自主机器人模拟系统
一、系统概述
本代码实现了一个基于Pygame的2D自主机器人模拟系统,具备以下核心功能:
-
双模式控制:支持手动控制(WASD键)和自动导航模式(鼠标左键设定目标)
-
智能路径规划:采用改进型A*算法进行全局路径规划
-
动态避障:基于LIDAR传感器的实时障碍物检测与智能规避
-
状态恢复:具备卡死检测与自主恢复机制
-
数据记录:支持运动轨迹和状态参数的CSV格式记录
-
可视化交互:实时显示机器人状态、传感器数据和环境信息
二、核心功能分析
-
机器人控制系统
-
状态机管理:包含7种状态(Manual/Recovery/Avoiding/Stuck等)
-
运动控制:
-
自动模式:PID式转向控制,速度与距离自适应
-
手动模式:独立速度参数(前进4px/frame,后退2px/frame)
-
-
传感器系统:
-
360° LIDAR扫描(5°分辨率,150px范围)
-
前向90°安全检测区域(半径25px)
-
-
-
避障机制
-
间隙导航策略:
-
扫描前方±90°区域
-
识别最大可通过间隙(>30°)
-
朝向间隙中心点导航
-
-
应急策略:
-
最近障碍物反向规避
-
完全阻塞时最大距离导航
-
-
-
路径规划系统
-
改进型A*算法:
-
网格尺寸20px
-
8方向移动(含对角线)
-
障碍物膨胀处理(机器人半径补偿)
-
-
动态重规划:
-
固定间隔重规划(3秒)
-
障碍物变化即时重规划
-
卡死状态强制重规划
-
-
-
异常处理系统
-
卡死检测:
-
1.5秒无位移判定
-
随机方向恢复旋转(0.75秒)
-
-
碰撞预测:
-
前向运动预检测
-
边界限制(屏幕范围)
-
-
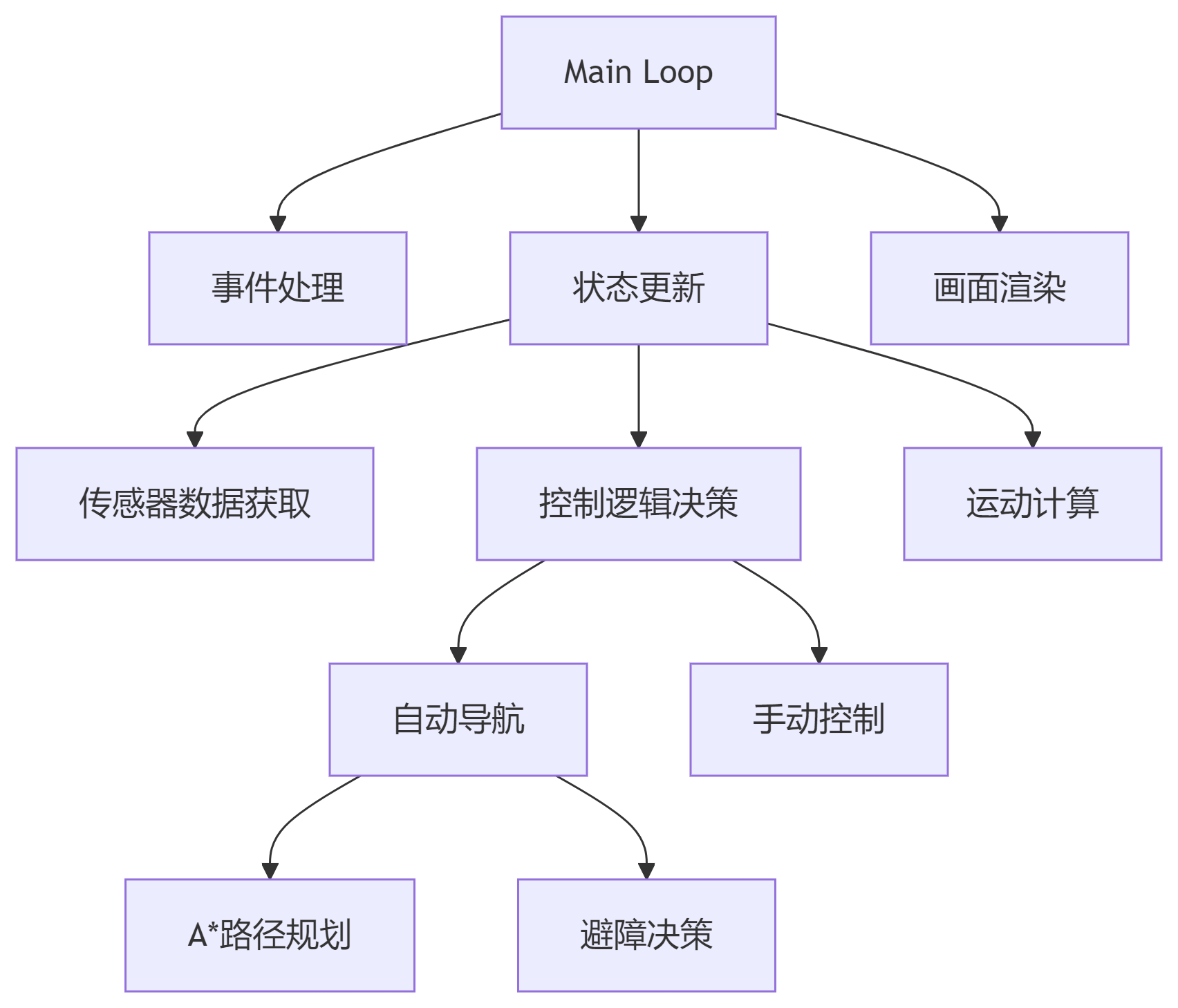
三、技术实现细节
-
架构设计
-
性能参数
类别 参数 值 物理 机器人半径 15px 运动 基础转向速度 4°/frame 传感器 LIDAR分辨率 5° 路径规划 网格尺寸 20px 系统 刷新率 60FPS
四、代码结构分析
-
模块组成
-
参数定义区:全局配置参数
-
Robot类:核心控制逻辑(1200+行)
-
Obstacle类:障碍物对象
-
A*算法:独立路径规划函数
-
主循环:Pygame事件管理与渲染
-
-
**关键设计模式
-
状态模式:通过状态标志位管理行为逻辑
-
观察者模式:按键事件驱动状态切换
-
策略模式:可替换的路径规划算法
-
五、优缺点评估
优势:
-
模块化设计:各功能组件解耦良好
-
完备的异常处理:多级安全机制
-
可视化调试:实时显示传感器数据
-
参数可配置性:54个可调参数
改进空间:
-
计算效率:LIDAR扫描未做优化(720次/帧碰撞检测)
-
运动控制:缺乏速度插值,急停急起
-
路径规划:未考虑动态障碍物
-
代码结构:部分逻辑耦合度过高(如update方法)
六、优化建议
-
性能优化
-
空间划分:使用四叉树加速碰撞检测
-
LIDAR优化:增量式扫描+缓存机制
-
多线程:路径规划独立线程运行
-
-
功能扩展
