STM32控制电机
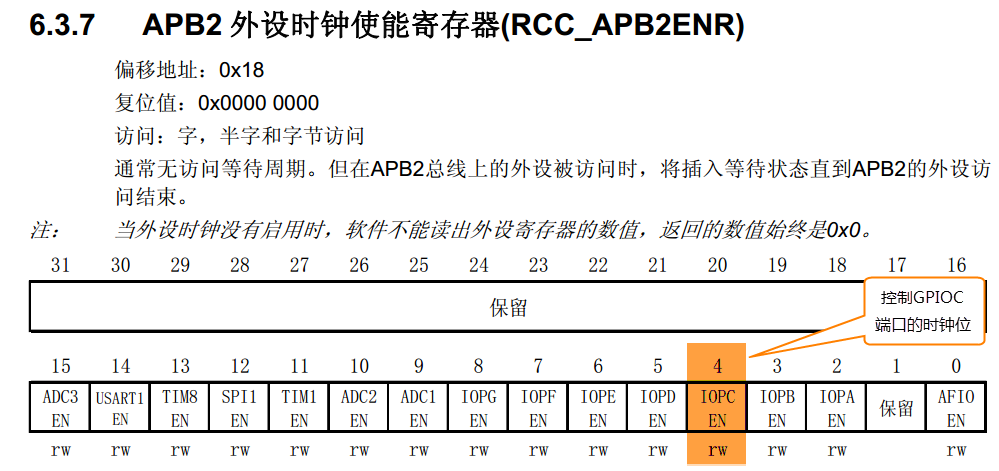
初始化时钟:在 STM32 的程序中,初始化系统时钟,一般会使用 RCC(Reset and Clock Control)相关函数来配置时钟。例如,对于 STM32F103 系列,可能会使用 RCC_APB2PeriphClockCmd 函数来使能 GPIO 和电机驱动芯片相关的时钟。
初始化 GPIO 引脚:配置连接到电机驱动芯片的 GPIO 引脚为输出模式。
电机正转控制:通过设置 GPIO 引脚的电平来控制电机正转。
电机反转控制:改变方向控制端的电平,使电机反转。
电机停止控制:关闭电机驱动芯片的使能端,使电机停止转动。
代码如下:
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** <h2><center>© Copyright (c) 2025 STMicroelectronics.* All rights reserved.</center></h2>** This software component is licensed by ST under BSD 3-Clause license,* the "License"; You may not use this file except in compliance with the* License. You may obtain a copy of the License at:* opensource.org/licenses/BSD-3-Clause********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes *//* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
#include "stdio.h"
/* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*/TIM_HandleTypeDef htim3;UART_HandleTypeDef huart1;/* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_TIM3_Init(void);
static void MX_USART1_UART_Init(void);
static void MX_NVIC_Init(void);
/* USER CODE BEGIN PFP */#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{ int handle; }; FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{ x = x;
}
//重定义fputc函数 int fputc(int ch, FILE *f)
{uint8_t temp[1] = {ch};HAL_UART_Transmit(&huart1, temp, 1, 1000); // huart1是串口1,如果使用其他串口需要更改这个变量return ch;
}
#endif
/* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */uint16_t SinWave[1000];uint16_t index_test = 0;/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_TIM3_Init();MX_USART1_UART_Init();/* Initialize interrupts */MX_NVIC_Init();/* USER CODE BEGIN 2 */printf("init hal pwm test.");int i = 0;for(uint16_t i=0;i<1000;i++){SinWave[i]=500*sin(2*3.1415926f*i/1000)+500;}//设置占空比 for(uint16_t i=0;i<1000;i++){TIM3->CCR1=500;TIM3->CCR2=500;HAL_Delay(1);} HAL_GPIO_WritePin(GPIOA,GPIO_PIN_7,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOA,GPIO_PIN_6,GPIO_PIN_RESET);HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1); //使能定时器4通道1HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_2); //使能定时器4通道2while(1){index_test++;if(index_test < 1000){HAL_TIM_PWM_Stop(&htim3, TIM_CHANNEL_1); //使能定时器4通道1HAL_TIM_PWM_Stop(&htim3, TIM_CHANNEL_2); //使能定时器4通道1HAL_GPIO_WritePin(GPIOA,GPIO_PIN_7,GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOA,GPIO_PIN_6,GPIO_PIN_SET);HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1); //使能定时器4通道1HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_2); //使能定时器4通道2HAL_Delay(1); printf("反转");} else {if(index_test == 2000){index_test =0;}HAL_TIM_PWM_Stop(&htim3, TIM_CHANNEL_1); //使能定时器4通道1HAL_TIM_PWM_Stop(&htim3, TIM_CHANNEL_2); //使能定时器4通道1HAL_GPIO_WritePin(GPIOA,GPIO_PIN_7,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOA,GPIO_PIN_6,GPIO_PIN_RESET);HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1); //使能定时器4通道1HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_2); //使能定时器4通道2HAL_Delay(1);printf("正转");}} /* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */// for(index = 0; index < 10; index++)
