【IP101】图像特征提取技术:从传统方法到深度学习的完整指南
🌟 特征提取魔法指南
🎨 在图像处理的世界里,特征提取就像是寻找图像的"指纹",让我们能够识别和理解图像的独特性。让我们一起来探索这些神奇的特征提取术吧!
📚 目录
- 基础概念 - 特征的"体检"
- Harris角点 - 图像的"关节"
- SIFT特征 - 图像的"全身体检"
- SURF特征 - 图像的"快速体检"
- ORB特征 - 图像的"经济体检"
- 特征匹配 - 图像的"认亲"
- 性能优化 - "体检"的加速器
- 实战应用 - "体检"的实践
1. 什么是特征提取?
特征提取就像是给图像做"体检",主要目的是:
- 🔍 发现图像中的关键信息
- 🎯 提取有意义的特征
- 🛠️ 降低数据维度
- 📊 提高识别效率
常见的特征包括:
- 角点特征(图像的"关节")
- SIFT特征(图像的"指纹")
- SURF特征(图像的"快速指纹")
- ORB特征(图像的"经济指纹")
2. Harris角点检测
2.1 基本原理
角点检测就像是寻找图像中的"关节",这些点通常具有以下特点:
- 在两个方向上都有明显变化
- 对旋转和光照变化不敏感
- 具有局部唯一性
数学表达式:
Harris角点检测的响应函数:
R = det ( M ) − k ⋅ trace ( M ) 2 R = \det(M) - k \cdot \text{trace}(M)^2 R=det(M)−k⋅trace(M)2
其中:
- M M M 是自相关矩阵
- k k k 是经验常数(通常取0.04-0.06)
- det ( M ) \det(M) det(M) 是矩阵的行列式
- trace ( M ) \text{trace}(M) trace(M) 是矩阵的迹
2.2 手动实现
C++实现
void harris_corner_detection(const Mat& src, Mat& dst,double k = 0.04, int blockSize = 3) {CV_Assert(!src.empty() && src.channels() == 1);// 计算梯度Mat dx, dy;Sobel(src, dx, CV_32F, 1, 0, 3);Sobel(src, dy, CV_32F, 0, 1, 3);// 计算自相关矩阵的元素Mat dx2 = dx.mul(dx);Mat dy2 = dy.mul(dy);Mat dxdy = dx.mul(dy);// 计算响应函数dst.create(src.size(), CV_32F);for (int y = 0; y < src.rows; y++) {for (int x = 0; x < src.cols; x++) {float a = 0, b = 0, c = 0;for (int i = -blockSize/2; i <= blockSize/2; i++) {for (int j = -blockSize/2; j <= blockSize/2; j++) {int ny = y + i;int nx = x + j;if (ny >= 0 && ny < src.rows && nx >= 0 && nx < src.cols) {a += dx2.at<float>(ny, nx);b += dxdy.at<float>(ny, nx);c += dy2.at<float>(ny, nx);}}}float det = a * c - b * b;float trace = a + c;dst.at<float>(y, x) = det - k * trace * trace;}}
}
Python实现
def harris_corner_detection_manual(image, k=0.04, block_size=3):"""手动实现Harris角点检测参数:image: 输入灰度图像k: Harris角点检测参数block_size: 邻域大小"""if len(image.shape) == 3:gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)else:gray = image.copy()// 计算梯度dx = cv2.Sobel(gray, cv2.CV_32F, 1, 0, ksize=3)dy = cv2.Sobel(gray, cv2.CV_32F, 0, 1, ksize=3)// 计算自相关矩阵的元素dx2 = dx * dxdy2 = dy * dydxdy = dx * dy// 计算响应函数height, width = gray.shaperesponse = np.zeros((height, width), dtype=np.float32)offset = block_size // 2for y in range(offset, height - offset):for x in range(offset, width - offset):// 计算局部窗口内的自相关矩阵a = np.sum(dx2[y-offset:y+offset+1, x-offset:x+offset+1])b = np.sum(dxdy[y-offset:y+offset+1, x-offset:x+offset+1])c = np.sum(dy2[y-offset:y+offset+1, x-offset:x+offset+1])// 计算响应值det = a * c - b * btrace = a + cresponse[y, x] = det - k * trace * tracereturn response
3. SIFT特征
3.1 基本原理
SIFT(Scale-Invariant Feature Transform)就像是图像的"全身体检",不管图像怎么变化(旋转、缩放),都能找到稳定的特征点。
主要步骤:
-
尺度空间构建(多角度检查):
L ( x , y , σ ) = G ( x , y , σ ) ∗ I ( x , y ) L(x,y,\sigma) = G(x,y,\sigma) * I(x,y) L(x,y,σ)=G(x,y,σ)∗I(x,y)
其中:- G ( x , y , σ ) G(x,y,\sigma) G(x,y,σ) 是高斯核
- I ( x , y ) I(x,y) I(x,y) 是输入图像
- σ \sigma σ 是尺度参数
-
关键点定位(找到重点):
D ( x , y , σ ) = L ( x , y , k σ ) − L ( x , y , σ ) D(x,y,\sigma) = L(x,y,k\sigma) - L(x,y,\sigma) D(x,y,σ)=L(x,y,kσ)−L(x,y,σ) -
方向分配(确定朝向):
- 计算梯度方向直方图
- 选择主方向
3.2 手动实现
C++实现
void sift_features(const Mat& src, vector<KeyPoint>& keypoints,Mat& descriptors, int nfeatures = 0) {CV_Assert(!src.empty());// 构建高斯金字塔vector<Mat> gaussian_pyramid;buildGaussianPyramid(src, gaussian_pyramid, 4);// 构建DOG金字塔vector<Mat> dog_pyramid;buildDoGPyramid(gaussian_pyramid, dog_pyramid);// 检测关键点detectKeypoints(dog_pyramid, keypoints);// 计算描述子computeDescriptors(gaussian_pyramid, keypoints, descriptors);
}void buildGaussianPyramid(const Mat& src, vector<Mat>& pyramid, int nOctaves) {pyramid.clear();Mat current = src.clone();for (int i = 0; i < nOctaves; i++) {// 存储当前八度的图像pyramid.push_back(current);// 下采样Mat down;pyrDown(current, down);current = down;}
}void buildDoGPyramid(const vector<Mat>& gaussian_pyramid,vector<Mat>& dog_pyramid) {dog_pyramid.clear();for (size_t i = 0; i < gaussian_pyramid.size() - 1; i++) {Mat dog;subtract(gaussian_pyramid[i + 1], gaussian_pyramid[i], dog);dog_pyramid.push_back(dog);}
}void detectKeypoints(const vector<Mat>& dog_pyramid,vector<KeyPoint>& keypoints) {keypoints.clear();for (size_t i = 1; i < dog_pyramid.size() - 1; i++) {const Mat& prev = dog_pyramid[i - 1];const Mat& curr = dog_pyramid[i];const Mat& next = dog_pyramid[i + 1];for (int y = 1; y < curr.rows - 1; y++) {for (int x = 1; x < curr.cols - 1; x++) {// 检查当前点是否为极值点float val = curr.at<float>(y, x);bool is_max = true;bool is_min = true;// 检查3x3x3邻域for (int dy = -1; dy <= 1 && (is_max || is_min); dy++) {for (int dx = -1; dx <= 1 && (is_max || is_min); dx++) {// 检查相邻层if (val <= prev.at<float>(y + dy, x + dx)) is_max = false;if (val >= prev.at<float>(y + dy, x + dx)) is_min = false;if (val <= next.at<float>(y + dy, x + dx)) is_max = false;if (val >= next.at<float>(y + dy, x + dx)) is_min = false;// 检查当前层if (dx != 0 || dy != 0) {if (val <= curr.at<float>(y + dy, x + dx)) is_max = false;if (val >= curr.at<float>(y + dy, x + dx)) is_min = false;}}}if (is_max || is_min) {KeyPoint kp(x, y, 1.6 * pow(2, i/3.0));keypoints.push_back(kp);}}}}
}void computeDescriptors(const vector<Mat>& gaussian_pyramid,const vector<KeyPoint>& keypoints,Mat& descriptors) {descriptors.create(keypoints.size(), 128, CV_32F);for (size_t i = 0; i < keypoints.size(); i++) {const KeyPoint& kp = keypoints[i];float* desc = descriptors.ptr<float>(i);// 计算梯度方向直方图Mat mag, angle;const Mat& img = gaussian_pyramid[kp.octave];Sobel(img, mag, CV_32F, 1, 0);Sobel(img, angle, CV_32F, 0, 1);// 计算描述子for (int y = -4; y < 4; y++) {for (int x = -4; x < 4; x++) {int px = kp.pt.x + x;int py = kp.pt.y + y;if (px >= 0 && px < img.cols && py >= 0 && py < img.rows) {float m = mag.at<float>(py, px);float a = angle.at<float>(py, px);// 将梯度方向量化为8个方向int bin = (int)(a * 8 / (2 * CV_PI)) % 8;desc[bin] += m;}}}// 归一化描述子float norm = 0;for (int j = 0; j < 128; j++) {norm += desc[j] * desc[j];}norm = sqrt(norm);for (int j = 0; j < 128; j++) {desc[j] /= norm;}}
}
Python实现
def sift_features_manual(image, n_features=0):"""手动实现SIFT特征提取参数:image: 输入图像n_features: 期望的特征点数量,0表示不限制"""if len(image.shape) == 3:gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)else:gray = image.copy()# 构建高斯金字塔gaussian_pyramid = build_gaussian_pyramid(gray, n_octaves=4)# 构建DOG金字塔dog_pyramid = build_dog_pyramid(gaussian_pyramid)# 检测关键点keypoints = detect_keypoints(dog_pyramid)# 计算描述子descriptors = compute_descriptors(gaussian_pyramid, keypoints)return keypoints, descriptorsdef build_gaussian_pyramid(image, n_octaves):"""构建高斯金字塔"""pyramid = []current = image.copy()for i in range(n_octaves):pyramid.append(current)current = cv2.pyrDown(current)return pyramiddef build_dog_pyramid(gaussian_pyramid):"""构建DOG金字塔"""dog_pyramid = []for i in range(len(gaussian_pyramid) - 1):dog = cv2.subtract(gaussian_pyramid[i + 1], gaussian_pyramid[i])dog_pyramid.append(dog)return dog_pyramiddef detect_keypoints(dog_pyramid):"""检测关键点"""keypoints = []for i in range(1, len(dog_pyramid) - 1):prev = dog_pyramid[i - 1]curr = dog_pyramid[i]next = dog_pyramid[i + 1]for y in range(1, curr.shape[0] - 1):for x in range(1, curr.shape[1] - 1):val = curr[y, x]is_max = Trueis_min = True# 检查3x3x3邻域for dy in range(-1, 2):for dx in range(-1, 2):# 检查相邻层if val <= prev[y + dy, x + dx]: is_max = Falseif val >= prev[y + dy, x + dx]: is_min = Falseif val <= next[y + dy, x + dx]: is_max = Falseif val >= next[y + dy, x + dx]: is_min = False# 检查当前层if dx != 0 or dy != 0:if val <= curr[y + dy, x + dx]: is_max = Falseif val >= curr[y + dy, x + dx]: is_min = Falseif is_max or is_min:kp = cv2.KeyPoint(x, y, 1.6 * (2 ** (i/3.0)))keypoints.append(kp)return keypointsdef compute_descriptors(gaussian_pyramid, keypoints):"""计算描述子"""descriptors = np.zeros((len(keypoints), 128), dtype=np.float32)for i, kp in enumerate(keypoints):img = gaussian_pyramid[kp.octave]desc = descriptors[i]# 计算梯度mag, angle = cv2.cartToPolar(cv2.Sobel(img, cv2.CV_32F, 1, 0),cv2.Sobel(img, cv2.CV_32F, 0, 1))# 计算描述子for y in range(-4, 4):for x in range(-4, 4):px = int(kp.pt[0] + x)py = int(kp.pt[1] + y)if 0 <= px < img.shape[1] and 0 <= py < img.shape[0]:m = mag.at<float>(py, px)a = angle.at<float>(py, px)# 将梯度方向量化为8个方向bin = int(a * 8 / (2 * np.pi)) % 8desc[bin] += m# 归一化描述子norm = np.linalg.norm(desc)if norm > 0:desc /= normreturn descriptors
4. SURF特征
4.1 基本原理
SURF(Speeded-Up Robust Features)就像是SIFT的"快速体检版",用积分图像和盒子滤波器加速计算。
核心思想:
H ( x , y ) = D x x ( x , y ) D y y ( x , y ) − ( D x y ( x , y ) ) 2 H(x,y) = D_{xx}(x,y)D_{yy}(x,y) - (D_{xy}(x,y))^2 H(x,y)=Dxx(x,y)Dyy(x,y)−(Dxy(x,y))2
其中:
- D x x D_{xx} Dxx 是x方向二阶导
- D y y D_{yy} Dyy 是y方向二阶导
- D x y D_{xy} Dxy 是xy方向二阶导
4.2 手动实现
C++实现
void surf_features(const Mat& src, vector<KeyPoint>& keypoints,Mat& descriptors, int nfeatures = 0) {CV_Assert(!src.empty());// 计算积分图Mat integral;integral(src, integral, CV_32F);// 使用Hessian矩阵检测特征点detectSurfFeatures(integral, keypoints);// 计算描述子computeSurfDescriptors(integral, keypoints, descriptors);
}void detectSurfFeatures(const Mat& integral, vector<KeyPoint>& keypoints) {keypoints.clear();// 使用不同尺度的Hessian矩阵检测特征点vector<float> scales = {1.2f, 1.6f, 2.0f, 2.4f, 2.8f};for (float scale : scales) {int size = (int)(scale * 9);if (size % 2 == 0) size++;// 计算Hessian矩阵的行列式Mat det = Mat::zeros(integral.rows, integral.cols, CV_32F);for (int y = size/2; y < integral.rows - size/2; y++) {for (int x = size/2; x < integral.cols - size/2; x++) {// 计算Dxx, Dyy, Dxyfloat dxx = calculateHessian(integral, x, y, size, 0);float dyy = calculateHessian(integral, x, y, size, 1);float dxy = calculateHessian(integral, x, y, size, 2);// 计算Hessian行列式float hessian = dxx * dyy - 0.81f * dxy * dxy;if (hessian > 0) {det.at<float>(y, x) = hessian;}}}// 非极大值抑制for (int y = size/2 + 1; y < det.rows - size/2 - 1; y++) {for (int x = size/2 + 1; x < det.cols - size/2 - 1; x++) {float val = det.at<float>(y, x);if (val > 0) {bool is_max = true;for (int dy = -1; dy <= 1 && is_max; dy++) {for (int dx = -1; dx <= 1 && is_max; dx++) {if (dx == 0 && dy == 0) continue;if (val <= det.at<float>(y + dy, x + dx)) {is_max = false;}}}if (is_max) {KeyPoint kp(x, y, size);keypoints.push_back(kp);}}}}}
}float calculateHessian(const Mat& integral, int x, int y, int size, int type) {int half = size / 2;float response = 0;switch (type) {case 0: // Dxxresponse = boxFilter(integral, x - half, y - half, size, half) -2 * boxFilter(integral, x - half/2, y - half, half, half) +boxFilter(integral, x, y - half, size, half);break;case 1: // Dyyresponse = boxFilter(integral, x - half, y - half, size, size) -2 * boxFilter(integral, x - half, y - half/2, size, half) +boxFilter(integral, x - half, y, size, size);break;case 2: // Dxyresponse = boxFilter(integral, x - half, y - half, size, size) +boxFilter(integral, x, y, size, size) -boxFilter(integral, x - half, y, size, size) -boxFilter(integral, x, y - half, size, size);break;}return response;
}float boxFilter(const Mat& integral, int x, int y, int width, int height) {int x1 = max(0, x);int y1 = max(0, y);int x2 = min(integral.cols - 1, x + width - 1);int y2 = min(integral.rows - 1, y + height - 1);return integral.at<float>(y2, x2) -integral.at<float>(y2, x1) -integral.at<float>(y1, x2) +integral.at<float>(y1, x1);
}void computeSurfDescriptors(const Mat& integral,const vector<KeyPoint>& keypoints,Mat& descriptors) {descriptors.create(keypoints.size(), 64, CV_32F);for (size_t i = 0; i < keypoints.size(); i++) {const KeyPoint& kp = keypoints[i];float* desc = descriptors.ptr<float>(i);// 计算主方向float angle = computeOrientation(integral, kp);// 计算描述子for (int y = -2; y < 2; y++) {for (int x = -2; x < 2; x++) {float dx = 0, dy = 0, abs_dx = 0, abs_dy = 0;// 计算4x4子区域内的Haar小波响应for (int sy = 0; sy < 5; sy++) {for (int sx = 0; sx < 5; sx++) {int px = kp.pt.x + x * 5 + sx;int py = kp.pt.y + y * 5 + sy;if (px >= 0 && px < integral.cols && py >= 0 && py < integral.rows) {float haar_x = haarWavelet(integral, px, py, 2, 0);float haar_y = haarWavelet(integral, px, py, 2, 1);// 旋转到主方向float rot_x = haar_x * cos(angle) + haar_y * sin(angle);float rot_y = -haar_x * sin(angle) + haar_y * cos(angle);dx += rot_x;dy += rot_y;abs_dx += abs(rot_x);abs_dy += abs(rot_y);}}}// 存储描述子int idx = (y + 2) * 16 + (x + 2) * 4;desc[idx] = dx;desc[idx + 1] = dy;desc[idx + 2] = abs_dx;desc[idx + 3] = abs_dy;}}// 归一化描述子float norm = 0;for (int j = 0; j < 64; j++) {norm += desc[j] * desc[j];}norm = sqrt(norm);for (int j = 0; j < 64; j++) {desc[j] /= norm;}}
}float computeOrientation(const Mat& integral, const KeyPoint& kp) {float angle = 0;float max_response = 0;// 在60度扇形区域内搜索主方向for (float theta = 0; theta < 2 * CV_PI; theta += 0.1f) {float response = 0;for (int r = 6; r < 20; r += 2) {int x = kp.pt.x + r * cos(theta);int y = kp.pt.y + r * sin(theta);if (x >= 0 && x < integral.cols && y >= 0 && y < integral.rows) {response += haarWavelet(integral, x, y, 4, 0) +haarWavelet(integral, x, y, 4, 1);}}if (response > max_response) {max_response = response;angle = theta;}}return angle;
}float haarWavelet(const Mat& integral, int x, int y, int size, int type) {float response = 0;switch (type) {case 0: // x方向response = boxFilter(integral, x + size/2, y - size/2, size/2, size) -boxFilter(integral, x - size/2, y - size/2, size/2, size);break;case 1: // y方向response = boxFilter(integral, x - size/2, y + size/2, size, size/2) -boxFilter(integral, x - size/2, y - size/2, size, size/2);break;}return response;
}
Python实现
def surf_features_manual(image, n_features=0):"""手动实现SURF特征提取参数:image: 输入图像n_features: 期望的特征点数量,0表示不限制"""if len(image.shape) == 3:gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)else:gray = image.copy()# 计算积分图integral = cv2.integral(gray.astype(np.float32))# 检测特征点keypoints = detect_surf_features(integral)# 计算描述子descriptors = compute_surf_descriptors(integral, keypoints)return keypoints, descriptorsdef detect_surf_features(integral):"""检测SURF特征点"""keypoints = []# 使用不同尺度的Hessian矩阵检测特征点scales = [1.2, 1.6, 2.0, 2.4, 2.8]for scale in scales:size = int(scale * 9)if size % 2 == 0:size += 1# 计算Hessian矩阵的行列式det = np.zeros((integral.shape[0], integral.shape[1]), dtype=np.float32)for y in range(size//2, integral.shape[0] - size//2):for x in range(size//2, integral.shape[1] - size//2):# 计算Dxx, Dyy, Dxydxx = calculate_hessian(integral, x, y, size, 0)dyy = calculate_hessian(integral, x, y, size, 1)dxy = calculate_hessian(integral, x, y, size, 2)# 计算Hessian行列式hessian = dxx * dyy - 0.81 * dxy * dxyif hessian > 0:det[y, x] = hessian# 非极大值抑制for y in range(size//2 + 1, det.shape[0] - size//2 - 1):for x in range(size//2 + 1, det.shape[1] - size//2 - 1):val = det[y, x]if val > 0:is_max = Truefor dy in range(-1, 2):for dx in range(-1, 2):if dx == 0 and dy == 0:continueif val <= det[y + dy, x + dx]:is_max = Falsebreakif not is_max:breakif is_max:kp = cv2.KeyPoint(x, y, size)keypoints.append(kp)return keypointsdef calculate_hessian(integral, x, y, size, type):"""计算Hessian矩阵的元素"""half = size // 2response = 0if type == 0: # Dxxresponse = box_filter(integral, x - half, y - half, size, half) - \2 * box_filter(integral, x - half//2, y - half, half, half) + \box_filter(integral, x, y - half, size, half)elif type == 1: # Dyyresponse = box_filter(integral, x - half, y - half, size, size) - \2 * box_filter(integral, x - half, y - half//2, size, half) + \box_filter(integral, x - half, y, size, size)else: # Dxyresponse = box_filter(integral, x - half, y - half, size, size) + \box_filter(integral, x, y, size, size) - \box_filter(integral, x - half, y, size, size) - \box_filter(integral, x, y - half, size, size)return responsedef box_filter(integral, x, y, width, height):"""计算积分图上的盒式滤波"""x1 = max(0, x)y1 = max(0, y)x2 = min(integral.shape[1] - 1, x + width - 1)y2 = min(integral.shape[0] - 1, y + height - 1)return integral[y2, x2] - integral[y2, x1] - integral[y1, x2] + integral[y1, x1]def compute_surf_descriptors(integral, keypoints):"""计算SURF描述子"""descriptors = np.zeros((len(keypoints), 64), dtype=np.float32)for i, kp in enumerate(keypoints):desc = descriptors[i]# 计算主方向angle = compute_orientation(integral, kp)# 计算描述子for y in range(-2, 2):for x in range(-2, 2):dx = dy = abs_dx = abs_dy = 0# 计算4x4子区域内的Haar小波响应for sy in range(5):for sx in range(5):px = int(kp.pt[0] + x * 5 + sx)py = int(kp.pt[1] + y * 5 + sy)if 0 <= px < integral.shape[1] and 0 <= py < integral.shape[0]:haar_x = haar_wavelet(integral, px, py, 2, 0)haar_y = haar_wavelet(integral, px, py, 2, 1)# 旋转到主方向rot_x = haar_x * np.cos(angle) + haar_y * np.sin(angle)rot_y = -haar_x * np.sin(angle) + haar_y * np.cos(angle)dx += rot_xdy += rot_yabs_dx += abs(rot_x)abs_dy += abs(rot_y)# 存储描述子idx = (y + 2) * 16 + (x + 2) * 4desc[idx:idx+4] = [dx, dy, abs_dx, abs_dy]# 归一化描述子norm = np.linalg.norm(desc)if norm > 0:desc /= normreturn descriptorsdef compute_orientation(integral, kp):"""计算特征点的主方向"""angle = 0max_response = 0# 在60度扇形区域内搜索主方向for theta in np.arange(0, 2 * np.pi, 0.1):response = 0for r in range(6, 20, 2):x = int(kp.pt[0] + r * np.cos(theta))y = int(kp.pt[1] + r * np.sin(theta))if 0 <= x < integral.shape[1] and 0 <= y < integral.shape[0]:response += haar_wavelet(integral, x, y, 4, 0) + \haar_wavelet(integral, x, y, 4, 1)if response > max_response:max_response = responseangle = thetareturn angledef haar_wavelet(integral, x, y, size, type):"""计算Haar小波响应"""if type == 0: # x方向return box_filter(integral, x + size//2, y - size//2, size//2, size) - \box_filter(integral, x - size//2, y - size//2, size//2, size)else: # y方向return box_filter(integral, x - size//2, y + size//2, size, size//2) - \box_filter(integral, x - size//2, y - size//2, size, size//2)
5. ORB特征
5.1 基本原理
ORB(Oriented FAST and Rotated BRIEF)就像是"经济实惠型体检",速度快、效果好、还不要钱!
主要组成:
-
FAST角点检测:
- 检测像素圆周上的强度变化
- 快速筛选候选点
-
BRIEF描述子:
- 二进制描述子
- 汉明距离匹配
5.2 手动实现
C++实现
void orb_features(const Mat& src, vector<KeyPoint>& keypoints,Mat& descriptors, int nfeatures = 500) {CV_Assert(!src.empty());// FAST角点检测detectFASTFeatures(src, keypoints, nfeatures);// 计算方向computeOrientation(src, keypoints);// 计算rBRIEF描述子computeORBDescriptors(src, keypoints, descriptors);
}void detectFASTFeatures(const Mat& src, vector<KeyPoint>& keypoints,int nfeatures) {keypoints.clear();// FAST角点检测参数const int threshold = 20;const int min_arc = 9;// 检测角点for (int y = 3; y < src.rows - 3; y++) {for (int x = 3; x < src.cols - 3; x++) {uchar center = src.at<uchar>(y, x);int brighter = 0, darker = 0;// 检查圆周上的像素for (int i = 0; i < 16; i++) {int dx = fast_circle[i][0];int dy = fast_circle[i][1];uchar pixel = src.at<uchar>(y + dy, x + dx);if (pixel > center + threshold) brighter++;else if (pixel < center - threshold) darker++;}// 判断是否为角点if (brighter >= min_arc || darker >= min_arc) {keypoints.push_back(KeyPoint(x, y, 1));}}}// 如果特征点太多,选择响应最强的nfeatures个if (nfeatures > 0 && keypoints.size() > nfeatures) {// 计算角点响应值vector<pair<float, int>> responses;for (size_t i = 0; i < keypoints.size(); i++) {float response = calculateFASTResponse(src, keypoints[i]);responses.push_back(make_pair(response, i));}// 按响应值排序sort(responses.begin(), responses.end(), greater<pair<float, int>>());// 选择前nfeatures个特征点vector<KeyPoint> selected;for (int i = 0; i < nfeatures; i++) {selected.push_back(keypoints[responses[i].second]);}keypoints = selected;}
}float calculateFASTResponse(const Mat& src, const KeyPoint& kp) {float response = 0;uchar center = src.at<uchar>(kp.pt.y, kp.pt.x);// 计算与中心点的差异for (int i = 0; i < 16; i++) {int dx = fast_circle[i][0];int dy = fast_circle[i][1];uchar pixel = src.at<uchar>(kp.pt.y + dy, kp.pt.x + dx);response += abs(pixel - center);}return response;
}void computeOrientation(const Mat& src, vector<KeyPoint>& keypoints) {for (size_t i = 0; i < keypoints.size(); i++) {KeyPoint& kp = keypoints[i];float m01 = 0, m10 = 0;// 计算质心for (int y = -7; y <= 7; y++) {for (int x = -7; x <= 7; x++) {if (x*x + y*y <= 49) { // 圆形区域int px = kp.pt.x + x;int py = kp.pt.y + y;if (px >= 0 && px < src.cols && py >= 0 && py < src.rows) {float intensity = src.at<uchar>(py, px);m10 += x * intensity;m01 += y * intensity;}}}}// 计算方向kp.angle = atan2(m01, m10) * 180 / CV_PI;if (kp.angle < 0) kp.angle += 360;}
}void computeORBDescriptors(const Mat& src,const vector<KeyPoint>& keypoints,Mat& descriptors) {descriptors.create(keypoints.size(), 32, CV_8U);for (size_t i = 0; i < keypoints.size(); i++) {const KeyPoint& kp = keypoints[i];uchar* desc = descriptors.ptr<uchar>(i);// 计算描述子for (int j = 0; j < 32; j++) {int pattern[4][4] = {{0, 0, 0, 0},{0, 0, 0, 0},{0, 0, 0, 0},{0, 0, 0, 0}};// 生成随机模式for (int k = 0; k < 4; k++) {for (int l = 0; l < 4; l++) {pattern[k][l] = (rand() % 2) ? 1 : -1;}}// 计算描述子的一位float sum = 0;for (int k = 0; k < 4; k++) {for (int l = 0; l < 4; l++) {int px = kp.pt.x + k - 2;int py = kp.pt.y + l - 2;if (px >= 0 && px < src.cols && py >= 0 && py < src.rows) {sum += pattern[k][l] * src.at<uchar>(py, px);}}}desc[j] = (sum > 0) ? 1 : 0;}}
}
Python实现
def orb_features_manual(image, n_features=500):"""手动实现ORB特征提取参数:image: 输入图像n_features: 期望的特征点数量"""if len(image.shape) == 3:gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)else:gray = image.copy()# FAST角点检测keypoints = detect_fast_features(gray, n_features)# 计算方向keypoints = compute_orientation(gray, keypoints)# 计算rBRIEF描述子descriptors = compute_orb_descriptors(gray, keypoints)return keypoints, descriptorsdef detect_fast_features(image, n_features):"""检测FAST角点"""keypoints = []# FAST角点检测参数threshold = 20min_arc = 9# 检测角点for y in range(3, image.shape[0] - 3):for x in range(3, image.shape[1] - 3):center = image[y, x]brighter = darker = 0# 检查圆周上的像素for i in range(16):dx = fast_circle[i][0]dy = fast_circle[i][1]pixel = image[y + dy, x + dx]if pixel > center + threshold:brighter += 1elif pixel < center - threshold:darker += 1# 判断是否为角点if brighter >= min_arc or darker >= min_arc:keypoints.append(cv2.KeyPoint(x, y, 1))# 如果特征点太多,选择响应最强的n_features个if n_features > 0 and len(keypoints) > n_features:# 计算角点响应值responses = []for i, kp in enumerate(keypoints):response = calculate_fast_response(image, kp)responses.append((response, i))# 按响应值排序responses.sort(reverse=True)# 选择前n_features个特征点selected = []for i in range(n_features):selected.append(keypoints[responses[i][1]])keypoints = selectedreturn keypointsdef calculate_fast_response(image, kp):"""计算FAST角点响应值"""response = 0center = image[int(kp.pt[1]), int(kp.pt[0])]# 计算与中心点的差异for i in range(16):dx = fast_circle[i][0]dy = fast_circle[i][1]pixel = image[int(kp.pt[1] + dy), int(kp.pt[0] + dx)]response += abs(pixel - center)return responsedef compute_orientation(image, keypoints):"""计算特征点方向"""for kp in keypoints:m01 = m10 = 0# 计算质心for y in range(-7, 8):for x in range(-7, 8):if x*x + y*y <= 49: # 圆形区域px = int(kp.pt[0] + x)py = int(kp.pt[1] + y)if 0 <= px < image.shape[1] and 0 <= py < image.shape[0]:intensity = image[py, px]m10 += x * intensitym01 += y * intensity# 计算方向kp.angle = np.arctan2(m01, m10) * 180 / np.piif kp.angle < 0:kp.angle += 360return keypointsdef compute_orb_descriptors(image, keypoints):"""计算ORB描述子"""descriptors = np.zeros((len(keypoints), 32), dtype=np.uint8)for i, kp in enumerate(keypoints):desc = descriptors[i]# 计算描述子for j in range(32):# 生成随机模式pattern = np.random.choice([-1, 1], size=(4, 4))# 计算描述子的一位sum_val = 0for k in range(4):for l in range(4):px = int(kp.pt[0] + k - 2)py = int(kp.pt[1] + l - 2)if 0 <= px < image.shape[1] and 0 <= py < image.shape[0]:sum_val += pattern[k, l] * image[py, px]desc[j] = 1 if sum_val > 0 else 0return descriptors
6. 特征匹配
6.1 基本原理
特征匹配就像是"认亲",通过比较特征描述子来找到对应的特征点。
匹配策略:
-
暴力匹配:
- 遍历所有可能
- 计算距离最小值
-
快速近似匹配:
- 构建搜索树
- 快速查找最近邻
6.2 手动实现
C++实现
void feature_matching(const Mat& src1, const Mat& src2,vector<DMatch>& matches,const vector<KeyPoint>& keypoints1,const vector<KeyPoint>& keypoints2,const Mat& descriptors1,const Mat& descriptors2) {matches.clear();// 暴力匹配for (int i = 0; i < descriptors1.rows; i++) {double minDist = DBL_MAX;int minIdx = -1;for (int j = 0; j < descriptors2.rows; j++) {double dist = 0;// 计算欧氏距离for (int k = 0; k < descriptors1.cols; k++) {double diff = descriptors1.at<float>(i,k) -descriptors2.at<float>(j,k);dist += diff * diff;}dist = sqrt(dist);if (dist < minDist) {minDist = dist;minIdx = j;}}if (minIdx >= 0) {DMatch match;match.queryIdx = i;match.trainIdx = minIdx;match.distance = minDist;matches.push_back(match);}}
}
Python实现
def feature_matching_manual(descriptors1, descriptors2, threshold=0.7):"""手动实现特征匹配参数:descriptors1: 第一幅图像的特征描述子descriptors2: 第二幅图像的特征描述子threshold: 匹配阈值"""matches = []# 暴力匹配for i in range(len(descriptors1)):dist = np.linalg.norm(descriptors2 - descriptors1[i], axis=1)idx1, idx2 = np.argsort(dist)[:2]# 比率测试if dist[idx1] < threshold * dist[idx2]:matches.append(cv2.DMatch(i, idx1, dist[idx1]))return matches
7. 代码实现与优化
7.1 性能优化技巧
- SIMD加速:
// 使用AVX2指令集加速特征计算
inline void compute_features_simd(const float* src, float* dst, int width) {alignas(32) float buffer[8];__m256 sum = _mm256_setzero_ps();for (int x = 0; x < width; x += 8) {__m256 data = _mm256_loadu_ps(src + x);sum = _mm256_add_ps(sum, data);}_mm256_store_ps(buffer, sum);*dst = buffer[0] + buffer[1] + buffer[2] + buffer[3] +buffer[4] + buffer[5] + buffer[6] + buffer[7];
}
- OpenMP并行化:
#pragma omp parallel for collapse(2)
for (int y = 0; y < src.rows; y++) {for (int x = 0; x < src.cols; x++) {// 处理每个像素}
}
- 内存优化:
// 使用连续内存访问
Mat temp = src.clone();
temp = temp.reshape(1, src.total());
8. 实验效果与应用
8.1 应用场景
-
图像配准:
- 医学图像对齐
- 遥感图像拼接
- 全景图像合成
-
目标识别:
- 人脸识别
- 物体检测
- 场景匹配
-
运动跟踪:
- 视频监控
- 手势识别
- 增强现实
8.2 注意事项
-
特征提取过程中的注意点:
- 选择合适的特征类型
- 考虑计算效率
- 注意特征的可区分性
-
算法选择建议:
- 根据应用场景选择
- 考虑实时性要求
- 权衡准确性和效率
总结
特征提取就像是给图像做"体检"!通过Harris角点检测、SIFT、SURF、ORB等"检查项目",我们可以发现图像中隐藏的"特征"。在实际应用中,需要根据具体场景选择合适的"检查方案",就像医生为每个病人制定个性化的体检计划一样。
记住:好的特征提取就像是一个经验丰富的"医生",既要发现关键特征,又要保持效率!🏥
参考资料
- Harris C, Stephens M. A combined corner and edge detector[C]. Alvey vision conference, 1988
- Lowe D G. Distinctive image features from scale-invariant keypoints[J]. IJCV, 2004
- Bay H, et al. SURF: Speeded Up Robust Features[C]. ECCV, 2006
- Rublee E, et al. ORB: An efficient alternative to SIFT or SURF[C]. ICCV, 2011
- OpenCV官方文档: https://docs.opencv.org/
- 更多资源: IP101项目主页
相关文章:

