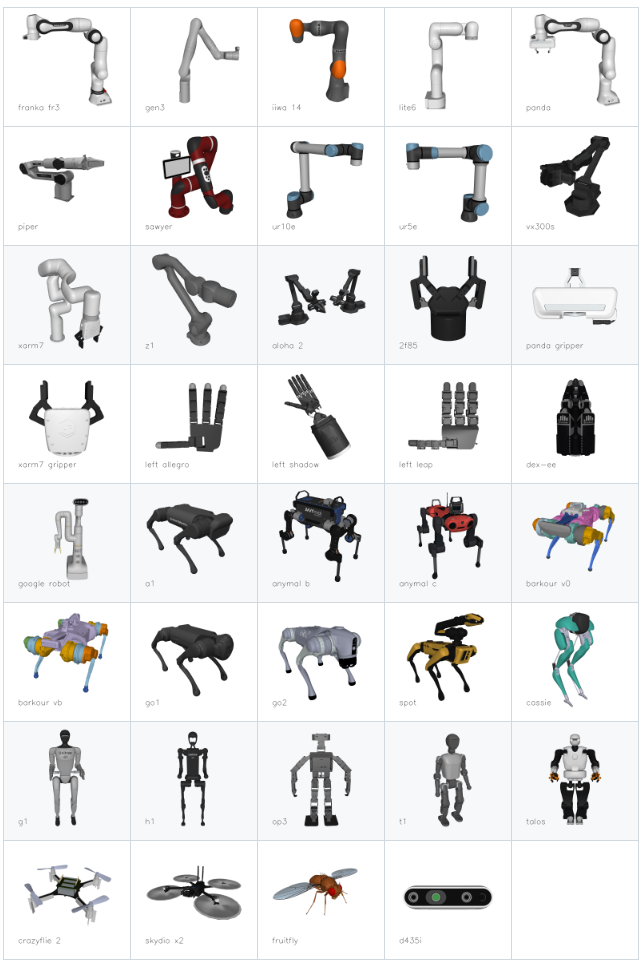
Mujoco robosuite 机器人模型
import ctypes
import os# 获取当前脚本所在的目录
script_dir = os.path.dirname(os.path.abspath(__file__))# 构建库文件的相对路径
lib_relative_path = os.path.join('dynamic_models', 'UR5e', 'Jb.so')# 拼接成完整的路径
lib_path = os.path.join(script_dir, lib_relative_path)try:fun_grav = ctypes.CDLL(lib_path)print("库文件加载成功!")
except OSError as e:print(f"加载库文件时出错: {e}")<mujoco model="ur5"><compiler angle="radian" meshdir="ur5/collision/" /><size njmax="500" nconmax="100" /><asset><mesh name="base" file="base.stl" /><mesh name="shoulder" file="shoulder.stl" /><mesh name="upperarm" file="upperarm.stl" /><mesh name="forearm" file="forearm.stl" /><mesh name="wrist1" file="wrist1.stl" /><mesh name="wrist2" file="wrist2.stl" /><mesh name="wrist3" file="wrist3.stl" /></asset><worldbody><geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.7 0.7 0.7 1" mesh="base" /><geom type="mesh" rgba="0.7 0.7 0.7 1" mesh="base" /><body name="shoulder_link" pos="0 0 0.089159"><inertial pos="0 0 0" mass="3.7" diaginertia="0.0102675 0.0102675 0.00666" /><joint name="shoulder_pan_joint" pos="0 0 0" axis="0 0 1" limited="true" range="-3.14159 3.14159" /><geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.7 0.7 0.7 1" mesh="shoulder" /><geom type="mesh" rgba="0.7 0.7 0.7 1" mesh="shoulder" /><body name="upper_arm_link" pos="0 0.13585 0" quat="0.707107 0 0.707107 0"><inertial pos="0 0 0.28" mass="8.393" diaginertia="0.226891 0.226891 0.0151074" /><joint name="shoulder_lift_joint" pos="0 0 0" axis="0 1 0" limited="true" range="-3.14159 3.14159" /><geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.7 0.7 0.7 1" mesh="upperarm" /><geom type="mesh" rgba="0.7 0.7 0.7 1" mesh="upperarm" /><body name="forearm_link" pos="0 -0.1197 0.425"><inertial pos="0 0 0.196125" mass="2.275" diaginertia="0.0312168 0.0312168 0.004095" /><joint name="elbow_joint" pos="0 0 0" axis="0 1 0" limited="true" range="-3.14159 3.14159" /><geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.7 0.7 0.7 1" mesh="forearm" /><geom type="mesh" rgba="0.7 0.7 0.7 1" mesh="forearm" /><body name="wrist_1_link" pos="0 0 0.39225" quat="0.707107 0 0.707107 0"><inertial pos="0 0.093 0" mass="1.219" diaginertia="0.0025599 0.0025599 0.0021942" /><joint name="wrist_1_joint" pos="0 0 0" axis="0 1 0" limited="true" range="-3.14159 3.14159" /><geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.7 0.7 0.7 1" mesh="wrist1" /><geom type="mesh" rgba="0.7 0.7 0.7 1" mesh="wrist1" /><body name="wrist_2_link" pos="0 0.093 0"><inertial pos="0 0 0.09465" mass="1.219" diaginertia="0.0025599 0.0025599 0.0021942" /><joint name="wrist_2_joint" pos="0 0 0" axis="0 0 1" limited="true" range="-3.14159 3.14159" /><geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.7 0.7 0.7 1" mesh="wrist2" /><geom type="mesh" rgba="0.7 0.7 0.7 1" mesh="wrist2" /><body name="wrist_3_link" pos="0 0 0.09465"><inertial pos="0 0.06505 0" quat="1.73123e-12 0.707107 -0.707107 1.73123e-12" mass="0.1879" diaginertia="0.000132117 8.46959e-05 8.46959e-05" /><joint name="wrist_3_joint" pos="0 0 0" axis="0 1 0" limited="true" range="-3.14159 3.14159" /><geom type="mesh" contype="0" conaffinity="0" group="1" rgba="0.7 0.7 0.7 1" mesh="wrist3" /><geom type="mesh" rgba="0.7 0.7 0.7 1" mesh="wrist3" /><site name="ee" pos="0 0 0" rgba="1 0 0 1" size="0.01" type="sphere"/></body></body></body></body></body></body></worldbody><actuator><motor name='motor1' ctrllimited="true" ctrlrange="-100 100" joint='shoulder_pan_joint' gear="1"/><motor name='motor2' ctrllimited="true" ctrlrange="-100 100" joint='shoulder_lift_joint' gear="1"/><motor name='motor3' ctrllimited="true" ctrlrange="-100 100" joint='elbow_joint' gear="1"/><motor name='motor4' ctrllimited="true" ctrlrange="-100 100" joint='wrist_1_joint' gear="1"/><motor name='motor5' ctrllimited="true" ctrlrange="-100 100" joint='wrist_2_joint' gear="1"/><motor name='motor6' ctrllimited="true" ctrlrange="-100 100" joint='wrist_3_joint' gear="1"/></actuator>
</mujoco>雅克比
from dm_control.mujoco.wrapper import mjbindings
import numpy as npmjlib = mjbindings.mjlibdef get_site_jac(model, data, site_id):"""Return the Jacobian' translational component of the end-effector ofthe corresponding site id."""jacp = np.zeros((3, model.nv))jacr = np.zeros((3, model.nv))mjlib.mj_jacSite(model, data, jacp, jacr, site_id)jac = np.vstack([jacp, jacr])return jacdef get_fullM(model, data):M = np.zeros((model.nv, model.nv))mjlib.mj_fullM(model, M, data.qM)return M任务空间惯量矩阵
def task_space_inertia_matrix(M, J, threshold=1e-3):"""Generate the task-space inertia matrixParameters----------M: np.arraythe generalized coordinates inertia matrixJ: np.arraythe task space Jacobianthreshold: scalar, optional (Default: 1e-3)singular value threshold, if the detminant of Mx_inv is less thanthis value then Mx is calculated using the pseudo-inverse functionand all singular values < threshold * .1 are set = 0"""# calculate the inertia matrix in task spaceM_inv = np.linalg.inv(M)Mx_inv = np.dot(J, np.dot(M_inv, J.T))if abs(np.linalg.det(Mx_inv)) >= threshold:# do the linalg inverse if matrix is non-singular# because it's faster and more accurateMx = np.linalg.inv(Mx_inv)else:# using the rcond to set singular values < thresh to 0# singular values < (rcond * max(singular_values)) set to 0Mx = np.linalg.pinv(Mx_inv, rcond=threshold * 0.1)return Mx, M_invdef set_state(model, data, qpos, qvel):assert qpos.shape == (model.nq, ) and qvel.shape == (model.nv, )# old_state = data.get_state()# new_state = mujoco.MjSimState(old_state.time, qpos, qvel, old_state.act,# old_state.udd_state)# data.set_state(new_state)# model.forward()data.qpos[:] = qposdata.qvel[:] = qveldef get_contact_force(mj_model, mj_data, body_name):bodyId = mujoco.mj_name2id(mj_model, MJ_BODY_OBJ, body_name)force_com = mj_data.cfrc_ext[bodyId, :]trn_force = force_com.copy()return np.hstack((trn_force[3:], trn_force[:3]))def get_geom_pose(model, geom_name):"""Return the geom pose (relative to parent body).:param mujoco_py.MjModel model::param str geom_name::return: position, quaternion:rtype: tuple(np.array(3), np.array(4))"""geom_id = mujoco.mj_name2id(model, MJ_GEOM_OBJ, geom_name)pos = model.geom_pos[geom_id, :]quat = model.geom_quat[geom_id, :]return pos, quatdef get_geom_size(model, geom_name):"""Return the geom size.:param mujoco_py.MjModel model::param str geom_name::return: (radius, half-length, _) for cylinder geom, and(X half-size; Y half-size; Z half-size) for box geom:rtype: np.array(3)"""geom_id = mujoco.mj_name2id(model, MJ_GEOM_OBJ, geom_name)if model.geom_type[geom_id] == MJ_BOX or model.geom_type[geom_id] == MJ_CYLINDER:return model.geom_size[geom_id, :]else:return Nonedef get_geom_friction(model, geom_name):geom_id = mujoco.mj_name2id(model, MJ_GEOM_OBJ, geom_name)return model.geom_friction[geom_id, :]def get_body_mass(model, body_name):body_id = mujoco.mj_name2id(model, MJ_BODY_OBJ, body_name)return model.body_mass[body_id]def get_body_pose(model, body_name):body_id = mujoco.mj_name2id(model, MJ_BODY_OBJ, body_name)return model.body_pos[body_id], model.body_quat[body_id]def get_mesh_vertex_pos(model, geom_name):geom_id = mujoco.mj_name2id(model, MJ_GEOM_OBJ, geom_name)assert model.geom_type[geom_id] == MJ_MESHmesh_id = model.geom_dataid[geom_id]first_vertex_id = model.mesh_vertadr[mesh_id]no_vertex = model.mesh_vertnum[mesh_id]vertex_pos = model.mesh_vert[first_vertex_id:first_vertex_id + no_vertex]return vertex_posdef set_geom_size(model, geom_name, size):geom_id = mujoco.mj_name2id(model, MJ_GEOM_OBJ, geom_name)model.geom_size[geom_id, :] = sizedef set_body_mass(model, body_name, mass):body_id = mujoco.mj_name2id(model, MJ_BODY_OBJ, body_name)model.body_mass[body_id] = massdef set_geom_friction(model, geom_name, friction):geom_id = mujoco.mj_name2id(model, MJ_GEOM_OBJ, geom_name)model.geom_friction[geom_id, :] = frictiondef set_body_pose(model, body_name, pos, quat):body_id = mujoco.mj_name2id(model, MJ_BODY_OBJ, body_name)model.body_pos[body_id, :] = posmodel.body_quat[body_id, :] = quatdef set_body_pose_rotm(model, body_name, pos, R):quat = mat2quat(R)body_id = mujoco.mj_name2id(model, MJ_BODY_OBJ, body_name)model.body_pos[body_id, :] = posmodel.body_quat[body_id, :] = quat# -------- GEOMETRY TOOLs
def quat_error(q1, q2):"""Compute the rotation vector (expressed in the base frame), that if followin a unit time, will transform a body with orientation `q1` toorientation `q2`:param list/np.ndarray q1: Description of parameter `q1`.:param list/np.ndarray q2: Description of parameter `q2`.:return: a 3D rotation vector:rtype: np.ndarray"""if isinstance(q1, list):q1 = np.array(q1)if isinstance(q2, list):q2 = np.array(q2)dtype = q1.dtypeneg_q1 = np.zeros(4, dtype=dtype)err_rot_quat = np.zeros(4, dtype=dtype)err_rot = np.zeros(3, dtype=dtype)if q1.dot(q2) < 0:q1 = -q1mujoco.mju_negQuat(neg_q1, q1)mujoco.mju_mulQuat(err_rot_quat, q2, neg_q1)mujoco.mju_quat2Vel(err_rot, err_rot_quat, 1)return err_rotdef quat2mat(q):"""Tranform a quaternion to rotation amtrix.:param type q: Description of parameter `q`.:return: 3x3 rotation matrix:rtype: np.array"""mat = np.zeros(9)mujoco.mju_quat2Mat(mat, q)return mat.reshape((3, 3))def pose_transform(p1, q1, p21, q21):"""Coordinate transformation between 2 frames:param np.ndarray p1: position in frame 1:param np.ndarray q1: orientation (quaternion) in frame 1:param np.ndarray p21: relative position between frame 1 and 2:param np.ndarray q21: relative orientation between frame 1 and 2:return: position and orientation in frame 2:rtype: type"""# quat to rotation matrixR21 = quat2mat(q21)p2 = p21 + R21.dot(p1)q2 = np.zeros_like(q1)mujoco.mju_mulQuat(q2, q21, q1) # q2 = q21*q1return p2, q2def integrate_quat(q, r, dt):"""Integrate quaternion by a fixed angular velocity over the duration dt.:param np.array(4) q: quaternion.:param np.array(3) r: angular velocity.:param float dt: duration.:return: result quaternion.:rtype: np.array(4)"""qres = np.zeros(4)qe = np.zeros(4)r = r * dtangle = np.linalg.norm(r)if angle < 1e-9:# if angle too small then return current qreturn q.copy()axis = r / anglemujoco.mju_axisAngle2Quat(qe, axis, angle)mujoco.mju_mulQuat(qres, qe, q)return qresdef transform_spatial(v1, q21):"""Coordinate transformation of a spatial vector. The spatial vector can be eithertwist (linear + angular velocity) or wrench (force + torque):param type v1: Spatial vector in frame 1:param type q21: transformation matrix (in terms of quaternion):return: Description of returned object.:rtype: type"""R21 = quat2mat(q21)R = np.block([[R21, np.zeros((3, 3))], [np.zeros((3, 3)), R21]])return R.dot(v1)def similarity_transform(A1, q21):"""Similarity transformation of a matrix from frame 1 to frame 2A2 = R21 * A1 * R12:param np.array((3, 3)) A1: 3x3 matrix.:param np.array(4) q21: quaternion representation.:return: 3x3 matrix:rtype: np.array"""R21 = quat2mat(q21)return R21.dot(A1.dot(R21.T))# NOTE: there are infinite rotation vector solutions for a particular
# orientation, the `ref` is to find the closest solution to a reference.
# Is there another minimal representation that could avoid this?
def quat2vec(q, ref=None):"""Transform quaternion representation to rotation vector representation"""r = np.zeros(3)scale = 1mujoco.mju_quat2Vel(r, q, scale)if ref is not None:if r.dot(ref) < 0:angle = np.linalg.norm(r)r = r / angleangle = angle - 2 * np.pir = r * anglereturn rdef inverse_frame(p, q):pi, qi = np.zeros(3), np.zeros(4)mujoco.mju_negPose(pi, qi, p, q)return pi, qidef mat2quat(R):R = R.flatten()q = np.zeros(4)mujoco.mju_mat2Quat(q, R)return qdef mul_quat(q1, q2):q = np.zeros(4)mujoco.mju_mulQuat(q, q1, q2)return q
https://github.com/google-deepmind/mujoco_menagerie![]() https://github.com/google-deepmind/mujoco_menagerie
https://github.com/google-deepmind/mujoco_menagerie
https://github.com/ARISE-Initiative/robosuite![]() https://github.com/ARISE-Initiative/robosuite
https://github.com/ARISE-Initiative/robosuite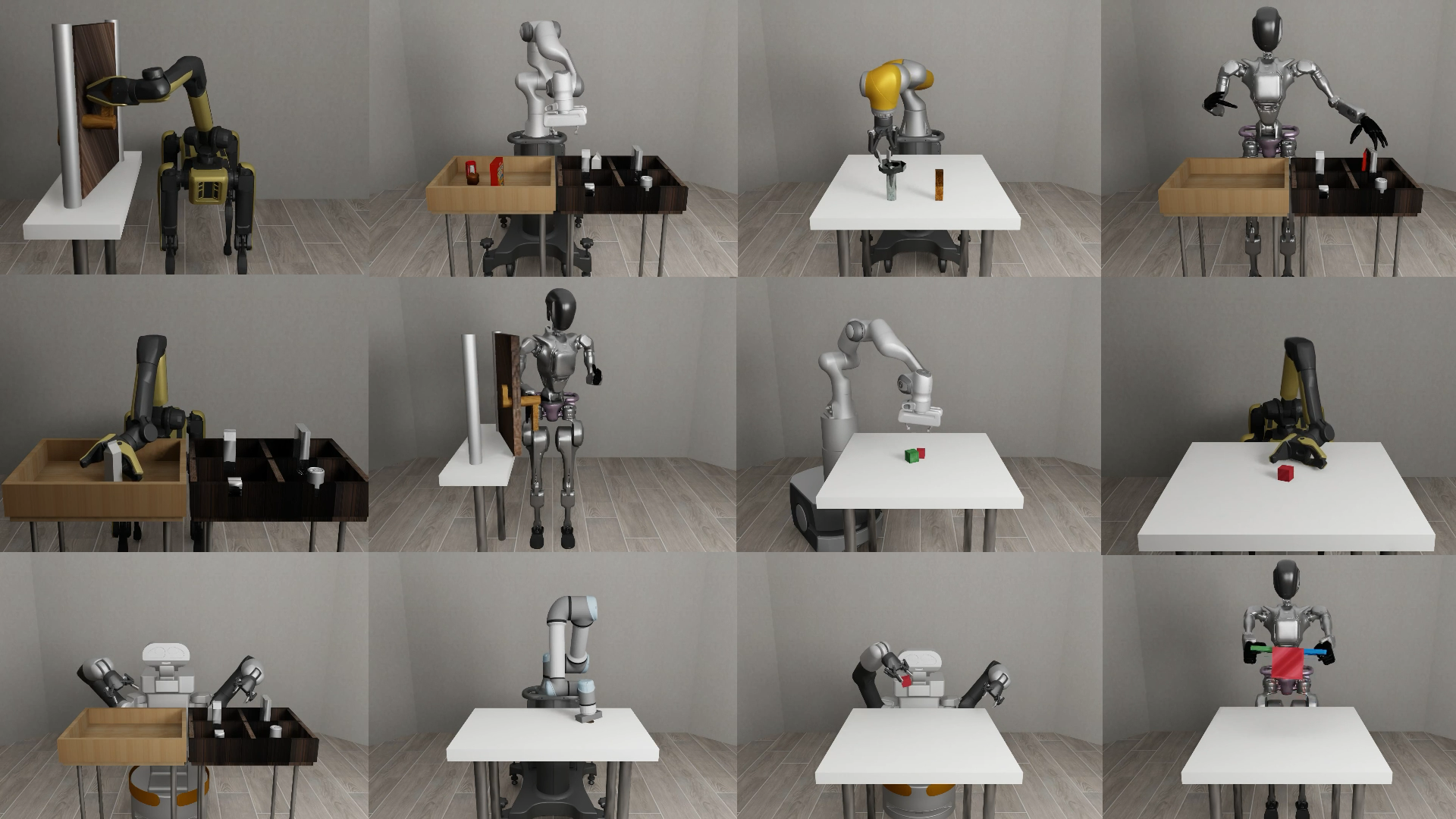
相关文章:
Mujoco robosuite 机器人模型
import ctypes import os# 获取当前脚本所在的目录 script_dir os.path.dirname(os.path.abspath(__file__))# 构建库文件的相对路径 lib_relative_path os.path.join(dynamic_models, UR5e, Jb.so)# 拼接成完整的路径 lib_path os.path.join(script_dir, lib_relative_path…...

