【计算机视觉】OpenCV项目实战:OpenCV_Position 项目深度解析:相机定位技术
OpenCV_Position 项目深度解析:基于 OpenCV 的相机定位技术
- 一、项目概述
- 二、技术原理
- (一)单应性矩阵(Homography)
- (二)算法步骤
- (三)相机内参矩阵
- 三、项目实战运行
- (一)环境搭建
- (二)运行步骤
- (三)常见问题及解决方法
- 四、相关研究背景
- (一)单应性矩阵的计算
- (二)单应性矩阵的分解
- (三)相机标定
- 五、总结
在计算机视觉领域,相机定位是一个极具挑战性且应用广泛的任务。通过从视频流中提取已知尺寸的符号并计算单应性矩阵(Homography),可以推断出相机的位置和姿态。GitHub 上的 OpenCV_Position 项目正是基于这一原理,提供了一个简单易懂的入门级解决方案,帮助开发者快速掌握相机定位技术。本文将详细介绍该项目的技术原理、实战运行方式、常见问题及解决方法,以及相关研究背景。
一、项目概述
OpenCV_Position 是由 RaubCamaioni 开发的一个开源项目,旨在通过已知尺寸的符号图像和视频流,计算相机的位置和姿态。该项目最初是为了跟踪一个着陆垫而设计的,经过多年的发展和优化,代码更加清晰易懂,适合初学者学习和实践。
项目的核心是单应性矩阵的计算和分解。通过从视频中提取符号的轮廓,计算符号与已知参考图像之间的单应性矩阵,进而分解出旋转矩阵和平移矩阵,从而推断出相机的相对位置和姿态。
二、技术原理
(一)单应性矩阵(Homography)
单应性矩阵是一个 3×3 的矩阵,用于描述两个平面之间的几何变换关系。在相机定位中,单应性矩阵可以将图像平面上的点映射到另一个平面上的点。通过计算符号图像与参考图像之间的单应性矩阵,可以推断出相机的旋转和平移信息。
(二)算法步骤
OpenCV_Position 的算法流程如下:
- 获取视频帧:从视频流中逐帧读取图像。
- 图像预处理:
- 对图像进行高斯模糊,以减少噪声。
- 将图像转换为灰度图。
- 边缘检测:使用 Canny 算法检测图像中的边缘。
- 轮廓检测:使用 OpenCV 的
findContours函数检测图像中的轮廓。 - 轮廓筛选:
- 筛选出具有特定边数(如 12 边)的轮廓。
- 检查轮廓的周长是否在设定的阈值范围内。
- 检查轮廓的内角是否符合符号的几何特征。
- 将轮廓点按顺时针方向重新排序。
- 将轮廓的起始点调整为最接近参考点的位置。
- 计算单应性矩阵:使用 OpenCV 的
findHomography函数,计算符号轮廓与参考图像之间的单应性矩阵。 - 去除相机矩阵:通过相机的内参矩阵,将单应性矩阵转换为相对于相机坐标系的变换矩阵。
- 分解单应性矩阵:使用 Fast Homography Decomposition 方法,将单应性矩阵分解为旋转矩阵和平移矩阵。
(三)相机内参矩阵
相机内参矩阵是一个 3×3 的矩阵,描述了相机的内部参数,包括焦距、光心位置等。在实际应用中,如果使用不同的相机,需要先通过 OpenCV 提供的标定工具计算相机的内参矩阵。
三、项目实战运行
(一)环境搭建
OpenCV_Position 使用了 Python 和 OpenCV 库。以下是搭建环境的基本步骤:
- 安装 Python:确保已安装 Python 3.x。
- 安装依赖库:
- OpenCV:
pip install opencv-python - NumPy:
pip install numpy - 其他依赖库可以通过
pyproject.toml文件手动安装。
- OpenCV:
- 安装 uv(可选):项目推荐使用 uv 来管理 Python 环境。如果使用 uv,可以通过以下命令运行项目:
uv run tracker.py -f square_motion.mp4
(二)运行步骤
- 下载项目代码:
- 从 GitHub 仓库 下载代码。
- 下载项目中提供的示例视频文件(如
square_motion.mp4)。
- 运行脚本:
- 如果安装了 uv,直接运行:
uv run tracker.py -f square_motion.mp4 - 如果未安装 uv,可以通过以下命令运行:
python tracker.py -f square_motion.mp4
- 如果安装了 uv,直接运行:
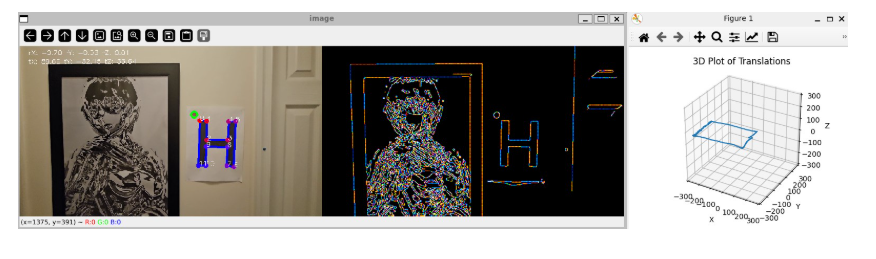