【IP101】图像特征提取技术:从传统方法到深度学习的完整指南
🌟 特征提取魔法指南 🎨 在图像处理的世界里,特征提取就像是寻找图像的"指纹",让我们能够识别和理解图像的独特性。让我们一起来探索这些神奇的特征提取术吧! 📚 目录 基础概念 - 特征的"体…...
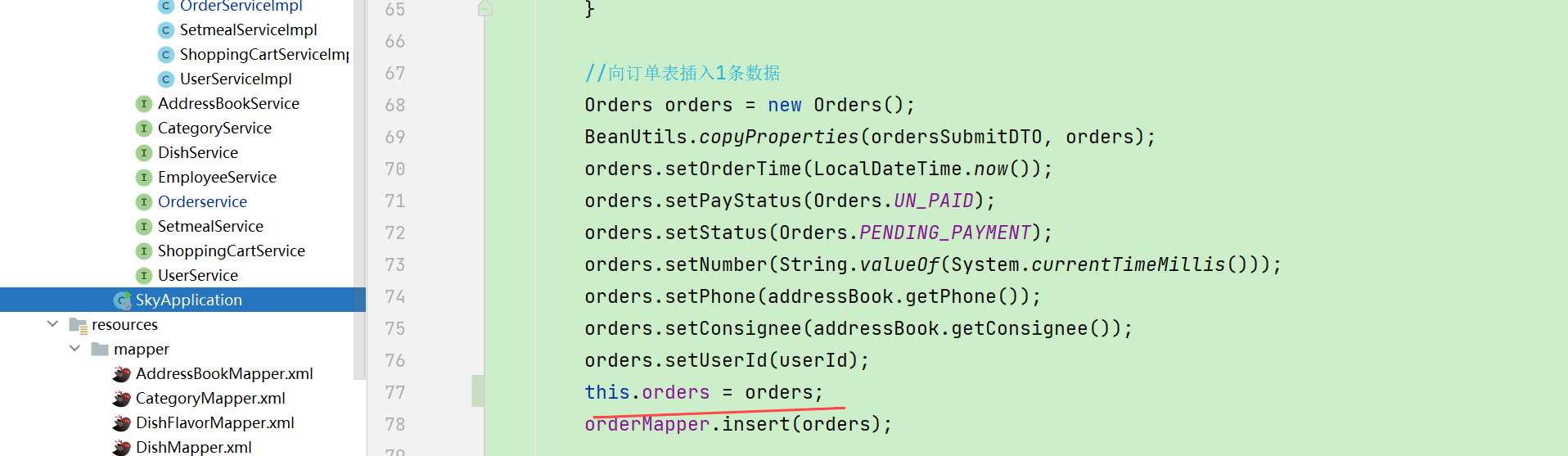
苍穹外卖(用户下单、订单支付)
用户下单、订单支付 导入地址簿功能代码 接口设计 数据库设计(address_book表) 代码导入 功能测试 用户下单 接口设计 数据库设计 订单表 orders 订单明细表 order_detail 代码开发 根据用户下单接口的参数设计DTO 根据用户下单接口的…...

