图像处理篇---opencv实现坐姿检测
文章目录
- 前言
- 一、方法概述
- 使用OpenCV和MediaPipe
- 关键点检测
- 角度计算
- 姿态评估
- 二、完整代码实现
- 三、代码说明
- PostureDetector类
- find_pose()
- get_landmarks()
- cakculate_angle()
- evaluate_posture()
- 坐姿评估标准(可进行参数调整):
- 可视化功能:
- 如何使用
- 安装依赖库:
- 运行脚本:
- 四、改进方向
前言
坐姿检测是计算机视觉中的一个应用,可以通过分析人体姿态来判断是否保持正确坐姿。下面我将介绍使用Python实现坐姿检测的方法和完整代码。
一、方法概述
使用OpenCV和MediaPipe
使用OpenCV和MediaPipe:MediaPipe提供了现成的人体姿态估计模型
关键点检测
关键点检测:检测身体关键点(如肩膀、耳朵、臀部等)
角度计算
角度计算:计算关键点之间的角度来判断坐姿
姿态评估
姿势评估:根据角度阈值判断坐姿是否正确
二、完整代码实现
import cv2
import mediapipe as mp
import numpy as np
import timeclass PostureDetector:def __init__(self, mode=False, upBody=False, smooth=True, detectionCon=0.5, trackCon=0.5):"""初始化姿势检测器参数:mode: 是否静态图像模式 (False表示视频流)upBody: 是否只检测上半身smooth: 是否平滑处理detectionCon: 检测置信度阈值trackCon: 跟踪置信度阈值"""self.mode = modeself.upBody = upBodyself.smooth = smoothself.detectionCon = detectionConself.trackCon = trackConself.mpDraw = mp.solutions.drawing_utilsself.mpPose = mp.solutions.poseself.pose = self.mpPose.Pose(static_image_mode=self.mode,model_complexity=1,smooth_landmarks=self.smooth,enable_segmentation=False,smooth_segmentation=self.smooth,min_detection_confidence=self.detectionCon,min_tracking_confidence=self.trackCon)# 坐姿评估参数self.good_posture_time = 0self.bad_posture_time = 0self.posture_status = "Unknown"self.last_posture_change = time.time()def find_pose(self, img, draw=True):"""检测图像中的姿势关键点参数:img: 输入图像 (BGR格式)draw: 是否绘制关键点和连接线返回:带标注的图像和姿势关键点"""img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)self.results = self.pose.process(img_rgb)if self.results.pose_landmarks and draw:self.mpDraw.draw_landmarks(img, self.results.pose_landmarks, self.mpPose.POSE_CONNECTIONS)return imgdef get_landmarks(self, img):"""获取所有姿势关键点的坐标参数:img: 输入图像返回:关键点坐标列表 (x,y,z) 或 None"""self.landmarks = []if self.results.pose_landmarks:for id, lm in enumerate(self.results.pose_landmarks.landmark):h, w, c = img.shapecx, cy = int(lm.x * w), int(lm.y * h)self.landmarks.append([id, cx, cy, lm.z])return self.landmarksdef calculate_angle(self, a, b, c):"""计算三个点之间的角度参数:a, b, c: 三个点的坐标 (x,y)返回:角度 (degrees)"""a = np.array(a)b = np.array(b)c = np.array(c)radians = np.arctan2(c[1]-b[1], c[0]-b[0]) - np.arctan2(a[1]-b[1], a[0]-b[0])angle = np.abs(radians * 180.0 / np.pi)if angle > 180.0:angle = 360 - anglereturn angledef evaluate_posture(self, img, draw=True):"""评估坐姿是否正确参数:img: 输入图像draw: 是否在图像上绘制评估结果返回:图像和坐姿评估结果"""current_time = time.time()posture_changed = Falseif not self.landmarks or len(self.landmarks) < 33:return img, "No person detected"# 获取需要的关节点left_shoulder = self.landmarks[11][1:3] # 11: 左肩right_shoulder = self.landmarks[12][1:3] # 12: 右肩left_ear = self.landmarks[7][1:3] # 7: 左耳right_ear = self.landmarks[8][1:3] # 8: 右耳left_hip = self.landmarks[23][1:3] # 23: 左髋right_hip = self.landmarks[24][1:3] # 24: 右髋# 计算肩膀中点shoulder_mid = ((left_shoulder[0] + right_shoulder[0]) // 2,(left_shoulder[1] + right_shoulder[1]) // 2)# 计算耳朵中点ear_mid = ((left_ear[0] + right_ear[0]) // 2,(left_ear[1] + right_ear[1]) // 2)# 计算髋部中点hip_mid = ((left_hip[0] + right_hip[0]) // 2,(left_hip[1] + right_hip[1]) // 2)# 计算脊柱角度 (肩膀-髋部-垂直线)spine_angle = self.calculate_angle((shoulder_mid[0], shoulder_mid[1] - 100), # 肩膀上方一点shoulder_mid,hip_mid)# 计算颈部角度 (耳朵-肩膀-水平线)neck_angle = self.calculate_angle((ear_mid[0] - 100, ear_mid[1]),ear_mid,shoulder_mid)# 坐姿评估标准good_spine = 160 < spine_angle < 200 # 脊柱应该接近垂直good_neck = 70 < neck_angle < 110 # 颈部应该接近垂直# 判断坐姿new_status = "Good" if good_spine and good_neck else "Bad"# 更新姿势状态时间if new_status != self.posture_status:posture_changed = Trueself.last_posture_change = current_timeself.posture_status = new_statuselse:if new_status == "Good":self.good_posture_time += 1else:self.bad_posture_time += 1# 在图像上绘制结果if draw:# 绘制关键点和连接线cv2.circle(img, ear_mid, 8, (255, 0, 0), cv2.FILLED)cv2.circle(img, shoulder_mid, 8, (255, 0, 0), cv2.FILLED)cv2.circle(img, hip_mid, 8, (255, 0, 0), cv2.FILLED)cv2.line(img, ear_mid, shoulder_mid, (255, 0, 0), 3)cv2.line(img, shoulder_mid, hip_mid, (255, 0, 0), 3)# 显示角度信息cv2.putText(img, f"Spine Angle: {int(spine_angle)}", (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2)cv2.putText(img, f"Neck Angle: {int(neck_angle)}", (10, 60), cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2)# 显示坐姿状态color = (0, 255, 0) if new_status == "Good" else (0, 0, 255)cv2.putText(img, f"Posture: {new_status}", (10, 90), cv2.FONT_HERSHEY_SIMPLEX, 0.7, color, 2)# 显示时间统计cv2.putText(img, f"Good Time: {self.good_posture_time//10}s", (10, 120), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 1)cv2.putText(img, f"Bad Time: {self.bad_posture_time//10}s", (10, 140), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 255), 1)# 如果姿势不良,添加警告if new_status == "Bad":cv2.putText(img, "WARNING: Bad Posture!", (img.shape[1]//2 - 150, 30), cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2)return img, new_statusdef main():cap = cv2.VideoCapture(0) # 使用摄像头detector = PostureDetector()while True:success, img = cap.read()if not success:breakimg = detector.find_pose(img)landmarks = detector.get_landmarks(img)if landmarks:img, posture = detector.evaluate_posture(img)cv2.imshow("Posture Detection", img)if cv2.waitKey(1) & 0xFF == ord('q'):breakcap.release()cv2.destroyAllWindows()if __name__ == "__main__":main()
三、代码说明
PostureDetector类
PostureDetector类:核心坐姿检测类
find_pose()
find_pose(): 检测图像中的人体姿势
get_landmarks()
get_landmarks(): 获取姿势关键点坐标
cakculate_angle()
calculate_angle(): 计算三个关键点之间的角度
evaluate_posture()
evaluate_posture(): 评估坐姿是否正确
坐姿评估标准(可进行参数调整):
脊柱角度应在160-200度之间(接近垂直)
颈部角度应在70-110度之间(接近垂直)
满足以上条件判断为"Good"坐姿,否则为"Bad"
可视化功能:
- 绘制关键点和连接线
- 显示角度数值
- 显示坐姿状态和时间统计
- 不良坐姿时显示警告
如何使用
安装依赖库:
pip install opencv-python mediapipe numpy
运行脚本:
python posture_detection.py
调整摄像头位置,确保能清晰看到上半身
四、改进方向
- 添加更多评估标准(如肩膀是否前倾)
- 实现坐姿历史记录和统计分析
- 添加声音提醒功能
- 优化性能(如降低图像分辨率)
- 添加校准功能,适应不同体型
这个实现提供了基本的坐姿检测功能,你可以根据需要进一步扩展和完善。
相关文章:

图像处理篇---opencv实现坐姿检测
文章目录 前言一、方法概述使用OpenCV和MediaPipe关键点检测角度计算姿态评估 二、完整代码实现三、代码说明PostureDetector类find_pose()get_landmarks()cakculate_angle()evaluate_posture() 坐姿评估标准(可进行参数调整):可视化功能&…...
优选算法——前缀和
目录 1. 数组的中心下标 2. 除自身以外数组的乘积 3. 和为k的子数组 4. 和可被K整除的子数组 5. 连续数组 6. 矩阵区域和 1. 数组的中心下标 题目链接:724. 寻找数组的中心下标 - 力扣(LeetCode) 题目展示: 题目分析&am…...

用AI写简历是否可行?
让AI批量写简历然后投简历是绝对不行的!!! 为什么不行,按照 "招聘经理" 工作经历举例: ai提示词:请帮我写一份招聘经理的工作经历内容: 招聘经理 | XXX科技有限公司 | 2020年…...
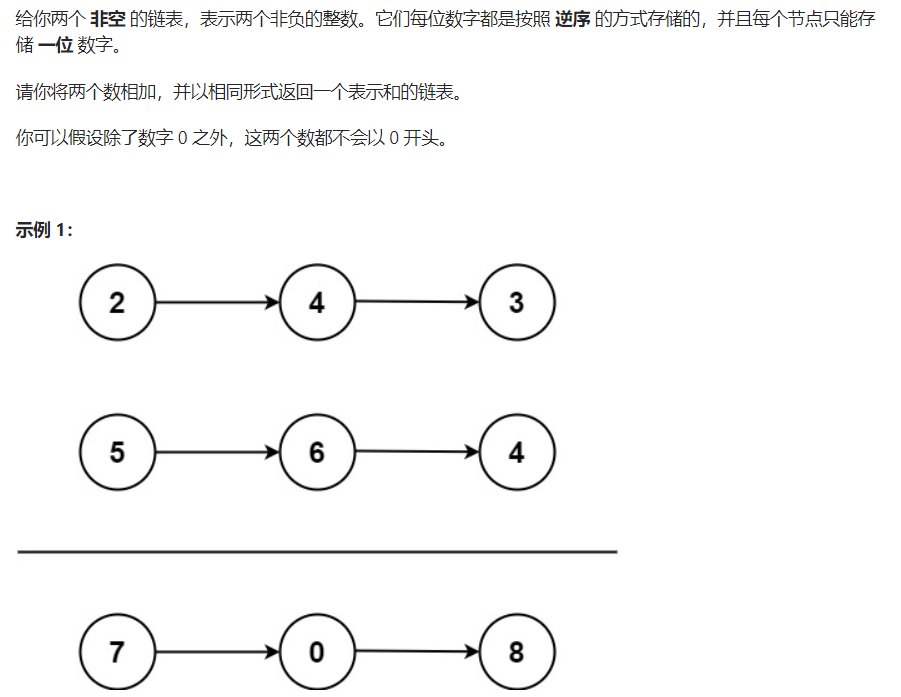
力扣题解:2、两数相加
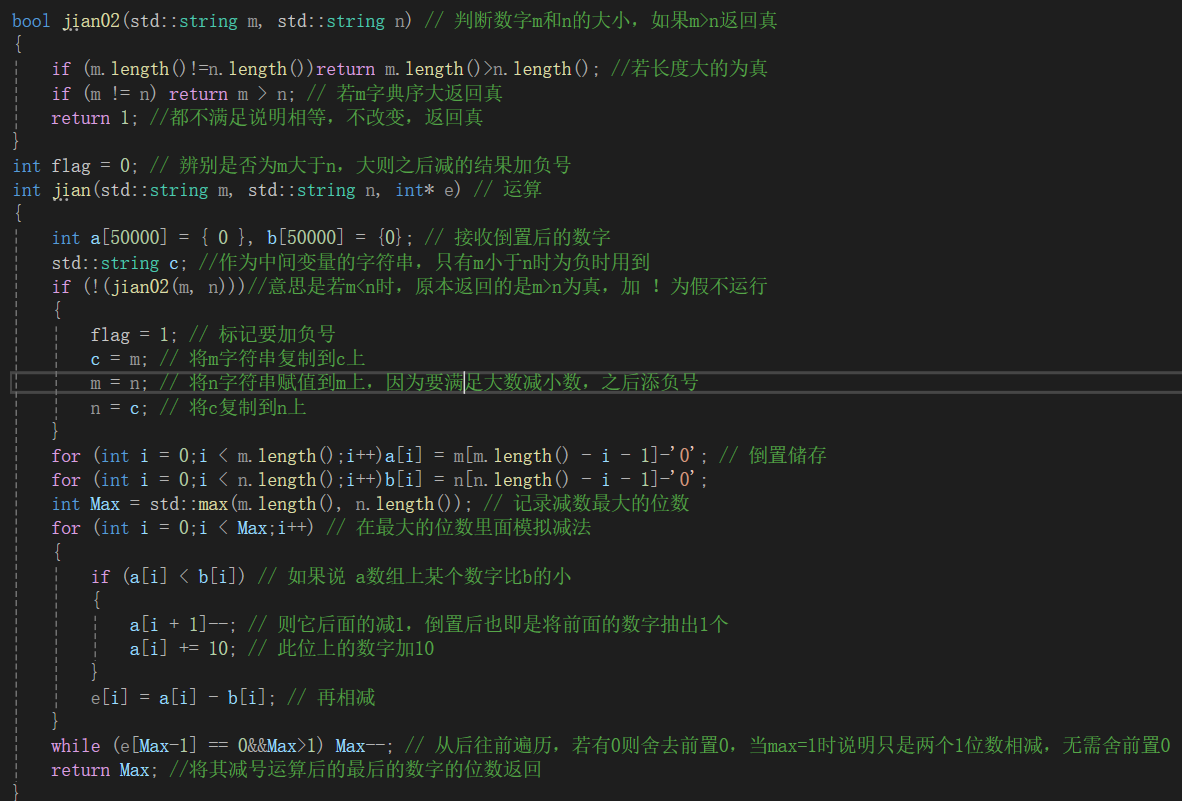
个人认为,该题目可以看作合并两个链表的变种题,本题与21题不同的是,再处理两个结点时,对比的不是两者的大小,而是两者和是否大于10,加法计算中大于10要进位,所以我们需要声明一个用来标记是否进…...

