运动规划实战案例 | 图解基于状态晶格(State Lattice)的路径规划(附ROS C++/Python仿真)
目录
- 1 控制采样 vs 状态采样
- 2 State Lattice路径规划
- 2.1 算法流程
- 2.2 Lattice运动基元生成
- 2.3 几何代价函数
- 2.4 运动学约束启发式
- 3 算法仿真
- 3.1 ROS C++仿真
- 3.2 Python仿真
1 控制采样 vs 状态采样
控制采样的技术路线源自经典的运动学建模思想。这种方法将机器人的控制指令空间进行离散化,预设一组基础运动模式(如固定转向角、恒定速度等),通过前向积分生成候选路径。以差速驱动机器人为例,算法可能预设
- 左转30度
- 直行
- 右转30度
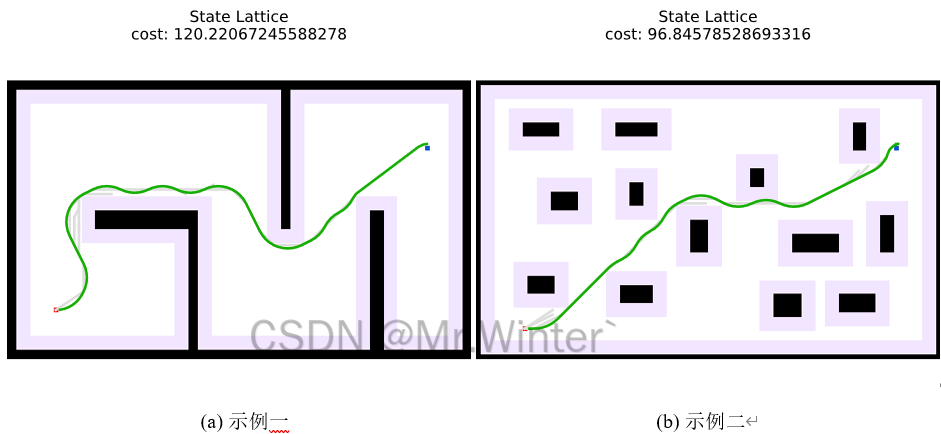
三种基础控制指令,在规划时将这些指令按不同时长组合,形成扇形展开的候选路径集,如下图(a)所示。这种方法的优势在于物理可解释性强,易于求解。但其局限性同样显著:当环境障碍复杂时,由于缺乏目标导向,规划效率较低
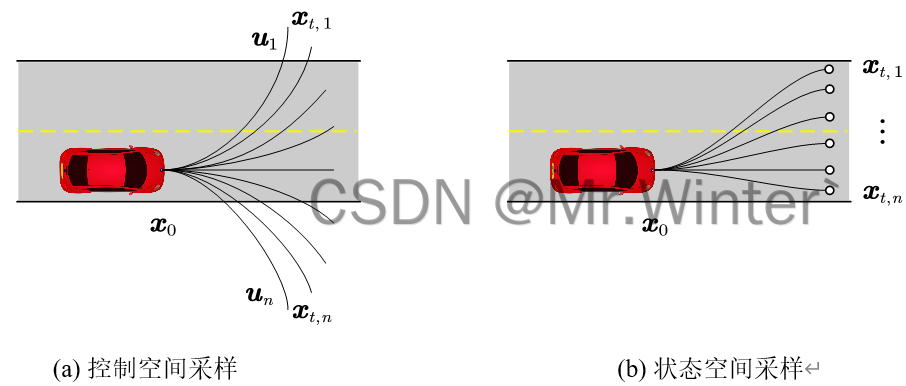
状态采样则直接在目标状态空间(如位置、朝向)中离散化采样点,通过最优控制或数值优化反向求解连接当前状态与目标状态的可行轨迹,如上图(b)所示。例如在自动驾驶场景中,算法可能在车辆前方50米处均匀采样多个目标位姿,再通过多项式曲线或回旋曲线连接起点与终点。这种方法的优势在于解空间覆盖度高,能够生成形态多样的候选路径,特别适合结构化道路中需要精确贴合车道线的场景。但代价是计算复杂度显著增加,反向轨迹求解可能涉及大量迭代优化,实时性面临挑战。
两种方法在工程实践中的博弈,折射出路径规划领域的核心矛盾——解空间完备性与计算效率的平衡。本节介绍的状态晶格State Lattice路径规划就属于状态空间采样类的方法,下面详细阐述
2 State Lattice路径规划
2.1 算法流程
先宏观地展示算法流程
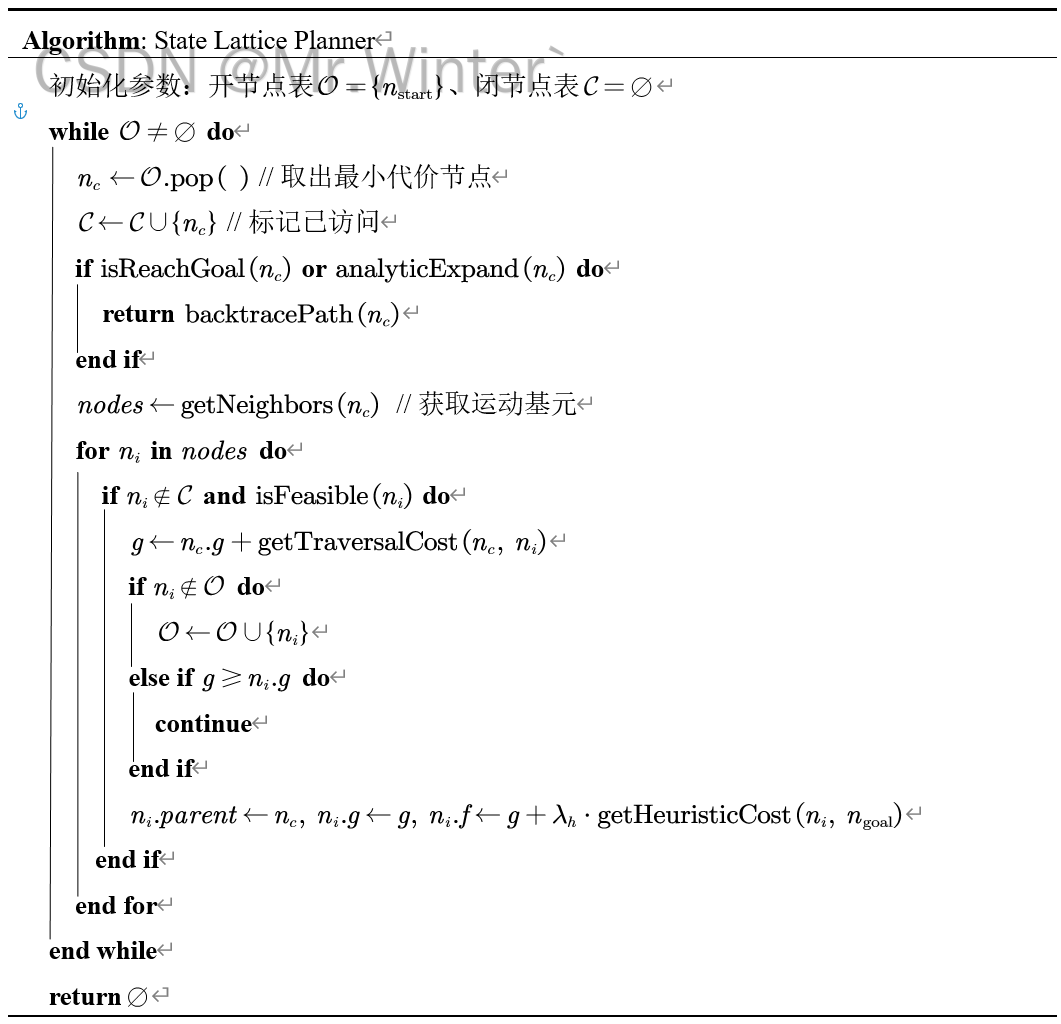
其中的核心概念总结如下:
- 状态晶格(State Lattice) 将机器人的状态空间(位置、方向等)离散化为一系列相连的状态点,形成网格状结构
- 开节点表(Open List) 存储待评估探索的节点集合,按照代价排序
- 闭节点表(Closed List) 存储已经评估处理过的节点集合
- 节点(Node) 表示状态空间中的一个点,包含位置、方向、代价等信息
- 运动基元(Motion Primitive) 预定义的合法移动方式,确保路径满足动力学约束
可以看到,State Lattice同样遵守A*算法框架,可以对比:
- 路径规划 | 图解A*、Dijkstra、GBFS算法的异同(附C++/Python/Matlab仿真)
- 路径规划 | 详解混合A*算法Hybrid A*(附ROS C++/Python/Matlab仿真)
不同在于,State Lattice规划器在状态空间采样一系列节点生成运动基元,而A*或混合A*算法则是在控制空间采样。那么,状态空间运动基元是如何生成的呢?
2.2 Lattice运动基元生成
设机器人状态空间为
s = [ x , y , θ ] T s=[x,y,\theta]^T s=[x,y,θ]T
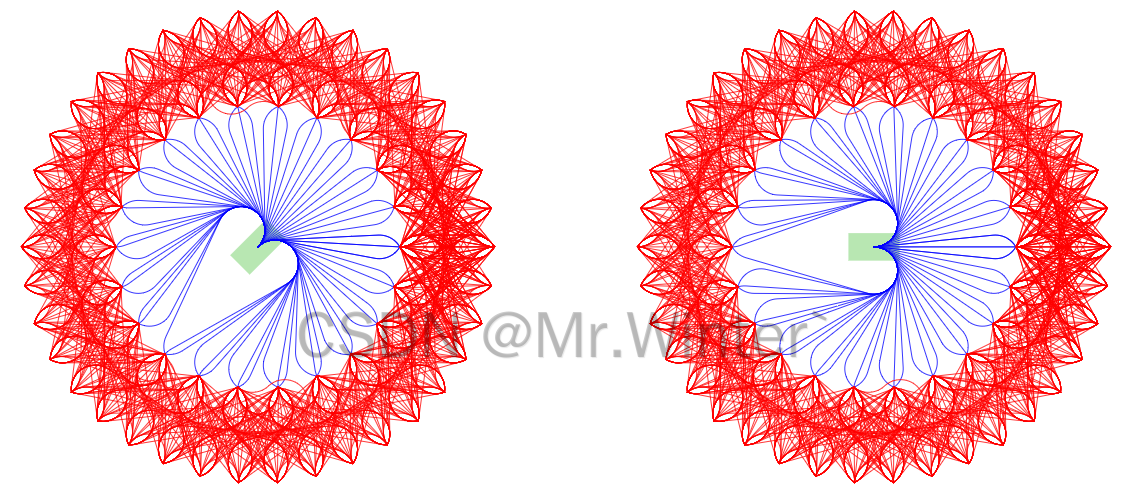