数据结构-非线性结构-二叉树
概述 /** * 术语 * 根节点(root node):位于二叉树顶层的节点,没有父节点。 * 叶节点(leaf node):没有子节点的节点,其两个指针均指向 None 。 * 边(edge)&…...
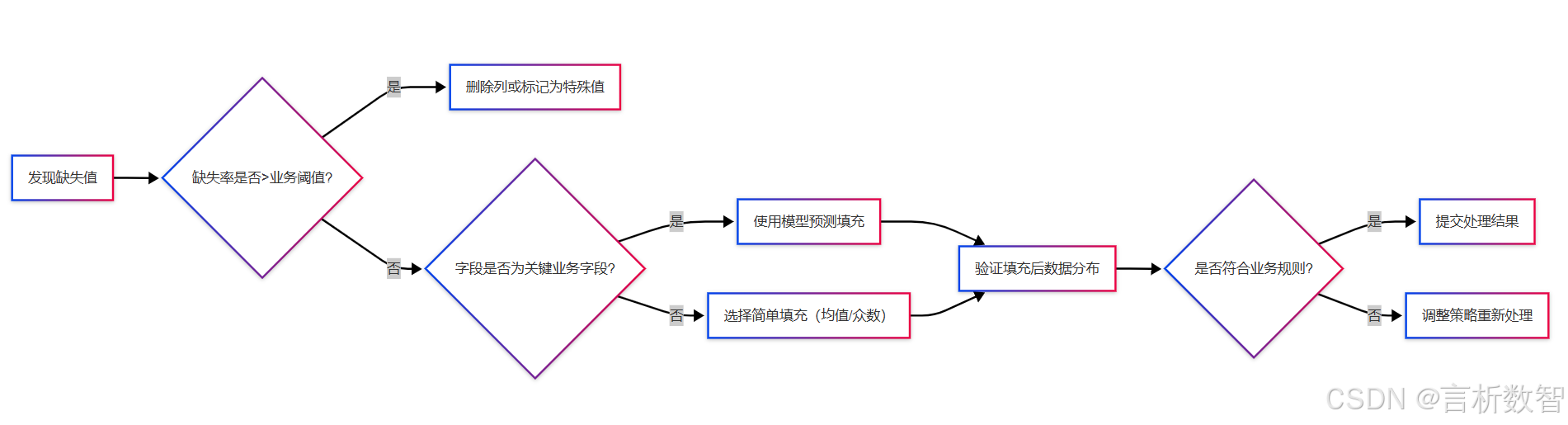
【PostgreSQL数据分析实战:从数据清洗到可视化全流程】3.2 缺失值检测与处理(NULL值填充/删除策略)
👉 点击关注不迷路 👉 点击关注不迷路 👉 点击关注不迷路 文章大纲 缺失值检测与处理全攻略:NULL值填充与删除策略实战3.2 缺失值检测与处理3.2.1 缺失值类型与业务影响3.2.1.1 缺失值的三种形态3.2.1.2 业务影响分级 3.2.2 缺失值…...