C语言_函数hook方案
背景 单体测试中测试一个函数时,该函数调用的其他函数,需要按照测试case,依赖其他函数进行调用参数检查,返回特定值。但是其他函数,不容易做到参数检查和返回特定值,这时需要将其他函数进行hook,hook函数用户自己实现,比较容易实现参数检查和返回值特定值。 本文主要…...
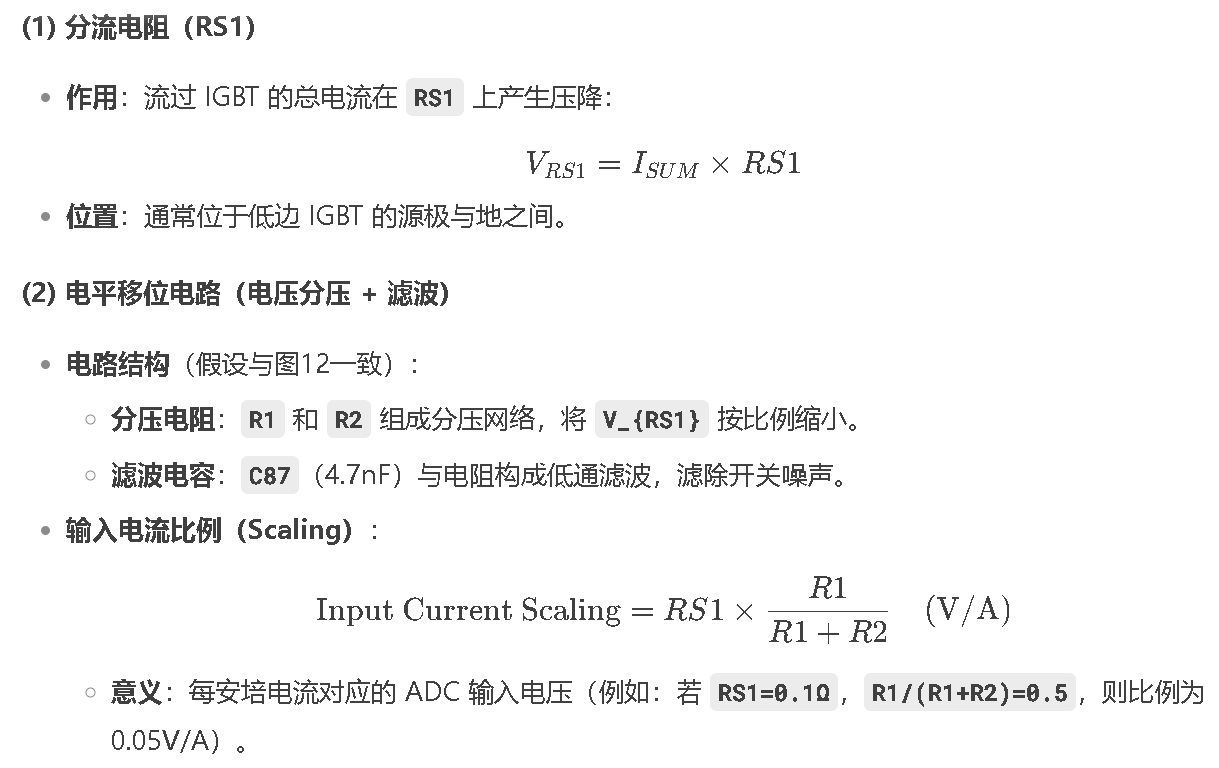
IPM IMI111T-026H 高效风扇控制板
概述: REF-MHA50WIMI111T 是一款专为风扇驱动设计的参考开发板,搭载了英飞凌的IMI111T-026H iMOTION™智能功率模块(IPM)。这个模块集成了运动控制引擎(MCE)、三相栅极驱动器和基于IGBT的功率级,全部封装在一个紧凑的DSO22封装中。REF-MHA50…...