- 观察输出结果:
- 程序会实时显示视频帧,并绘制符号的轮廓和定位结果。
- 输出的旋转矩阵和平移矩阵将显示在终端中。
(三)常见问题及解决方法
- 相机内参矩阵问题:
- 如果使用不同的相机,需要重新标定相机内参矩阵。可以参考 OpenCV 的 相机标定教程。
- 轮廓检测失败:
- 如果轮廓检测失败,可能是由于符号的边缘不够清晰。可以尝试调整高斯模糊的参数或 Canny 边缘检测的阈值。
- 单应性矩阵计算失败:
- 如果
findHomography函数返回错误,可能是由于输入的轮廓点数量不足或质量不佳。可以检查轮廓筛选条件是否过于严格。
- 如果
- 运行速度慢:
- 如果程序运行速度较慢,可以尝试降低视频帧率或分辨率,或者优化代码中的计算步骤。
四、相关研究背景
OpenCV_Position 的核心算法基于单应性矩阵的计算和分解,这一技术在计算机视觉领域有着广泛的研究背景。以下是一些相关的研究方向和经典论文:
(一)单应性矩阵的计算
单应性矩阵的计算通常基于特征点匹配。经典的算法包括 RANSAC(随机抽样一致性)算法,用于鲁棒地估计单应性矩阵。相关论文可以参考:
- Fischler, M. A., & Bolles, R. C. (1981). Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography. Communications of the ACM, 24(6), 381-395.
(二)单应性矩阵的分解
单应性矩阵的分解是将单应性矩阵分解为旋转矩阵和平移矩阵的过程。这一技术在机器人视觉和增强现实领域有着重要应用。相关论文可以参考:
- Zhang, Z. (2000). A flexible new technique for camera calibration. IEEE Transactions on Pattern Analysis and Machine Intelligence, 22(11), 1330-1334.
(三)相机标定
相机标定是计算相机内参矩阵的过程,是计算机视觉中的基础任务。OpenCV 提供了完整的标定工具,其算法基于 Zhang 的标定方法。相关论文可以参考:
- Zhang, Z. (2000). A flexible new technique for camera calibration. IEEE Transactions on Pattern Analysis and Machine Intelligence, 22(11), 1330-1334.
五、总结
OpenCV_Position 是一个简单而实用的相机定位项目,通过单应性矩阵的计算和分解,实现了从视频流中推断相机位置的功能。该项目代码清晰易懂,适合初学者学习和实践。通过本文的介绍,你已经了解了 OpenCV_Position 的技术原理、实战运行方式、常见问题及解决方法,以及相关研究背景。希望本文能够帮助你更好地理解和使用 OpenCV_Position,开启你的计算机视觉之旅。
相关文章:
【计算机视觉】OpenCV项目实战:OpenCV_Position 项目深度解析:相机定位技术
OpenCV_Position 项目深度解析:基于 OpenCV 的相机定位技术 一、项目概述二、技术原理(一)单应性矩阵(Homography)(二)算法步骤(三)相机内参矩阵 三、项目实战运行&#…...
LAMMPS分子动力学基于周期扰动法的黏度计算
关键词:黏度,周期扰动法,SPC/E水分子,分子动力学,lammps 目前分子动力学计算黏度主要有以下方法:(1)基于 Green - Kubo 关系的方法。从微观角度出发,利用压力张量自相关函数积分计算…...
unity通过transform找子物体只能找子级
unity通过transform找子物体只能找子级,孙级以及更低级别都找不到,只能找到自己的下一级 如果要获取孙级以下的物体,最快的方法还是直接public挂载...
ThinkPad T440P如何从U盘安装Ubuntu24.04系统
首先制作一个安装 U 盘。我使用的工具是 Rufus ,它的官网是 rufus.ie ,去下载最新版就可以了。直接打开这个工具,选择自己从ubuntu官网下载Get Ubuntu | Download | Ubuntu的iso镜像制作U盘安装包即可。 其次安装之前,还要对 Thi…...