2025年渗透测试面试题总结-某步在线面试(题目+回答)
网络安全领域各种资源,学习文档,以及工具分享、前沿信息分享、POC、EXP分享。不定期分享各种好玩的项目及好用的工具,欢迎关注。 目录 一、操作系统相关问题总结与分析及扩展回答 1. Linux命令熟悉度 2. 查看进程的命令 3. 查看网络进程…...
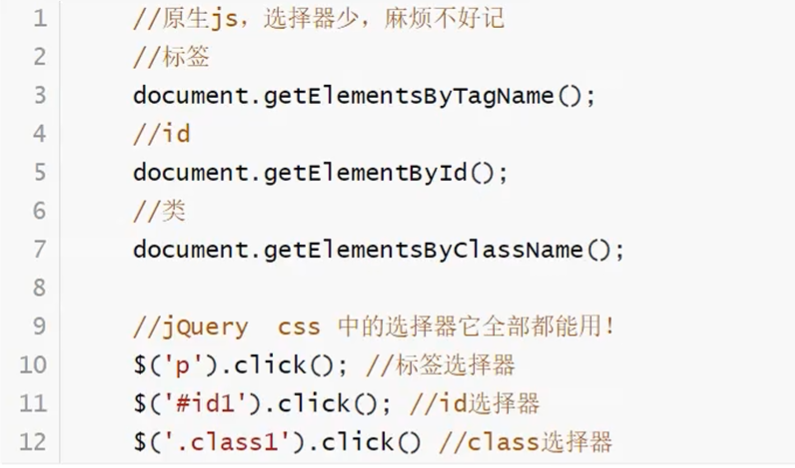
Java后端程序员学习前端之JavaScript
1.什么是JavaScript 1.1.概述 JavaScript是一门世界上最流行的脚本语言javaScript 一个合格的后端人员,必须要精通JavaScript 1.2.历史 JavaScript的起源故事-CSDN博客 2.快速入门 2.1.引入JavaScript 1.内部标签 <script>//.......</script> --…...