如下图所示,机器人用绿色矩形框表示,在圆周上等距离地采样一系列点作为状态采样点 [ x i , y i , θ i ] [x_i,y_i, \theta_i] [xi,yi,θi],问题转变为已知起始状态 [ x 0 , y 0 , θ 0 ] [x_0,y_0,\theta_0] [x0,y0,θ0]和各个终止状态 [ x i , y i , θ i ] [x_i,y_i, \theta_i] [xi,yi,θi],如何生成一条连接两个状态的运动学可行路径的问题,即如何生成下图所示的蓝色与红色路径
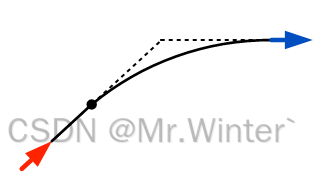
求解的方法有很多,例如转化为两点边值问题、最优控制优化问题等,但为了简明起见,本节介绍一种解析几何的方法。如下图所示,设首末方向向量交点为 P P P,首末端点分别为 A A A、 B B B,不失一般性假定 ∣ P A ∣ ≥ ∣ P B ∣ |PA|≥|PB| ∣PA∣≥∣PB∣,则在线段 P A PA PA上从 P P P出发截取 ∣ P B ∣ |PB| ∣PB∣长度的子线段 P C PC PC,以 B B B和 C C C为两个端点构造圆弧,产生由 A C AC AC和 C B ⏠ \overgroup{CB} CB 组成的单线段单圆弧轨迹;特别地,当 ∣ P A ∣ = ∣ P B ∣ \left| PA \right|=\left| PB \right| ∣PA∣=∣PB∣时 ∣ A C ∣ = 0 \left| AC \right|=0 ∣AC∣=0,退化为单圆弧轨迹
2.3 几何代价函数
基于上述几何关系可以定义基本代价函数
C a d j u s t = { C b a s e i f 直线运动 C b a s e ⋅ P n o n s t r a i g h t i f 同向转弯 C b a s e ⋅ ( P n o n s t r a i g h t + P c h a n g e ) i f 转向切换 C_{\mathrm{adjust}}=\begin{cases} C_{\mathrm{base}}\,\,& \mathrm{if} \text{直线运动}\\ C_{\mathrm{base}}\cdot P_{\mathrm{nonstraight}}& \mathrm{if} \text{同向转弯}\\ C_{\mathrm{base}}\cdot \left( P_{\mathrm{nonstraight}}+P_{\mathrm{change}} \right)& \mathrm{if} \text{转向切换}\\\end{cases} Cadjust=⎩ ⎨ ⎧CbaseCbase⋅PnonstraightCbase⋅(Pnonstraight+Pchange)if直线运动if同向转弯if转向切换
其中 C b a s e = L p r i m ⋅ P t r a v e l C_{\mathrm{base}}=L_{\mathrm{prim}}\cdot P_{\mathrm{travel}} Cbase=Lprim⋅Ptravel, L p r i m L_{\mathrm{prim}} Lprim是运动基元路径长度。为了考虑纯转向和反向运动,进一步修正代价函数为