# 动态障碍物示例 class DynamicObstacle(Obstacle):def update(self):self.x += self.vxself.rect.x = self.xif random.random() < 0.02: # 2%概率改变方向self.vx *= -1
-
算法改进
-
路径规划:D* Lite动态重规划算法
-
运动控制:速度轨迹规划(S曲线)
-
传感器融合:IMU数据补偿
-
-
代码重构
-
状态机独立类封装
-
控制策略抽象接口
-
配置参数类化管理
-
七、应用场景展望
-
教育领域:机器人算法教学平台
-
研究领域:SLAM算法验证平台
-
工业应用:AGV调度系统仿真
-
游戏开发:NPC智能导航引擎
附录:典型运行数据
Timestamp_ms,Frame,Mode,State,Pos_X,Pos_Y,Angle_Deg,Target_X,Target_Y,Path_Len 1718285300123,456,Auto,Avoiding,342.15,287.63,45.2,500,320,8 1718285300156,457,Auto,PathFollowing,345.78,290.12,43.8,500,320,7
该代码展现了一个完整的自主机器人系统原型,具备良好的扩展性和研究价值。建议后续重点优化算法效率,并增加传感器噪声模拟以提升真实性。
相关文章:
自主机器人模拟系统
一、系统概述 本代码实现了一个基于Pygame的2D自主机器人模拟系统,具备以下核心功能: 双模式控制:支持手动控制(WASD键)和自动导航模式(鼠标左键设定目标) 智能路径规划:采用改进型…...
基于QT的仿QQ音乐播放器
一、项目介绍 该项目是基于QT开发的⾳乐播放软件,界面友好,功能丰富,主要功能如下: 窗口hand部分: 点击最小化按钮,窗口最小化 点击最大化按钮,窗口最大化 点击关闭按钮,程序退出 …...
腾讯研究院:《工业大模型应用报告》(文末附下载方式)
腾讯研究院发布的《工业大模型应用报告》是一份系统探讨大模型技术在工业领域落地实践的研究成果。该报告基于腾讯在人工智能、云计算及产业互联网的实践经验,结合国内外典型案例,深入分析了工业大模型的行业价值、关键技术、应用场景及未来趋势。报告指…...
)
C语言-指针(一)
目录 指针 内存 概念 指针变量 取地址操作符(&) 操作符“ * ” 指针变量的大小 注意 指针类型的意义 作用 void * 指针 const修饰指针变量 const放在*前 const放在*后 双重const修饰 指针的运算 1.指针 - 整数 2.指针 - 指针 3.指…...
【DeepMLF】具有可学习标记的多模态语言模型,用于情感分析中的深度融合
这是一篇我完全看不懂的论文,写的好晦涩,适合唬人,所以在方法部分我以大白话为主 abstract 在多模态情感分析(MSA)中,多模态融合已经得到了广泛的研究,但融合深度和多模态容量分配的作用还没有得到充分的研究。在这项工作中,我们将融合深度、可扩展性和专用多模容量作…...