ARM Linux 设备树
Linux 设备驱动开发详解:基于最新的Linux 4.0内核, 机械工业出版社, 宋宝华, 2015 1. 设备树的起源 • 背景: ARM架构中大量板级代码冗余,硬编码在mach-xxx目录,设备树(Device Tree)引入结构化描述硬件。 • 目的: 减…...
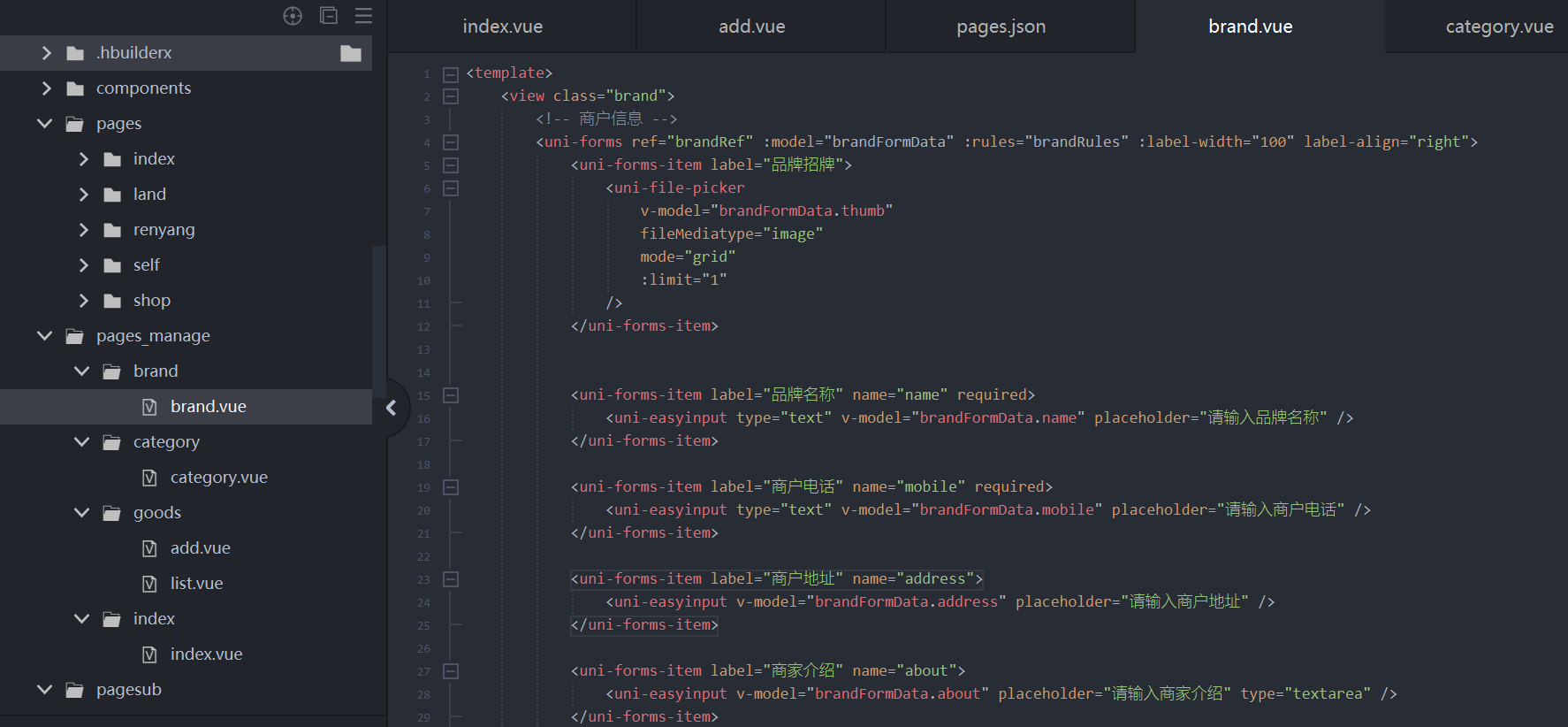
uniapp-商城-43-shop 后台管理 页面
后台管理较为简单,主要用于后台数据的管理,包含商品类别和商品信息,其实还可以扩展到管理用户等等 1、后台首页 包含 分类管理 商品管理 关于商家等几个栏目 主要代码: <template><view class"manage">…...