C = { P r o t a t e i f L p r i m < ϵ C a d j u s t ⋅ P r e v e r s e i f 反向运动 C a d j u s t o t h e r w i s e C=\begin{cases} P_{\mathrm{rotate}}\,\,& \mathrm{if} L_{\mathrm{prim}}<\epsilon\\ C_{\mathrm{adjust}}\cdot P_{\mathrm{reverse}}& \mathrm{if} \text{反向运动}\\ C_{\mathrm{adjust}}& \mathrm{otherwise}\\\end{cases} C=⎩ ⎨ ⎧ProtateCadjust⋅PreverseCadjustifLprim<ϵif反向运动otherwise
2.4 运动学约束启发式
A*算法的启发式函数一般采用当前点到目标点的欧氏距离,State Lattice算法则向启发式函数进一步引入运动学约束
h ( n ) = max { C o n s t r a i n e d C o s t , U n c o n s t r a i n e d C o s t } h\left( n \right) =\max \left\{ \mathrm{ConstrainedCost},\mathrm{UnconstrainedCost} \right\} h(n)=max{ConstrainedCost,UnconstrainedCost}
其中:
- C o n s t r a i n e d C o s t \mathrm{ConstrainedCost} ConstrainedCost:只考虑车辆的非完整运动学约束而不考虑障碍物的有约束启发项(Constrained heuristics),通常采用Dubins或Reeds-Shepp曲线计算该项损失。
- Dubins曲线是指由美国数学家 Lester Dubins 在20世纪50年代提出的一种特殊类型的最短路径曲线。这种曲线通常用于描述在给定转弯半径下的无人机、汽车或船只等载具的最短路径,其特点是起始点和终点处的切线方向和曲率都是已知的,Dubins曲线包括直线段和最大转弯半径下的圆弧组成,通过合适的组合可以实现从一个姿态到另一个姿态的最短路径规划。更详细的算法原理请看曲线生成 | 图解Dubins曲线生成原理(附ROS C++/Python/Matlab仿真);
- Reeds-Shepp曲线是一种用于描述在平面上从一个点到另一个点最优路径的数学模型。这种曲线是由美国数学家 J. A. Reeds 和 L. A. Shepp 在1990年提出的,它被广泛应用于路径规划和运动规划问题中,具有最优性、约束性和多样性,更详细的算法原理请看曲线生成 | 图解Reeds-Shepp曲线生成原理(附ROS C++/Python/Matlab仿真);
- 只考虑障碍物信息而不考虑车辆运动学特性的无约束启发项(Unconstrained heuristics),通常采用Dijkstra或A*算法计算该项损失。
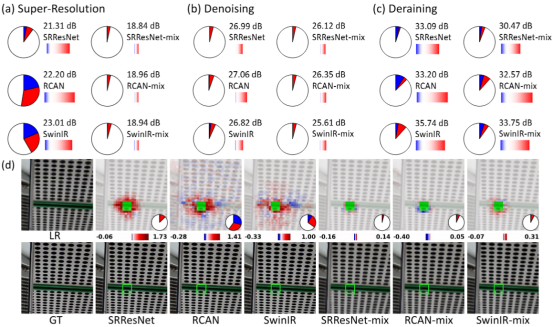
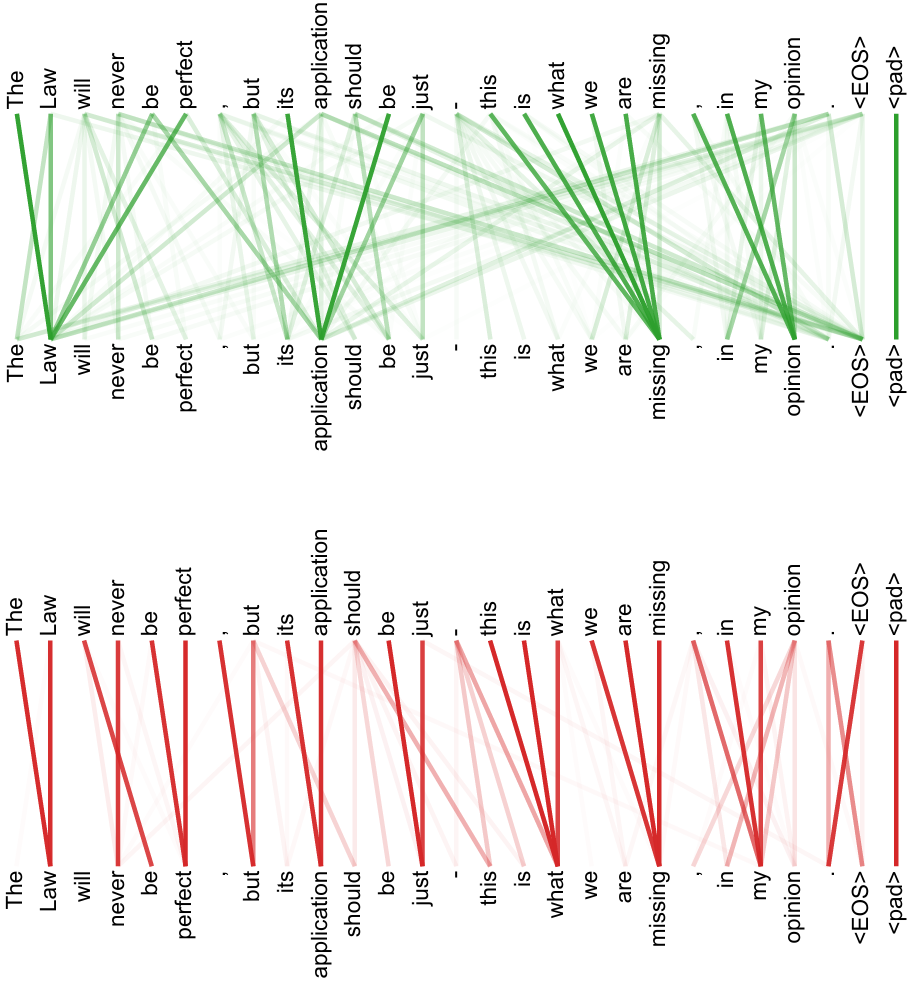
如图所示,可视化了不同类型的启发项。当环境障碍不影响规划路径时,有约束启发项损失往往大于无约束,因为后者没有考虑朝向和运动限制;当环境障碍影响规划路径时,有约束启发项损失往往小于无约束,因为后者会进行避障。因此对两项取 max \max max算子可以综合障碍影响和运动学特性,更符合真实情况。