在Ubuntu 18.04下编译OpenJDK 11
在Ubuntu 18.04下编译OpenJDK 11 源码下载地址: 链接: https://pan.baidu.com/s/1QAdu-B6n9KqeBakGlpBS3Q 密码: 8lho Linux下的环境要求 不同版本的jdk会要求在不同版本的Ubuntu下编译,不要用太高版本的Ubuntu或者gcc,特别是gcc…...
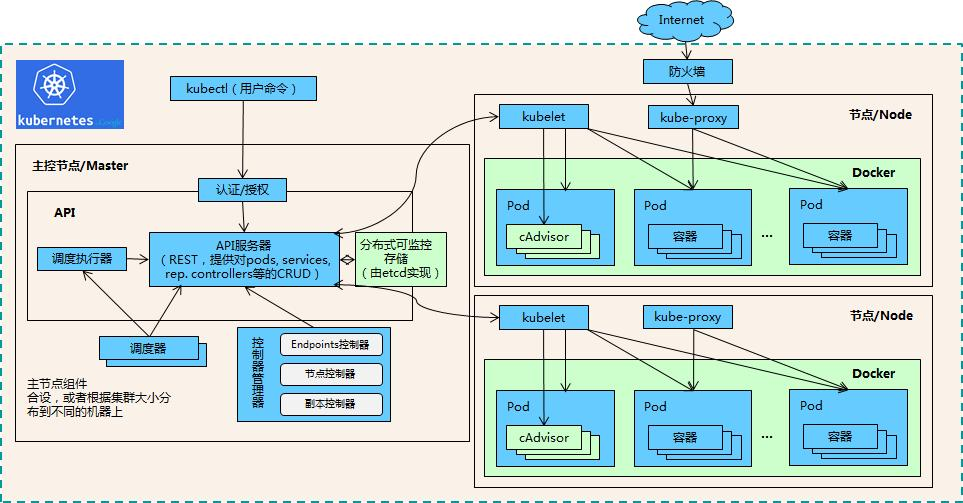
K8s:概念、特点、核心组件与简单应用
一、引言 在当今云计算和容器技术蓬勃发展的时代,Kubernetes(简称 K8s)已成为容器编排领域的事实标准。它为管理容器化应用提供了高效、可靠的解决方案,极大地简化了应用的部署、扩展和运维过程。无论是小型初创公司还是大型企业…...

