图像处理的结果是否正确。 VHDL中TXT文件的读写操作如下所示, --------------------------------------------…...
OpenLDAP 管理 ELK 用户
文章目录 一、新建 ELK 相关用户组二、配置 Elasticsearch2.1 修改 elasticsearch.yml 配置2.2 使用 API 接口建立角色和用户映射 三、Kibana 验证用户登录 一、新建 ELK 相关用户组 由于后续要将 LDAP 的用户与 ELK 的角色进行映射,所以需先创建几个以 ELK 的角色…...
第十七届“华中杯”大学生数学建模挑战赛题目A题 晶硅片产销策略优化 完整成品 代码 模型 思路 分享
近年来,高纯度晶硅片需求的增长引发了更激烈的市场竞争。晶硅片企业需要在成本控制、利润优化和供需管理之间取得平衡,以提高经营效率和市场竞争力。晶硅片的生产是一个高能耗、高成本的过程,企业效益会受到原材料价格波动、市场需求变化以及…...
)
iOS 中的虚拟内存 (理解为什么需要虚拟内存)
什么叫“虚拟地址空间”? 一句话:它是 CPU 看得见、App 以为自己独享,但实际上会被内核和硬件(MMU)动态翻译到真实 物理内存 的一整块“虚拟地图”。 1. 背景:为什么要“虚拟”? 需求虚拟地址空…...