Qt 关于获取postgres time with time zone类型字段存在无效值的情况
Qt 获取 postgres time with time zone类型字段存在无效值的情况 事件起因 在使用Qt获取pg数据库中time with time zone类型字段时偶发出现时间获取失败,体现为获取结果为无效值 QVariant vt sqlQuery->value(i); // QVariant(QTime, QTime(Invalid))查看源码 查看Qt q…...

武汉火影数字|数字科技馆打造:开启科技探索新大门
足不出户,就能畅游科技的奇幻世界,你相信吗?数字科技馆就能帮你实现!在这个数字化的时代,数字科技馆如同一颗璀璨的新星,照亮了我们探索科学的道路。 那么,数字科技馆究竟是什么呢? …...
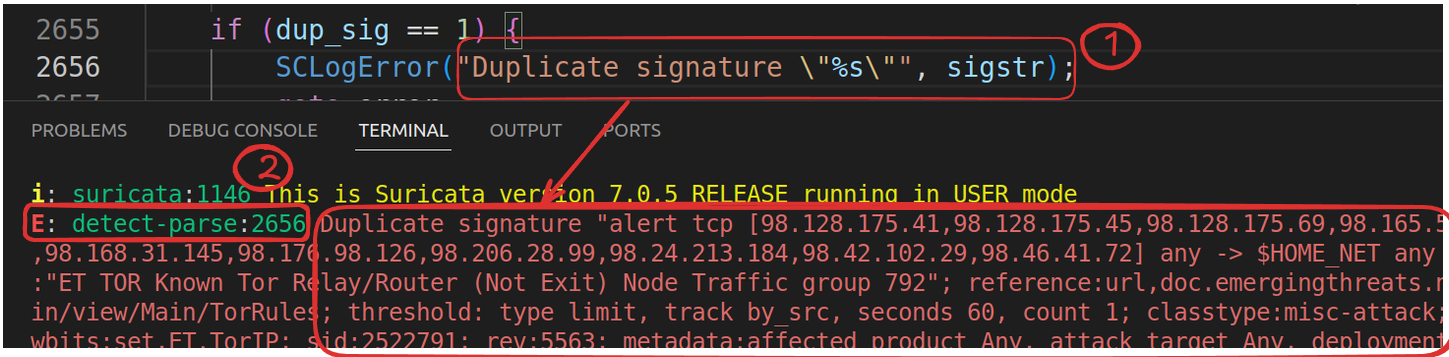
suricata之日志截断
一、背景 在suricata的调试过程中,使用SCLogXXX api进行信息的输出,发现输出的日志被截断了,最开始以为是解析逻辑有问题,没有解析完整,经过排查后,发现SCLogXXX api内部进行了长度限制,最长2K…...

leetcode 2918. 数组的最小相等和 中等
给你两个由正整数和 0 组成的数组 nums1 和 nums2 。 你必须将两个数组中的 所有 0 替换为 严格 正整数,并且满足两个数组中所有元素的和 相等 。 返回 最小 相等和 ,如果无法使两数组相等,则返回 -1 。 示例 1: 输入…...
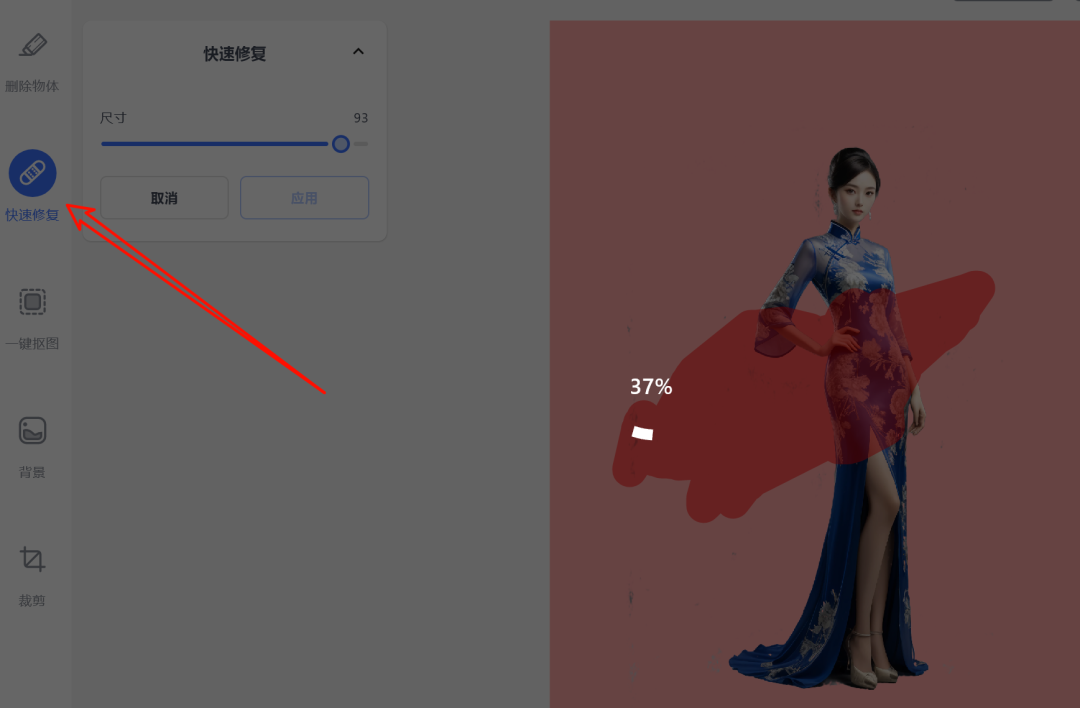
简易图片编辑工具,支持抠图和替换背景
软件介绍 Photo Retouch是一款由微软官方商店推出的免费图片处理软件,具有抠图、换背景、修复等功能,操作便捷且效率极高,非常值得尝试。 功能详解 这款软件提供五大功能,包括删除物体、快速修复、一键抠图、背景调整和裁剪…...
Java Bean容器详解:核心功能与最佳使用实践
在Java企业级开发中,Bean容器是框架的核心组件之一,它通过管理对象(Bean)的生命周期、依赖关系等,显著提升了代码的可维护性和扩展性。主流的框架如Spring、Jakarta EE(原Java EE)均提供了成熟的…...