STM32的定时器输出PWM时,死区时间(DTR)如何计算
在 STM32F429(以及所有 STM32F4 “高级定时器”)中,死区时间由 TIMx_BDTR 寄存器的 8 位 “Dead‑Time Generator” 字段 DTG[7:0] 来配置。其计算分三步: 计算死区时钟周期 tDTS TIM1 时钟源为 APB2 定时器时钟(PCL…...
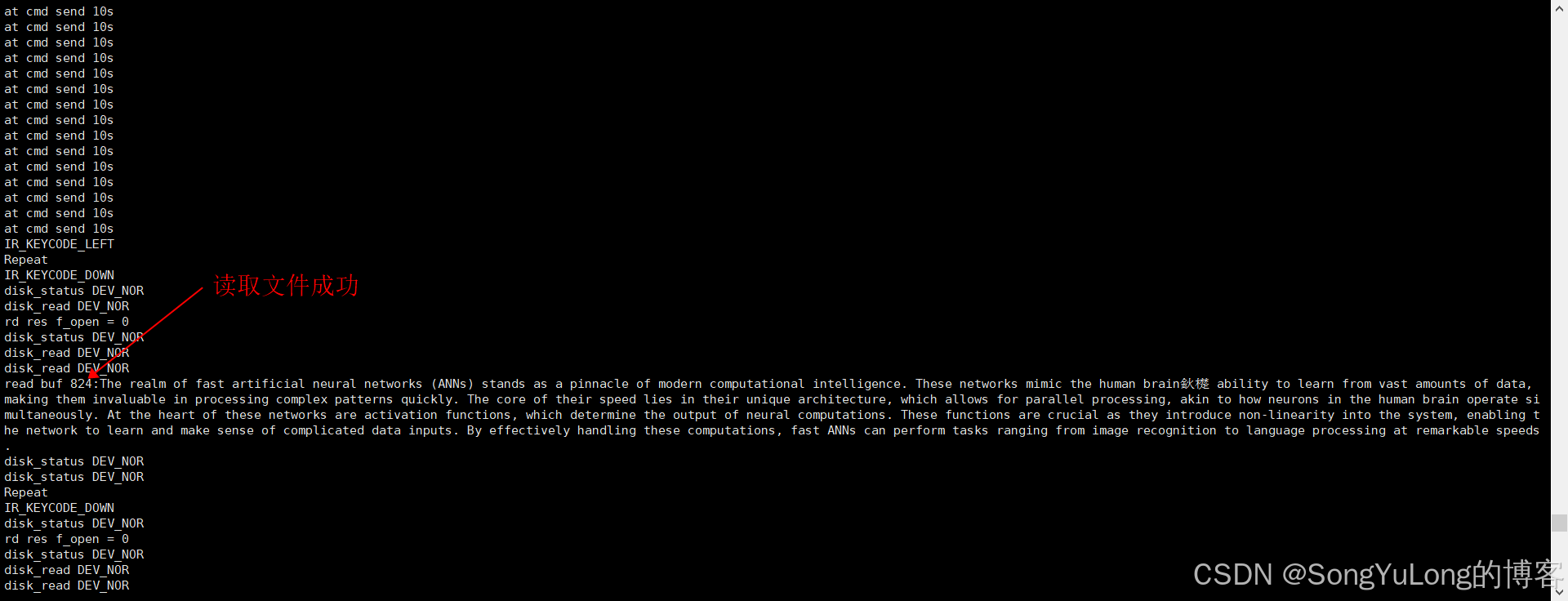
STC32G12K128单片机GPIO模式SPI操作NorFlash并实现FatFS文件系统
STC32G12K128单片机GPIO模式SPI操作NorFlash并实现FatFS文件系统 NorFlash简介NorFlash操作驱动代码文件系统测试代码 NorFlash简介 NOR Flash是一种类型的非易失性存储器,它允许在不移除电源的情况下保留数据。NOR Flash的名字来源于其内部结构中使用的NOR逻辑门。…...
ClickHouse 设计与细节
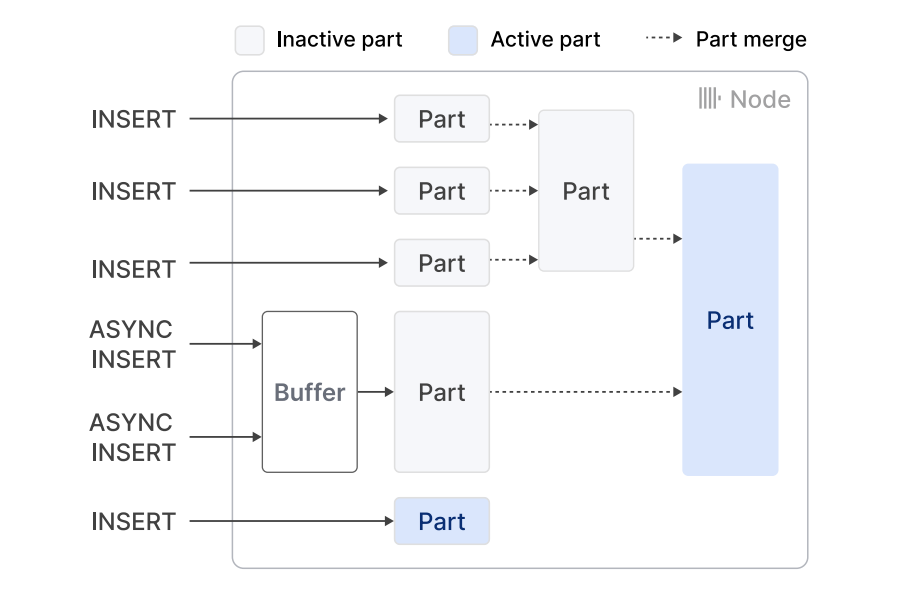
1. 引言 ClickHouse 是一款备受欢迎的开源列式在线分析处理 (OLAP) 数据库管理系统,专为在海量数据集上实现高性能实时分析而设计,并具备极高的数据摄取速率 1。其在各种行业中得到了广泛应用,包括众多知名企业,例如超过半数的财…...