// {/* USER CODE END WHILE *//* USER CODE BEGIN 3 */
// }//#include "string.h"
//while(1)
//{// printf("TIM3= %d\r\n",TIM3->CNT);
//
//
//}printf("done");/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};RCC_PeriphCLKInitTypeDef PeriphClkInitStruct = {0};/** Supply configuration update enable*/HAL_PWREx_ConfigSupply(PWR_LDO_SUPPLY);/** Configure the main internal regulator output voltage*/__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {}/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLM = 1;RCC_OscInitStruct.PLL.PLLN = 100;RCC_OscInitStruct.PLL.PLLP = 2;RCC_OscInitStruct.PLL.PLLQ = 2;RCC_OscInitStruct.PLL.PLLR = 2;RCC_OscInitStruct.PLL.PLLRGE = RCC_PLL1VCIRANGE_3;RCC_OscInitStruct.PLL.PLLVCOSEL = RCC_PLL1VCOWIDE;RCC_OscInitStruct.PLL.PLLFRACN = 0;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2|RCC_CLOCKTYPE_D3PCLK1|RCC_CLOCKTYPE_D1PCLK1;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.SYSCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.AHBCLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB3CLKDivider = RCC_APB3_DIV2;RCC_ClkInitStruct.APB1CLKDivider = RCC_APB1_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_APB2_DIV2;RCC_ClkInitStruct.APB4CLKDivider = RCC_APB4_DIV2;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}PeriphClkInitStruct.PeriphClockSelection = RCC_PERIPHCLK_USART1;PeriphClkInitStruct.Usart16ClockSelection = RCC_USART16CLKSOURCE_D2PCLK2;if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInitStruct) != HAL_OK){Error_Handler();}
}/*** @brief NVIC Configuration.* @retval None*/
static void MX_NVIC_Init(void)
{/* TIM3_IRQn interrupt configuration */HAL_NVIC_SetPriority(TIM3_IRQn, 0, 0);HAL_NVIC_EnableIRQ(TIM3_IRQn);
}/*** @brief TIM3 Initialization Function* @param None* @retval None*/
static void MX_TIM3_Init(void)
{/* USER CODE BEGIN TIM3_Init 0 *//* USER CODE END TIM3_Init 0 */TIM_ClockConfigTypeDef sClockSourceConfig = {0};TIM_MasterConfigTypeDef sMasterConfig = {0};TIM_OC_InitTypeDef sConfigOC = {0};/* USER CODE BEGIN TIM3_Init 1 *//* USER CODE END TIM3_Init 1 */htim3.Instance = TIM3;htim3.Init.Prescaler = 400-1;htim3.Init.CounterMode = TIM_COUNTERMODE_UP;htim3.Init.Period = 1000-1;htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;if (HAL_TIM_Base_Init(&htim3) != HAL_OK){Error_Handler();}sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK){Error_Handler();}if (HAL_TIM_OC_Init(&htim3) != HAL_OK){Error_Handler();}sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK){Error_Handler();}sConfigOC.OCMode = TIM_OCMODE_TOGGLE;sConfigOC.Pulse = 0;sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;if (HAL_TIM_OC_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1) != HAL_OK){Error_Handler();}sConfigOC.OCPolarity = TIM_OCPOLARITY_LOW;if (HAL_TIM_OC_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_2) != HAL_OK){Error_Handler();}/* USER CODE BEGIN TIM3_Init 2 *//* USER CODE END TIM3_Init 2 */HAL_TIM_MspPostInit(&htim3);}/*** @brief USART1 Initialization Function* @param None* @retval None*/
static void MX_USART1_UART_Init(void)
{/* USER CODE BEGIN USART1_Init 0 *//* USER CODE END USART1_Init 0 *//* USER CODE BEGIN USART1_Init 1 *//* USER CODE END USART1_Init 1 */huart1.Instance = USART1;huart1.Init.BaudRate = 115200;huart1.Init.WordLength = UART_WORDLENGTH_8B;huart1.Init.StopBits = UART_STOPBITS_1;huart1.Init.Parity = UART_PARITY_NONE;huart1.Init.Mode = UART_MODE_TX_RX;huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart1.Init.OverSampling = UART_OVERSAMPLING_16;huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;huart1.Init.ClockPrescaler = UART_PRESCALER_DIV1;huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;if (HAL_UART_Init(&huart1) != HAL_OK){Error_Handler();}if (HAL_UARTEx_SetTxFifoThreshold(&huart1, UART_TXFIFO_THRESHOLD_1_8) != HAL_OK){Error_Handler();}if (HAL_UARTEx_SetRxFifoThreshold(&huart1, UART_RXFIFO_THRESHOLD_1_8) != HAL_OK){Error_Handler();}if (HAL_UARTEx_DisableFifoMode(&huart1) != HAL_OK){Error_Handler();}/* USER CODE BEGIN USART1_Init 2 *//* USER CODE END USART1_Init 2 */}/*** @brief GPIO Initialization Function* @param None* @retval None*/
static void MX_GPIO_Init(void)
{GPIO_InitTypeDef GPIO_InitStruct = {0};/* GPIO Ports Clock Enable */__HAL_RCC_GPIOH_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET);/*Configure GPIO pin : PA0 */GPIO_InitStruct.Pin = GPIO_PIN_0;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;GPIO_InitStruct.Alternate = GPIO_AF1_TIM2;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);/*Configure GPIO pin : PA4 */GPIO_InitStruct.Pin = GPIO_PIN_4;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);}/* USER CODE BEGIN 4 */
//void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
//{
// if(huart->Instance == USART1)
// {
// HAL_UART_Receive_IT(&huart1,(uint8_t*)&rx,sizeof(rx));
// }
//}
/* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state *//* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT *//************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/相关文章:

STM32控制电机
初始化时钟:在 STM32 的程序中,初始化系统时钟,一般会使用 RCC(Reset and Clock Control)相关函数来配置时钟。例如,对于 STM32F103 系列,可能会使用 RCC_APB2PeriphClockCmd 函数来使能 GPIO 和…...
)
力扣刷题(第二十九天)
灵感来源 - 保持更新,努力学习 - python脚本学习 验证回文串 解题思路 验证回文串的核心在于判断一个字符串是否从前向后和从后向前读都是一样的。不过,题目通常会有两个主要限制条件: 忽略大小写:比如 "A man" …...

chrome 浏览器插件 myTools, 日常小工具。
1. 起因, 目的: 比如,chatgpt, google, 打开网页,就能直接输入文字,然后 grok 就不行,必须用鼠标点一下,才能输入文字。 对我而言,是个痛点!写个插件,自动点…...

Leaflet使用SVG创建动态Legend
接前一篇文章,前一篇文章我们使用 SVG 创建了带有动态文字的图标,今天再看看怎样在地图上根据动态图标生成相关的legend,当然这里也还是使用了 SVG 来生成相关颜色的 legend。 看下面的代码,生成了一个 svg 节点,其中…...
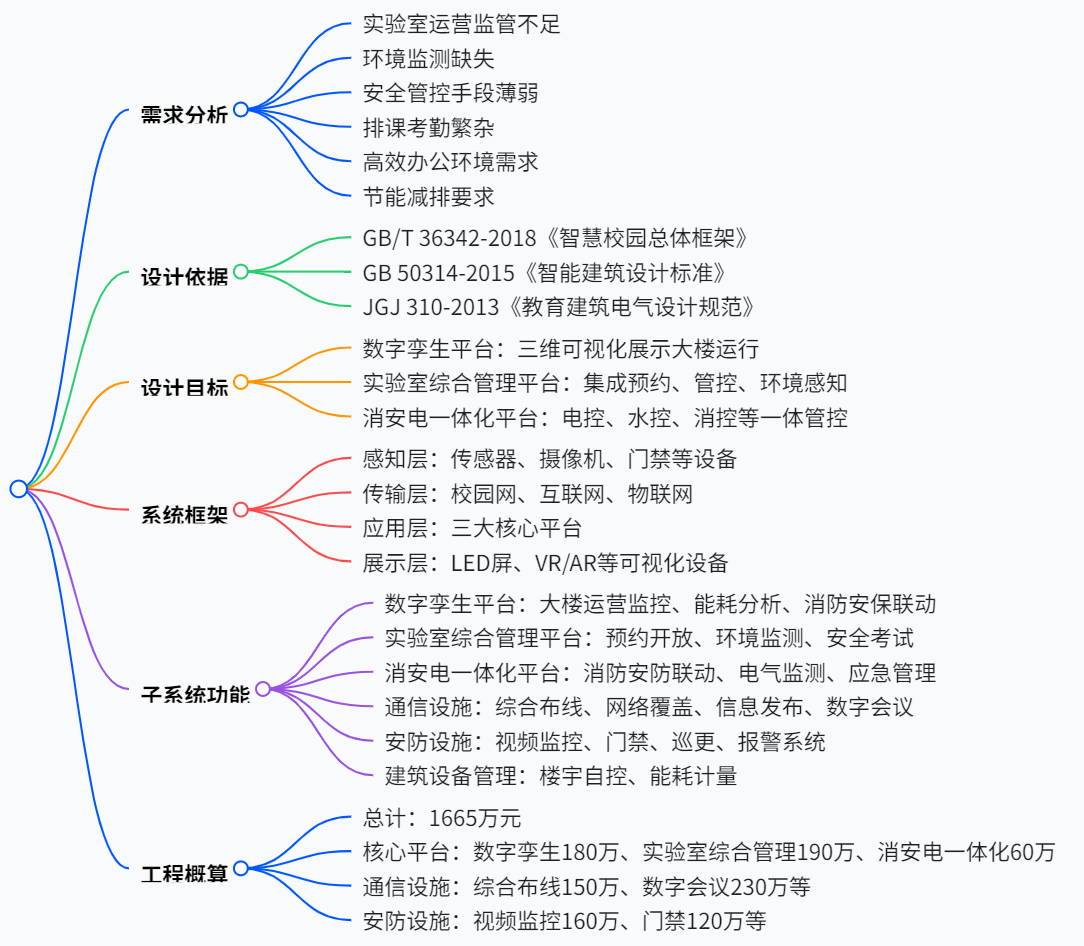
智慧校园(含实验室)智能化专项汇报方案
该方案聚焦智慧校园(含实验室)智能化建设,针对传统实验室在运营监管、环境监测、安全管控、排课考勤等方面的问题,依据《智慧校园总体框架》等标准,设计数字孪生平台、实验室综合管理平台、消安电一体化平台三大核心平台,涵盖通信、安防、建筑设备管理等设施,涉及 395 个…...
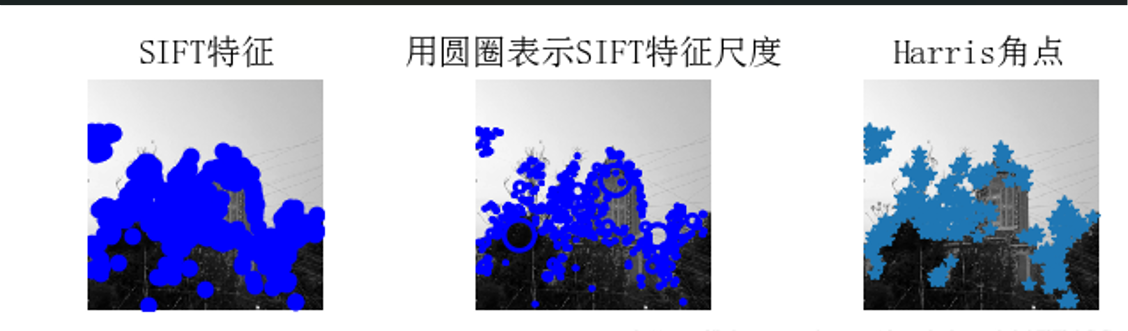
第三十四节:特征检测与描述-SIFT/SURF 特征 (专利算法)
一、特征检测:计算机视觉的基石 在计算机视觉领域中,特征检测与描述是实现图像理解的核心技术。就像人类通过识别物体边缘、角点等特征来认知世界,算法通过检测图像中的关键特征点来实现: 图像匹配与拼接 物体识别与跟踪 三维重建 运动分析 其中,SIFT(Scale-Invariant F…...