uniapp如何获取安卓原生的Intent对象
通过第三方app唤起,并且获取第三方app唤起时携带的参数 因为应用a唤起应用b时,应用b第一时间就要拿到参数token,所以需要将获取参数的方法写在APP.vue中的onLaunch钩子里,如果其他地方要用可以选择vuex或者采用本地缓存。 uniapp中plus.run…...
implement the “pixel-wise difference“
根据在处理图像数据的来源和格式的不同,在具体实现“两幅图像残差比较”的时候,分为两类方法。 类型一:PyTorch 的 Tensor 图像格式 imgs_pil_o [transforms.ToPILImage()(img_o) for img_o in imgs_o] imgs_pil_w [transforms.ToPILImag…...
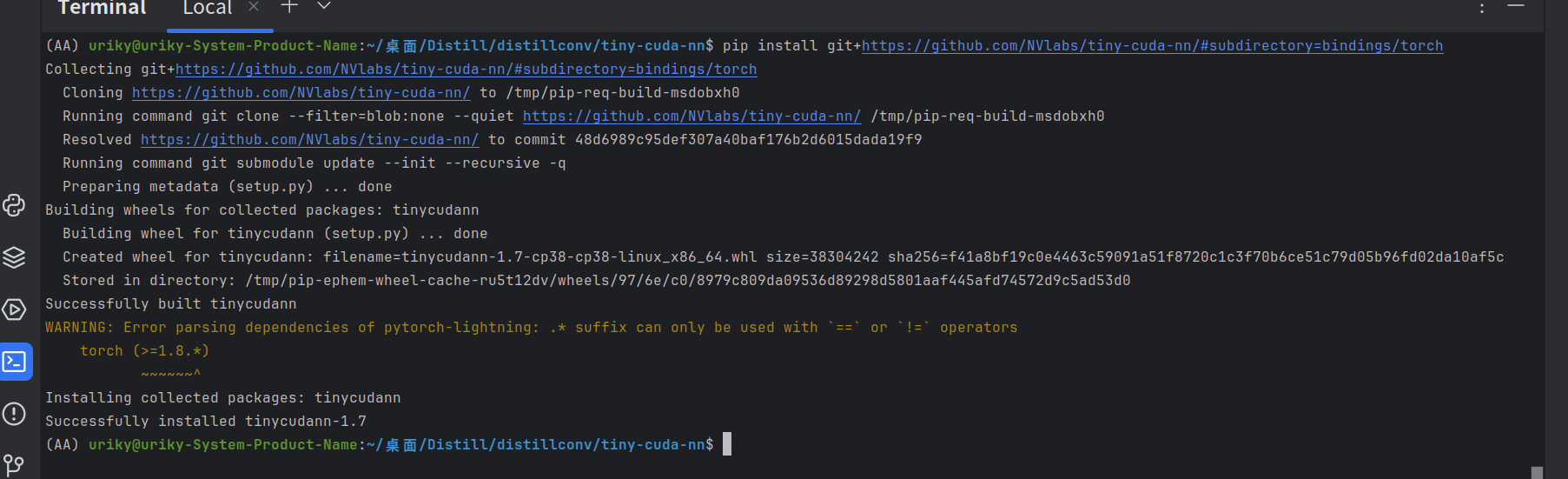
tinycudann安装过程加ubuntu18.04gcc版本的升级(成功版!!!!)
使用的是 Linux,安装以下软件包 sudo apt-get install build-essential git安装 CUDA 并将 CUDA 安装添加到您的 PATH。 例如,如果您有 CUDA 12.6.3,请将以下内容添加到您的/usr/local/~/.bashrcexport PATH"/usr/local/cuda-12.6.3/bi…...
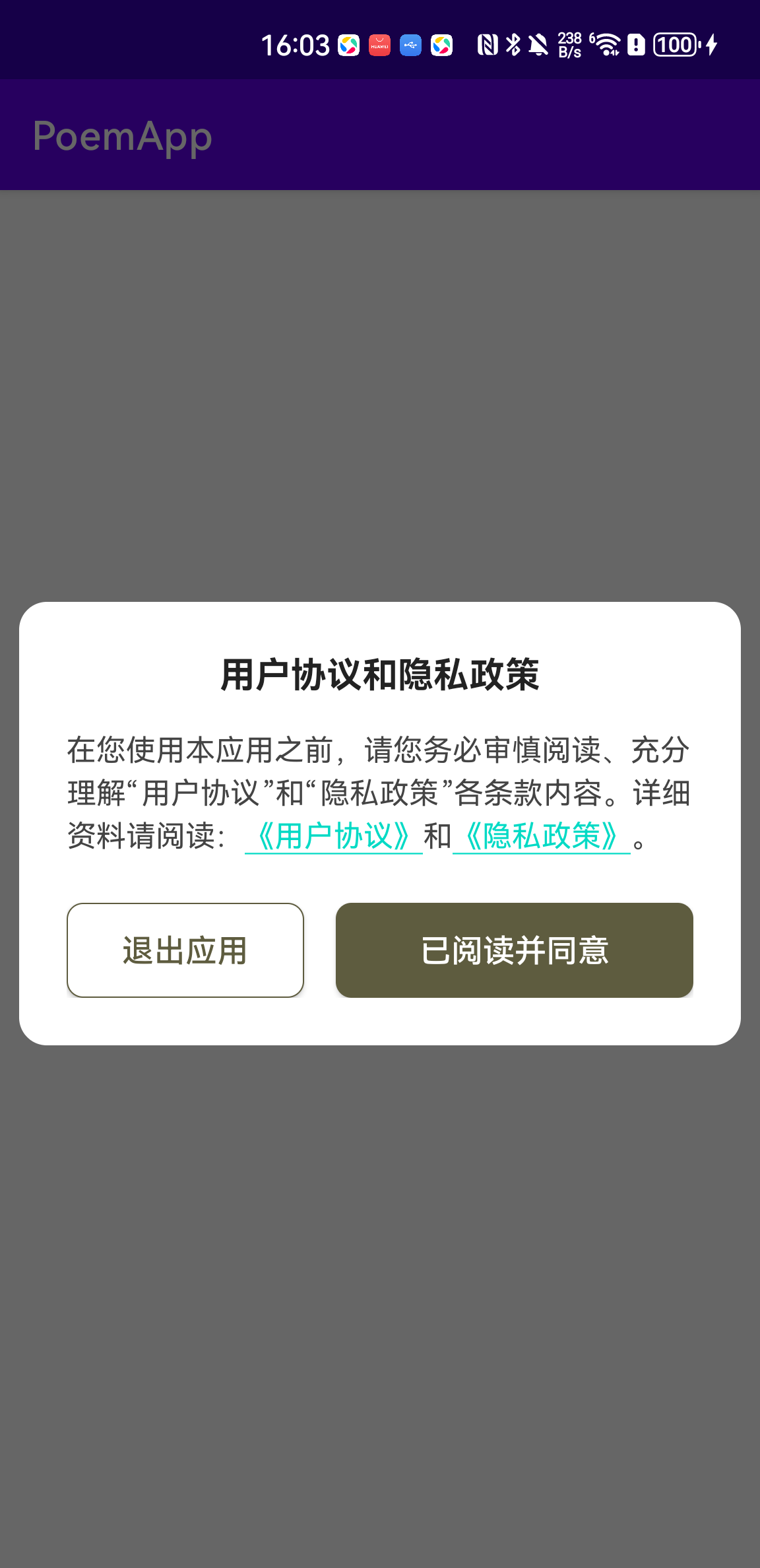
Android 实现一个隐私弹窗
效果图如下: 1. 设置同意、退出、点击用户协议、点击隐私协议的函数参数 2. 《用户协议》、《隐私政策》设置成可点击的,且颜色要区分出来 res/layout/dialog_privacy_policy.xml 文件 <?xml version"1.0" encoding"utf-8"?&…...
)
Oracle无法正常OPEN(三)
在Oracle数据库中,如果几个数据文件丢失,导致数据库无法启动,报错“ORA-01157: cannot identify/lock data file 2 - see DBWR trace file”,如果没有物理备份的情况下,位于丢失数据文件的数据是无法找回的,…...