PostgreSQL给新用户授权select角色
✅ 切换到你的数据库并以超级用户登录(例如 postgres): admin#localhost: ~$ psql -U postgres -d lily✅ 创建登录的账号机密吗 lily> CREATE USER readonly_user WITH PASSWORD xxxxxxxxxxx; ✅ 确认你授予了这个表的读取权限…...
嵌入式开发学习(阶段二 C语言基础)
C语言:第05天笔记 内容提要 分支结构 条件判断用if语句实现分支结构用switch语句实现分支结构 分支结构 条件判断 条件判断:根据某个条件成立与否,决定是否执行指定的操作。 条件判断的结果是逻辑值,也就是布尔类型值&#…...

【RAG技术全景解读】从原理到工业级应用实践
目录 🌟 前言🏗️ 技术背景与价值🚨 当前技术痛点🛠️ 解决方案概述👥 目标读者说明 🔍 一、技术原理剖析📊 核心概念图解💡 核心作用讲解⚙️ 关键技术模块说明🔄 技术选…...
从人体姿态到机械臂轨迹:基于深度学习的Kinova远程操控系统架构解析
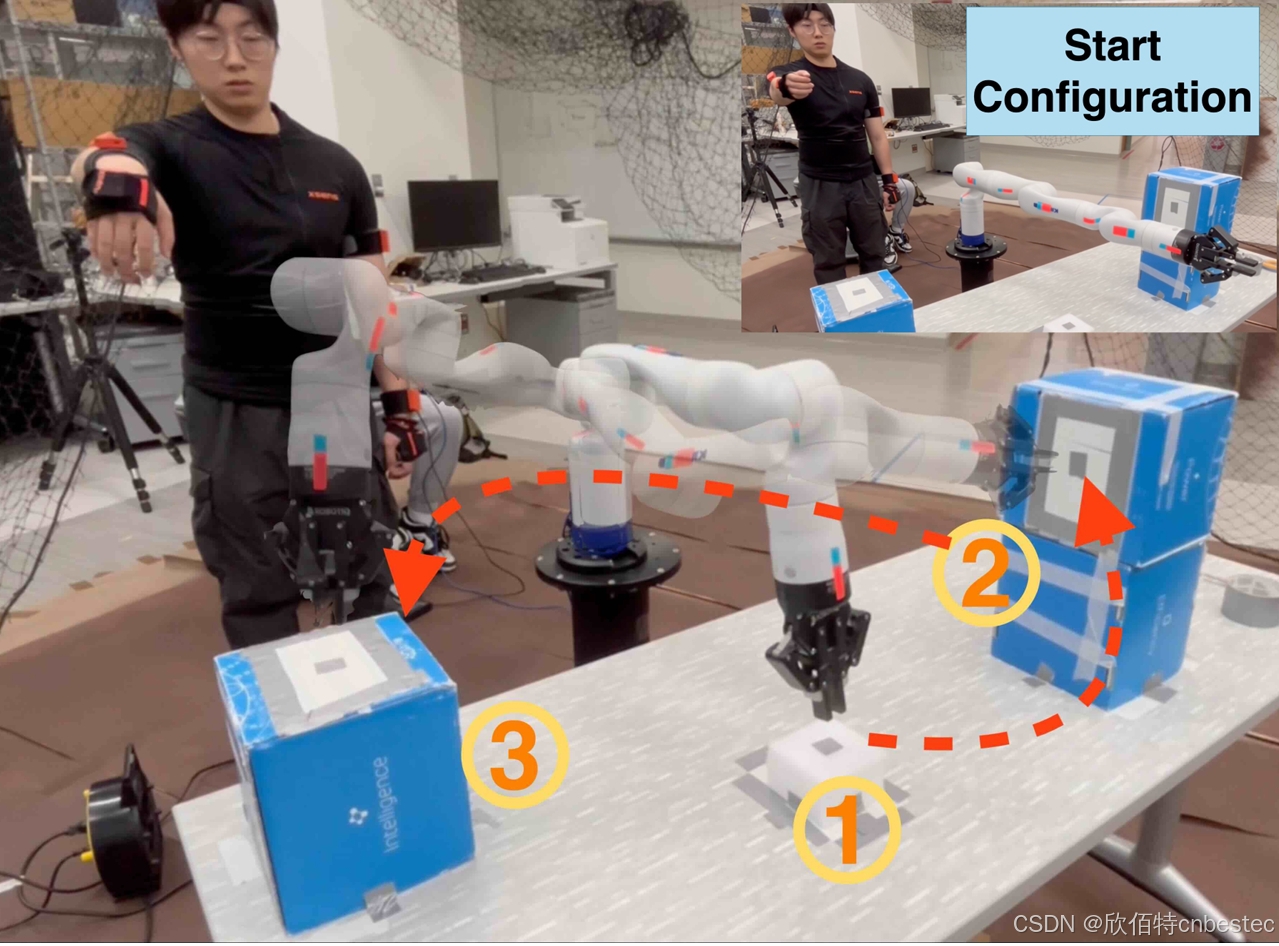
在工业自动化、医疗辅助、灾难救援与太空探索等前沿领域,Kinova轻型机械臂凭借7自由度关节设计和出色负载能力脱颖而出。它能精准完成物体抓取、复杂装配和精细操作等任务。然而,实现人类操作者对Kinova机械臂的直观高效远程控制一直是技术难题。传统远程…...
NX949NX952美光科技闪存NX961NX964
NX949NX952美光科技闪存NX961NX964 在半导体存储领域,美光科技始终扮演着技术引领者的角色。其NX系列闪存产品线凭借卓越的性能与创新设计,成为数据中心、人工智能、高端消费电子等场景的核心组件。本文将围绕NX949、NX952、NX961及NX964四款代表性产品…...