Spring Security 深度解析:打造坚不可摧的用户认证与授权系统
Spring Security 深度解析:打造坚不可摧的用户认证与授权系统 一、引言 在当今数字化时代,构建安全可靠的用户认证与授权系统是软件开发中的关键任务。Spring Security 作为一款功能强大的 Java 安全框架,为开发者提供了全面的解决方案。本…...

Selenium模拟人类行为,操作网页的方法(全)
看到有朋友评论问,用selenium怎么模仿人类行为,去操作网页的页面呢? 我想了想,这确实是一个很大的点,不应该是一段代码能解决的, 就像是,如果让程序模拟人类的行为。例如模拟人类买菜,做饭&am…...
)
HNUST湖南科技大学-软件测试期中复习考点(保命版)
使用说明:本复习考点仅用于及格保命。软件测试和其他专业课不太一样,记忆的太多了,只能说考试的时候,想到啥就写啥,多写一点!多写一点!多写一点!(重要事情说三遍…...

如何使用极狐GitLab 软件包仓库功能托管 python?
极狐GitLab 是 GitLab 在中国的发行版,关于中文参考文档和资料有: 极狐GitLab 中文文档极狐GitLab 中文论坛极狐GitLab 官网 软件包库中的 PyPI 包 (BASIC ALL) 在项目的软件包库中发布 PyPI 包。然后在需要将它们用作依赖项时安装它们。 软件包库适用…...
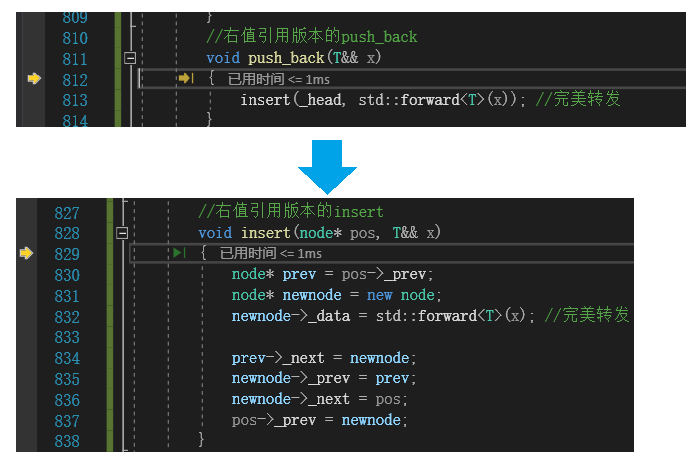
右值引用的剖析
引入:为什么要有右值引用? 右值引用的存在,就是为了解决左值引用解决不了的问题! 左值引用的问题: 我们知道,左值引用在做参数和做返回值都可以提高效率;但是有时候,我们无法用左…...

