AVL树:保持平衡的高效二叉搜索树
目录
一、AVL树的概念
1. 二叉搜索树的局限性
2. AVL树的定义
二、AVL树节点结构
三、AVL树的插入操作
1. 插入流程
2. 代码实现片段
四、AVL树的旋转调整
1. 左单旋(RR型)
2. 右单旋(LL型)
3. 左右双旋(LR型)
4. 右左双旋(RL型)
五、AVL树的性能
1. 时间复杂度
2. 空间复杂度
3. 性能优势
4. 性能不足
5. 与红黑树的对比
六、AVL树的验证
一、AVL树的概念
1. 二叉搜索树的局限性
二叉搜索树(BST)在理想情况下具有O(log₂N)的查询效率,但当插入数据有序或接近有序时,树会退化为链表结构,查询效率骤降至O(N)。为了解决这一问题,AVL树应运而生。
2. AVL树的定义
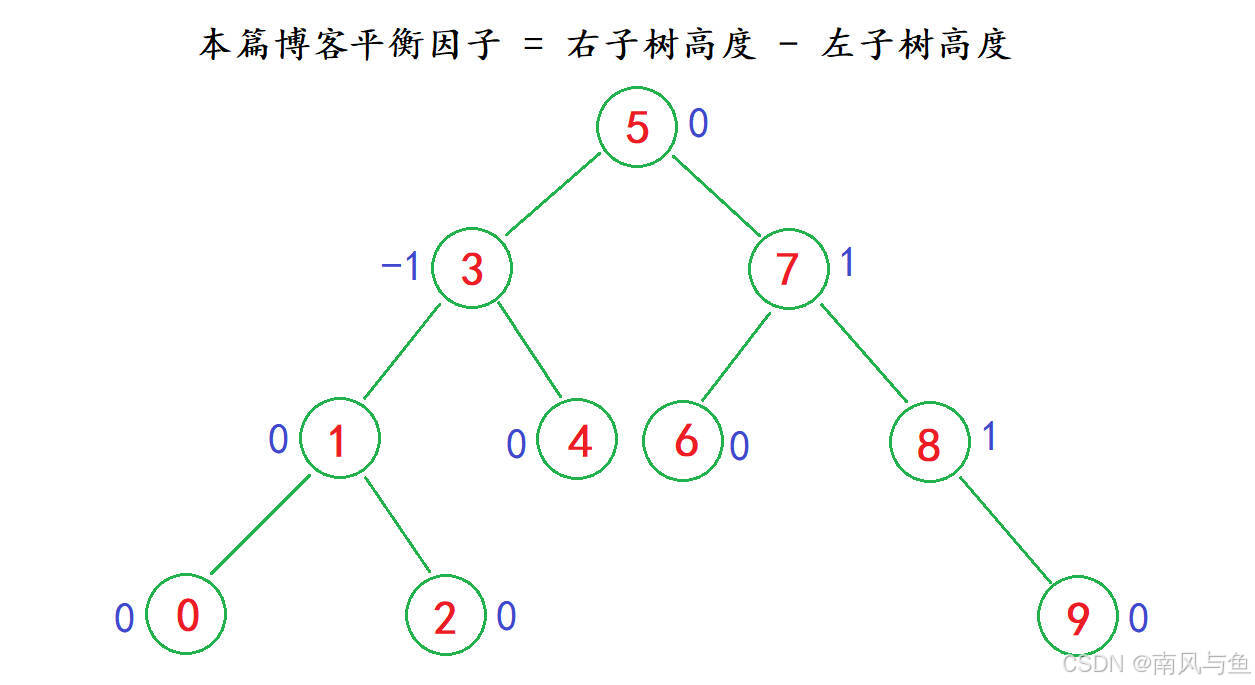
AVL树是由俄罗斯数学家G.M.Adelson-Velskii和E.M.Landis在1962年发明的一种自平衡二叉搜索树:当向二叉搜索树中插入新结点后,如果能保证每个结点的左右子树高度之差的绝对值不超过1(需要对树中的结点进行调整),即可降低树的高度,从而减少平均搜索长度。
一棵AVL树或者是空树,或者是具有以下性质的二叉搜索树:
- 它的左右子树都是AVL树。
- 左右子树高度之差(简称平衡因子)的绝对值不超过1,即平衡因子只能是-1、0或1。
- 通过旋转操作维护平衡,保证树高始终为O(log₂N)。
二、AVL树节点结构
在实现 AVL 树时,我们采用 KV 模型的 AVL 树节点定义,采用三叉链结构为每个节点配备左孩子、右孩子以及父节点指针。此外,每个节点引入平衡因子,以便高效地维护树的平衡性。在构造新节点时,由于其左右子树均为空树,所以初始平衡因子设置为 0,这样可以准确反映节点的初始状态。
需要注意的是,给每个节点增加平衡因子虽然不是必须的,但这是一种非常便捷的实现方式。如果不引入平衡因子,虽然也可以实现 AVL 树,但实现过程会复杂得多,需要通过递归计算每个节点的左右子树高度来判断是否平衡。而引入平衡因子后,我们可以在节点插入和删除操作时直接更新和利用平衡因子,从而高效地维护树的平衡性,确保 AVL 树的性能优势得以充分发挥。
template<class K, class V>
struct AVLTreeNode
{// 三叉链结构AVLTreeNode<K, V>* _left;AVLTreeNode<K, V>* _right;AVLTreeNode<K, V>* _parent;// 存储键值对pair<K, V> _kv;// 平衡因子(右子树高度 - 左子树高度)int _bf;// 构造函数AVLTreeNode(const pair<K, V>& kv): _left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv), _bf(0){}
};平衡因子计算:_bf = rightHeight - leftHeight
三、AVL树的插入操作
1. 插入流程
AVL树插入结点的操作分为如下三个步骤:
-
找到待插入位置:按照二叉搜索树的规则,若待插入结点的key值比当前结点小,则插入到左子树;若大于,则插入到右子树;若相等,则插入失败。
-
将结点插入树中:找到合适的位置后,将新结点插入到树中。
-
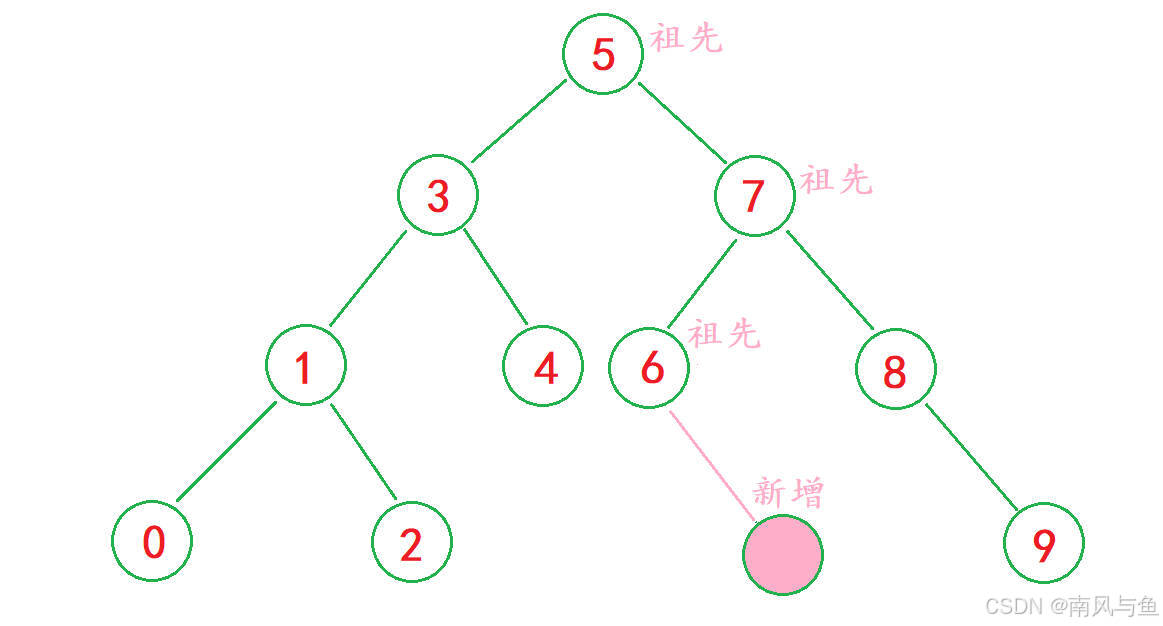
更新平衡因子并旋转调整:插入新结点后,从新结点的父结点开始,向上更新平衡因子。若父结点的平衡因子变为-1或1,则需继续向上更新;若变为0,则停止更新;若变为-2或2,则需进行旋转操作以恢复平衡。
-
更新平衡因子:新增结点在parent的右边,parent的平衡因子加1;新增结点在parent的左边,parent的平衡因子减1。
-
旋转操作:当parent的平衡因子为-2且cur的平衡因子为-1时,进行右单旋;当parent的平衡因子为-2且cur的平衡因子为1时,进行左右双旋;当parent的平衡因子为2且cur的平衡因子为-1时,进行右左双旋;当parent的平衡因子为2且cur的平衡因子为1时,进行左单旋。
-
注意,当parent的平衡因子为-2或2时,cur的平衡因子必定是-1或1而不会是0,因为若cur的平衡因子是0,那么cur一定是新增结点,而新增结点最终会插入到一个空树中。在新增结点插入前,其父结点的平衡因子要么是0(左右子树均为空),新增结点插入后其平衡因子变为-1或1;要么是-1或1(左右子树其一不为空),新增结点插入到其父结点的空子树中,插入后其父结点的平衡因子变为0。
旋转操作后,树的高度变为插入之前的高度,因此不会影响其父结点的平衡因子,所以无需继续往上更新平衡因子。
2. 代码实现片段
bool Insert(const pair<K, V>& kv)
{if (_root == nullptr) // 若AVL树为空树,则插入结点直接作为根结点{_root = new Node(kv);return true;}// 1、按照二叉搜索树的插入方法,找到待插入位置Node* cur = _root;Node* parent = nullptr;while (cur){if (kv.first < cur->_kv.first) // 待插入结点的key值小于当前结点的key值{parent = cur;cur = cur->_left;}else if (kv.first > cur->_kv.first) // 待插入结点的key值大于当前结点的key值{parent = cur;cur = cur->_right;}else // 待插入结点的key值等于当前结点的key值{return false; // 插入失败(不允许key值冗余)}}// 2、将待插入结点插入到树中cur = new Node(kv); // 根据所给值构造一个新结点if (kv.first < parent->_kv.first) // 新结点的key值小于parent的key值{parent->_left = cur;cur->_parent = parent;}else // 新结点的key值大于parent的key值{parent->_right = cur;cur->_parent = parent;}// 3、更新平衡因子,如果出现不平衡,则需要进行旋转while (cur != _root) // 最坏一路更新到根结点{if (cur == parent->_left) // parent的左子树增高{parent->_bf--;}else if (cur == parent->_right) // parent的右子树增高{parent->_bf++;}// 判断是否更新结束或需要进行旋转if (parent->_bf == 0) // 更新结束(新增结点把parent左右子树矮的那一边增高了,此时左右高度一致){break; // parent树的高度没有发生变化,不会影响其父结点及以上结点的平衡因子}else if (parent->_bf == -1 || parent->_bf == 1) // 需要继续往上更新平衡因子{cur = parent;parent = parent->_parent;}else if (parent->_bf == -2 || parent->_bf == 2) // 需要进行旋转(此时parent树已经不平衡了){if (parent->_bf == -2){if (cur->_bf == -1){RotateR(parent); // 右单旋}else // cur->_bf == 1{RotateLR(parent); // 左右双旋}}else // parent->_bf == 2{if (cur->_bf == -1){RotateRL(parent); // 右左双旋}else // cur->_bf == 1{RotateL(parent); // 左单旋}}break; // 旋转后就一定平衡了,无需继续往上更新平衡因子(旋转后树高度变为插入之前了)}else{assert(false); // 在插入前树的平衡因子就有问题}}return true; // 插入成功