【Bootstrap V4系列】学习入门教程之 组件-输入组(Input group)
Bootstrap V4系列 学习入门教程之 组件-输入组(Input group) 输入组(Input group)Basic example一、Wrapping 包装二、Sizing 尺寸三、Multiple addons 多个插件四、Button addons 按钮插件五、Buttons with dropdowns 带下拉按钮…...
VS “筛选器/文件夹”
每天学习一个VS小技巧: 我在VS创建筛选器的时候,想要想要同步计算机上的文件目录,但是发现并未 同步。 例如我在这儿创建了一个筛选器IoManager 但是在UI这个文件夹里并未创建对应的IoManager文件夹 我右击也没有打开文件所在位置 然后我…...

RAG与语义搜索:让大模型成为测试工程师的智能助手
引言 AI大模型风头正劲,自动生成和理解文本的能力让无数行业焕发新生。测试工程师也不例外——谁不想让AI自动“看懂需求、理解接口、生成用例”?然而,很多人发现:直接丢问题给大模型,答案貌似“懂行”,细…...
)
从 JMS 到 ActiveMQ:API 设计与扩展机制分析(三)
三、ActiveMQ API 设计解析 (一)对 JMS API 的实现与扩展 ActiveMQ 作为 JMS 规范的一种实现,全面且深入地实现了 JMS API,确保了其在 Java 消息服务领域的兼容性和通用性。在核心接口实现方面,ActiveMQ 对 JMS 的 C…...
powerbuilder9.0中文版
经常 用这个版本号写小软件,非常喜欢这个开发软件 . powerbuilder9.0 非常的小巧,快捷,功能强大,使用方便. 我今天用软件 自己汉化了一遍,一些常用的界面都已经翻译成中文。 我自己用的,以后有什么界面需要翻译,再更新一下。 放在这里留个…...