MySQL基础安装和学习
MySQL 是一种开源的关系型数据库管理系统(RDBMS),由瑞典公司 MySQL AB 开发,后被 Oracle 公司收购。它是一种基于客户端/服务器架构的数据库系统,广泛应用于 Web 应用开发和企业级数据管理。 MySQL 使用 SQL(Structured Query Language,结构化查询语言)作为与数据库交…...

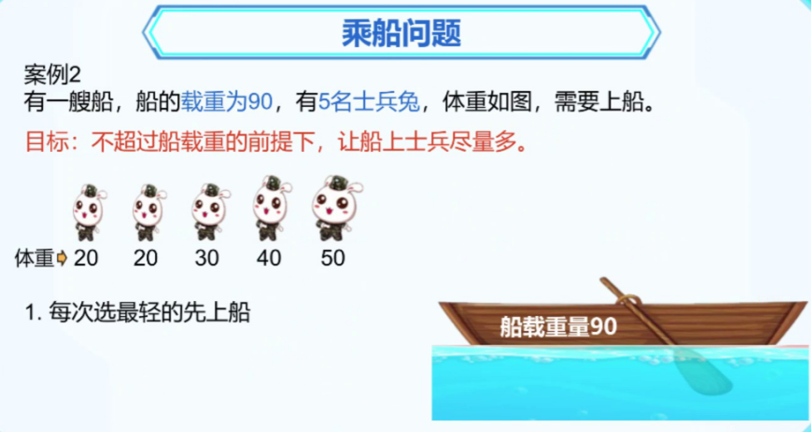
智能体MCP 实现数据可视化分析
参考: 在线体验 https://www.doubao.com/chat/ 下载安装离线体验 WPS软件上的表格分析 云上创建 阿里mcp:https://developer.aliyun.com/article/1661198 (搜索加可视化) 案例 用cline 或者cherry studio实现 mcp server:excel-mcp-server、quickchart-mcp-server...
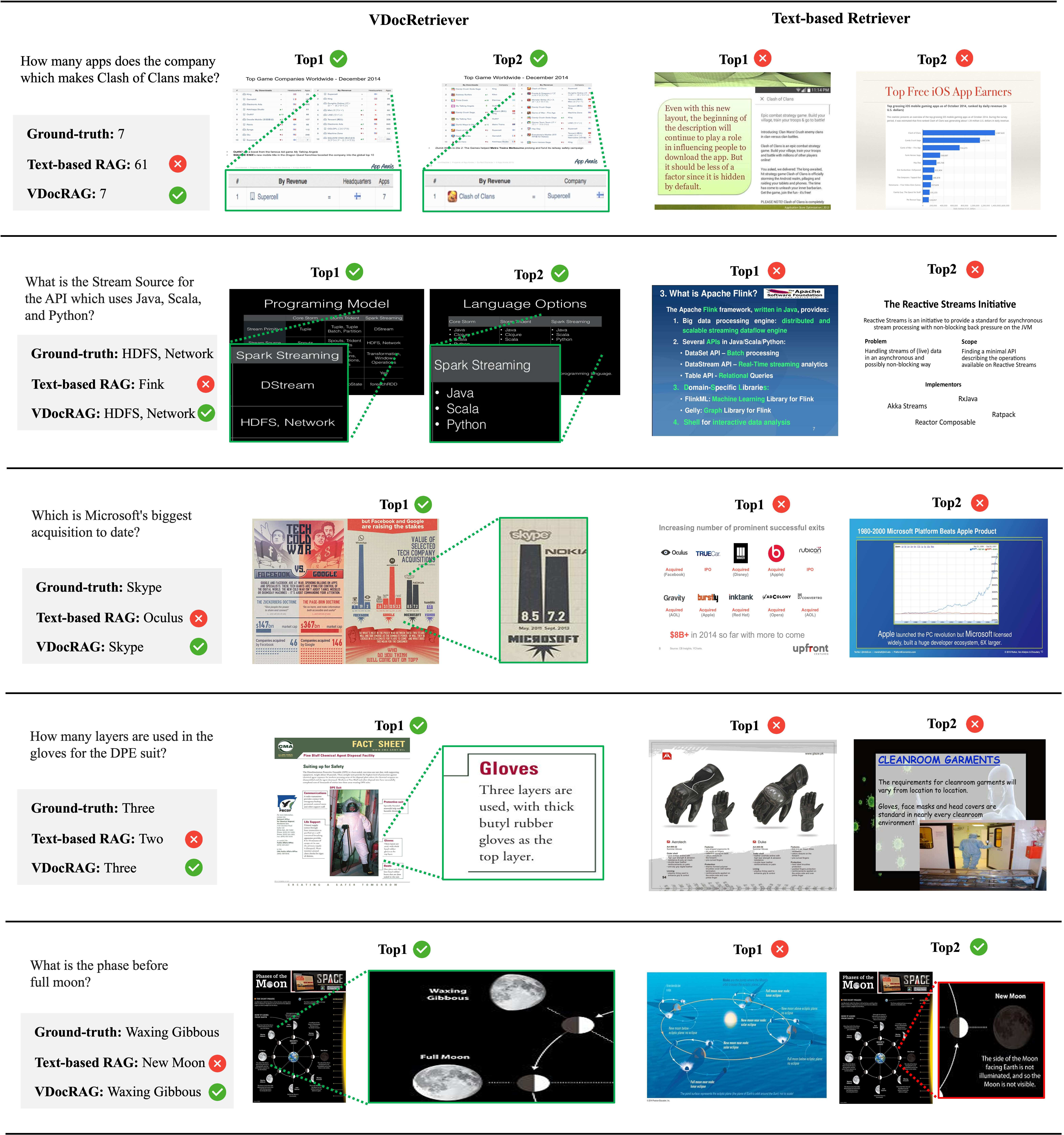
再看开源多模态RAG的视觉文档(OCR-Free)检索增强生成方案-VDocRAG
前期几个工作提到,基于OCR的文档解析RAG的方式进行知识库问答,受限文档结构复杂多样,各个环节的解析泛化能力较差,无法完美的对文档进行解析。因此出现了一些基于多模态大模型的RAG方案。如下: 【RAG&多模态】多模…...