3 算法仿真
3.1 ROS C++仿真
核心代码如下所示
bool StateLatticePathPlanner::createPath(const Point3d& start, const Point3d& goal, Points3d& path, Points3d& expand)
{clearGraph();clearQueue();auto start_node = addToGraph(getIndex(start));auto goal_node = addToGraph(getIndex(goal));precomputeObstacleHeuristic(goal_node);// 0) Add starting point to the open setaddToQueue(0.0, start_node);start_node->setAccumulatedCost(0.0);std::vector<NodeLattice::NodePtr> neighbors; // neighbors of current nodeNodeLattice::NodePtr neighbor = nullptr;// main loopint iterations = 0, approach_iterations = 0;while (iterations < search_info_.max_iterations && !queue_.empty()){// 1) Pick the best node (Nbest) from open listNodeLattice::NodePtr current_node = queue_.top().second;queue_.pop();// Save current node coordinates for debugexpand.emplace_back(current_node->pose().x(), current_node->pose().y(),motion_table_.getAngleFromBin(current_node->pose().theta()));// Current node exists in closed listif (current_node->is_visited()){continue;}iterations++;// 2) Mark Nbest as visitedcurrent_node->visited();// 2.1) Use an analytic expansion (if available) to generate a pathNodeLattice::NodePtr expansion_result = tryAnalyticExpansion(current_node, goal_node);if (expansion_result != nullptr){current_node = expansion_result;}// 3) Goal foundif (current_node == goal_node){return backtracePath(current_node, path);}// 4) Expand neighbors of Nbest not visitedneighbors.clear();getNeighbors(current_node, neighbors);for (auto neighbor_iterator = neighbors.begin(); neighbor_iterator != neighbors.end(); ++neighbor_iterator){neighbor = *neighbor_iterator;// 4.1) Compute the cost to go to this nodedouble g_cost = current_node->accumulated_cost() + current_node->getTraversalCost(neighbor, motion_table_);// 4.2) If this is a lower cost than prior, we set this as the new cost and new approachif (g_cost < neighbor->accumulated_cost()){neighbor->setAccumulatedCost(g_cost);neighbor->parent = current_node;// 4.3) Add to queue with heuristic costaddToQueue(g_cost + search_info_.lamda_h * getHeuristicCost(neighbor, goal_node), neighbor);}}}return false;
}
3.2 Python仿真
核心代码如下所示
def plan(self, start: Point3d, goal: Point3d) -> Tuple[List[Point3d], List[Dict]]:"""State Lattice motion plan function"""start_node = Point3d(start.x(), start.y(), self.motion_table.getOrientationBin(start.theta()))goal_node = Point3d(goal.x(), goal.y(), self.motion_table.getOrientationBin(goal.theta()))self.start = self.addToGraph(self.getIndex(start_node))self.goal = self.addToGraph(self.getIndex(goal_node))self.obstacle_htable = self.precomputeObstacleHeuristic(goal)# 0) Add starting point to the open setself.queue.clear();heapq.heappush(self.queue, QueueNode(0.0, self.start))self.start.setAccumulatedCost(0.0)# main loopiterations = 0path, expand = [], []while iterations < self.max_iterations and self.queue:# 1) Pick the best node (Nbest) from open listcurr_queue_node = heapq.heappop(self.queue)current = curr_queue_node.node# Save current node coordinates for debugif current.parent:curr_pose, parent_pose = current.pose, current.parent.posechild = Point3d(curr_pose.x(), curr_pose.y(), self.motion_table.getAngleFromBin(curr_pose.theta()))parent = Point3d(parent_pose.x(), parent_pose.y(), self.motion_table.getAngleFromBin(parent_pose.theta()))expand.append((child, parent))# Current node exists in closed listif current.is_visited:continueiterations += 1# 2) Mark Nbest as visitedcurrent.is_visited = True# 2.1) Use an analytic expansion (if available) to generate a pathexpansion_result = self.tryAnalyticExpansion(current)if expansion_result:current = expansion_result[-1]# 3) Goal foundif self.isReachGoal(current):cost, path = self.backtracePath(current)return path# 4) Expand neighbors of Nbest not visitedneighbors = current.getNeighbors(neighborGetter, self.getIndex, self.isCollision, self.motion_table)for neighbor in neighbors:# 4.1) Compute the cost to go to this nodeg_cost = current.accumulated_cost + current.getTraversalCost(neighbor, self.motion_table)# 4.2) If this is a lower cost than prior, we set this as the new cost and new approachif g_cost < neighbor.accumulated_cost:neighbor.accumulated_cost = g_costneighbor.parent = current# 4.3) Add to queue with heuristic costf_cost = g_cost + 1.5 * self.getHeuristicCost(neighbor.pose)heapq.heappush(self.queue, QueueNode(f_cost, neighbor))LOG.INFO("Planning Failed.")return []
完整工程代码请联系下方博主名片获取
🔥 更多精彩专栏:
- 《ROS从入门到精通》
- 《Pytorch深度学习实战》
- 《机器学习强基计划》
- 《运动规划实战精讲》
- …
相关文章:
运动规划实战案例 | 图解基于状态晶格(State Lattice)的路径规划(附ROS C++/Python仿真)
目录 1 控制采样 vs 状态采样2 State Lattice路径规划2.1 算法流程2.2 Lattice运动基元生成2.3 几何代价函数2.4 运动学约束启发式 3 算法仿真3.1 ROS C仿真3.2 Python仿真 1 控制采样 vs 状态采样 控制采样的技术路线源自经典的运动学建模思想。这种方法将机器人的控制指令空…...