ORACLE数据库实例报错ORA-00470: LGWR process terminated with error宕机问题分析报告
服务概述 10月21号03:22分,BOSS数据库实例发生异常宕机;工程师及时响应此问题并对此故障原因进行分析及相关建议,详细的故障情况及相关日志、TRACE文件的分析及总结、建议,请参阅本文档。 hzboss数据库实例宕机分析 4.1 数据库层面日志的分…...
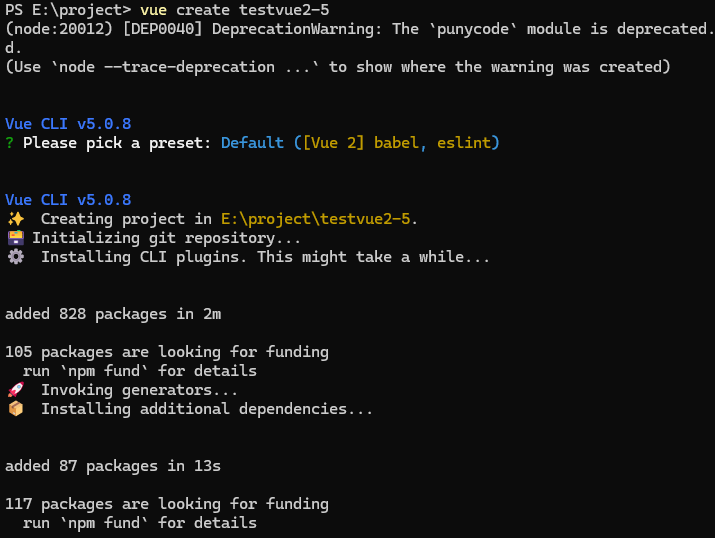
【前端优化】vue2 webpack4项目升级webpack5,大大提升运行速度
记录一下过程 手里有个老项目,vue2webpack4 项目很大,每次运行、运行都要将近10分钟 现在又要往里面写很多东西,再不优化,开发着会更难受,所以决定先将它升级至webpack5 最初失败的尝试 直接在项目里安装了webpack5 但…...
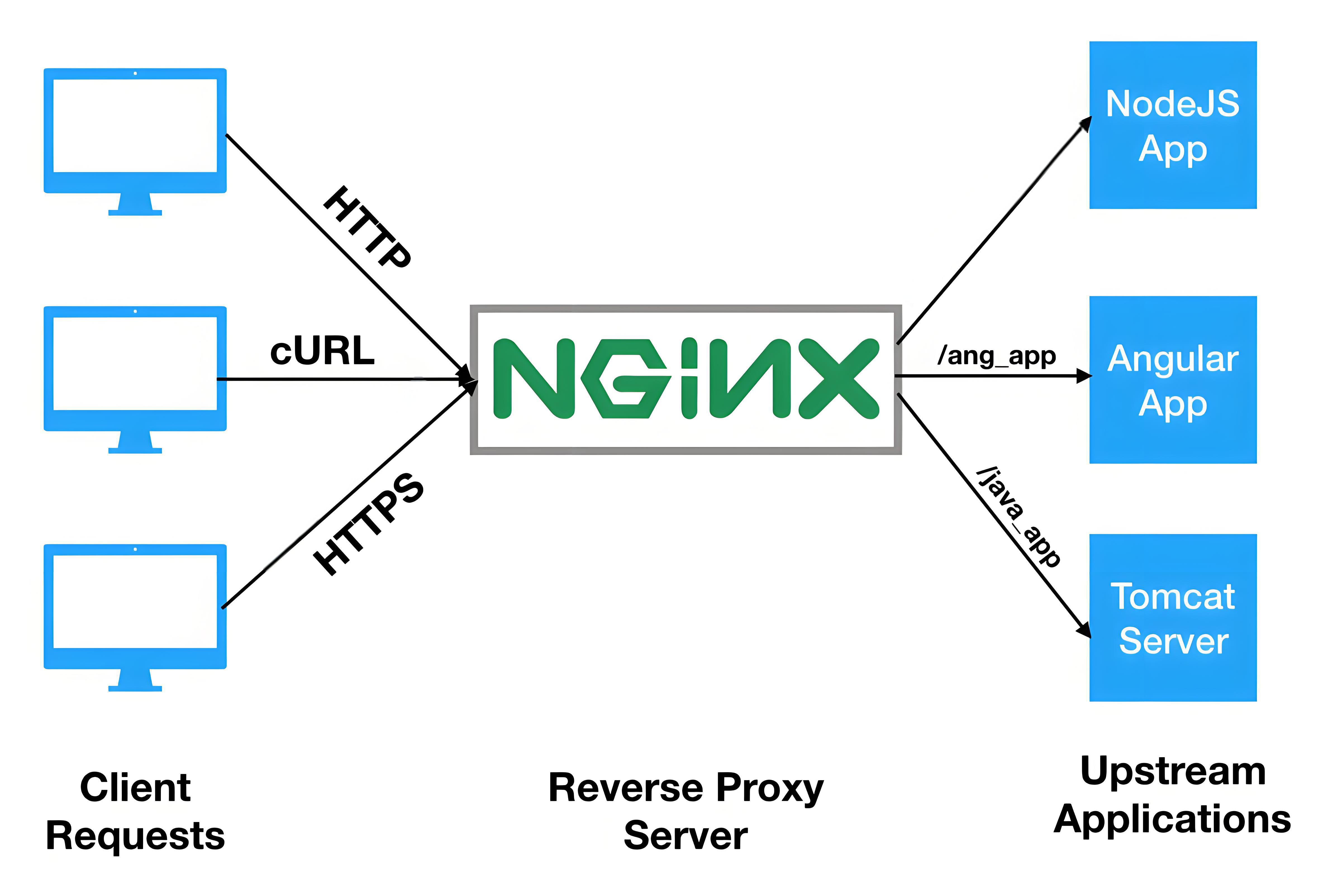
Nginx应用场景详解与配置指南
1. 什么是Nginx? Nginx(发音为"engine-x")是一个高性能的HTTP和反向代理服务器,也是一个IMAP/POP3/SMTP代理服务器。它以高性能、稳定性、丰富的功能集、简单的配置和低资源消耗而闻名。 2. Nginx的主要应用场景 2.1 …...
vue2 切换主题色以及单页面好使方法
今天要新增一个页面要根据不同公司切换不同页面主题色,一点一点来,怎么快速更改 el-pagination 分页组件主题色。 <el-pagination :page-size"pageSize" :pager-count"pageCount"layout"sizes, prev, pager, next, jumper,…...
)
React学习———CSS Modules(样式模块化)
CSS Modules CSS Modules(样式模块化)是一种用于模块化和局部作用域化CSS样式的技术,让CSS只在当前组件内生效,避免全局样式冲突的技术方案 工作原理 文件命名:通常以.module.css、.module.less、.module.scss等结尾…...