生产环境大数据平台权限管理
引言:数据资产保护的生死线 在金融行业某头部企业发生的数据泄露事件中,由于权限管理漏洞导致千万级用户信息外泄,直接经济损失超过2.3亿元。这个案例揭示了生产环境大数据平台权限管理的重要性和复杂性。本文将深入探讨从权限模型设计到实施…...
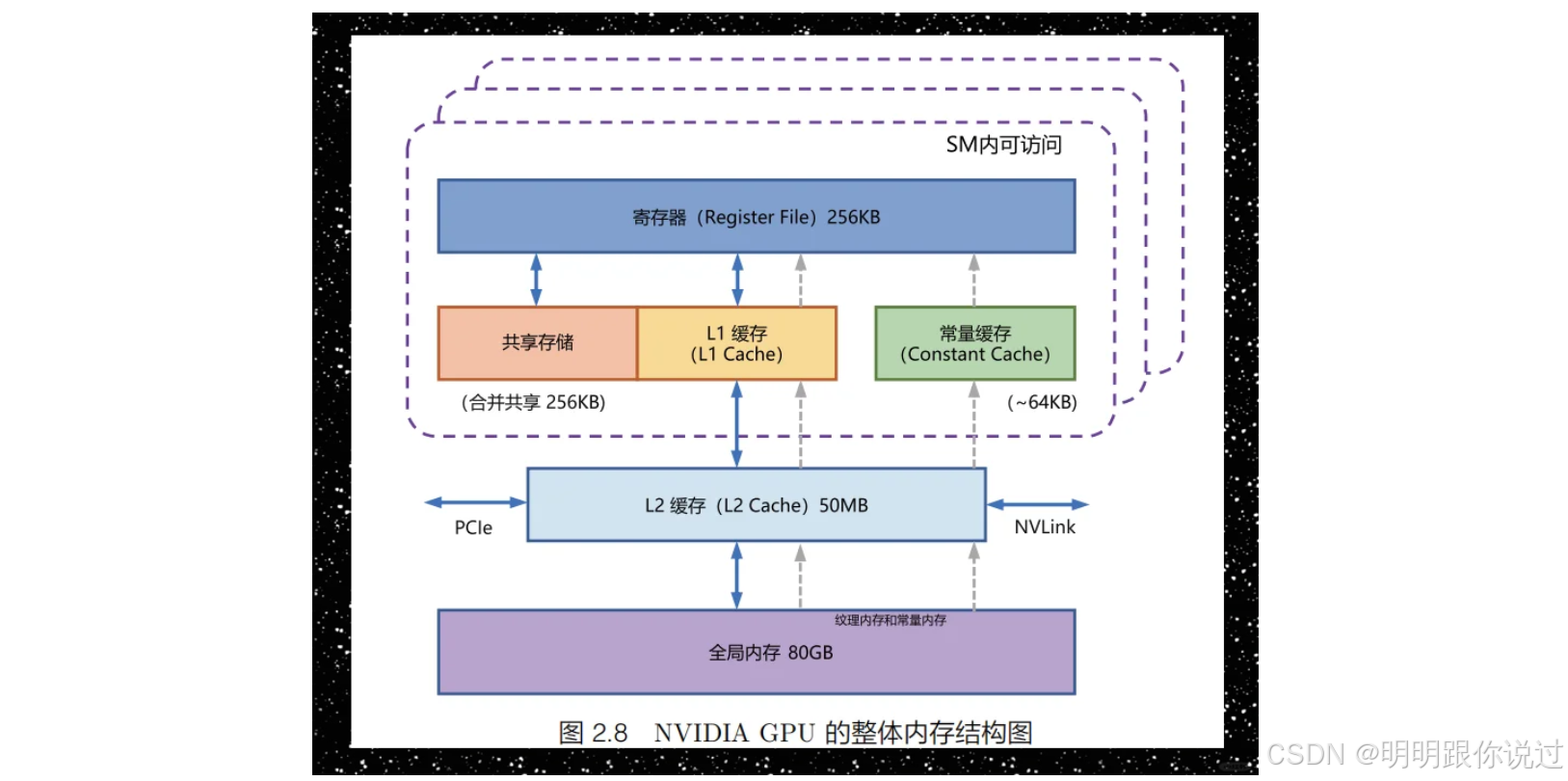
深入浅出 NVIDIA CUDA 架构与并行计算技术
🐇明明跟你说过:个人主页 🏅个人专栏:《深度探秘:AI界的007》 🏅 🔖行路有良友,便是天堂🔖 目录 一、引言 1、CUDA为何重要:并行计算的时代 2、NVIDIA在…...
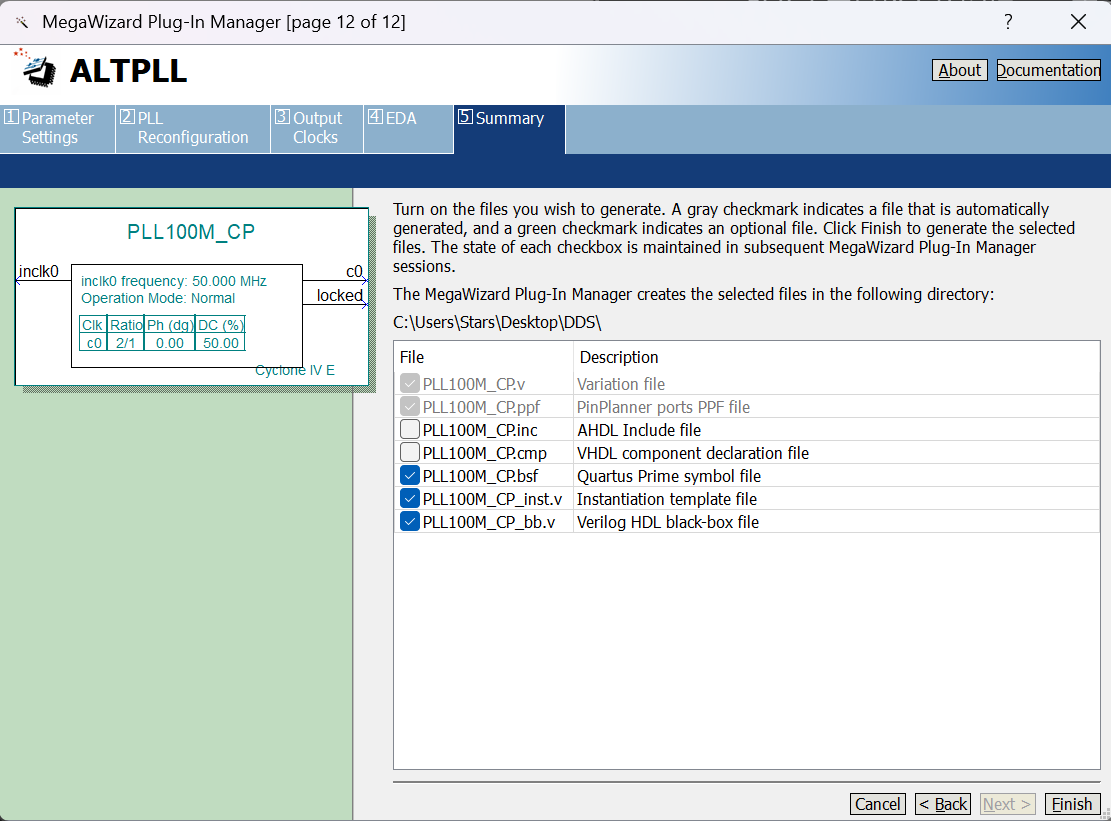
FPGA系列之DDS信号发生器设计(DE2-115开发板)
一、IP核 IP(Intellectual Property)原指知识产权、著作权等,在IC设计领域通常被理解为实现某种功能的设计。IP模块则是完成某种比较复杂算法或功能(如FIR滤波器、FFT、SDRAM控制器、PCIe接口、CPU核等)并且参数可修改的电路模块,…...

Rust: 从内存地址信息看内存布局
内存布局其实有几个:address(地址)、size(大小)、alignment(对齐位数,2 的自然数次幂,2,4,8…)。 今天主要从address来看内存的布局。 说明&…...

【Dv3Admin】从零搭建Git项目安装·配置·初始化
项目采用 Django 与 Vue3 技术栈构建,具备强大的后端扩展能力与现代前端交互体验。完整实现了权限管理、任务队列、WebSocket 通信、系统配置等功能,适用于构建中后台管理系统与多租户平台。 本文章内容涵盖环境搭建、虚拟环境配置、前后端部署、项目结…...

P3416-图论-法1.BFS / 法2.Floyd
这道题虽然标签有floyd但是直接bfs也能过 其实事实证明还是bfs快,因为bfs只需要遍历特定的点,但是floyd需要考虑遍历所有可能的中介点 法1.BFS 用字典存储每个点所能普及的范围,然后用对每个点bfs进行拓展 nint(input())temp[]#xmax0;yma…...
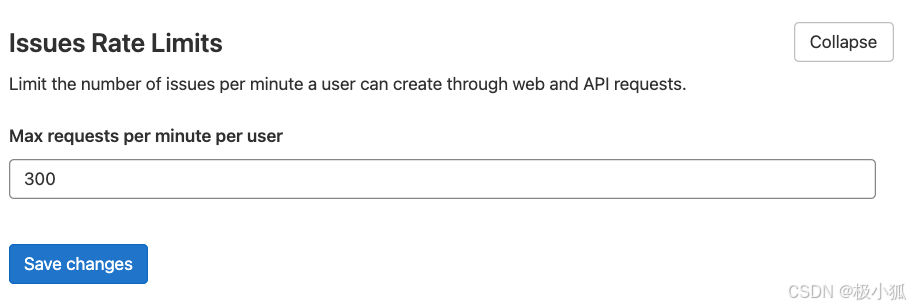
极狐GitLab 议题和史诗创建的速率限制如何设置?
极狐GitLab 是 GitLab 在中国的发行版,关于中文参考文档和资料有: 极狐GitLab 中文文档极狐GitLab 中文论坛极狐GitLab 官网 议题和史诗创建的速率限制 (BASIC SELF) 速率限制是为了控制新史诗和议题的创建速度。例如,如果您将限制设置为 …...