}四、AVL树的旋转调整
1. 左单旋(RR型)
🌴左单旋触发条件
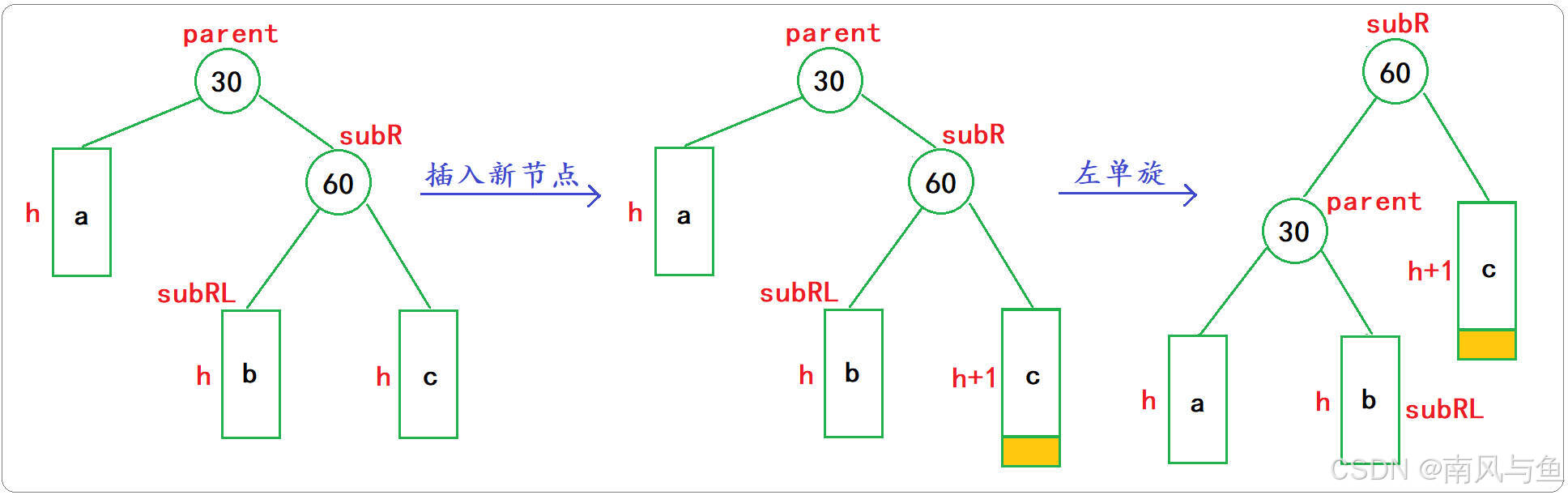
当新节点插入到父节点的右子树的右侧,导致父节点的平衡因子变为2时,需要进行左单旋。
🌴旋转示意图
🌴左单旋步骤
-
记录相关节点 :将父节点的右子节点设为subR,subR的左子节点设为subRL,父节点的父节点设为parentParent。
-
建立subR和parent之间的关系 :将parent的父节点指向subR,subR的左子节点指向parent。
-
建立parent和subRL之间的关系 :将parent的右子节点指向subRL,若subRL存在,则subRL的父节点指向parent。
-
建立parentParent和subR之间的关系 :若parentParent为空,说明父节点是根节点,此时将subR设为新的根节点,并将subR的父节点设为nullptr;否则,根据父节点是其父节点的左孩子还是右孩子,将subR设为对应的孩子,并更新subR的父节点为parentParent。
-
更新平衡因子 :将subR和parent的平衡因子都设为0。
🌴代码示例
//左单旋
void RotateL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;Node* parentParent = parent->_parent;//1、建立subR和parent之间的关系parent->_parent = subR;subR->_left = parent;//2、建立parent和subRL之间的关系parent->_right = subRL;if (subRL)subRL->_parent = parent;//3、建立parentParent和subR之间的关系if (parentParent == nullptr){_root = subR;subR->_parent = nullptr; //subR的_parent指向需改变}else{if (parent == parentParent->_left){parentParent->_left = subR;}else //parent == parentParent->_right{parentParent->_right = subR;}subR->_parent = parentParent;}//4、更新平衡因子subR->_bf = parent->_bf = 0;
}2. 右单旋(LL型)
🌵右单旋触发条件
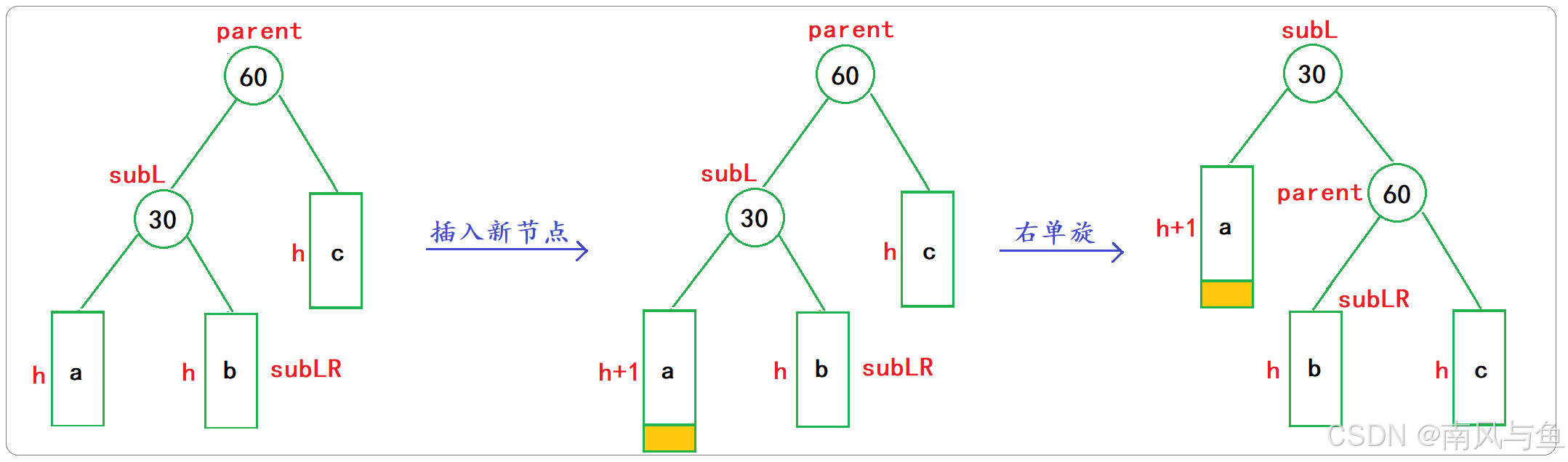
当新节点插入到父节点的左子树的左侧,导致父节点的平衡因子变为-2时,需要进行右单旋。
🌵旋转示意图
🌵右单旋步骤
-
记录相关节点 :记录父节点的左子节点为subL,subL的右子节点为subLR,父节点的父节点为parentParent。
-
调整子节点关系 :将父节点的左子节点指针指向subLR,若subLR不为空,则将subLR的父节点指针指向父节点。
-
调整父节点与subL的关系 :将subL的右子节点指针指向父节点,父节点的父节点指针指向subL。
-
调整父节点的父节点与subL的关系 :若父节点原本是根节点,则将树的根节点指针指向subL,并将subL的父节点指针设为nullptr;否则,根据父节点是其父节点的左孩子还是右孩子,将subL设为对应的孩子,并更新subL的父节点为parentParent。
-
更新平衡因子 :将父节点和subL的平衡因子都设为0。
🌵代码示例
//右单旋
void RotateR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;Node* parentParent = parent->_parent;//1、建立subL和parent之间的关系subL->_right = parent;parent->_parent = subL;//2、建立parent和subLR之间的关系parent->_left = subLR;if (subLR)subLR->_parent = parent;//3、建立parentParent和subL之间的关系if (parentParent == nullptr){_root = subL;subL->_parent = nullptr;}else{if (parent == parentParent->_left){parentParent->_left = subL;}else{parentParent->_right = subL;}subL->_parent = parentParent;}//4、更新平衡因子subL->_bf = parent->_bf = 0;
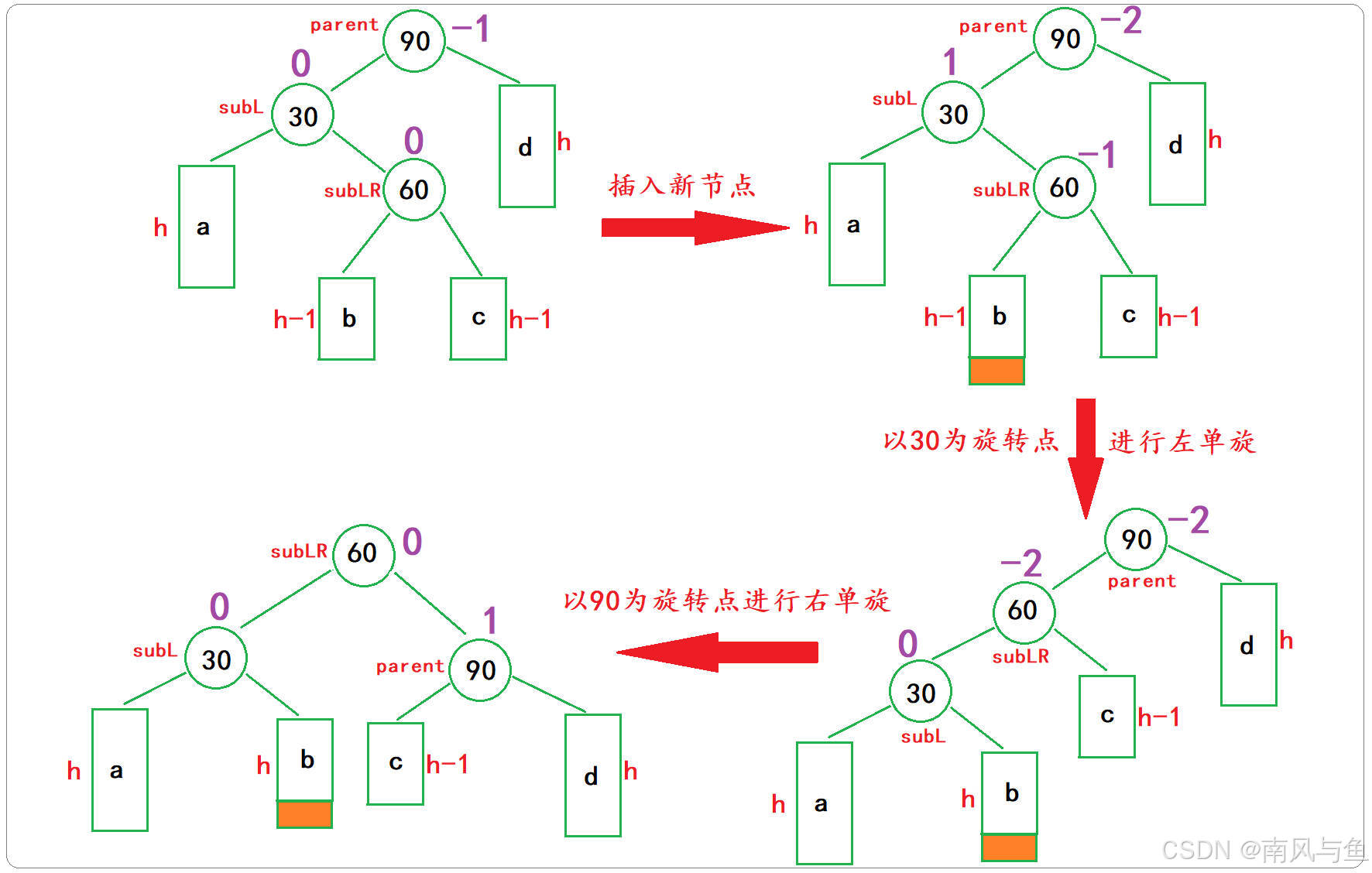
}3. 左右双旋(LR型)
🍒左右双旋触发条件
当新节点插入较高左子树的右侧---左右:先左单旋再右单旋
🍒旋转步骤
-
左单旋:以父节点的左子节点为旋转点进行左单旋。
-
右单旋:以父节点为旋转点进行右单旋。
-
更新平衡因子:根据旋转点节点的原始平衡因子,更新相关节点的平衡因子。
🍒旋转示意图
🍒平衡因子更新
左右双旋后,平衡因子的更新取决于旋转点节点(subLR)的原始平衡因子:
-
当subLR原始平衡因子是-1时:
-
parent的平衡因子更新为1。
-
subL的平衡因子更新为0。
-
subLR的平衡因子更新为0。
-
-
当subLR原始平衡因子是1时:
-
parent的平衡因子更新为0。
-
subL的平衡因子更新为-1。
-
subLR的平衡因子更新为0。
-
-
当subLR原始平衡因子是0时:
-
parent、subL和subLR的平衡因子都更新为0。
-
🍒代码实现
//左右双旋
void RotateLR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf; //subLR不可能为nullptr,因为subL的平衡因子是1//1、以subL为旋转点进行左单旋RotateL(subL);//2、以parent为旋转点进行右单旋RotateR(parent);//3、更新平衡因子if (bf == 1){subLR->_bf = 0;subL->_bf = -1;parent->_bf = 0;}else if (bf == -1){subLR->_bf = 0;subL->_bf = 0;parent->_bf = 1;}else if (bf == 0){subLR->_bf = 0;subL->_bf = 0;parent->_bf = 0;}else{assert(false); //在旋转前树的平衡因子就有问题}
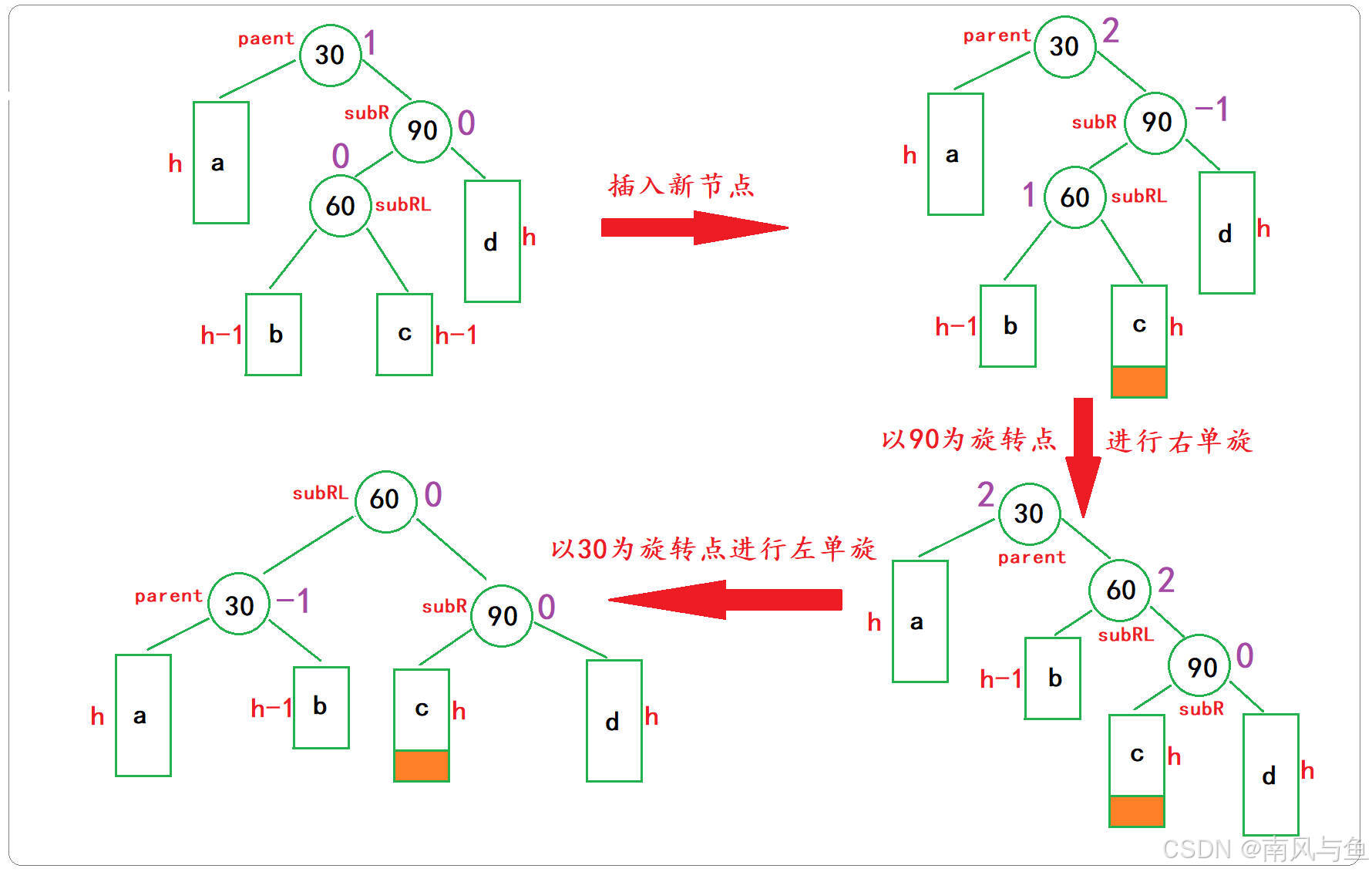
}4. 右左双旋(RL型)
🌻右左双旋触发条件
当新节点插入较高右子树的左侧---右左:先右单旋再左单旋
🌻旋转步骤
右左双旋的操作分为以下步骤:
-
右单旋:以父节点的右子节点为旋转点进行右单旋。
-
左单旋:以父节点为旋转点进行左单旋。
-
更新平衡因子:根据旋转点节点(subRL)的原始平衡因子更新相关节点的平衡因子。
🌻旋转示意图
🌻平衡因子更新
右左双旋后,平衡因子的更新取决于旋转点节点(subRL)的原始平衡因子:
-
当subRL原始平衡因子是1时:
-
parent的平衡因子更新为-1。
-
subR的平衡因子更新为0。
-
subRL的平衡因子更新为0。
-
-
