技术视界 | 青龙机器人训练地形详解(一):如何创建一个地形
机器人强化学习中的地形训练是利用强化学习算法让机器人在不同地形环境中通过试错学习最优行为策略的过程,通过环境建模、策略学习与优化等环节,使机器人能够自主适应复杂多变的地形,提高其移动效率、稳定性和自主性,减少人为干预,从而在实际应用中更好地应对各种复杂场景,提升机器人在复杂环境中的性能和可靠性。

什么是地形?
在人形机器人行走的强化学习研究中,"地形"被定义为机器人运动过程中足端与外界环境发生力学交互的接触界面及其物理属性组合。该概念涵盖几何形态特征(如曲率、高程差)、材料特性(摩擦系数、弹性模量)以及动态环境参数(移动平台速度、表面形变速率)等多维度要素。
地形复杂度主要由表面几何不规则度、接触面材料异质性和环境动态扰动强度三个核心指标构成,这些要素的协同作用对机器人的运动学模型适应性、动力学控制鲁棒性以及能量优化效率形成了复合挑战。
在青龙机器人的强化学习训练框架中,使用了楼梯地形,波浪地形,斜坡地形,垫脚石地形等。
为什么需要地形?
在强化学习框架下,地形多样性作为环境参数空间的关键维度和训练模型的重要因素,对人形机器人运动策略的泛化能力培养具有显著的促进作用。
通过构建包含随机扰动、动态变化和非结构化特征的训练地形集合,机器人在策略优化过程中可逐步习得适应复杂物理交互的通用运动模式。这种多模态地形训练机制能够有效提升机器人运动系统的鲁棒性,具体表现在三个维度:首先,在动态平衡控制方面,不同摩擦系数和地形起伏特征促使策略网络学习更精细的质心调节机制;其次,在环境感知与响应层面,异质性地貌特征驱动感知模块建立更完备的动力学特征编码能力;最后,在能耗优化维度,多样化地形约束引导策略网络发展出适应不同能耗场景的步态切换策略。
不同地形的设计和使用可以帮助研究人员测试和改进机器人在各种环境下的表现,从而开发出更智能和可靠的行走算法。
如何创建地形?
上面介绍了强化学习中“地形”的概念,下面以具体案例向大家讲解如何创建一个地形。
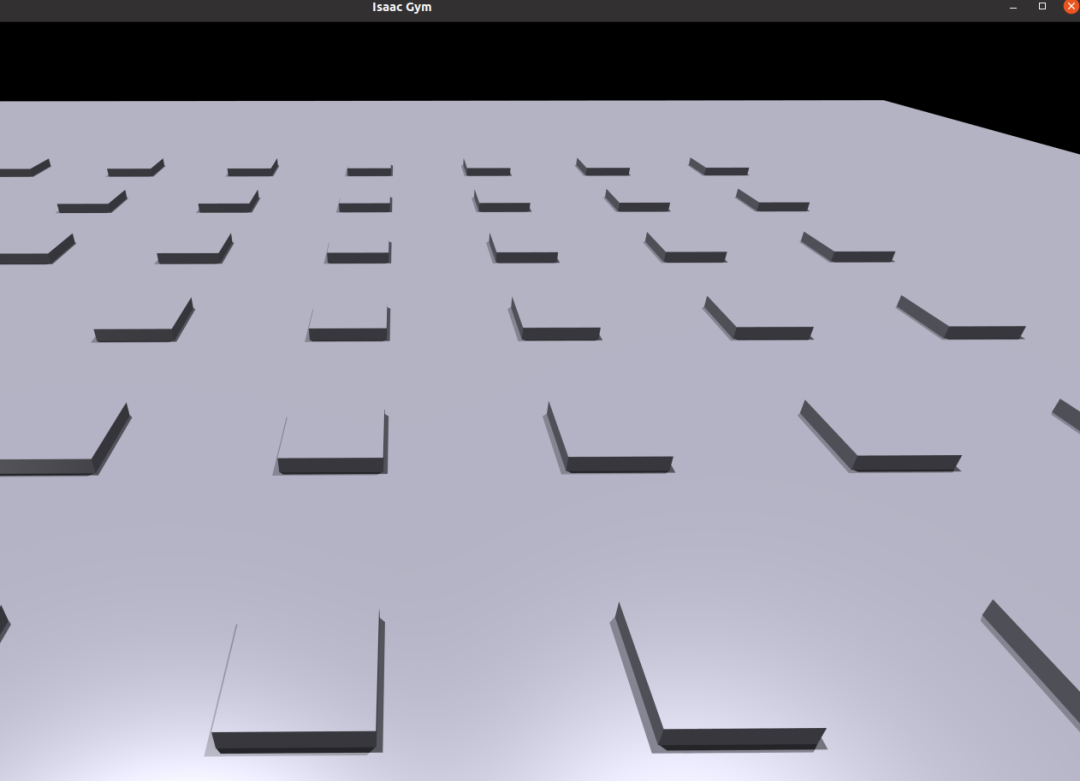
def jump_plat_terrain(terrain, height, platform_size=1.):
height = int(height / terrain.vertical_scale)
platform_size = int(platform_size / terrain.horizontal_scale / 2)
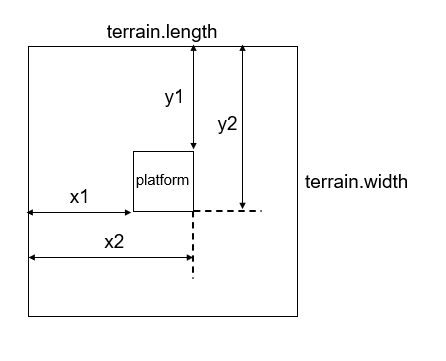
x1 = terrain.length // 2 - platform_size
x2 = terrain.length // 2 + platform_size
y1 = terrain.width // 2 - platform_size
y2 = terrain.width // 2 + platform_size