提交到Gitee仓库
文章目录 注册配置公钥创建空白的码云仓库把本地项目上传到码云对应的空白仓库中 注册 注册并激活码云账号( 注册页面地址:https://gitee.com/signup ) 可以在自己C盘/用户/用户名/.ssh 可以看到 有id_rsa.pub 以前在GitHub注册时搞过&…...
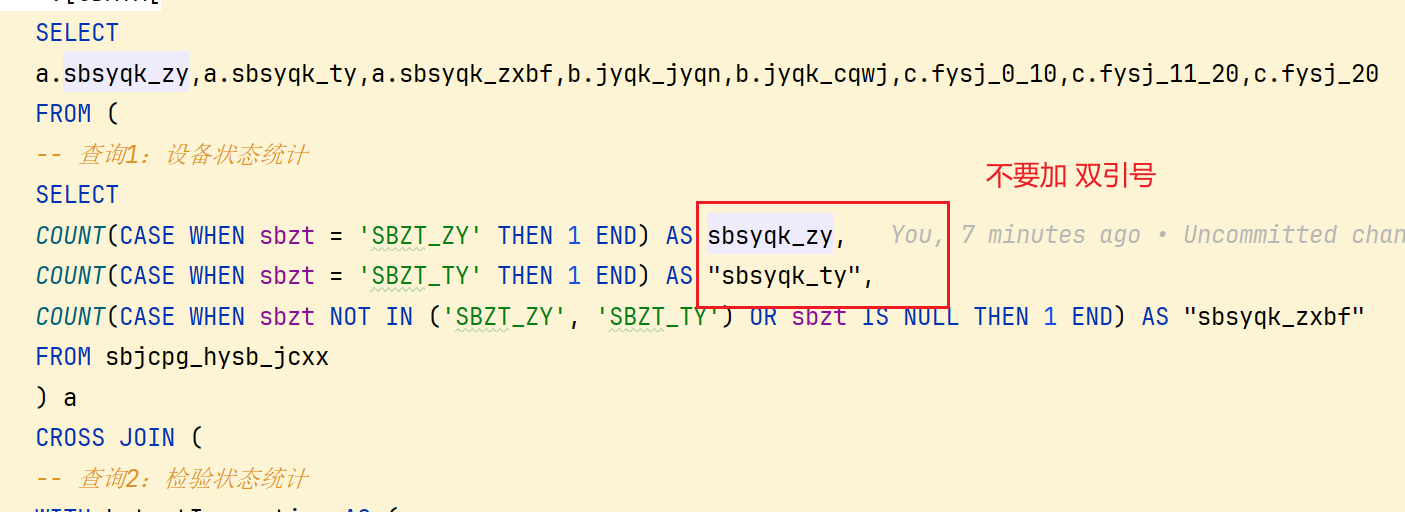
oracle中错误总结
oracle中给表起别名不能用as,用as报错 在 Oracle 数据库中,WITH 子句(即 CTE,公共表表达式)允许后续定义的子查询引用前面已经定义的 CTE,但 前面的 CTE 无法引用后面的 CTE。这种设计类似…...

纽约大学具身智能体在城市空间中的视觉导航之旅!CityWalker:从海量网络视频中学习城市导航
作者:Xinhao Liu, Jintong Li, Yicheng Jiang, Niranjan Sujay, Zhicheng Yang, Juexiao Zhang, John Abanes, Jing Zhang, Chen Feng单位:纽约大学论文标题:CityWalker: Learning Embodied Urban Navigation from Web-Scale Videos论文链接&…...

Go语言中 defer 使用场景及深度注意事项指南
文章精选推荐 1 JetBrains Ai assistant 编程工具让你的工作效率翻倍 2 Extra Icons:JetBrains IDE的图标增强神器 3 IDEA插件推荐-SequenceDiagram,自动生成时序图 4 BashSupport Pro 这个ides插件主要是用来干嘛的 ? 5 IDEA必装的插件&…...
OpenCV颜色变换cvtColor
OpenCV计算机视觉开发实践:基于Qt C - 商品搜索 - 京东 颜色变换是imgproc模块中一个常用的功能。我们生活中看到的大多数彩色图片都是RGB类型的,但是在进行图像处理时需要用到灰度图、二值图、HSV(六角锥体模型,这个模型中颜色的…...

Manus技术架构、实现内幕及分布式智能体项目实战
Manus技术架构、实现内幕及分布式智能体项目实战 模块一: 剖析Manus分布式多智能体全生命周期、九大核心模块及MCP协议,构建低幻觉、高效且具备动态失败处理能力的Manus系统。 模块二: 解析Manus大模型Agent操作电脑的原理与关键API…...
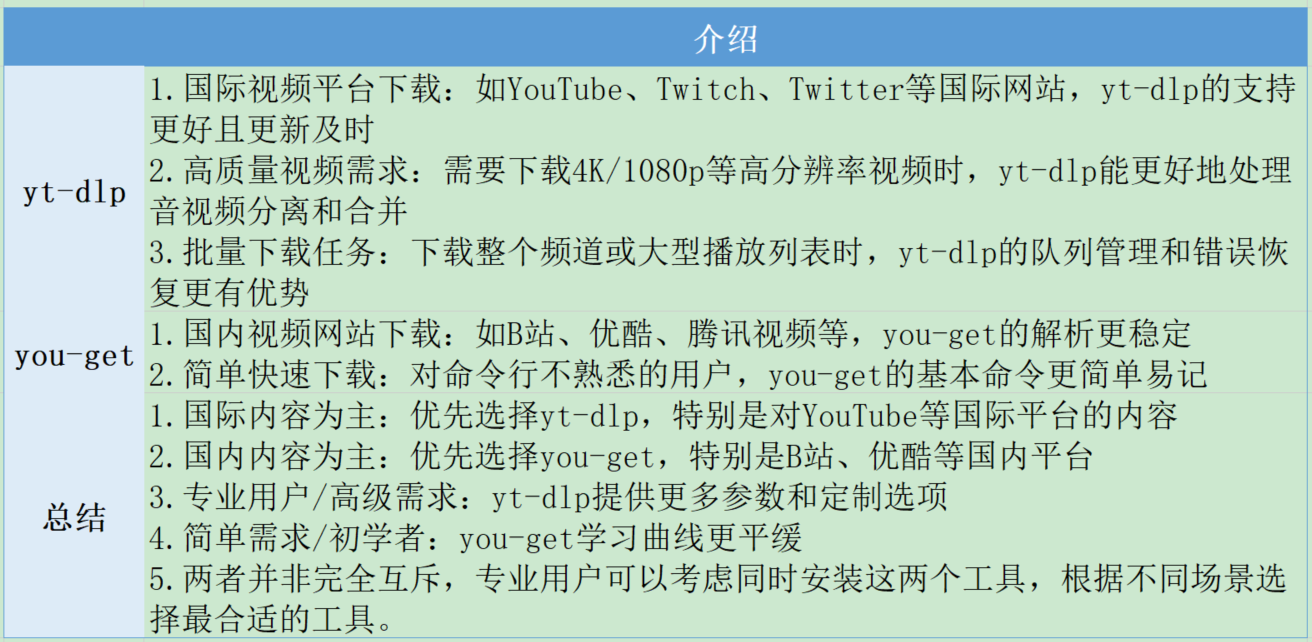
下载油管视频 - yt-dlp
文章目录 1. yt-dlp与you-get介绍1.1 主要功能对比1.2 使用场景1.3 安装 2. 基本命令介绍2.1 默认下载视频2.2 指定画质和格式规则2.3 下载播放列表2.4 备注 3. 参考资料 之前只使用you-get下载b站视频,当时了解you-get也可下载油管视频,但之前无此需求&…...

济南通过首个备案生活服务大模型,打造行业新标杆
近日,一则振奋人心的消息在人工智能领域传开:济南本土企业丽阳神州智能科技有限公司自主研发的 “丽阳雨露” 大模型成功通过国家网信办的备案。这一成果不仅是济南企业在科技创新道路上的重大突破,更标志着我国在生活服务领域的人工智能应用…...