当subRL原始平衡因子是-1时:
-
parent的平衡因子更新为0。
-
subR的平衡因子更新为1。
-
subRL的平衡因子更新为0。
-
-
当subRL原始平衡因子是0时:
-
parent、subR和subRL的平衡因子都更新为0。
-
🌻代码实现
//右左双旋
void RotateRL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;//1、以subR为旋转点进行右单旋RotateR(subR);//2、以parent为旋转点进行左单旋RotateL(parent);//3、更新平衡因子if (bf == 1){subRL->_bf = 0;parent->_bf = -1;subR->_bf = 0;}else if (bf == -1){subRL->_bf = 0;parent->_bf = 0;subR->_bf = 1;}else if (bf == 0){subRL->_bf = 0;parent->_bf = 0;subR->_bf = 0;}else{assert(false); //在旋转前树的平衡因子就有问题}
}五、AVL树的性能
1. 时间复杂度
AVL树的插入、查找和删除操作的时间复杂度均为O(log N),其中N表示树中节点的数量。这是由于AVL树通过旋转操作保持了树的平衡性,使得树的高度始终保持在对数级别。相比于普通二叉搜索树在最坏情况下退化为链表(时间复杂度为O(N)),AVL树的性能更加稳定可靠。
2. 空间复杂度
AVL树每个节点需要存储左子树指针、右子树指针、父节点指针以及平衡因子,因此其空间复杂度为O(N),需要额外的存储空间来维护这些信息。
3. 性能优势
-
高效的数据检索 :AVL树的平衡性保证了树的高度较小,使得查找操作非常高效,适用于需要频繁进行数据查询的场景,如数据库中的索引结构。
-
动态数据管理 :在需要动态插入和删除数据的场景中,AVL树能够保持高效的插入和删除操作,同时保证数据的有序性。
-
避免最坏情况 :相比于普通二叉搜索树,AVL树通过平衡因子和旋转操作,避免了树的退化,确保了操作的最坏时间复杂度为O(log N)。
4. 性能不足
-
旋转操作开销 :插入和删除操作可能导致树的不平衡,需要进行旋转调整,这会增加一定的操作开销。在某些对实时性要求极高的场景中,可能会影响性能。
-
空间浪费 :为了维护平衡因子和指针信息,AVL树需要额外的存储空间,相比一些简单的数据结构(如数组、链表)来说,存在一定的空间浪费。
5. 与红黑树的对比
| 特性 | AVL树 | 红黑树 |
|---|---|---|
| 平衡性 | 严格平衡(高度差 ≤1) | 弱平衡(最长路径 ≤ 2倍最短路径) |
| 查询效率 | 更高(树高更低) | 稍低 |
| 插入/删除 | 调整频率高,适合低频写操作场景 | 调整频率低,适合高频写操作场景 |
| 典型应用 | 数据库索引、字典库 | C++ STL map、Linux 内核调度 |
性能权衡:
-
AVL树:适合读密集型场景(如搜索引擎索引、频繁查询的数据库)
-
红黑树:适合写密集型场景(如实时系统、频繁更新的数据结构)
六、AVL树的验证
-
#include <iostream> #include <vector> #include <cstdlib> #include <ctime> using namespace std;// AVL树节点定义 template<class K, class V> struct AVLTreeNode {pair<K, V> _kv; // 键值对AVLTreeNode<K, V>* _left; // 左子节点指针AVLTreeNode<K, V>* _right; // 右子节点指针AVLTreeNode<K, V>* _parent; // 父节点指针int _bf; // 平衡因子(右子树高度 - 左子树高度)// 构造函数AVLTreeNode(const pair<K, V>& kv): _kv(kv), _left(nullptr), _right(nullptr), _parent(nullptr), _bf(0) {} };// AVL树类定义 template<class K, class V> class AVLTree { public:// 构造函数AVLTree() : _root(nullptr) {}// 析构函数,销毁树中所有节点~AVLTree() {Destroy(_root);}// 插入操作bool Insert(const pair<K, V>& kv) {if (_root == nullptr) {// 如果树为空,直接创建根节点_root = new AVLTreeNode<K, V>(kv);return true;}AVLTreeNode<K, V>* cur = _root;AVLTreeNode<K, V>* parent = nullptr;while (cur) {if (kv.first < cur->_kv.first) {// 向左子树查找插入位置parent = cur;cur = cur->_left;}else if (kv.first > cur->_kv.first) {// 向右子树查找插入位置parent = cur;cur = cur->_right;}else {// 键值已存在,插入失败return false;}}// 创建新节点并插入cur = new AVLTreeNode<K, V>(kv);if (kv.first < parent->_kv.first) {parent->_left = cur;}else {parent->_right = cur;}cur->_parent = parent;// 更新平衡因子并处理可能的旋转while (cur != _root) {if (cur == parent->_left) {parent->_bf++;}else {parent->_bf--;}if (parent->_bf == 0) {// 平衡因子为0,无需进一步更新break;}else if (parent->_bf == 1 || parent->_bf == -1) {// 平衡因子为1或-1,继续向上更新cur = parent;parent = cur->_parent;}else if (parent->_bf == 2 || parent->_bf == -2) {// 平衡因子为2或-2,需要进行旋转if (parent->_bf == 2) {if (cur->_bf == 1) {RotateR(parent); // 右单旋}else {RotateLR(parent); // 左右双旋}}else {if (cur->_bf == -1) {RotateL(parent); // 左单旋}else {RotateRL(parent); // 右左双旋}}break;}}return true;}// 查找操作AVLTreeNode<K, V>* Find(const K& key) {AVLTreeNode<K, V>* cur = _root;while (cur) {if (cur->_kv.first < key) {cur = cur->_right;}else if (cur->_kv.first > key) {cur = cur->_left;}else {return cur;}}return nullptr;}// 验证AVL树是否平衡bool IsBalanceTree() {return _IsBalanceTree(_root);}private:AVLTreeNode<K, V>* _root; // 根节点指针// 递归销毁树节点void Destroy(AVLTreeNode<K, V>* node) {if (node) {Destroy(node->_left);Destroy(node->_right);delete node;}}// 计算节点高度int _Height(AVLTreeNode<K, V>* node) {if (node == nullptr) return 0;return max(_Height(node->_left), _Height(node->_right)) + 1;}// 递归验证树是否平衡bool _IsBalanceTree(AVLTreeNode<K, V>* root) {if (root == nullptr) return true;int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);int diff = rightHeight - leftHeight;// 检查平衡因子是否正确且是否满足 AVL 树平衡条件if (diff != root->_bf || abs(diff) > 1) {return false;}return _IsBalanceTree(root->_left) && _IsBalanceTree(root->_right);}// 右单旋操作void RotateR(AVLTreeNode<K, V>* parent) {AVLTreeNode<K, V>* subL = parent->_left;AVLTreeNode<K, V>* subLR = subL->_right;AVLTreeNode<K, V>* parentParent = parent->_parent;// 更新节点关系subL->_right = parent;parent->_parent = subL;parent->_left = subLR;if (subLR){subLR->_parent = parent;}// 更新根节点或父节点的子节点关系if (parentParent == nullptr) {_root = subL;subL->_parent = nullptr;}else {if (parent == parentParent->_left) {parentParent->_left = subL;}else {parentParent->_right = subL;}subL->_parent = parentParent;}// 更新平衡因子parent->_bf = subL->_bf = 0;}// 左单旋操作void RotateL(AVLTreeNode<K, V>* parent) {AVLTreeNode<K, V>* subR = parent->_right;AVLTreeNode<K, V>* subRL = subR->_left;AVLTreeNode<K, V>* parentParent = parent->_parent;// 更新节点关系subR->_left = parent;parent->_parent = subR;parent->_right = subRL;if (subRL) {subRL->_parent = parent;}// 更新根节点或父节点的子节点关系if (parentParent == nullptr) {_root = subR;subR->_parent = nullptr;}else {if (parent == parentParent->_left) {parentParent->_left = subR;}else {parentParent->_right = subR;}subR->_parent = parentParent;}// 更新平衡因子parent->_bf = subR->_bf = 0;}// 左右双旋操作void RotateLR(AVLTreeNode<K, V>* parent) {RotateL(parent->_left);RotateR(parent);}// 右左双旋操作void RotateRL(AVLTreeNode<K, V>* parent) {RotateR(parent->_right);RotateL(parent);} };// 测试函数 void TestAVLTree() {AVLTree<int, int> t;// 手动插入特定数据验证平衡性vector<int> keys = { 5, 3, 7, 2, 4, 6, 8 };for (auto key : keys) {t.Insert(make_pair(key, key));}cout << "Manual Insert Is Balance Tree: " << t.IsBalanceTree() << endl;// 测试随机数据插入和查找性能const int N = 1000000;vector<int> v;v.reserve(N);srand((unsigned int)time(0));for (int i = 0; i < N; i++) {v.push_back(rand() % N);}size_t beginInsert = clock();for (auto e : v) {t.Insert(make_pair(e, e));}size_t endInsert = clock();cout << "Random Insert Time: " << (endInsert - beginInsert) << "ms" << endl;size_t beginFind = clock();for (auto e : v) {t.Find(e);}size_t endFind = clock();cout << "Random Find Time: " << (endFind - beginFind) << "ms" << endl;cout << "Final Is Balance Tree: " << t.IsBalanceTree() << endl; }int main() {TestAVLTree();return 0; }
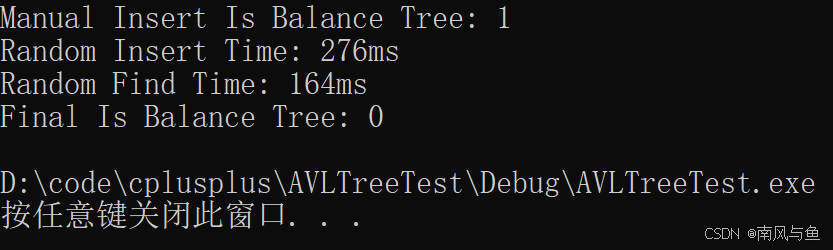
输出结果解释:
Manual Insert Is Balance Tree: 1
- 这表示在手动插入特定键值对(5, 3, 7, 2, 4, 6, 8)后,AVL 树仍然保持平衡。AVL 树通过旋转操作确保每个节点的左右子树高度差的绝对值不超过 1。在这个测试中,插入的键值对会触发 AVL 树的旋转机制,验证了旋转逻辑的正确性。
Random Insert Time: 276ms
- 这表示插入 100 万个随机整数到 AVL 树中所花费的时间约为 276毫秒。这个时间展示了 AVL 树在处理大量数据插入操作时的性能表现。由于 AVL 树的自平衡特性,插入操作的时间复杂度为 O(log N),因此即使数据量很大,插入时间也相对较短。
Random Find Time: 164ms
- 这表示对 AVL 树中的 100 万个随机整数进行查找操作所花费的时间约为 164毫秒。这个时间反映了 AVL 树在查找操作中的高效性。由于 AVL 树保持了树的高度平衡,查找操作的时间复杂度为 O(log N),因此查找速度非常快。
Final Is Balance Tree: 1
- 这表示在插入和查找所有随机数据后,AVL 树仍然保持平衡。这验证了 AVL 树在动态数据操作(插入和查找)后的自平衡能力。无论数据是如何插入的,AVL 树都能通过旋转操作维持其平衡性,确保后续操作的高效性。
相关文章:
AVL树:保持平衡的高效二叉搜索树
目录 一、AVL树的概念 1. 二叉搜索树的局限性 2. AVL树的定义 二、AVL树节点结构 三、AVL树的插入操作 1. 插入流程 2. 代码实现片段 四、AVL树的旋转调整 1. 左单旋(RR型) 2. 右单旋(LL型) 3. 左右双旋(LR型…...