terrain.height_field_raw[x1:x2, y1:y2] = height 这是一个 AzureLoong/gpugym/utils 路径下的 terrain.py 文件中的一个函数,它被用以创建一个凸起的平台,其中平台高度为 height,平台大小为 platform_size。
在人形机器人强化学习领域,Terrain 类通常用于定义和管理训练或测试环境中的地形参数,其核心目标是通过多样化的地形模拟,提升机器人的运动适应性和策略泛化能力。Terrain 类的定义也在此文件中,结构比较简单,在这里就不做详细解释了。Terrain 类中最重要的一个参数就是 height_field_raw,它的定义语句是
self.height_field_raw = np.zeros((self.tot_rows , self.tot_cols), dtype=np.int16)它具体的作用是,以坐标形式表现地形中某处位置的高度。
所以 terrain.height_field_raw[x1:x2, y1:y2] = height 的意思就是在 x1 到 x2,y1 到 y2 区域创建高度为height的地形。
另外的,因为 height_field_raw 以数组形式存储高度数据,所以 x1,x2,y1,y2 都需要是整数。另一个值得注意的问题是 x1,x2,y1,y2 相比于 platform_size 都乘上了一个 horizontal_scale 参数,而高度 height 则乘上了一个 vertical_scale 参数,这是为了以后方便对所有的地形做统一调整而添加的参数。
上文中给出了如何创建一个凸起的跳台 jump_plat 的函数,通过修改上文中的代码语句的最后一行则能让它创建一个下凹的 jump_pit
terrain.height_field_raw[x1:x2, y1:y2] = -height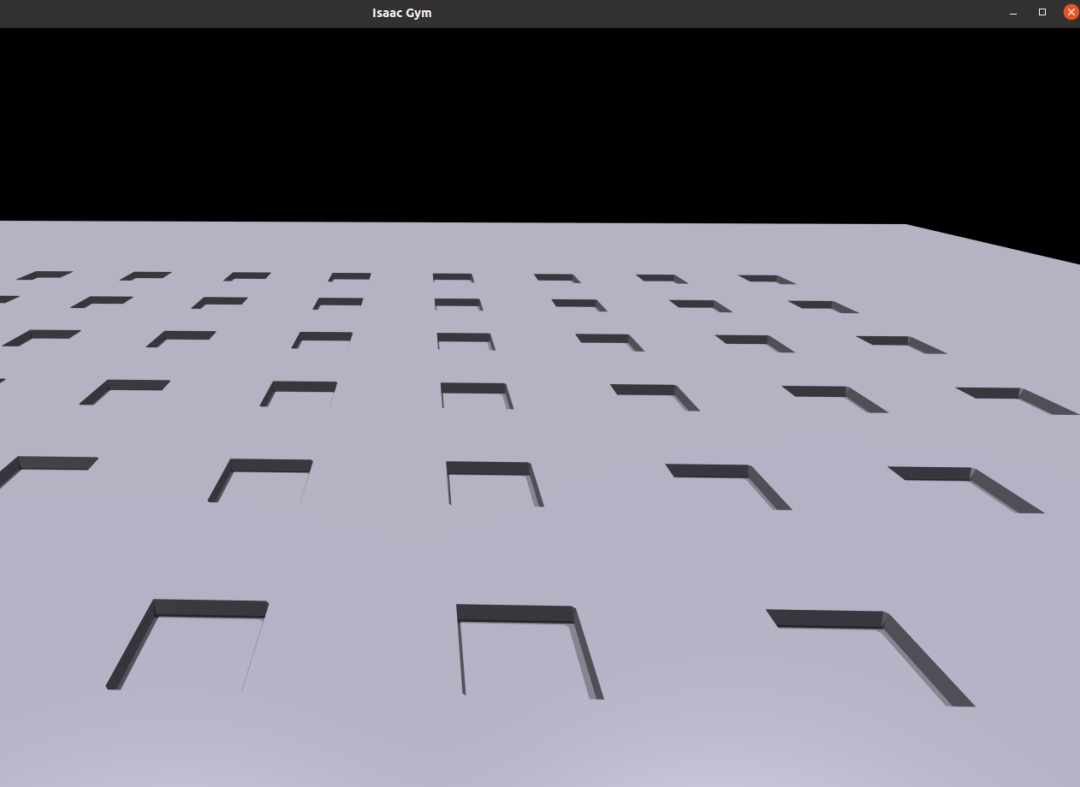
本篇文章探讨了如何创建一个地形以及一些基础原理,但如何在实际场景中高效应用呢?下一篇文章将揭秘如何添加地形到训练环境,提供更多的实践演练操作!
"OpenLoong" 是全球领先的人形机器人开源社区,秉承技术驱动与开放透明的价值观,致力于汇聚全球开发者推动人形机器人产业发展。由国家地方共建人形机器人创新中心发起的 OpenLoong 项目,是业内首个全栈、全尺寸的开源人形机器人项目,有着人人都可以打造属于自己的机器人的美好愿景,旨在推动人形机器人全场景应用、助力具身智能时代的到来。
欢迎加入 OpenLoong 开源社区,探索人形机器人技术,共享创新成果,在这里一起见证开源的力量!
相关文章:
技术视界 | 青龙机器人训练地形详解(一):如何创建一个地形
机器人强化学习中的地形训练是利用强化学习算法让机器人在不同地形环境中通过试错学习最优行为策略的过程,通过环境建模、策略学习与优化等环节,使机器人能够自主适应复杂多变的地形,提高其移动效率、稳定性和自主性,减少人为干预…...