kotlin JvmName注解的作用和用途
1. JvmName 注解的作用 JvmName 是 Kotlin 提供的一个注解,用于在编译为 Java 字节码时自定义生成的类名或方法名。 作用对象: 文件级别(整个 .kt 文件)函数、属性、类等成员 主要用途: 控制 Kotlin 编译后生成的 JV…...

Mac 平台 字体Unicode范围分析器
字体Unicode范围分析器 #include <CoreText/CoreText.h> // CoreText框架头文件,用于字体处理 #include <CoreFoundation/CoreFoundation.h> // CoreFoundation框架头文件 #include <stdio.h> // 标准输入输出 #include…...
—软体动力学系统)
【C++游戏引擎开发】第30篇:物理引擎(Bullet)—软体动力学系统
一、软体动力学理论体系 1.1 连续体力学基础 1.1.1 变形梯度张量 物体运动可描述为映射函数: x = ϕ ( X , t ) \mathbf{x} = \phi(\mathbf{X},t) x...

vue2 结合后端预览pdf 跨域的话就得需要后端来返回 然后前端呈现
<el-button :loading"pdfIslock" v-if"isPDFFile(form.pic)" type"primary" style"margin: 15px 0" click"previewPDF(form.pic)"> 预览pdf </el-button>//npm install pdfjs-dist //如果没有就得先安装import …...
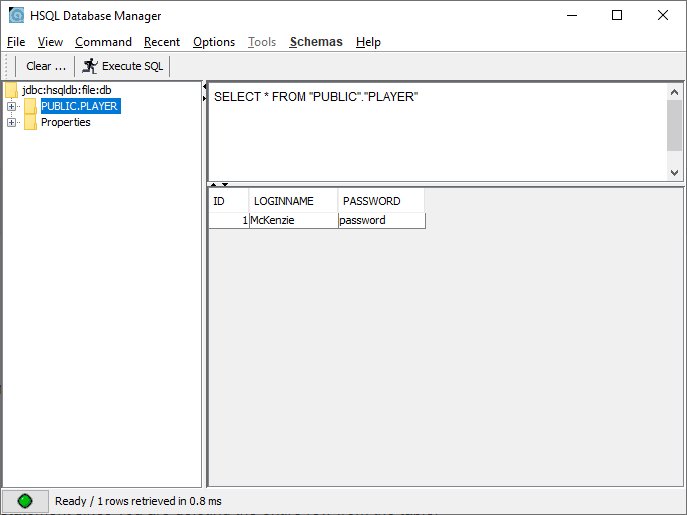
什么是 HSQLDB?
大家好,这里是架构资源栈!点击上方关注,添加“星标”,一起学习大厂前沿架构! Java开发人员学习Java数据库连接(JDBC)的最简单方法是试验HyperSQL数据库(又名HSQLDB)。 …...

AI时代企业应用系统架构的新思路与CIO变革指南
作为制造企业CIO,我们看问题需要有前瞻性,AI时代企业应用系统架构需要进行全面转型。 一、新思想与新技术 1. 核心新思想 可视化开发AI的融合模式:不再只依赖纯代码开发或传统低代码,而是两者结合,通过AI理解自然语…...

多语言爬虫实现网站价格监控
最近突发奇想想用多种代码来爬取数据做价格监控。常见的比如Python、JavaScript(Node.js)、或者Go?不过通常来说,Python应该是首选,因为它的库比较丰富,比如requests和BeautifulSoup,或者Scrapy。不过客户要求多种代码…...