打造专属AI好友:小智AI聊天机器人详解
打造专属AI好友:小智AI聊天机器人详解 在当下的科技热潮中,AI正迅速改变着我们的生活,成为了科技领域的新宠。而今,借助开源项目的力量,你可以亲手打造一个智能小助手——小智AI聊天机器人。它不仅是一个技术探索的窗…...
Webpack基本用法学习总结
Webpack 基本使用核心概念处理样式资源步骤: 处理图片资源修改图片输出文件目录 自动清空上次打包的内容EslintBabel处理HTML资源搭建开发服务器生产模式提取css文件为单独文件问题: Css压缩HTML压缩 小结1高级SourceMap开发模式生产模式 HMROneOfInclud…...

阿里云服务器数据库故障排查指南?
阿里云服务器数据库故障排查指南? 以下是针对阿里云服务器(如ECS自建数据库或阿里云RDS等托管数据库)的故障排查指南,涵盖常见问题的定位与解决方案: 一、数据库连接失败 检查网络连通性 ECS自建数据库 确认安全组规则放行数据库…...

数图闪耀2025深圳CCFA中国零售博览会:AI+零售数字化解决方案引发现场热潮
展会时间:2025年5月8日—10日 地点:深圳国际会展中心(宝安新馆) 【深圳讯】5月8日,亚洲规模最大的零售行业盛会——2025 CCFA中国零售博览会在深圳盛大开幕。本届展会汇聚全球25个国家和地区的900余家参展商ÿ…...
)
Vue2 中 el-dialog 封装组件属性不生效的深度解析(附 $attrs、inheritAttrs 原理)
Vue2 中 el-dialog 封装组件属性不生效的深度解析(附 $attrs、inheritAttrs 原理) 在使用 Vue2 和 Element UI 进行组件封装时,我们常会遇到父组件传入的属性不生效的情况,比如在封装的 el-dialog 组件中传入 width"100%&qu…...
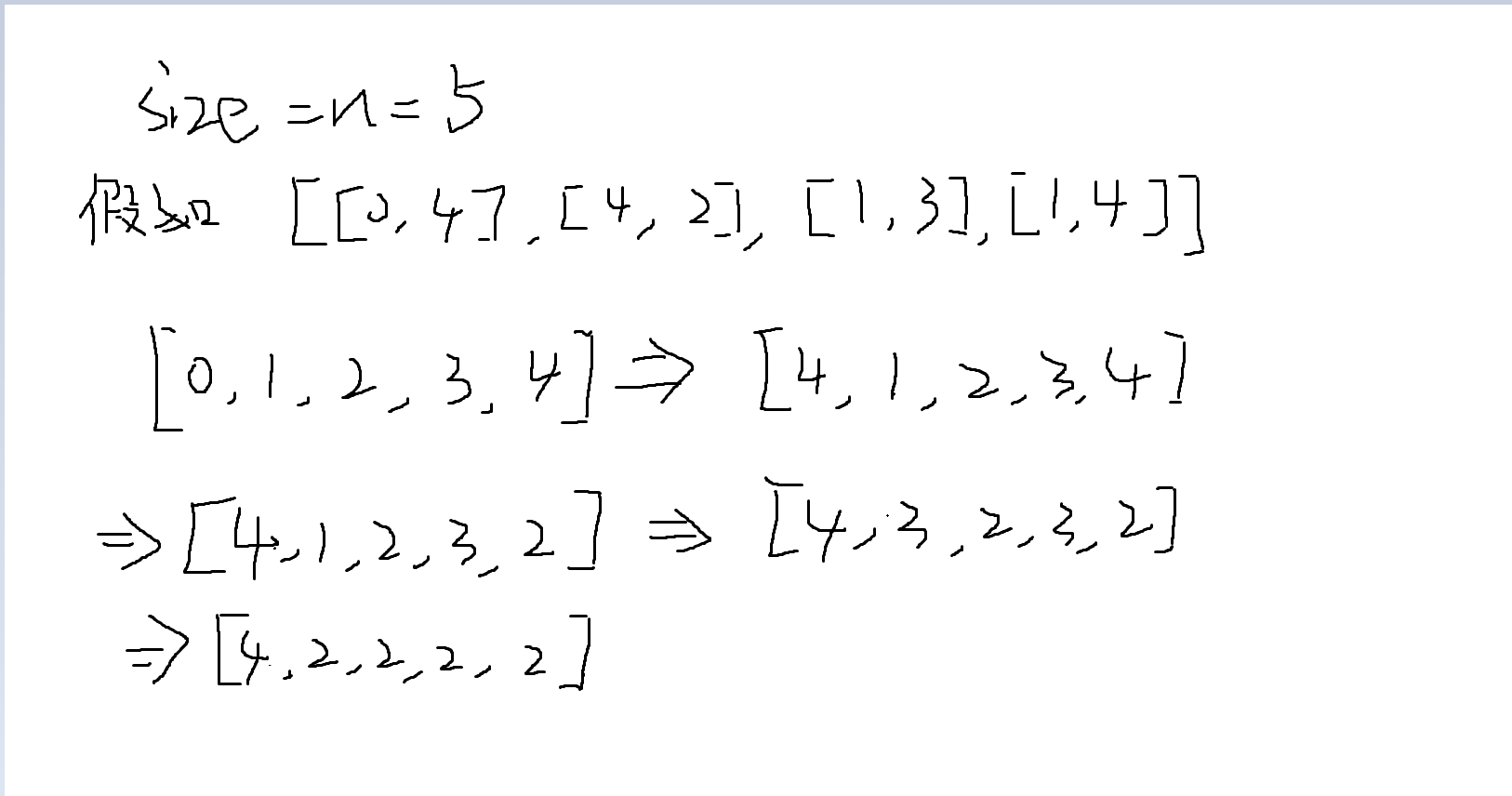
LeetCode 1722. 执行交换操作后的最小汉明距离 题解
示例: 输入:source [1,2,3,4], target [2,1,4,5], allowedSwaps [[0,1],[2,3]] 输出:1 解释:source 可以按下述方式转换: - 交换下标 0 和 1 指向的元素:source [2,1,3,4] - 交换下标 2 和 3 指向的元…...
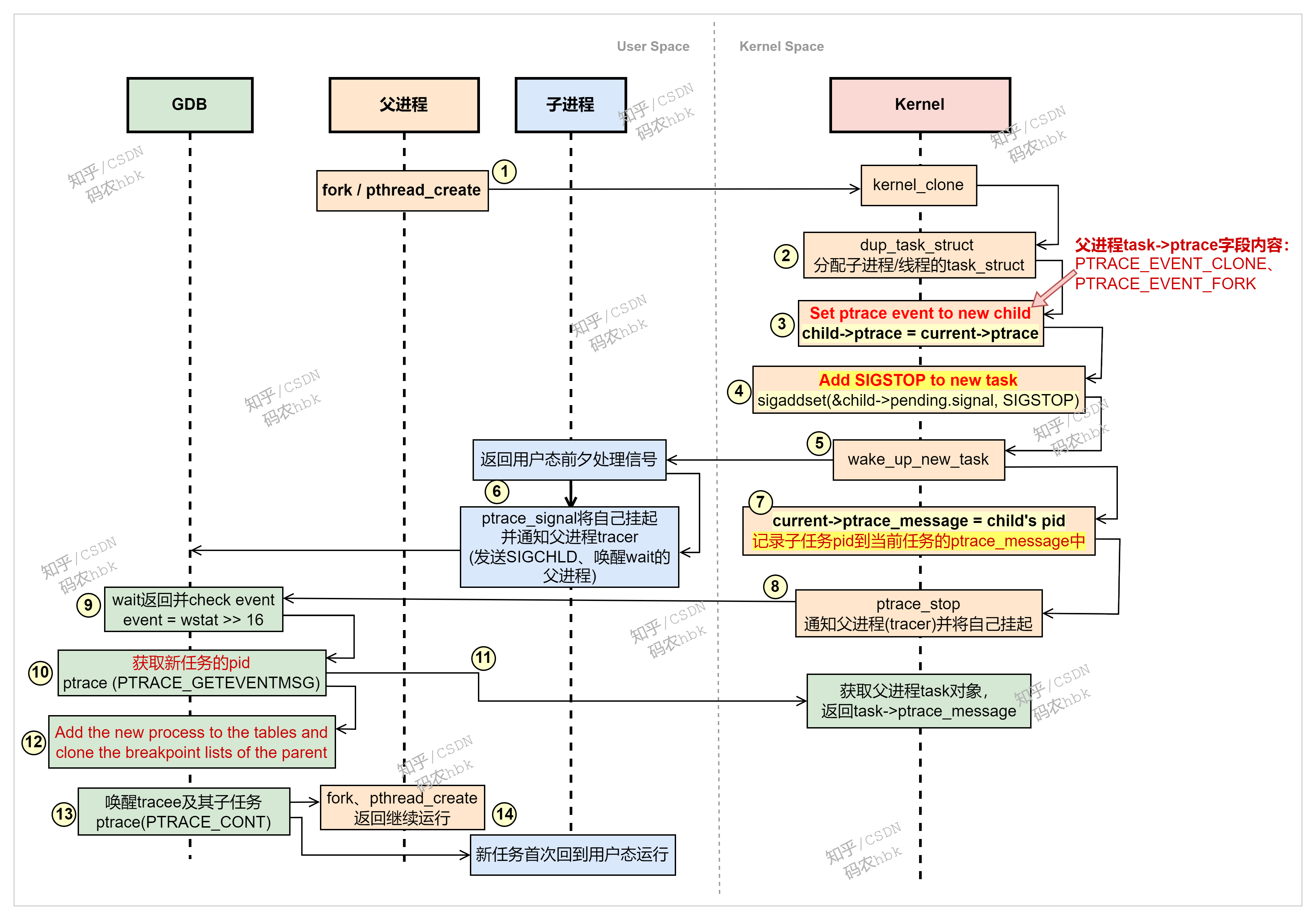
linux ptrace 图文详解(八) gdb跟踪被调试程序的子线程、子进程
目录 一、gdb跟踪被调试程序的fork、pthread_create操作 二、实现原理 三、代码实现 四、总结 (代码:linux 6.3.1,架构:arm64) One look is worth a thousand words. —— Tess Flanders 相关链接: …...