本地服务验证-仙盟创梦IDE-智能编程,编程自动备份+编程审计
本地服务验证server using System; using System.Net;class Program {static void Main(){HttpListener listener new HttpListener();listener.Prefixes.Add("http://localhost:8080/");listener.Start();Console.WriteLine("服务器已启动,监听中…...

[学成在线]22-自动部署项目
自动部署 实战流程 下边使用jenkins实现CI/CD的流程。 1、将代码使用Git托管 2、在jenkins创建任务,从Git拉取代码。 3、拉取代码后进行自动构建:测试、打包、部署。 首先将代码打成镜像包上传到docker私服。 自动创建容器、启动容器。 4、当有代…...
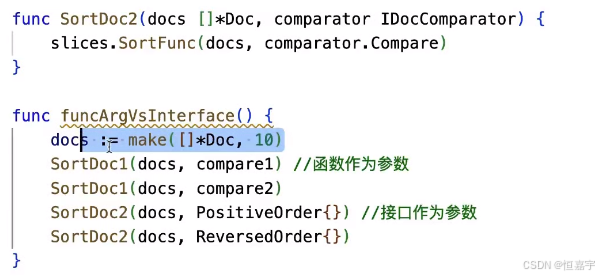
Golang|使用函数作为参数和使用接口的联系
函数作为数据类型的一种,可以成为其他函数的参数。在 Go(Golang) 中,函数作为参数 和 接口(interface),本质上都和抽象、灵活调用有关 —— 都是让代码更灵活、更可扩展的手段。不过它们各有侧重…...