tmpfs和普通文件系统相比有哪些优缺点
tmpfs 是一种基于内存的文件系统,与普通文件系统相比,在读写速度、数据安全性等方面存在明显差异,以下是其优缺点对比: 优点 读写速度快:普通文件系统读写数据时,需要通过硬盘等存储设备进行 I/O 操作&…...
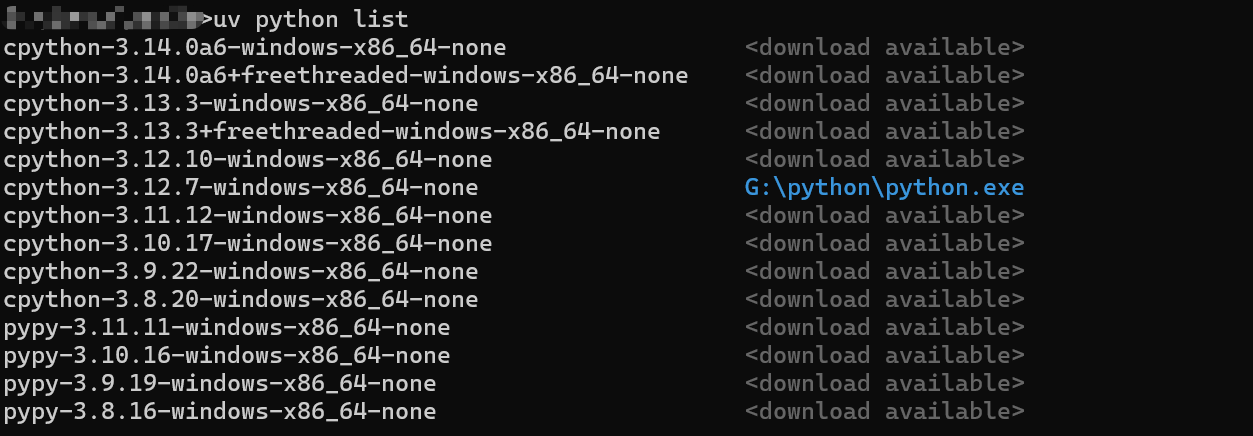
高效Python开发:uv包管理器全面解析
目录 uv简介亮点与 pip、pip-tools、pipx、poetry、pyenv、virtualenv 对比 安装uv快速开始uv安装pythonuv运行脚本运行无依赖的脚本运行有依赖的脚本创建带元数据的 Python 脚本使用 shebang 创建可执行文件使用其他package indexes锁定依赖提高可复现性指定不同的 Python 版本…...

配置指定地址的conda虚拟Python环境
创建指定路径的 Conda 环境 在创建环境时,使用 --prefix 参数指定自定义路径: conda create --prefix/your/custom/path/my_env python3.8 说明: /your/custom/path/my_env:替换为你希望存放环境的路径(如 D:\projec…...

《解锁React Native与Flutter:社交应用启动速度优化秘籍》
React Native和Flutter作为当下热门的跨平台开发框架,在优化应用启动性能方面各有千秋。今天,我们就深入剖析它们独特的策略与方法。 React Native应用的初始包大小对启动速度影响显著。在打包阶段,通过精准分析依赖,去除未使用的…...

【Linux系统编程】进程属性--进程状态
1.进程的状态 1.1进程的状态在PCB中就是一个变量 一般用宏来定义,例如: #define RUNNING 1 #define BLOCK 2 struct task_struct中的int status 1.2并行和并发 CPU执行代码,不是把进程代码执行完毕,才执行下一个࿰…...

Go Modules 的基本使用
在 Go Modules 项目中,首次运行时下载依赖包的正确流程需要根据项目情况区分处理。以下是详细步骤和最佳实践: 一、首次初始化项目的标准流程 1.1 创建项目目录并初始化模块 mkdir myproject && cd myproject go mod init github…...

光流 | 基于深度学习的光流估计算法汇总,原理,公式,流程图,代码
基于深度学习的光流算法 一、光流估计的基本原理二、基于深度学习的光流估计算法1. **FlowNet系列**2. **FlowNet 2.0**3. **PWC-Net**4. **RAFT(Recurrent All-Pairs Field Transformers)**5. **LiteFlowNet系列**三、算法流程图示例FlowNet2.0架构PWC-Net金字塔处理流程四、…...
高精度之加减乘除之多解总结(加与减篇)
开篇总述:精度计算的教学比较杂乱,无系统的学习,且存在同法多线的方式进行同一种运算,所以我写此篇的目的只是为了直指本质,不走教科书方式,步骤冗杂。 一,加法 我在此讲两种方法: …...