游戏:用python写梦幻西游脚本(谢苏)
《梦幻西游》是一款受欢迎的网络游戏,许多玩家希望通过脚本来增强游戏体验,比如自动打怪、自动治疗等。本文将为您展示一个用Python编写简单《梦幻西游》自动打怪脚本的方案。 需求分析 1.1 具体问题 在《梦幻西游》中,玩家需要频繁与怪物进行…...

MLX-Audio:高效音频合成的新时代利器
MLX-Audio:高效音频合成的新时代利器 现代社会的快节奏生活中,对语音技术的需求越来越高。无论是个性化语音助手,还是内容创作者所需的高效音频生成工具,语音技术都发挥着不可或缺的作用。今天,我们将介绍一个创新的开…...
Spring Boot 3.x集成SaToken使用swagger3+knife4j 4.X生成接口文档
说一说Spring Boot 3.X集成SaToken使用swagger3并使用第三方的knife4j踩过的坑,废话不多说直接上正题,SaToken的我就不贴了 第一步当然是要先导入相关的依赖,包括swagger和knife4j,如下 <dependency><groupId>com.gi…...
用Python监控金价并实现自动提醒!附完整源码
💂 个人网站:【 摸鱼游戏】【神级代码资源网站】【星海网址导航】💻香港大宽带-4H4G 20M只要36/月👉 点此查看详情 在日常投资中,很多朋友喜欢在一些平台买点黄金,低买高卖赚点小差价。但黄金价格实时波动频繁…...