网络安全系列--《文章1:网络安全基础与核心概念》
课程1:网络安全基础与核心概念 学习内容 1. 网络安全定义 网络安全是通过技术、管理及法律手段保护网络系统的硬件、软件及数据,使其免受破坏、篡改或泄露,确保系统稳定运行并提供可靠服务。其核心目标包括保密性、完整性、可用性、可控性及…...

2025-05-04 Unity 网络基础6——TCP心跳消息
文章目录 1 Disconnect 方法2 心跳消息 在客户端主动退出时,我们会调用 socket 的 ShutDown() 和 Close() 方法,但调用这两个方法后,服务器端无法得知客户端已经主动断开。 本文主要介绍在网络通信中,如何服务端如何判断客…...
word导出pdf带有目录导航栏-error记
1、打开word文档——>点击"视图"选项卡——>勾选"导航窗格" 2、点击"文件"——>导出——>创建PDF/XPS 3、点击"选项"——>勾选"创建书签时使用(C)" "标题(H)" 4、点击"确定"——>点击…...
1. 视频基础知识
1. 图像基础概念 像素:像素是一个图片的基本单位,pix是英语单词picture,加上英语单词“元素element”,就得到了pixel,简称px。所以“像素”有“图像元素”之意。分辨率:指的是图像的大小或者尺寸。比如 19…...

VTK 数据结构和算法类介绍
基本数据结构类 vtkPolyData 描述: 表示多边形几何结构 主要属性: Points: vtkPoints对象,存储顶点坐标 Verts: vtkCellArray对象,存储顶点数据 Lines: vtkCellArray对象,存储线数据 Polys: vtkCellArray对象,存储多边形数据 Strips: vtkCellArray对象,存储三角带数据 常…...