如何修改 JAR 包中的源码
如何修改 JAR 包中的源码 前言一、准备工作二、将 JAR 当作 ZIP 打开并提取三、重写 Java 类方法 A:直接替换已编译的 .class方法 B:运行时类路径优先加载 四、修改 MyBatis(或其他)XML 资源五、重新打包 JAR(命令行&a…...
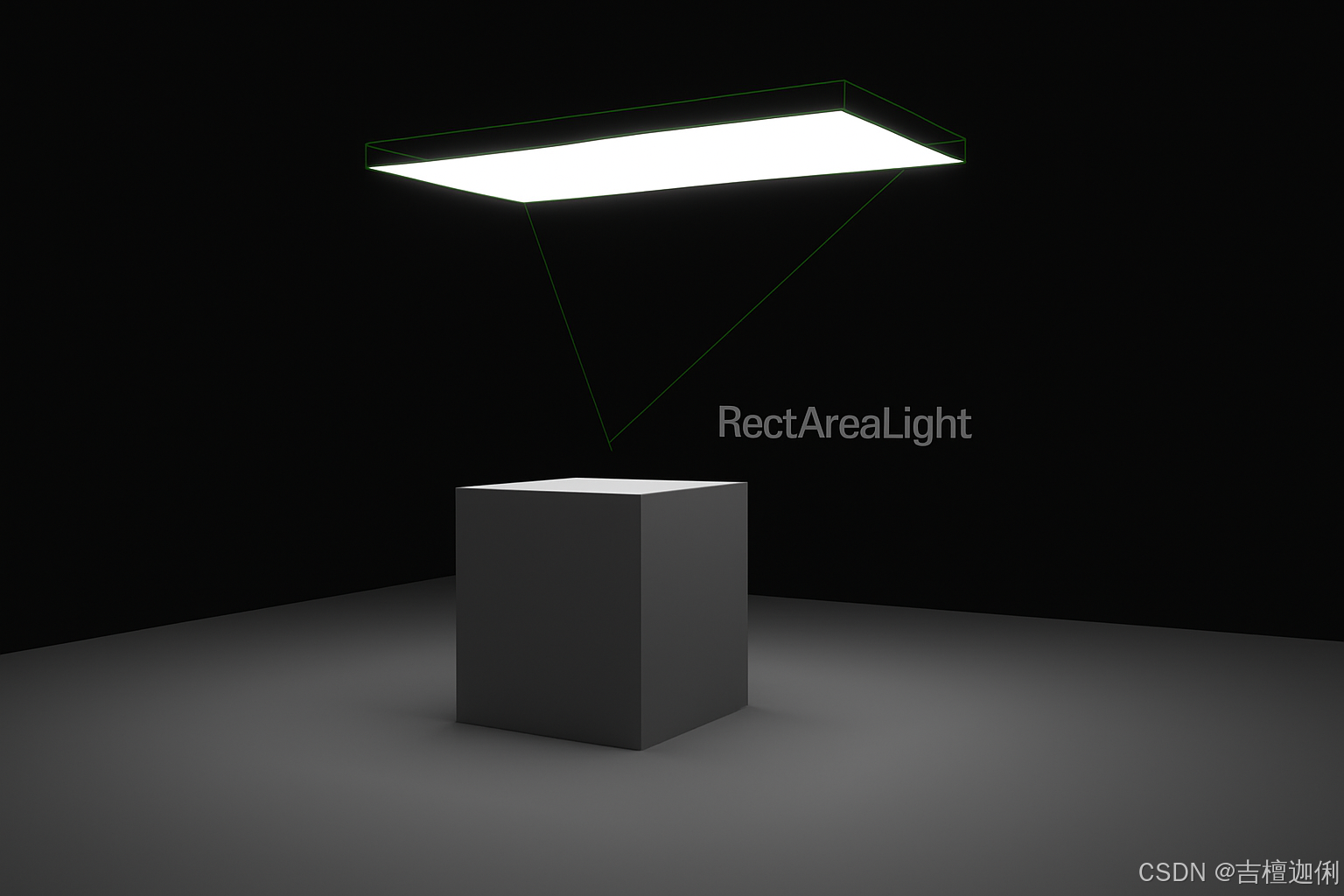
16.Three.js 中的 RectAreaLight 全面详解 + Vue 3 实战案例
😎 本文将带你从零了解 THREE.RectAreaLight 的工作原理、使用方式、注意事项,并在最后用 Vue 3 的 Composition API 封装一个完整的光源演示组件,一站式搞懂矩形区域光的魅力 💡! 🖼️ 一、展示图效果示意…...

excel 批量导出图片并指定命名
一、开发环境 打开excel文件中的宏编辑器和JS代码调试 工具-》开发工具-》WPS宏编辑器 左边是工程区,当打开多个excel时会有多个,要注意不要把代码写到其他工作簿去了 右边是代码区 二、编写代码 宏是js语言,因此变量或者方法可以网上搜…...

PyTorch_创建01张量
torch.ones 和 torch.ones_like 创建全1张量torch.zeros 和 torch.zeros_like 创建全0张量torch.full 和 torch.full_like 创建全为指定值张量 上面的函数里有 like 表示根据另外一个张量的形状创建全0或者全1的或者全为指定值的张量。 代码 import torch …...

神经网络之互动练习详解:从基础到拟合非线性数据
神经网络之互动练习详解:从基础到拟合非线性数据 在机器学习的世界里,神经网络是一种强大而神奇的工具,它可以帮助我们解决各种复杂的问题。今天,我们就通过一个有趣的互动练习,来深入了解神经网络的工作原理以及如何…...
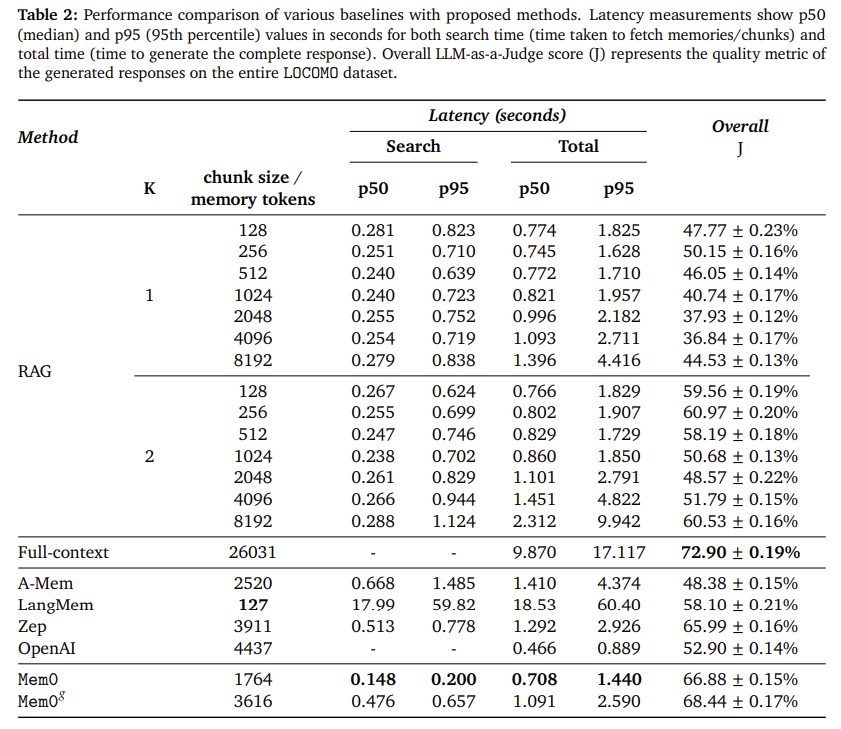
Mem0.ai研究团队开发的全新记忆架构系统“Mem0”正式发布
每周跟踪AI热点新闻动向和震撼发展 想要探索生成式人工智能的前沿进展吗?订阅我们的简报,深入解析最新的技术突破、实际应用案例和未来的趋势。与全球数同行一同,从行业内部的深度分析和实用指南中受益。不要错过这个机会,成为AI领…...

海外社交软件技术深潜:实时互动系统与边缘计算的极限优化
一、毫秒级延迟之战:下一代实时通信架构 1.1 全球实时消息投递体系设计 图表 代码 性能基准测试(跨大西洋传输): 协议/算法组合 平均延迟 99分位延迟 丢包恢复率 WebSocketTLSBBRv2 142ms 298ms 78% QUIC自定义CC 112ms 201ms 92%…...

通过DeepSeek大语言模型控制panda机械臂,听懂人话,拟人性回答。智能机械臂助手又进一步啦
文章目录 前言环境配置运行测试报错 前言 通过使用智能化的工作流控制系统来精确操控机械臂,不仅能够基于预设算法可靠地规划每个动作步骤的执行顺序和力度,确保作业流程的标准化和可重复性,还能通过模块化的程序设计思路灵活地在原有工作流中…...
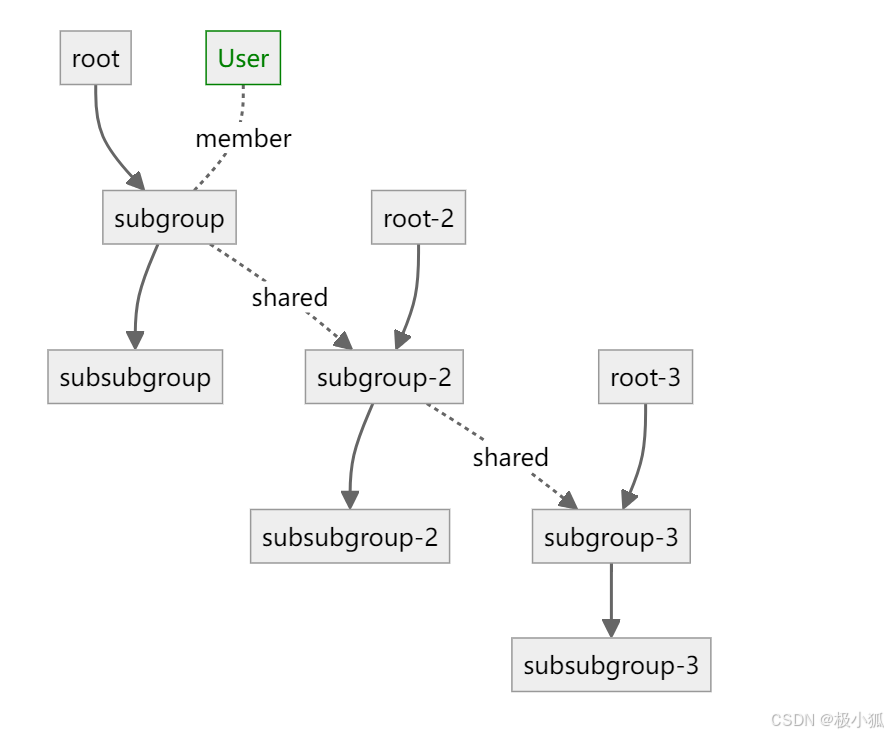
如何添加或删除极狐GitLab 项目成员?
极狐GitLab 是 GitLab 在中国的发行版,关于中文参考文档和资料有: 极狐GitLab 中文文档极狐GitLab 中文论坛极狐GitLab 官网 项目成员 (BASIC ALL) 成员是有权访问您的项目的用户和群组。 每个成员都有一个角色,这决定了他们在项目中可以…...
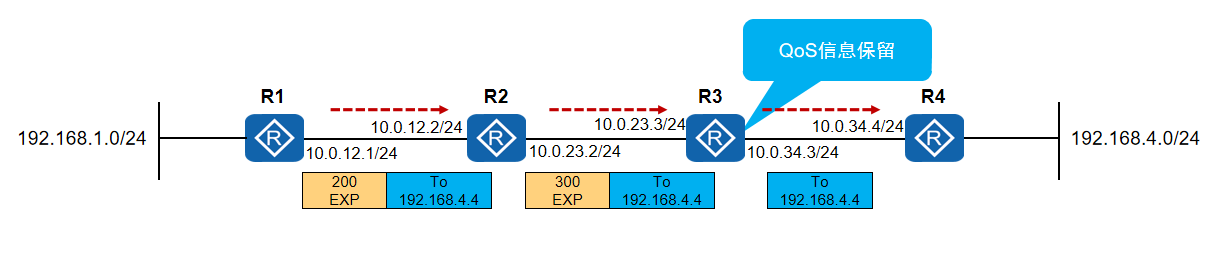
计算机网络-LDP标签发布与管理
前面学习了LDP建立邻居,建立会话,今天来学习在MPLS中的标签发布与管理。 在MPLS网络中,下游LSR决定标签和FEC的绑定关系,并将这种绑定关系发布给上游LSR。LDP通过发送标签请求和标签映射消息,在LDP对等体之间通告FEC和…...