小程序消息订阅的整个实现流程
以下是微信小程序消息订阅的完整实现流程,分为 5个核心步骤 和 3个关键注意事项: 一、消息订阅完整流程 步骤1:配置订阅消息模板 登录微信公众平台进入「功能」→「订阅消息」选择公共模板或申请自定义模板,获取模板IDÿ…...

互联网大厂Java求职面试实战:Spring Boot微服务与数据库优化详解
💪🏻 1. Python基础专栏,基础知识一网打尽,9.9元买不了吃亏,买不了上当。 Python从入门到精通 😁 2. 毕业设计专栏,毕业季咱们不慌忙,几百款毕业设计等你选。 ❤️ 3. Python爬虫专栏…...

基于C语言的TCP通信测试程序开发指南
一、TCP通信基础原理 1.1 通信流程概述 TCP通信采用客户端-服务器模型,核心流程如下: 服务器端: 创建套接字(Socket) 绑定地址和端口(Bind) 开始监听(Listen) 接受…...

Git 分支指南
什么是 Git 分支? Git 分支是仓库内的独立开发线,你可以把它想象成一个单独的工作空间,在这里你可以进行修改,而不会影响主分支(或 默认分支)。分支允许开发者在不影响项目实际版本的情况下,开…...

教育系统源码如何支持白板直播与刷题功能?功能开发与优化探索
很多行业内同学疑问,如何在教育系统源码中支持白板直播和刷题功能?本篇文章,小编将从功能设计、技术实现到性能优化,带你全面了解这个过程。 一、白板直播功能的核心需求与技术挑战 实时交互与同步性 白板直播的核心是“实时性”。…...

SSM框架整合MyBatis-Plus的步骤和简单用法示例
以下是 SSM框架整合MyBatis-Plus的步骤 和 简单用法示例: 一、SSM整合MyBatis-Plus步骤 1. 添加依赖(Maven) <?xml version"1.0" encoding"UTF-8"?> <project xmlns"http://maven.apache.org/POM/4.0.…...

【LeetCode 热题 100】206. 反转链表
📌 难度:简单 📚 标签:链表、双指针、迭代、递归 🔗 题目链接(LeetCode CN) 🧩 一、题目描述 给你单链表的头节点 head,请你反转链表,并返回反转后的链表。 ✅…...