深入浅出对抗学习:概念、攻击、防御与代码实践
深入浅出对抗学习:概念、攻击、防御与代码实践 近年来,深度学习在图像识别、自然语言处理等领域取得了巨大成功。然而,研究表明,这些看似强大的模型却异常脆弱,容易受到**对抗样本(Adversarial Examples&a…...
Neo4j(二) - 使用Cypher操作Neo4j
文章目录 前言一、Cypher简介二、数据库操作1. 创建数据库2. 查看数据库3. 删除数据库4. 切换数据库 三、节点、关系及属性操作1. 创建节点与关系1.1 语法1.2 示例 2. 查询数据2.1 语法2.2 示例 3. 更新数据3.1 语法3.2 示例 4. 删除节点与关系4.1 语法4.2 示例 5. 合并数据5.1…...

09、供应商管理数字化转型:从潜在评估到战略合作的系统化方法
在全球化竞争和供应链日益复杂的商业环境下,供应商管理已成为企业核心竞争力的关键组成部分。优秀的供应商管理体系不仅能确保物料和服务的稳定供应,更能成为企业创新、降本增效的战略资源。本文将系统性地介绍供应商管理的完整框架,从潜在供…...
)
AI时代新词-AI增强现实(AI - Enhanced Reality)
一、什么是AI增强现实(AI - Enhanced Reality)? AI增强现实(AI - Enhanced Reality)是指将人工智能(AI)技术与增强现实(Augmented Reality,简称AR)技术相结合…...
批量转存夸克网盘内容并分享实操教程
批量转存夸克网盘内容并分享 经常使用我AI工具(圈友互联AI)的应该在每日资源这里看到,会每天自动更新最新资源信息,这些资源是自动从各处爬取出来再批量转存进行分享处理的! 今天就和大家分享下,如何对夸克…...