云计算的基础概论
一、云计算基础概念 1. 云计算定义 • 英文:Cloud Computing • 定义:通过互联网(Internet)按需提供可扩展的计算资源(如服务器、存储、数据库、网络、软件等),用户无需管理底层基础设施。 …...
HarmonyOS-hdc远程网络方式连接设备
hdc工具使用手册 1 hdc简介 hdc(OpenHarmony Device Connector)是为开发人员提供的用于设备连接调试的命令行工具,pc端开发机使用命令行工具hdc,该工具需支持部署在Windows/Linux/Mac等系统上与OpenHarmony设备(或模…...

【计算机网络网络层深度解析】从IP协议到路由优化
目录 前言技术背景与价值当前技术痛点解决方案概述目标读者说明 一、技术原理剖析核心概念图解核心作用讲解关键技术模块说明技术选型对比 二、实战演示环境配置要求核心实验实现实验1:IPv6地址配置实验2:OSPF路由配置实验3:NAT转换验证 运行…...

不同OS版本中的同一yum源yum list差异排查思路
问题描述: qemu-guest-agent二进制rpm包的yum仓库源和yum源仓库配置文件path_to_yum_conf, 通过yum list --available -c path_to_yum_conf 查询时,不同的OS版本出现了不同的结果 anolis-8无法识别 centos8可以识别 说明: 1 测试…...

奥威BI:AI+BI深度融合,重塑智能AI数据分析新标杆
在数字化浪潮席卷全球的今天,企业正面临着前所未有的数据挑战与机遇。如何高效、精准地挖掘数据价值,已成为推动业务增长、提升竞争力的核心议题。奥威BI,作为智能AI数据分析领域的领军者,凭借其创新的AIBI融合模式,正…...

第三节第一部分:Static修饰类变量、成员变量
总结 案例 要求 代码: User类: package com.day1_static;public class User {public static int num;public User() {User.num;} }Test类: package com.day1_static;public class Test {public static void main(String[] args) {User us…...

高级架构软考之网络OSI网络模型
高级架构软考之网络: 1.OSI网络模型: a.物理层: a.物理传输介质物理连接,负责数据传输,并监控数据 b.传输单位:bit c.协议: d:对应设备:中继器、集线器 b.数据链路层: a.…...

Kubernetes(k8s)学习笔记(六)--KubeSphere前置环境安装
1、安装 helm(master 节点执行) Helm 是 Kubernetes 的包管理器。包管理器类似于我们在 Ubuntu 中使用的apt、Centos 中使用的 yum 或者 Python 中的 pip 一样,能快速查找、下载和安装软件包。Helm由客户端组件 helm 和服务端组件 Tiller 组…...

PyTorch_张量元素类型转换
tensor.type([张量类型])torch.double() 代码 import torch import numpy as np # 使用 type() 函数进行转换 def test01():data torch.full([2,3], 10)print(data.dtype)# 注意:返回一个新的类型转换过的张量data data.type(torch.DoubleTensor)#data data.ty…...

架构思维:构建高并发读服务_异构数据的同步一致性方案
文章目录 一、引言二、全景架构回顾三、潜在问题问题1:Binlog 延迟——理想 vs 实际问题2:Binlog 格式解析问题3:高可靠消费1. 串行 ACK 消费2. 并行消费+乱序风险3. 解决方案 问题4:缓存数据结构设计1. Key–Value 冗…...

剑指大规模 AI 可观测,阿里云 Prometheus 2.0 应运而生
作者:曾庆国(悦达) Prometheus 大家应该非常熟悉,正文开始前,让我们一起来回顾开源 Prometheus 项目的发展史。Prometheus 最初由 SoundCloud 的工程师 Bjrn Rabehl 和 Julius Volz 于 2012 年开发。当时,…...