centos8.5.2111 更换阿里云源
使用前提是服务器可以连接互联网 1、备份现有软件配置文件 cd /etc/yum.repos.d/ mkdir backup mv CentOS-* backup/ 2、下载阿里云的软件配置文件 wget -O /etc/yum.repos.d/CentOS-Base.repo https://mirrors.aliyun.com/repo/Centos-vault-8.5.2111.repo 3、清理并重建…...
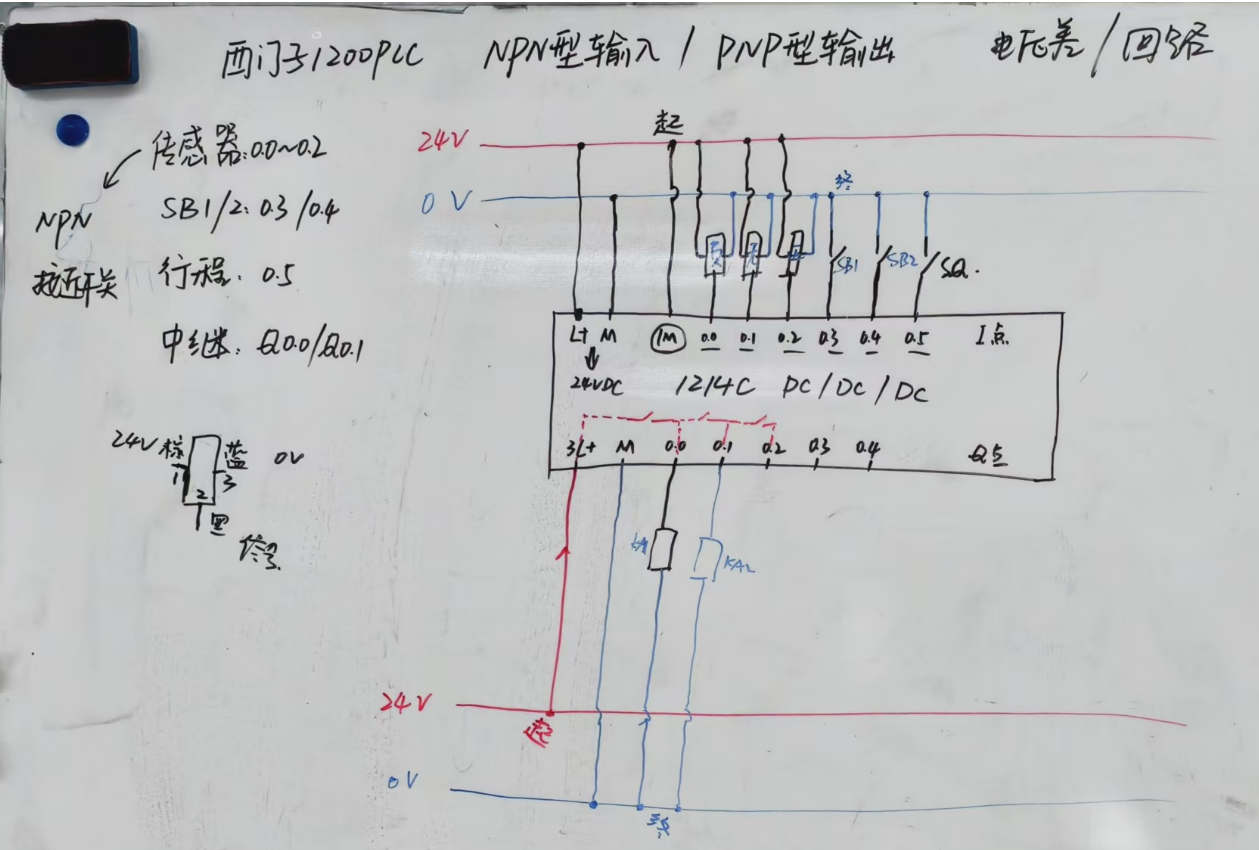
再度深入理解PLC的输入输出接线
本文再次重新梳理: 两线式/三线式传感器的原理及接线、PLC的输入和输出接线,深入其内部原理,按照自己熟悉的方式去理解该知识 在此之前,需要先统一几个基础知识点: 在看任何电路的时候,需要有高低电压差&…...
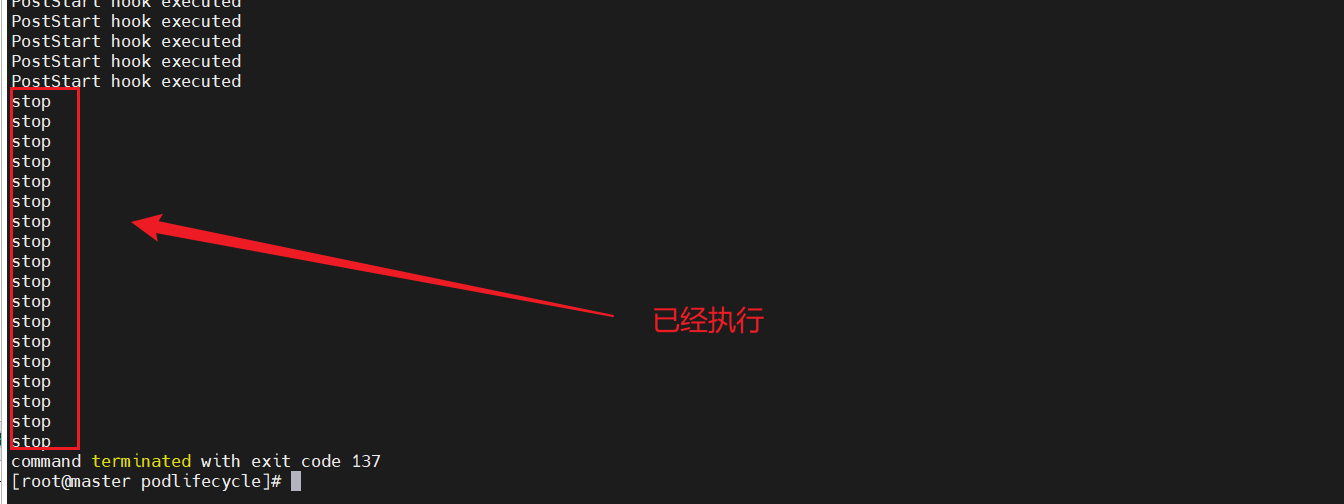
k8s(11) — 探针和钩子
钩子和探针的区别: 在 Kubernetes(k8s)中,钩子(Hooks)和探针(Probes)是保障应用稳定运行的重要机制,不过它们的用途和工作方式存在差异,以下为你详细介绍&…...