MATLAB技巧——norm和vecnorm两个函数讲解与辨析
在 MATLAB 中,norm 和 vecnorm 是两个用于计算向量或矩阵范数的函数,虽然它们的功能相似,但在使用场景和适用性上存在一些区别。本文将详细解释这两个函数的用途、功能以及如何选择合适的函数。 文章目录 norm函数用法范数类型vecnorm函数用法范数类型选择合适的函数示例对比…...

ubuntu的libc 库被我 sudo apt-get --reinstall install libc6搞没了
我系统的libc 没了 今天为了运行一个开源的yuv 播放器,在运行的时候提醒 Inconsistency detected by ld.so: dl-call-libc-early-init.c: 37: _dl_call_libc_early_init: Assertion sym ! NULL failed!然后听从AI 的建议 当我去执行ls 时,系统提示 就这…...

Ubuntu搭建Conda+Python开发环境
目录 一、环境说明 1、测试环境为ubuntu24.04.1 2、更新系统环境 3、安装wget工具 4、下载miniconda安装脚本 二、安装步骤 1、安装miniconda 2、source conda 3、验证版本 4、配置pip源 三、conda用法 1、常用指令 一、环境说明 1、测试环境为ubuntu24.04.1 2、更…...

智能工厂规划学习——深入解读数字化工厂规划与建设方案
项目总体思路聚焦于通过智能制造和数字化工厂建设,来优化企业战略并提升信息化水平。首先,企业需学习先进国家已经验证的先进经验,并紧跟其正在变革的方向,以确保自身发展的前瞻性和竞争力。 在企业战略层面,企业正从以产品为中心的业务模式,逐步转变为以服务中心…...

【学习笔记】深入理解Java虚拟机学习笔记——第2章 Java内存区域与内存溢出异常
第2章 Java内存区域与内存溢出异常 2.1 概述 略 2.2 运行时数据区域 2.2.1 程序计数器 线程私有,记录执行的字节码位置 2.2.2 Java 虚拟机栈 线程私有,存储一个一个的栈帧,通过栈帧的出入栈来控制方法执行。 -栈帧:对应一个…...

Python全流程开发实战:基于IMAP协议安全下载个人Gmail邮箱内所有PDF附件
在日常办公场景中,面对成百上千封携带PDF附件的邮件,手动逐一下载往往耗时耗力,成为效率瓶颈。如何通过代码实现“一键批量下载”?本文将以**“Gmail全量PDF附件下载工具”**开发为例,完整拆解从需求分析到落地交付的P…...