游戏引擎学习第260天:在性能分析器中实现钻取功能
昨天那个帧内存满之后触发段错误实在没找到什么原因导致的 继续研究一下为什么导致的 内存不够进来释放frame 释放frame 应该会给DebugState->FirstFreeStoredEvent 赋值吧 这段宏定义: #define FREELIST_DEALLOCATE(Pointer, FreeListPointer) \if(Pointer) {…...
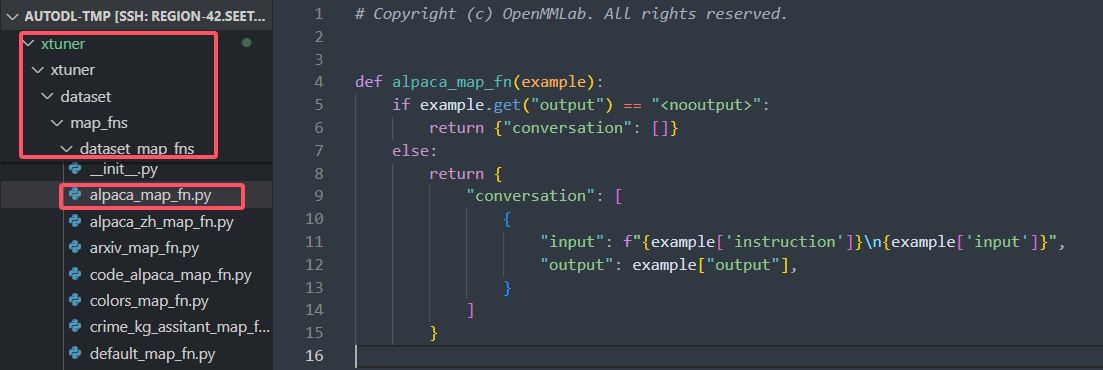
【自然语言处理与大模型】使用Xtuner进行QLoRA微调实操
本文首先对Xtuner这一微调框架进行简单的介绍。手把手演示如何使用Xtuner对模型进行微调训练,包括数据准备、训练命令执行及训练过程中的监控技巧。最后,在完成微调之后,本文还将介绍如何对微调结果进行简单对话测试。 一、Xtuner微调框架 X…...
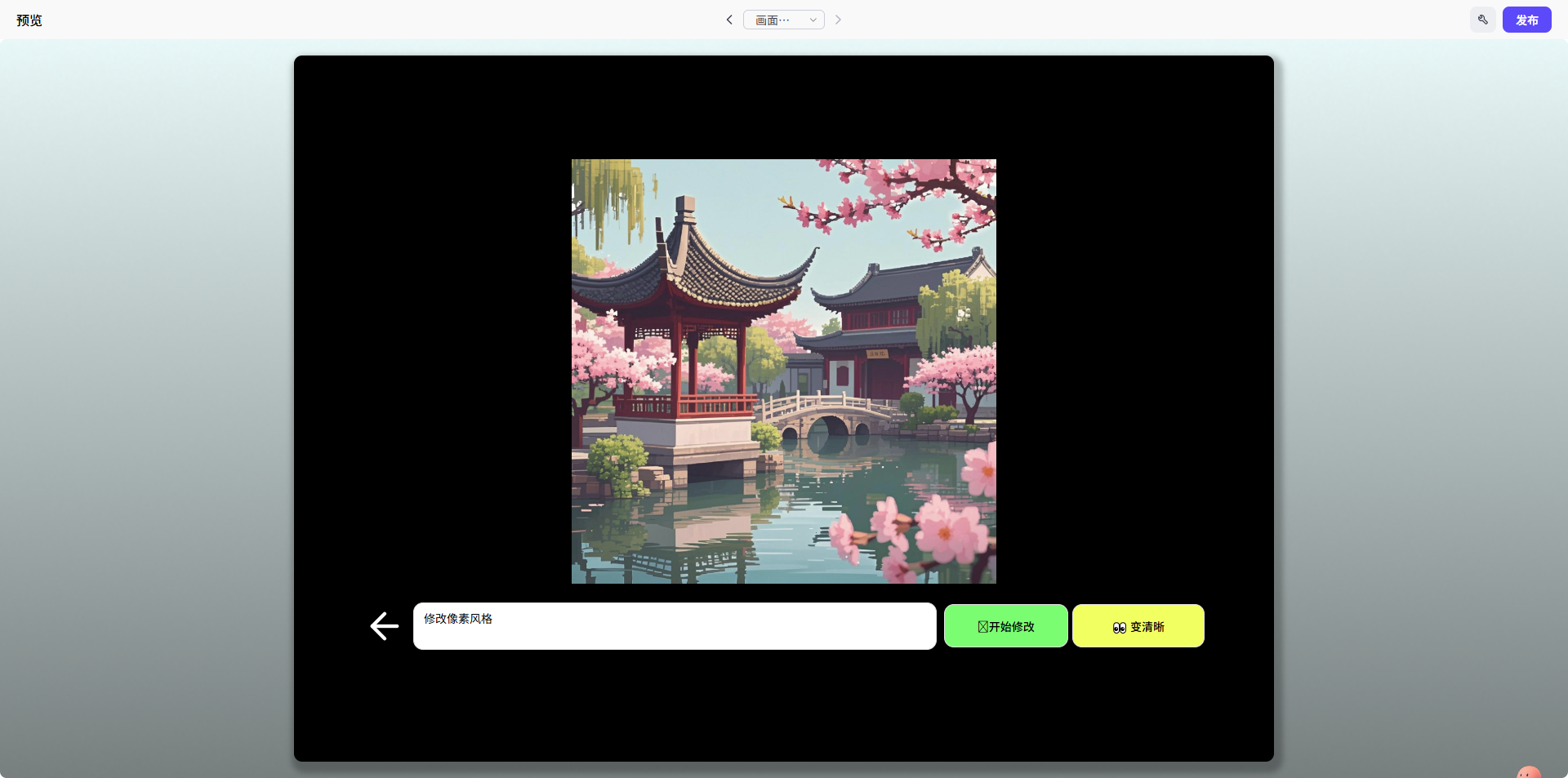
扣子创建一个应用
什么是扣子应用 扣子应用可以让你相对轻松的搭建一个具备AI功能的应用,它区别智能体,在于智能体的ui和交互相对固定,主要是以对话框聊天的方式进行交互,而扣子应用则可以让ui交互表现更加丰富。 实践一个生成图片的应用 这里我…...