dify插件接入fastmcp示例
文章目录 1. 使用python完成mcp服务1.1 准备环境(python安装fastmcp)1.2 mcp服务端示例代码1.3 启动mcp服务端 2. dify接入2.1 安装MCP SSE和 Agent 策略(支持 MCP 工具) 插件2.2 dify agent插件配置mcp:2.3 mcp服务配置ÿ…...
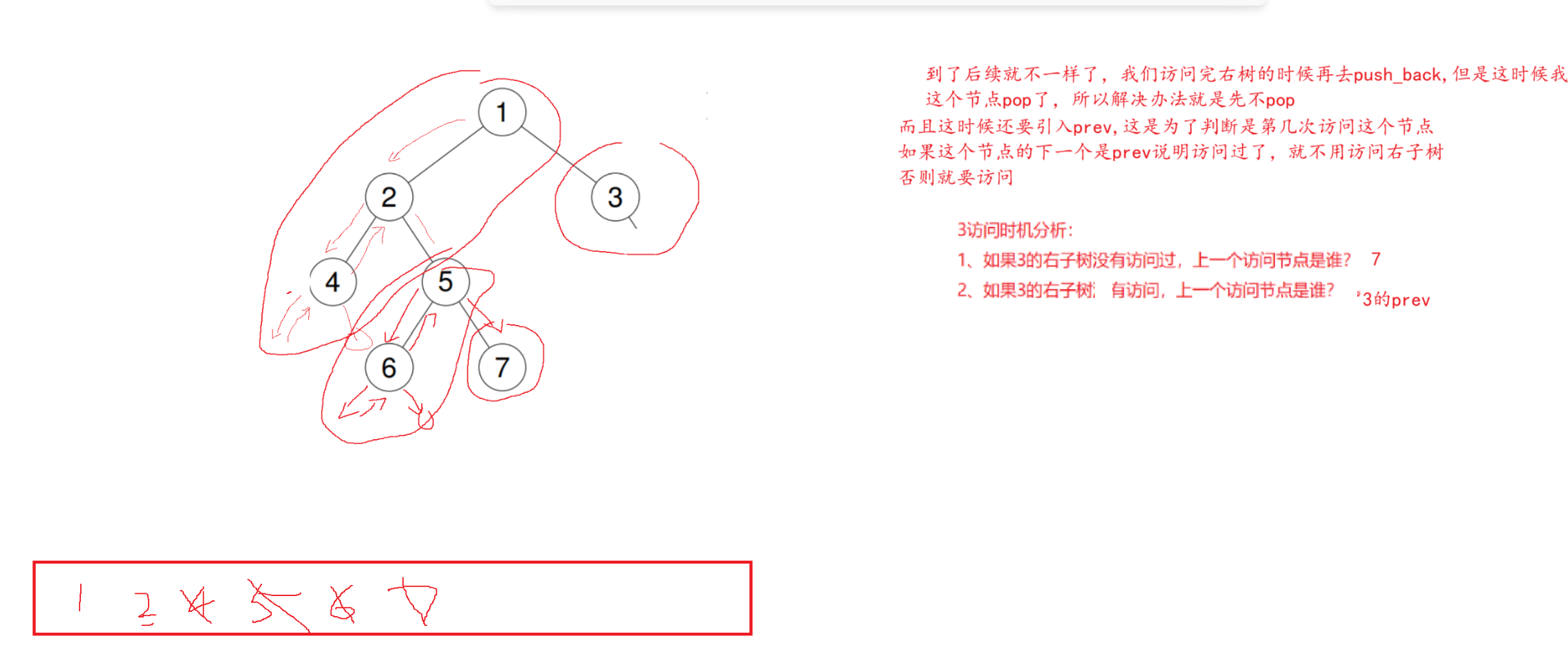
c++——二叉树进阶
1. 内容安排说明 二叉树在前面C数据结构阶段已经讲过,本节取名二叉树进阶是因为: 1. map和set特性需要先铺垫二叉搜索树,而二叉搜索树也是一种树形结构 2. 二叉搜索树的特性了解,有助于更好的理解map和set的特性 3. 二叉树中部…...

MySQL 中如何进行 SQL 调优?
在MySQL中进行SQL调优是一个系统性工程,需结合索引优化、查询改写、性能分析工具、数据库设计及硬件配置等多方面策略。以下是具体优化方法及案例说明: 一、索引优化:精准提速的关键 索引类型选择 普通索引:加速频繁查询的列&…...
—射线检测)
【C++游戏引擎开发】第33篇:物理引擎(Bullet)—射线检测
一、射线检测核心理论体系 1.1 射线检测的数学基础 1.1.1 参数化射线方程 射线在三维空间中的数学表达采用参数方程: r ( t ) = o + t d ^ ( t ∈ [...
基于flask+pandas+csv的报表实现
基于大模型根据提示词去写SQL执行SQL返回结果输出报表技术上可行的,但为啥还要基于pandas去实现呢? 原因有以下几点: 1、大模型无法满足实时性输出报表的需求; 2、使用大模型比较适合数据量比较大的场景,大模型主要…...