【验证技能】VIP项目大总结
VIP项目快做一段落了,历时一年半,也该要一个大汇总。 VIP简介 VIP开发流程 VIP难点 进程同步 打拍插入不同bit位宽数据问题。 动态升降lane VIP做的不好的地方和改进想法 各层之间交互 testsuite两端关键 所有层的实现架构不统一 VIP经验 ** 架构…...
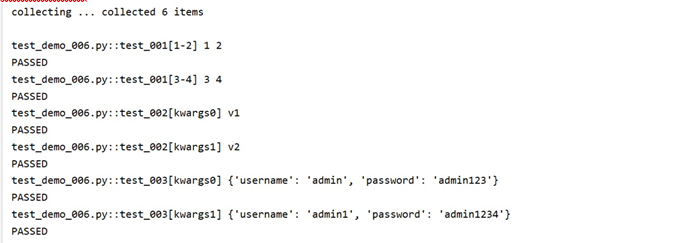
Pytest-mark使用详解(跳过、标记、参数 化)
1.前言 在工作中我们经常使用pytest.mark.XXXX进行装饰器修饰,后面的XXX的不同,在pytest中有不同的作 用,其整体使用相对复杂,我们单独将其抽取出来做详细的讲解。 2.pytest.mark.skip()/skipif()跳过用例 import pytest #无条…...

【浅尝Java】Java简介第一个Java程序(含JDK、JRE与JVM关系、javcdoc的使用)
🍞自我激励:每天努力一点点,技术变化看得见 文章目录 Java语言概述Java是什么Java语言的重要性Java语言发展简史Java语言特性 第一个Java程序main方法示例运行Java程序JDK、JRE、JVM之间的关系注释基本规则注释规范 标识符关键字 Java语言概述…...

游戏打击感实现
视觉表现 1.帧冻结(卡肉) 原理:在攻击命中的瞬间暂停动画播放(通常0.1-0.3s),伯尼真实打击时的反作用力停滞感。实现:通过控制动画播放速度(如Unity的Animator.speed)结…...