云境天合水陆安全漏电监测仪—迅速确定是否存在漏电现象
云境天合水陆安全漏电监测仪是一种专为水下及潮湿环境设计的电气安全检测设备,通过高灵敏度电磁传感器探测漏电电流产生的交变磁场,基于法拉第电磁感应定律,自动区分高灵敏度信号和低灵敏度信号,精准定位泄漏电源的具体位置。一旦…...
软考 系统架构设计师系列知识点之杂项集萃(54)
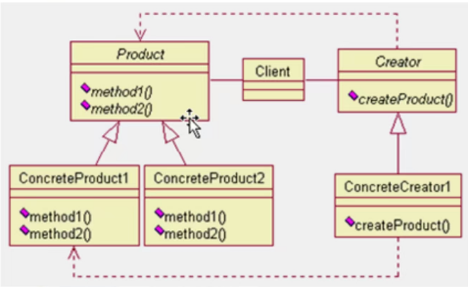
接前一篇文章:软考 系统架构设计师系列知识点之杂项集萃(53) 第87题 某银行系统采用Factory Method方法描述其不同账户之间的关系,设计出的类图如下所示。其中与Factory Method的“Creator”角色对应的类是(ÿ…...
Nginx +Nginx-http-flv-module 推流拉流
这两天为了利用云服务器实现 Nginx 进行OBS Rtmp推流,Flv拉流时发生了诸多情况,记录实现过程。 环境 OS:阿里云CentOS 7.9 64位Nginx:nginx-1.28.0Nginx-http-flv-module:nginx-http-flv-module-1.2.12 安装Nginx编…...
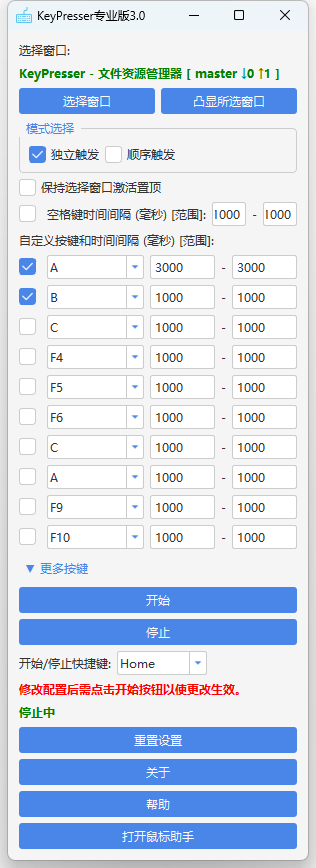
KeyPresser 一款自动化按键工具
1. 简介 KeyPresser 是一款自动化按键工具,它可以与窗口交互,并支持后台运行, 无需保持被控窗口在前台运行。用户可以选择要操作的目标窗口,并通过勾选复选框来控制要发送哪些按键消息。可以从组合框中选择所需的按键,并在编辑框中输入时间间隔以控制按键发送之间的延迟。程…...
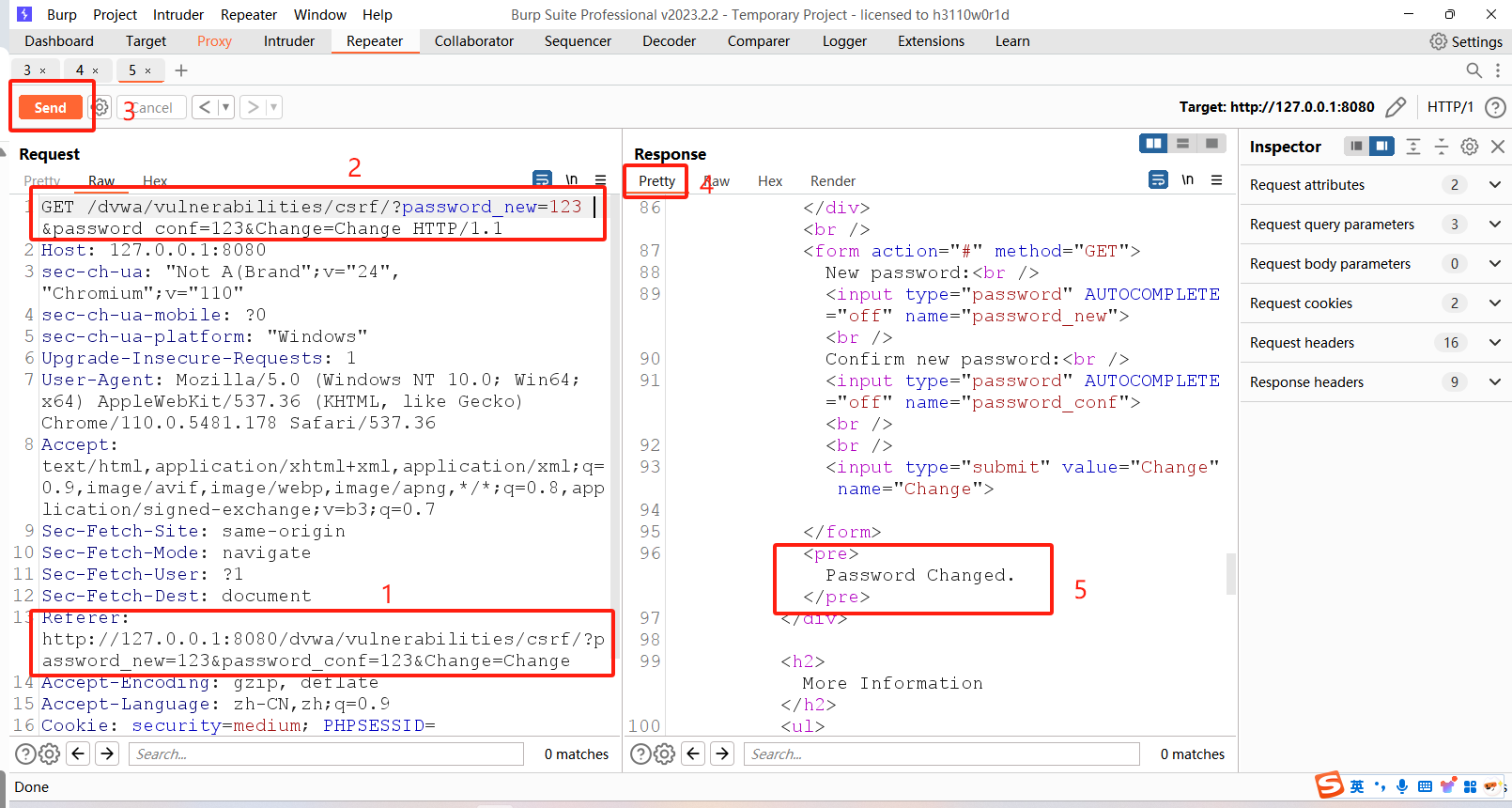
DVWA靶场保姆级通关教程--03CSRF跨站请求伪造
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 目录 文章目录 前言 一、low级别的源码分析 二、medium级别源码分析 安全性分析 增加了一层 Referer 验证: 关键点是:在真实的网络环境中&a…...