Swagger与go-zero框架生成和展示API文档详解
在现代API开发中,清晰、准确的接口文档是前后端协作的重要基础。作为一款功能强大的Go语言微服务框架,go-zero提供了简便的方式来生成Swagger文档,极大地提高了API开发的效率与质量。今天,我们将深入探讨Swagger的作用以及如何通过…...

“安康杯”安全生产知识竞赛活动流程方案
一、竞赛组织部门:排水公司安全生产办公室 二、竞赛说明: 1、由安全生产办公室组编辑、整理,安全生产领导小组审核。竞赛时由公司领导及各部门负责人对本次知识竞赛进行监督评比,以保证竞赛活动的公平、公正。本次竞赛活动由闫红…...
特征分解:线性代数在AI大模型中的核心工具
🧑 博主简介:CSDN博客专家、CSDN平台优质创作者,高级开发工程师,数学专业,10年以上C/C++, C#, Java等多种编程语言开发经验,拥有高级工程师证书;擅长C/C++、C#等开发语言,熟悉Java常用开发技术,能熟练应用常用数据库SQL server,Oracle,mysql,postgresql等进行开发应用…...
)
sqlite的拼接字段的方法(sqlite没有convert函数)
我在sqlserver 操作方式: /// <summary>///获取当前门店工资列表/// </summary>/// <param name"wheres">其他条件</param>/// <param name"ThisMendian">当前门店</param>/// <param name"IsNotU…...

【SSL部署与优化】OCSP Stapling配置指南:减少证书验证延迟
以下是 通过 Nginx 和 Apache 启用 OCSP Stapling 的详细配置指南,帮助您减少证书验证延迟并提升 HTTPS 性能: 一、OCSP Stapling 核心原理 • 目的:服务器定期从 CA 获取 OCSP(在线证书状态协议)响应,缓存…...
的使用)
【C#】Invalidate()的使用
Invalidate()的使用 Invalidate() 是 C# 中用于通知控件需要重新绘制的方法。它通常用于 Windows Forms 应用程序中,当想要更新控件的显示内容时使用。调用 Invalidate() 方法后,系统会安排对该控件进行重绘,这将导致后续调用 OnPaint 方法&…...
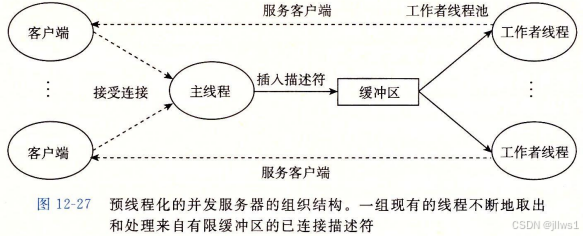
理解计算机系统_并发编程(10)_线程(七):基于预线程化的并发服务器
前言 以<深入理解计算机系统>(以下称“本书”)内容为基础,对程序的整个过程进行梳理。本书内容对整个计算机系统做了系统性导引,每部分内容都是单独的一门课.学习深度根据自己需要来定 引入 接续理解计算机系统_并发编程(9)_线程(六):读者-写者问题-…...
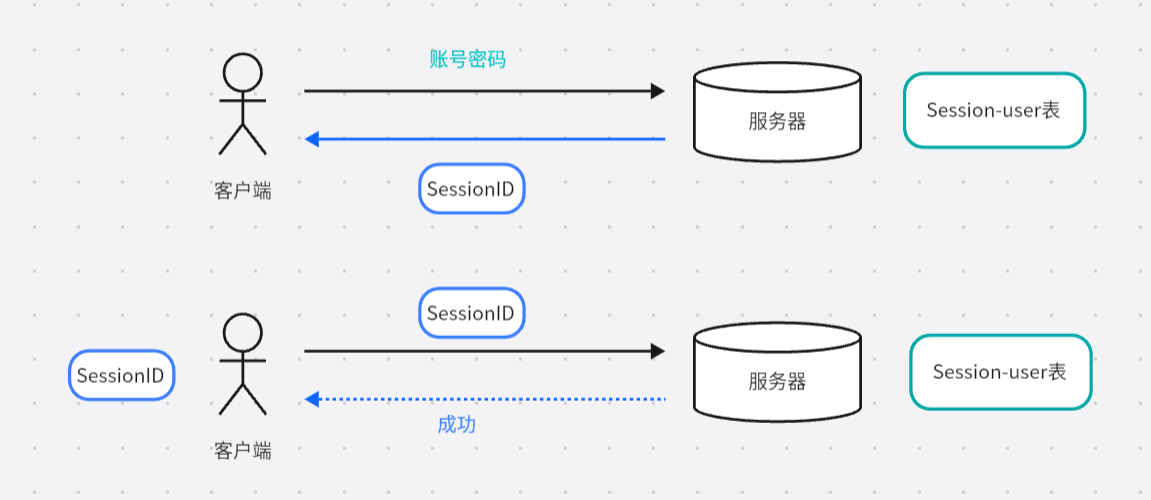
身份认证: JWT和Session是什么?
一、为什么需要临时凭证? 系统面临三个核心约束: 唯一鉴权方式只有(账号,密码) 服务端不记录请求状态,服务端不知道用户已登录了 避免重复传输敏感信息,不能每次都携带(账号,密码…...