SpringBoot教程(vuepress版)
Spring Boot 教程 项目介绍 这是一个系统化的 Spring Boot 学习教程,采用循序渐进的方式,帮助开发者从零开始掌握 Spring Boot 开发。 教程特点 系统化的知识结构实用的代码示例完整的实战案例丰富的练习作业 目录结构 基础入门 Spring Boot 简介…...
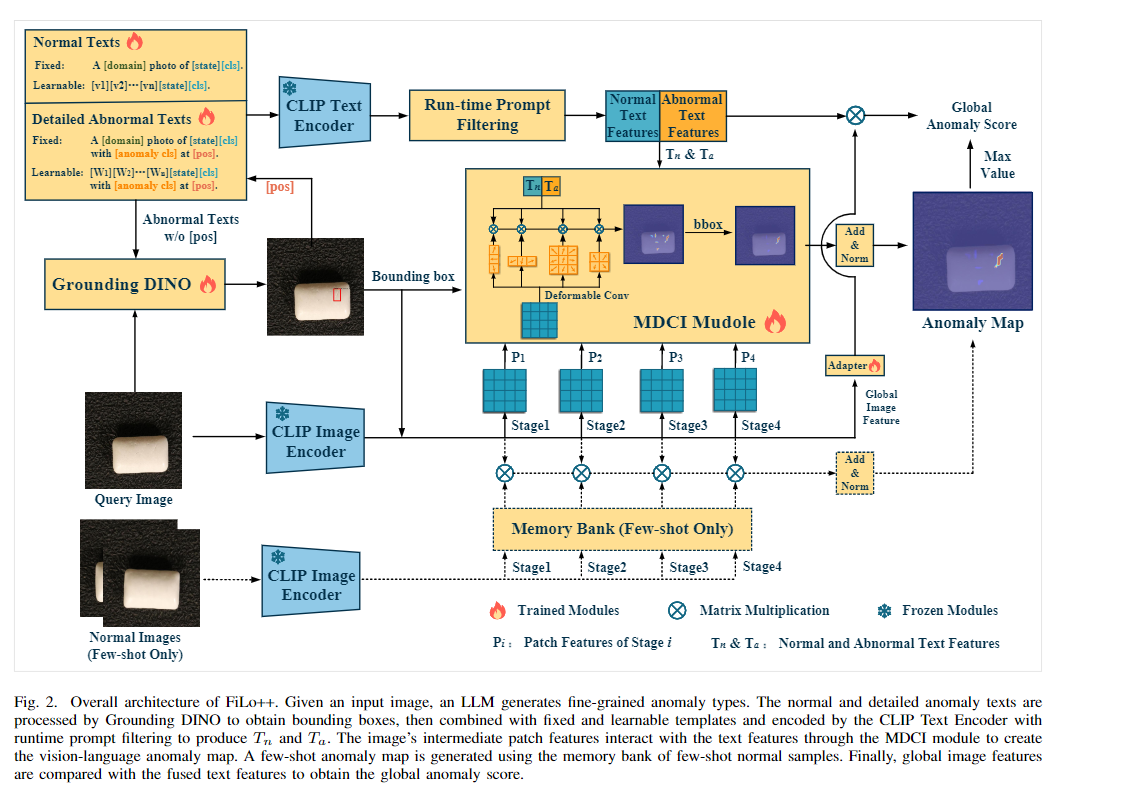
FiLo++的框架图介绍
FiLo框架图模块详解 1. 文本生成模块 Normal Texts 功能:生成正常样本的文本描述。输入:固定模板(如 A [domain] photo of [state][cls])和可学习模板(如 [v1][v2]...[vm][state][cls])。输出:融…...
C++--入门基础
C入门基础 1. C的第一个程序 C继承C语言许多大多数的语法,所以以C语言实现的hello world也可以运行,C中需要把文件定义为.cpp,vs编译器看是.cpp就会调用C编译器编译,linux下要用g编译,不再是gcc。 // test.cpp #inc…...
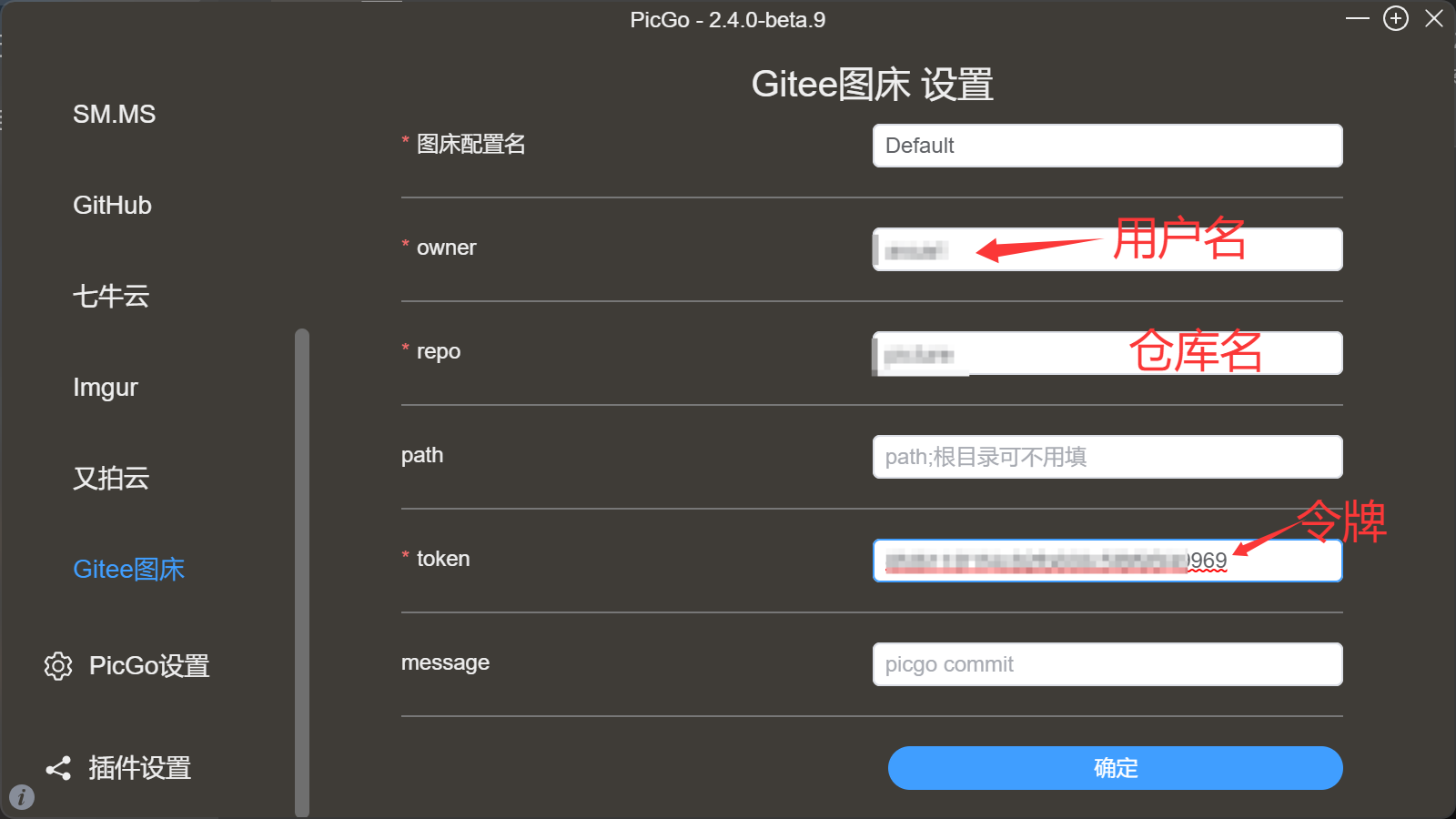