MCP 与 Cloudflare 的结合:网络安全的新高度
MCP 与 Cloudflare 的结合:网络安全的新高度 在数字化时代,网络安全已经不只是某些行业的“专属问题”,而是所有企业、个人都必须面对的核心挑战。从 DDoS 攻击、数据泄露,到身份盗用,每一种网络威胁都可能带来巨大的损失。而这时候,微软 MCP(Microsoft Cloud Platform…...

JavaScript入门【1】概述
1.JavaScript是什么? <font style"color:rgb(38,38,38);">Javascript (简称“JS”)是⼀种直译式脚本语⾔,⼀段脚本其实就是⼀系列指令,计算机通过这些指令来达成⽬标。它⼜是⼀种动态类型的编程语⾔。JS⽤来在⽹…...

PyQt5 的使用
PyQt5 是 Python 里基于 Qt 框架的 GUI 开发工具,能做桌面应用,跨平台(Windows/macOS/Linux 都能用)。你可能想知道:怎么开始用?有哪些核心组件?怎么写界面逻辑?别急,咱们…...

JavaScript【6】事件
1.概述: 在 JavaScript 中,事件(Event)是浏览器或 DOM(文档对象模型)与 JavaScript 代码之间交互的一种机制。它代表了在浏览器环境中发生的特定行为或者动作,比如用户点击鼠标、敲击键盘、页面…...
STM32F10xx 参考手册
6. 什么是寄存器 本章参考资料:《STM32F10xx 参考手册》、《STM32F10xx数据手册》、 学习本章时,配合《STM32F10xx 参考手册》“存储器和总线架构”及“通用I/O(GPIO)”章节一起阅读,效果会更佳,特别是涉及到寄存器说明的部分。…...

使用Docker部署Nacos
sudo systemctl start docker sudo systemctl enable docker docker --version 步骤 2: 拉取 Nacos Docker 镜像 拉取 Nacos 镜像: 你可以从 Docker Hub 上拉取官方的 Nacos 镜像,使用以下命令: docker pull nacos/nacos-server 这会从 …...

深度学习中ONNX格式的模型文件
一、模型部署的核心步骤 模型部署的完整流程通常分为以下阶段,用 “跨国旅行” 类比: 步骤类比解释技术细节1. 训练模型学会一门语言(如中文)用 PyTorch/TensorFlow 训练模型2. 导出为 ONNX翻译成国际通用语言(如英语…...
TIFS2024 | CRFA | 基于关键区域特征攻击提升对抗样本迁移性
Improving Transferability of Adversarial Samples via Critical Region-Oriented Feature-Level Attack 摘要-Abstract引言-Introduction相关工作-Related Work提出的方法-Proposed Method问题分析-Problem Analysis扰动注意力感知加权-Perturbation Attention-Aware Weighti…...