OpenFOAM 字典系统与求解器配置解析机制
文章目录 OpenFOAM 字典系统与求解器配置解析机制字典系统的基本结构配置文件解析流程字典实现细节1. 字典存储结构2. 条目类型3. 令牌系统4. 解析过程 典型配置文件示例解析字典访问机制高级特性性能考虑 OpenFOAM 字典系统与求解器配置解析机制 OpenFOAM 使用一套独特的字典…...
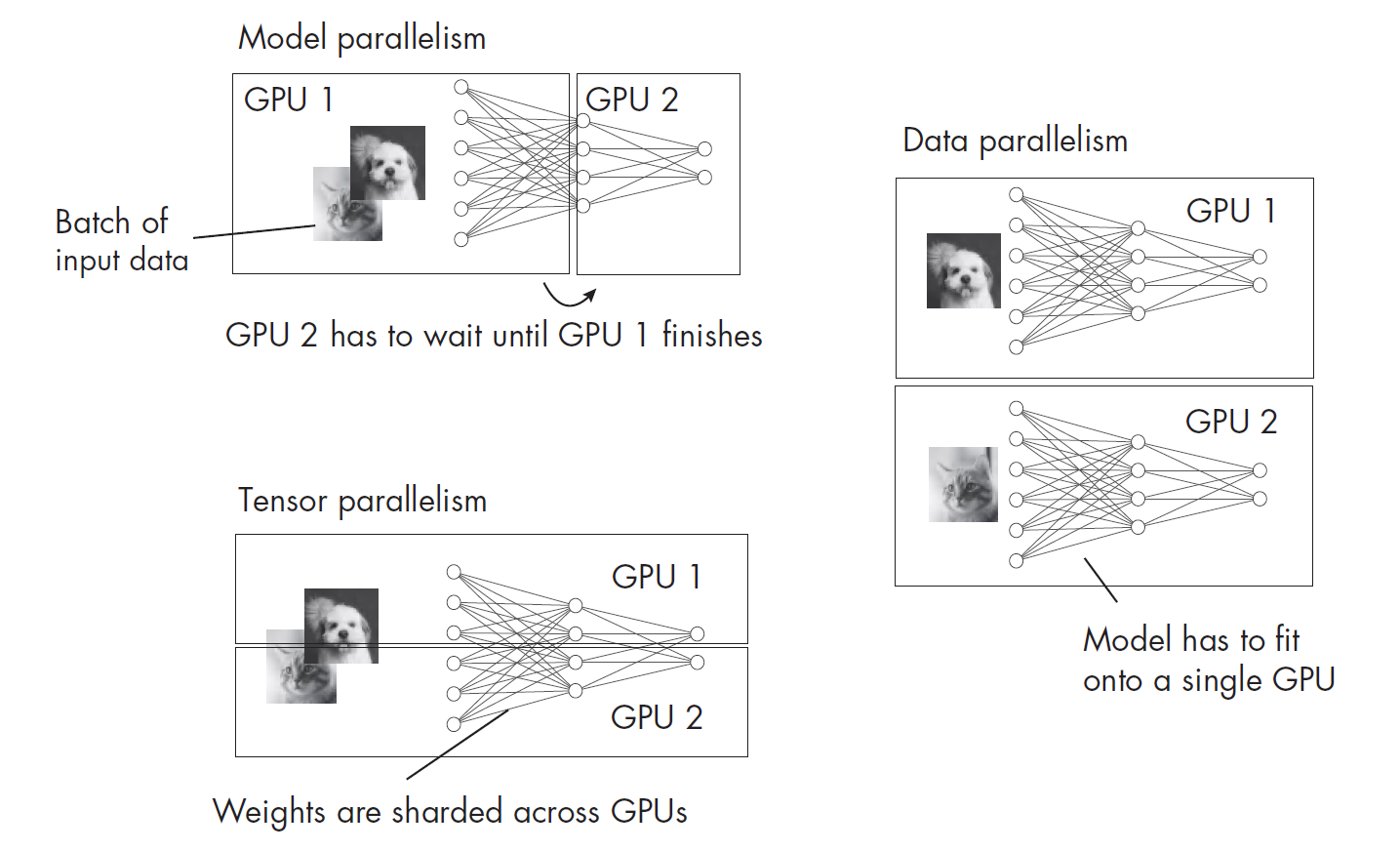
机器学习中的多GPU训练模式
文章目录 一、数据并行(Data Parallelism)二、模型并行(Model Parallelism)1. 模型并行2. 张量并行(Tensor Parallelism) 三、流水线并行(Pipeline Parallelism)四、混合并行&#x…...
TPAMI 2025 | CEM:使用因果效应图解释底层视觉模型
底层视觉可解释性专题:https://x-lowlevel-vision.github.io/ 论文:https://arxiv.org/abs/2407.19789 代码:https://github.com/J-FHu/CEM 动机 在底层视觉领域,深度学习模型虽极大提升了任务性能,但其内部运行机…...

小红书文章内容提取免费API接口教程
接口简介: 提取指定小红书文章内容。本接口仅做内容提取,未经作者授权请勿转载。 请求地址: https://cn.apihz.cn/api/caiji/xiaohongshu.php 请求方式: POST或GET。 请求参数: 【名称】【参数】【必填】【说明】 【…...
Halcon 图像预处理②
非线性图像分段变化: 先窗体打开图片 对数非线性变化: 结果图像的亮度/对比度显著增加 log_image(Image,LogImag1,e) 参数1:输入图像 参数2: 输出图像 参数3:底数 log_image(Image,LogImage2,0.1) 图像结果亮度和…...

20250526-C++基础-函数指针
C基础-函数指针 函数指针,顾名思义就是指向函数的指针,用一个变量来存储函数的地址,可以通过这个变量(指针)间接访问函数。(可以把函数指针名看作函数名来进行函数调用)。代码及说明如下&#…...
软考 系统架构设计师系列知识点之杂项集萃(73)
接前一篇文章:软考 系统架构设计师系列知识点之杂项集萃(72) 第126题 可一次性编程的只读存储器是( )。 A. ROM B. PROM C. EPROM D. EEPROM 正确答案:B。 解析: ROM:出厂时已编程,用户无…...

大模型训练中的GPU作用解析
📌 友情提示: 本文内容由银河易创AI(https://ai.eaigx.com)创作平台的gpt-4-turbo模型辅助完成,旨在提供技术参考与灵感启发。文中观点或代码示例需结合实际情况验证,建议读者通过官方文档或实践进一步确认…...