准确---Typora配置Gitee图床并实现自动图片上传
下载地址:https://github.com/Molunerfinn/picgo/releases 安装就直接下一步,下一步就行 安装完以后然后回到Typora上偏好设置指定一下路径 默认是 C:\Program Files\PicGo\PicGo.exe 并且还需要选择规则 接下来就需要去PicGo上面配置了 配置之前需要去…...
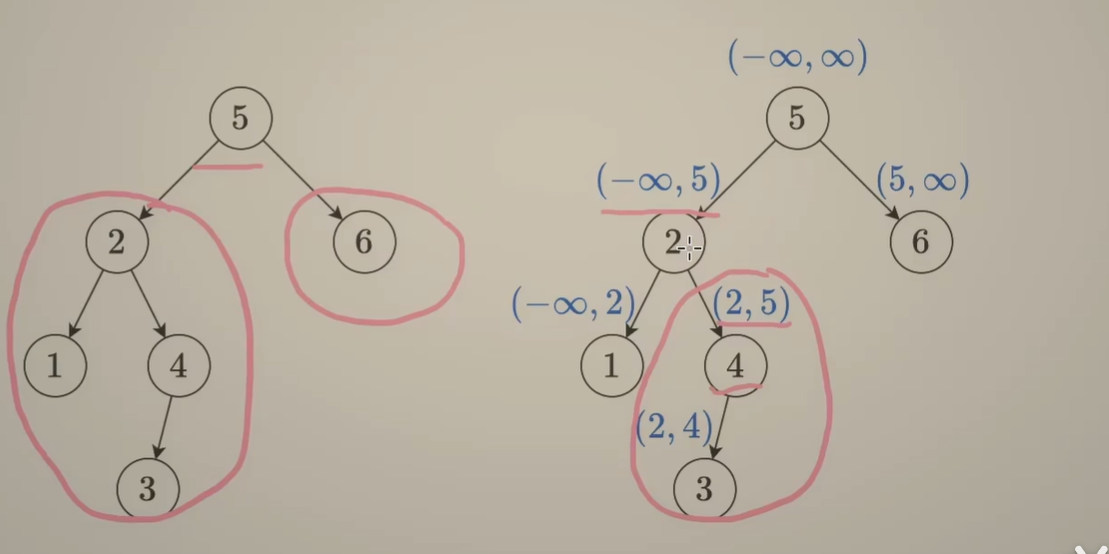
Day111 | 灵神 | 二叉树 | 验证二叉搜索树
Day111 | 灵神 | 二叉树 | 验证二叉搜索树 98.验证二叉搜索树 98. 验证二叉搜索树 - 力扣(LeetCode) 方法一:前序遍历 递归函数传入合法的左右边界,只有当前结点是合法的边界,才是二叉搜索树,否则就返回…...
Redis 8.0 正式版发布,新特性很强!
就在前两天,Redis 8.0 正式版 (GA) 来了!这并不是一次简单的更新,Redis 8.0 不仅带来了性能上的进一步提升,还带来一些实用的新特性与功能增强。并且,最重要的是拥抱 AGPLv3 重归开源! 下面,简单…...