软考-软件设计师中级备考 11、计算机网络
1、计算机网络的分类 按分布范围分类 局域网(LAN):覆盖范围通常在几百米到几千米以内,一般用于连接一个建筑物内或一个园区内的计算机设备,如学校的校园网、企业的办公楼网络等。其特点是传输速率高、延迟低、误码率低…...

【一】浏览器的copy as fetch和copy as bash的区别
浏览器的copy as fetch和copy as bash的区别 位置:devTools->network->请求列表右键 copy as fetch fetch("https://www.kuaishou.com/graphql", {"headers": {"accept": "*/*","accept-language": &qu…...

ChatTempMail - AI驱动的免费临时邮箱服务
在当今数字世界中,保护在线隐私的需求日益增长。ChatTempMail应运而生,作为一款融合人工智能技术的新一代临时邮箱服务,它不仅提供传统临时邮箱的基本功能,还通过AI技术大幅提升了用户体验。 核心功能与特性 1. AI驱动的智能邮件…...

掌握单元测试:提升软件质量的关键步骤
介绍 测试:是一种用来促进鉴定软件的正确性、完整性、安全性和质量的过程。 阶段划分:单元测试、集成测试、系统测试、验收测试。 测试方法:白盒测试、黑盒测试及灰盒测试。 单元测试:就是针对最小的功能单元(方法&…...

DeepSeek+Excel:解锁办公效率新高度
目录 一、引言:Excel 遇上 DeepSeek二、认识 DeepSeek:大模型中的得力助手2.1 DeepSeek 的技术架构与原理2.2 DeepSeek 在办公场景中的独特优势 三、DeepSeek 与 Excel 结合的准备工作3.1 获取 DeepSeek API Key3.2 配置 Excel 环境 四、DeepSeekExcel 实…...
YOLOv1模型架构、损失值、NMS极大值抑制
文章目录 前言一、YOLO系列v11、核心思想2、流程解析 二、损失函数1、位置误差2、置信度误差3、类别概率损失 三、NMS(非极大值抑制)总结YOLOv1的优缺点 前言 YOLOv1(You Only Look Once: Unified, Real-Time Object Detection)由…...