项目三 - 任务2:创建笔记本电脑类(一爹多叔)
在本次实战中,我们通过Java的单根继承和多接口实现特性,设计了一个笔记本电脑类。首先创建了Computer抽象类,提供计算的抽象方法,模拟电脑的基本功能。接着定义了NetCard和USB两个接口,分别包含连接网络和USB设备的抽象…...
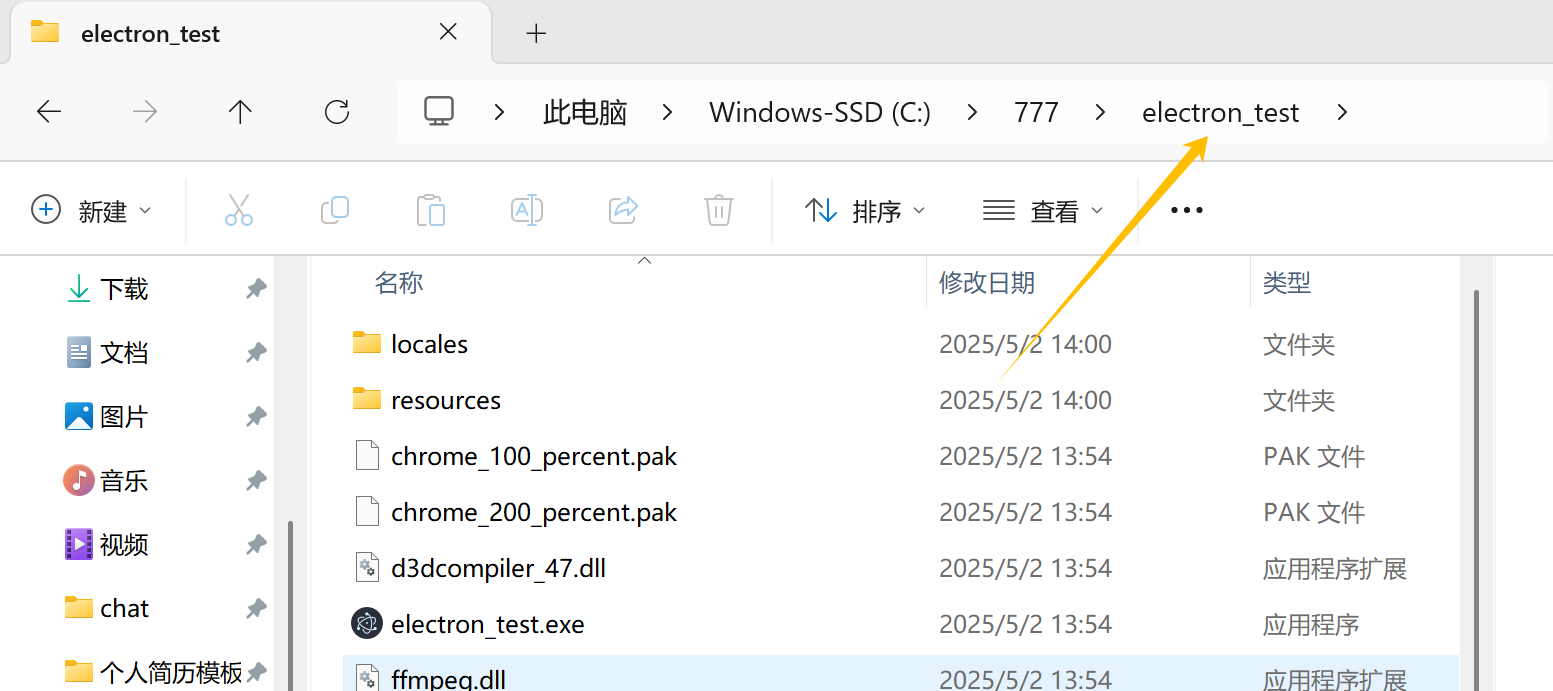
Electron学习+打包
1. 什么是 Electron? Electron 是⼀个 跨平台桌⾯应⽤ 开发框架,开发者可以使⽤:HTML、CSS、JavaScript 等 Web 技术来构建桌⾯应⽤程序,它的本质是结合了 Chromium 和 Node.js ,现在⼴泛⽤于桌⾯应 ⽤程序开发&a…...
NumPy线性代数功能全解析:矩阵运算与方程求解实用指南
NumPy 是线性代数领域中高效的工具。它可以帮助完成矩阵运算和方程求解。本文将介绍 NumPy 中用于线性代数的常用函数。 矩阵乘法 矩阵乘法会根据两个矩阵生成一个新矩阵。具体做法是将第一个矩阵的每一行与第二个矩阵的每一列相乘,并将乘积相加,得到新…...
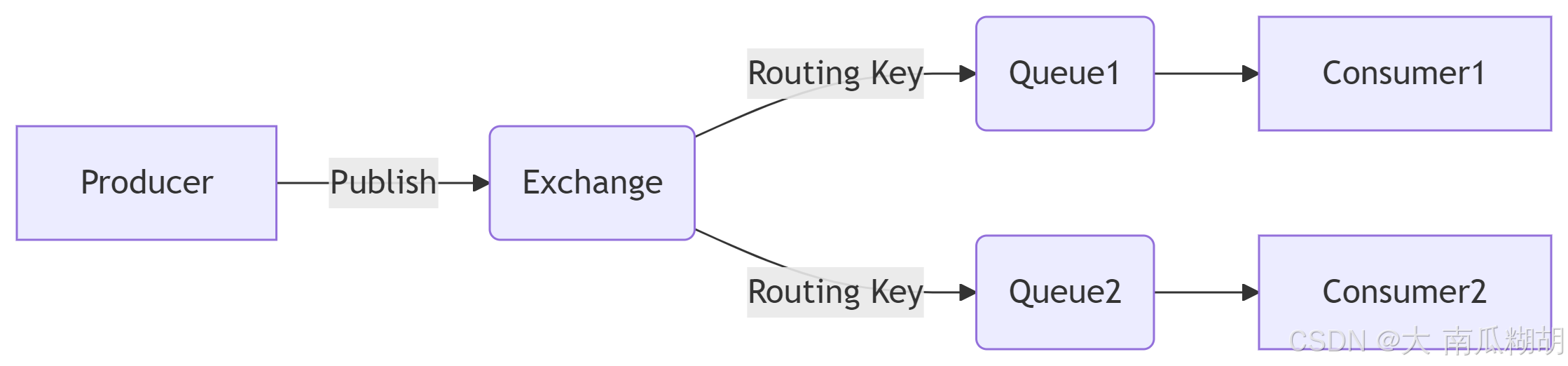
《RabbitMQ 全面解析:从原理到实战的高性能消息队列指南》
一、RabbitMQ 核心原理与架构 1. 核心组件与工作流程 RabbitMQ 基于 AMQP 协议,核心组件包括 生产者(Producer)、交换机(Exchange)、队列(Queue) 和 消费者(Consumer)。…...