系统架构师2025年论文《论软件三层结构的设计》
论软件三层结构的设计 摘要: 我所在的单位是某市主要医院之一,作为单位的主要技术骨干,2009 年 1 月,我主持了某市医院预约挂号系统的开发,该系统是医院信息化管理系统的一个子系统,由于医院系统对安全性、可靠性、可用性和响应速度要求很高,我选择了三层 C/S 结构作为…...
第6次课 贪心算法 A
向日葵朝着太阳转动,时刻追求自身成长的最大可能。 贪心策略在一轮轮的简单选择中,逐步导向最佳答案。 课堂学习 引入 贪心算法(英语:greedy algorithm),是用计算机来模拟一个「贪心」的人做出决策的过程…...

C# 高级编程:Lambda 表达式
在 C# 的高级编程中,Lambda 表达式是一个强大而灵活的工具,广泛应用于 LINQ 查询、委托、事件处理以及函数式编程等多个领域。它不仅使代码更简洁、表达更直接,而且在某些场景中能极大提高代码的可读性与可维护性。本文将从 Lambda 表达式的基本语法入手,深入探讨其原理、常…...
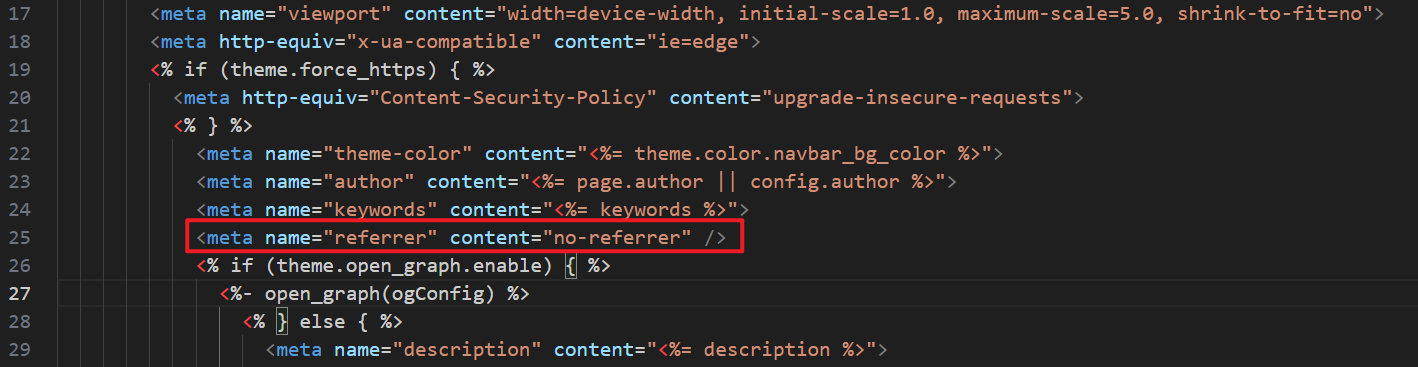
Hexo+Github+gitee图床零成本搭建自己的专属博客
一个详细、完善的 Hexo 博客部署教程,不仅涵盖了基本的安装、配置、生成与部署步骤,还增加了常见问题的解决、主题设置、图片上传等 在开始之前可以看看我最终搭建出来的成果:https://liangjh.blog 1.安装git和nodejs 在Windows上使用Git&a…...
数字信号处理技术架构与功能演进
数字信号处理(DSP)是通过数字运算实现信号分析、变换、滤波及调制解调的技术领域,其发展过程与技术应用如下: 一、定义与核心功能 技术定义:通过算法将模拟信号转换为数字形式进行处理,具有高精度、可编程…...
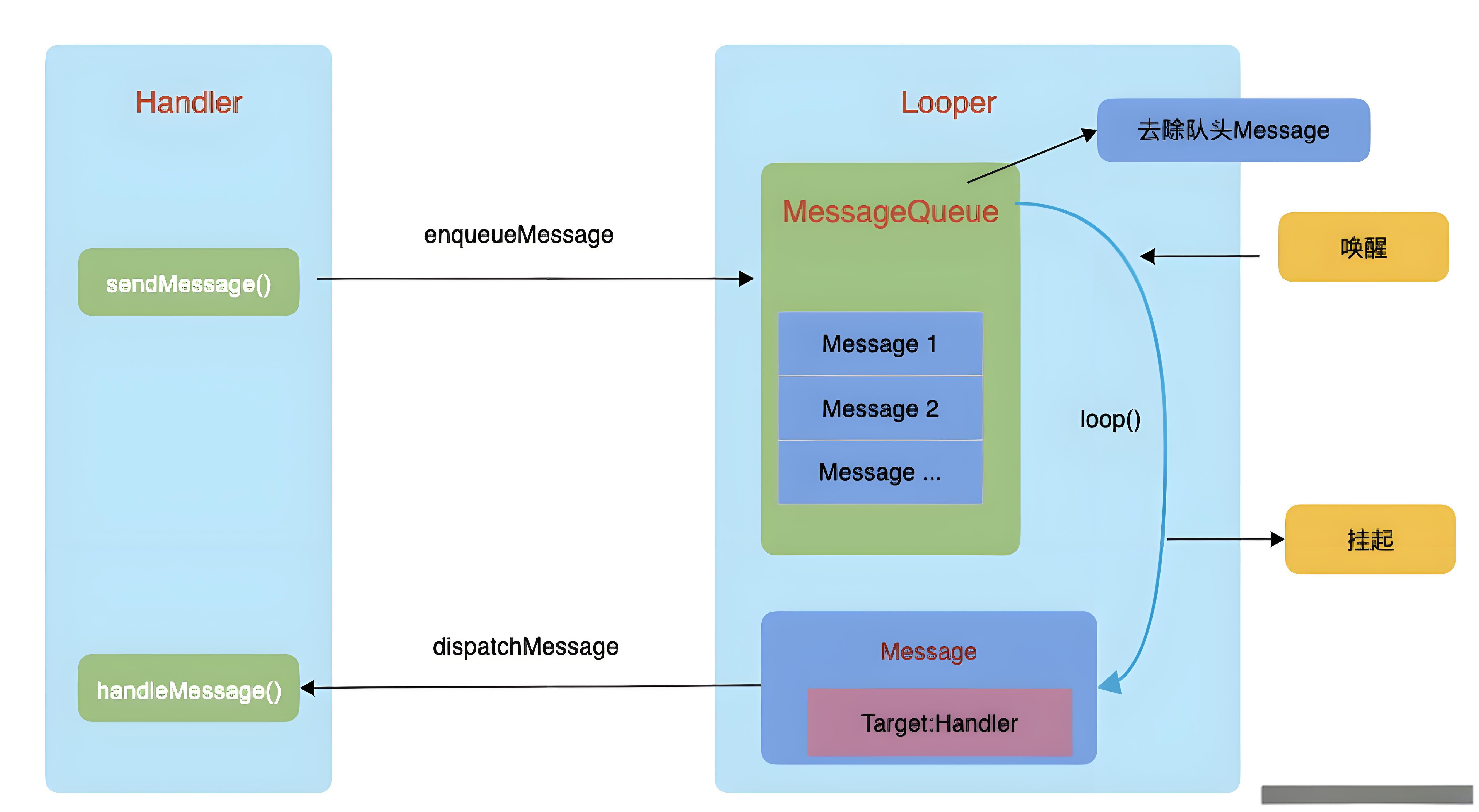
深入理解 Android Handler
一、引言 Handler 在安卓中的地位是不言而喻的,几乎维系着整个安卓程序运行的生命周期,但是这么重要的一个东西,我们真的了解它吗?下面跟随着我的脚步,慢慢揭开Hanler的神秘面纱吧! 本文将介绍Handler 的运…...