Redis 发布订阅模式深度解析:原理、应用与实践
在现代分布式系统架构中,实时消息传递机制扮演着至关重要的角色。Redis 作为一款高性能的内存数据库,其内置的发布订阅(Pub/Sub)功能提供了一种轻量级、高效的消息通信方案。本文将全面剖析 Redis 发布订阅模式,从其基本概念、工作原理到实际…...

环形缓冲区 ring buffer 概述
环形缓冲区 ring buffer 概述 1. 简介 环形缓冲区(ring buffer),是一种用于表示一个固定尺寸、头尾相连的缓冲区的数据结构,适合缓存数据流。也称作环形缓冲区(circular buffer),环形队列&…...
飞帆控件 post or get it when it has get
我在这里分享两个链接: post_get_it 设计 - 飞帆 有人看出来这个控件是干什么用吗? 控件的配置:...

SQL里where条件的顺序影响索引使用吗?
大家好,我是锋哥。今天分享关于【SQL里where条件的顺序影响索引使用吗?】面试题。希望对大家有帮助; SQL里where条件的顺序影响索引使用吗? 1000道 互联网大厂Java工程师 精选面试题-Java资源分享网 在 SQL 查询中,W…...
SAP学习笔记 - 开发豆知识02 - com.sap.cds.services.cds.CdsService 废止,那么用什么代替呢?
我看很多人代码里面用的都是这个CdsService类,可以自从2.0版本往上这个类就没了啊。 它的代替是什么呢?用的CqnService 那么怎么查的呢? 我也是下载好几个包,解压看,然后发现这里还可以直接看,挺方便的。…...

OpenResty 深度解析:构建高性能 Web 服务的终极方案
引言 openresty是什么?在我个人对它的理解来看相当于嵌入了lua的nginx; 我们在nginx中嵌入lua是为了不需要再重新编译,我们只需要重新修改lua脚本,随后重启即可; 一.lua指令序列 我们分别从初始化阶段,重写/访问阶段,内容阶段,日志…...

什么是路由器环回接口?
路由器环回接口(LoopbackInterface)是网络设备中的一种逻辑虚拟接口,不依赖物理硬件,但在网络配置和管理中具有重要作用。以下是其核心要点: 一、基本特性 1.虚拟性与稳定性 环回接口是纯软件实现的逻辑接口&#x…...

OpenHarmony:开源操作系统重塑产业数字化底座
OpenHarmony:开源操作系统重塑产业数字化底座 引言:当操作系统成为数字公共品 在万物智联时代,操作系统不再是科技巨头的专属领地。华为捐赠的OpenHarmony项目,正以开源协作模式重构操作系统产业格局。这个脱胎于商业版本的开源…...

【MySQL进阶】如何在ubuntu下安装MySQL数据库
前言 🌟🌟本期讲解关于如何在ubuntu环境下安装mysql的详细介绍~~~ 🌈感兴趣的小伙伴看一看小编主页:GGBondlctrl-CSDN博客 🔥 你的点赞就是小编不断更新的最大动力 dz…...

【数据结构】_二叉树
1.二叉树链式结构的实现 1.1 前置说明 在学习二叉树的基本操作前,需先要创建一棵二叉树,然后才能学习其相关的基本操作。由于现在大家对二叉树结构掌握还不够深入,为了降低大家学习成本,此处手动快速创建一棵简单的二叉树&#x…...

给图表组件上点“颜色” —— 我与 CodeBuddy 的合作记录
我正在参加CodeBuddy「首席试玩官」内容创作大赛,本文所使用的 CodeBuddy 免费下载链接:腾讯云代码助手 CodeBuddy - AI 时代的智能编程伙伴 前段时间,我在开发一个 Vue3 项目的时候,碰到了一个小小的挑战:我想做一个可…...