Prompt Engineering 提示词工程学习
一、Prompt Engineering 简介 Prompt Engineering 是设计和优化输入提示(Prompt)以获得预期输出的过程。在与大型语言模型(如 GPT-4)交互时,如何构造提示会显著影响模型的回答质量。 二、Prompt 的重要性 提高生成准确性:通过正确的 Prompt 引导,模型能够更好地理解用…...
以太坊智能合约开发框架:Hardhat v2 核心功能从入门到基础教程
一、设置项目 Hardhat 项目是安装了 hardhat 包并包含 hardhat.config.js 文件的 Node.js 项目。 操作步骤: ①初始化 npm npm init -y②安装 Hardhat npm install --save-dev hardhat③创建 Hardhat 项目 npx hardhat init如果选择 Create an empty hardhat.…...

了解Dockerfile
定制docker 镜像的方式: 手动修改容器内容,导出新的镜像基于dockerfile 自行编写指令,基于指令流程创建镜像 镜像和容器的层级实现 docker拉取镜像到docker engine 之后,共享系统内核。 在内核层上有镜像层(本质上只…...

7. HTML 表格基础
表格是网页开发中最基础也最实用的元素之一,尽管现代前端开发中表格布局已被 CSS 布局方案取代,但在展示结构化数据时,表格依然发挥着不可替代的作用。本文将基于提供的代码素材,系统讲解 HTML 表格的核心概念与实用技巧。 一、表格的基本结构 一个完整的 HTML 表格由以下…...