使用jmeter对数据库进行压力测试
🍅 点击文末小卡片 ,免费获取软件测试全套资料,资料在手,涨薪更快 前言 很多人提到 jmeter时,只会说到jmeter进行接口自动化或接口性能测试,其实jmeter还能对数据库进行自动化操作。个人常用的场景有以下&…...

Scala与Go的异同教程
当瑞士军刀遇到电锯:Scala vs Go的相爱相杀之旅 各位准备秃头的程序猿们(放心,用Go和Scala不会加重你的发际线问题),今天我们来聊聊编程界的"冰与火之歌"——Scala和Go的异同。准备好瓜子饮料,我…...

LeetCode 热题 100 138. 随机链表的复制
LeetCode 热题 100 | 138. 随机链表的复制 大家好,今天我们来解决一道经典的链表问题——随机链表的复制。这道题在 LeetCode 上被标记为中等难度,要求深拷贝一个带有随机指针的链表。 问题描述 给你一个长度为 n 的链表,每个节点包含一个额…...

Kubernetes生产实战(十四):Secret高级使用模式与安全实践指南
一、Secret核心类型解析 类型使用场景自动管理机制典型字段Opaque (默认)自定义敏感数据需手动创建data字段存储键值对kubernetes.io/dockerconfigjson私有镜像仓库认证kubelet自动更新.dockerconfigjsonkubernetes.io/tlsTLS证书管理Cert-Manager可自动化tls.crt/tls.keykube…...
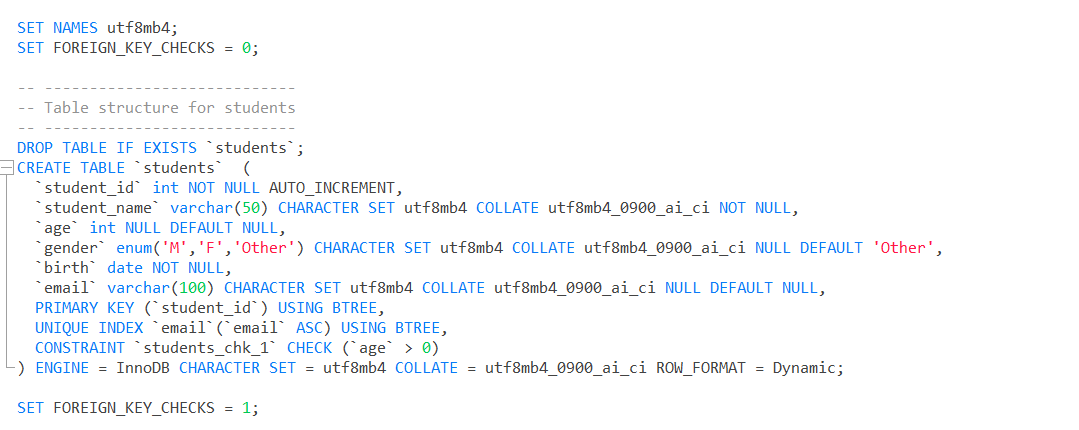
05 mysql之DDL
一、SQL的四个分类 我们通常可以将 SQL 分为四类,分别是: DDL(数据定义语言)、DML(数据操作语言)、 DCL(数据控制语言)和 TCL(事务控制语言)。 DDL 用于创建…...
电池热管理CFD解决方案,为新能源汽车筑安全防线
在全球能源结构加速转型的大背景下,新能源汽车产业异军突起,成为可持续发展的重要驱动力。而作为新能源汽车 “心脏” 的电池系统,其热管理技术的优劣,直接决定了车辆的安全性、续航里程和使用寿命。电池在充放电过程中会产生大量…...