jenkins slave节点打包报错Failed to create a temp file on
jenkins slave节点打包报错 一、报错信息 FATAL: Unable to produce a script file Also: hudson.remoting.Channel$CallSiteStackTrace: Remote call to slave-83at hudson.remoting.Channel.attachCallSiteStackTrace(Channel.java:1784)at hudson.remoting.UserRequest$…...

计算机视觉——通过 OWL-ViT 实现开放词汇对象检测
介绍 传统的对象检测模型大多是封闭词汇类型,只能识别有限的固定类别。增加新的类别需要大量的注释数据。然而,现实世界中的物体类别几乎无穷无尽,这就需要能够检测未知类别的开放式词汇类型。对比学习(Contrastive Learning)使用成对的图像和语言数据,在这一挑战中备受…...
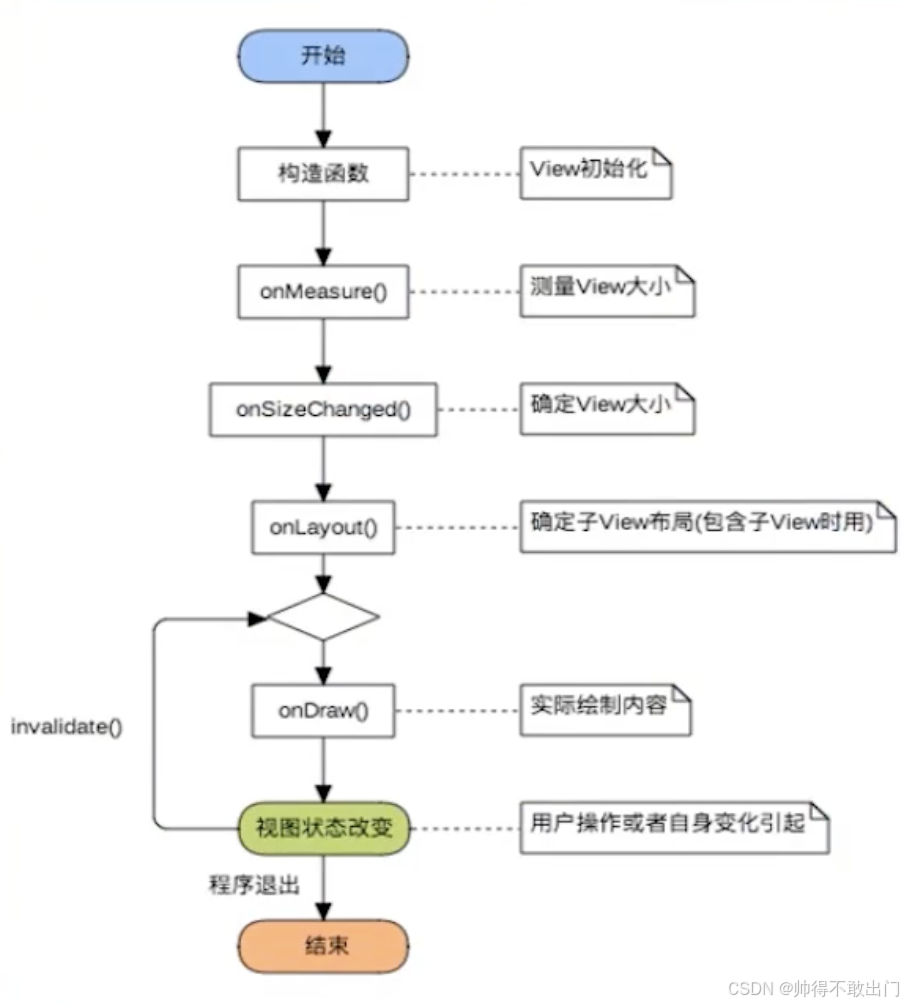
Android Framework学习二:Activity创建及View绘制流程
文章目录 Window绘制流程Window Manager Service(WMS)SurfaceSurfaceFlinger 安卓View层次结构ActivityPhoneWindowActivity与PhoneWindow两者之间的关系ViewRootImplDecorViewDecorView 的作用DecorView 的结构总结 Activity创建流程View invalidate调用…...