【论文阅读】——Articulate AnyMesh: Open-Vocabulary 3D Articulated Objects Modeling
文章目录 摘要一、介绍二、相关工作2.1. 铰接对象建模2.2. 部件感知3D生成 三、方法3.1. 概述3.2. 通过VLM助手进行可移动部件分割3.3. 通过几何感知视觉提示的发音估计3.4. 通过随机关节状态进行细化 四、实验4.1. 定量实验发音估计设置: 4.2. 应用程序 五、结论六、思考 摘要…...
HarmonyOS基本的应用的配置
鸿蒙HarmonyOS组建页面 1、创建ets文件并配置2、修改main_pages.json文件3、修改EntryAbility.ets文件(启动时加载的页面) 1、创建ets文件并配置 Index.ets是创建项目自动构建生成的,我们可以将其删除掉,并重新在page文件夹下创建…...
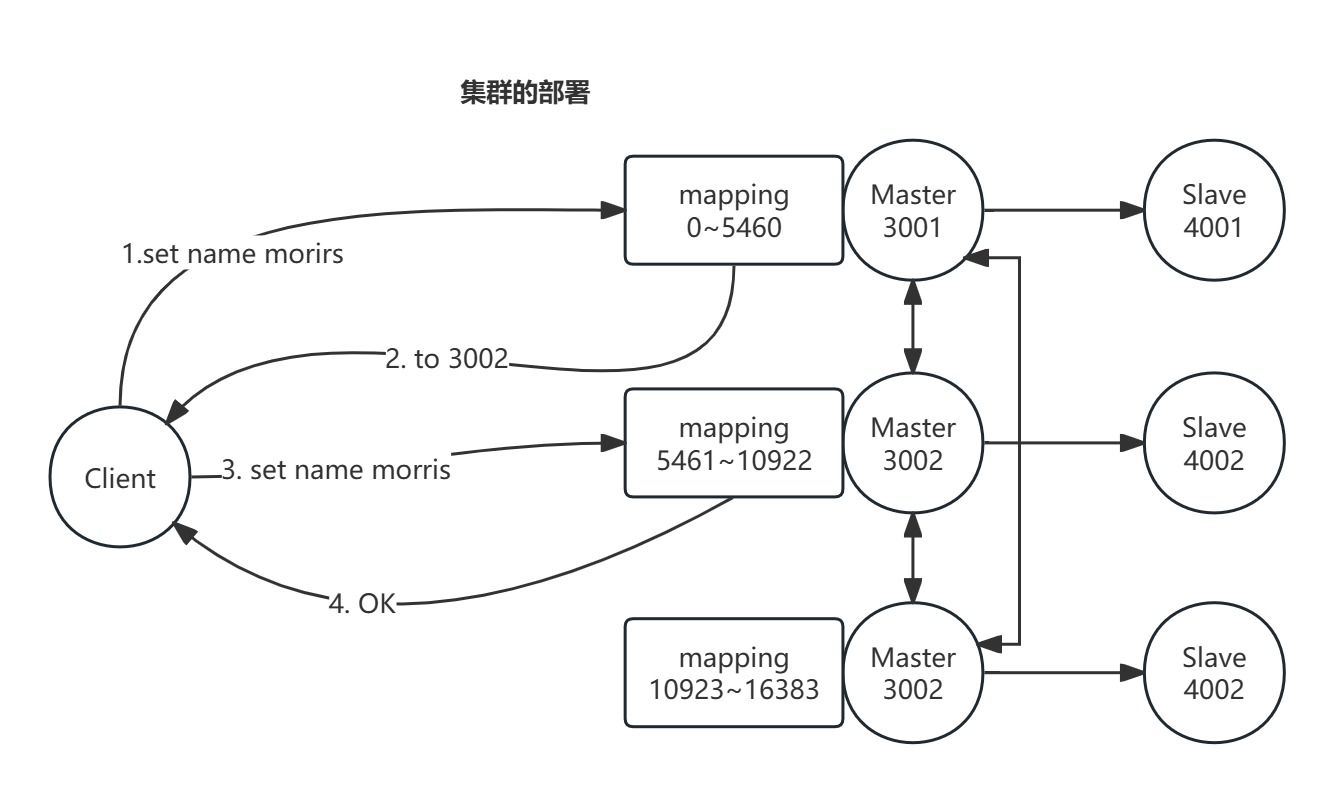
【redis】集群模式
Redis Cluster是Redis官方推出的分布式解决方案,旨在通过数据分片、高可用和动态扩展能力满足大规模数据存储与高并发访问的需求。其核心机制基于虚拟槽分区,将16384个哈希槽均匀分配给集群中的主节点,每个键通过CRC16哈希算法映射到特定槽位…...

生成自定义的androidjar文件具体操作
在Androidsdk目录下的platform找到对应的api的android源码包路径,如android-32拷贝里面的android.jar文件到目录,如 C:\Users\xxxxxxx\Desktop\android\new_android_jar,然后解压android.jar到目录new_android_jar下。在编译后的aosp源码中找…...
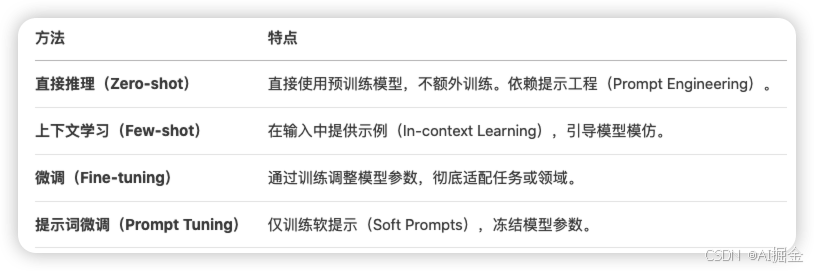
DeepSeek实战--微调
1.为什么是微调 ? 微调LLM(Fine-tuning Large Language Models) 是指基于预训练好的大型语言模型(如GPT、LLaMA、PaLM等),通过特定领域或任务的数据进一步训练,使其适应具体需求的过程。它是将…...

API请求参数有哪些?
通用参数 app_key:应用的唯一标识,用于验证应用身份,调用API时必须提供。 timestamp:请求时间戳,通常为当前时间的毫秒级时间戳,用于防止请求被重放攻击。 format:返回数据的格式,…...

Kaggle图像分类竞赛实战总结详细代码解读
前言 我是跟着李沐的动手学深度学习v2视频学习深度学习的,光看不做假把式,所以在学习完第七章-现代卷积神经网络之后,参加了一次李沐发布的Kaggle竞赛。自己动手,从组织数据集开始,到训练,再到推理&#x…...

系统间安全复制和同步文件
1、系统间安全的复制文件 1.1复制远端文件/目录到本地 scp 192.168.1.2:/etc/yum.conf /etc scp -r 192.168.1.2:/etc/dir /home scp -r -P 6022 root192.168.1.2:/etc/dir /home #-P参数指定远端服务器的ssh端口 1.2 复制本地文件/目录去远端 scp /etc/yum.conf root19…...

Cursor无法SSH远程连接服务器免密登录问题
在本地机器和Ubuntu服务器之间实现SSH远程免密连接,可按如下步骤操作: 1. 生成SSH密钥对 在本地机器上开启终端,使用以下命令生成SSH密钥对: ssh-keygen -t rsa按提示操作,一般直接回车,这样密钥会生成在…...

RHCSA Linux系统软件管理和进程管理
1. RPM管理工具 (1)简介 ① 包名格式 软件名 - 主版本 - 次版本 - 修订号 - 软件发布次数 - 发行商 - CPU架构平台 - 支持系统位数.rpm eg: zsh - 5.0.2 - 14.el7.x86_64.rpm ② 相关网站 http://rpmfind.net/, http://rpm.pbone.net/ ࿰…...
 模型转出)
地平线rdk-x5部署yolo11(1) 模型转出
一. 模型导出: 可以参考RDK X5部署YOLOv8-Seg 和v8差不多 、拷贝YOLO项目 git clone https://github.com/ultralytics/ultralytics.git 2、虚拟环境和依赖安装 # 安装虚拟环境 conda create -n yolov8 python3.8 -y # 进入虚拟环境 conda activate yolov8 # 安…...

开源AI对比--dify、n8n
原文网址:开源AI对比--dify、n8n-CSDN博客 简介 本文介绍开源AI工作流工具的选型。 对比 项difyn8n占优者学习难度简单中等dify核心理念用LLM构建应用。“连接一切”。以工作流自动化连接各系统。平手工作模式 Chatflow:对话。支持用户意图识别、上下…...