Flutter Web 3.0革命:用WebGPU实现浏览器端实时光追渲染,性能提升300%
一、WebGPU为何是图形渲染的未来? 1. 传统WebGL的致命瓶颈 // WebGL 2.0绘制调用示例(每秒帧率<45) gl.drawElements(gl.TRIANGLES, vertexCount, gl.UNSIGNED_SHORT, 0); 性能对比表: 场景WebGL 2.0WebGPU三角形绘制速率…...
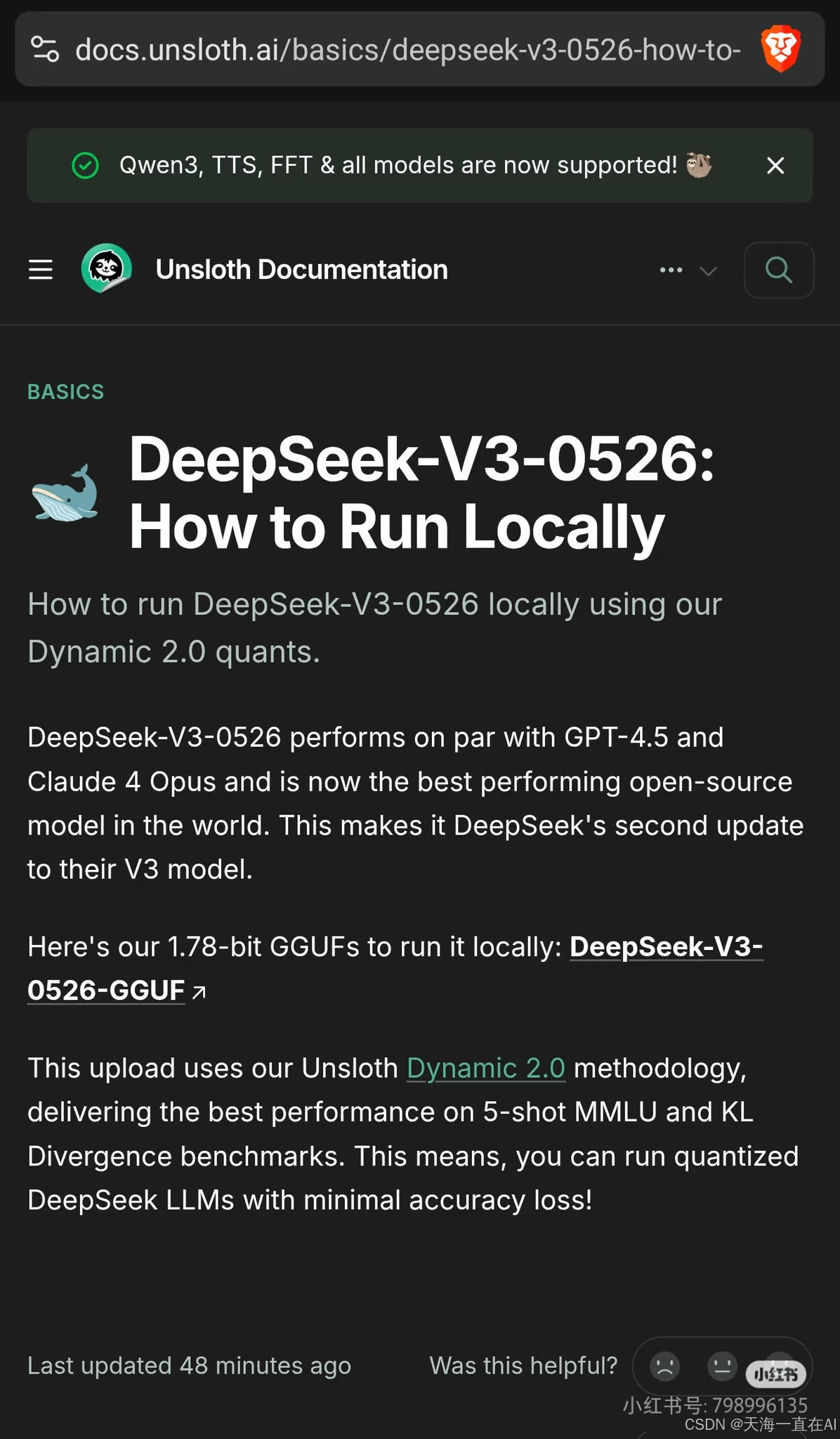
DeepSeek-V3-0526乍现
DeepSeek-V3-0526 可能是 DeepSeek 最新发布的模型版本,相较于之前的 DeepSeek-V3-0324,它在代码能力、推理性能和本地部署方面有了进一步提升。以下是关于该版本的主要信息: - DeepSeek-V3-0526 在多项基准测试中表现优异,性能…...

Java设计模式之观察者模式:从基础到高级的全面解析
文章目录 一、观察者模式基础概念1.1 什么是观察者模式?1.2 观察者模式的四大角色1.3 观察者模式类图二、观察者模式实现步骤2.1 基础实现步骤2.2 详细代码实现第一步:定义主题接口第二步:定义观察者接口第三步:创建具体主题第四步:创建具体观察者第五步:客户端使用三、观…...

C/C++---类型转换运算符
在C中,类型转换运算符(Type Conversion Operator)允许类对象在需要时自动转换为其他类型。这是一种特殊的成员函数,能够增强类的灵活性和交互性。 1. 基本语法 类型转换运算符的声明格式为: operator 目标类型() co…...

STM32 I2C 通信协议
1、原理 1、硬件电路 一主多从,单片机作为总线主机 SDA:数据线 SCL:时钟线 主机对SCL线完全控制,从机只能读取;在空闲状态下,主机可以主动发起对SDA的控制,只有在从机发送数据和从机应答的时…...

【后端高阶面经:Elasticsearch篇】38、Elasticsearch 高可用架构解析:分片容灾、Translog 调优与双集群
一、高可用架构核心:节点角色与分布式设计 (一)节点角色精细化划分 1. 四大核心节点类型 节点类型核心职责资源配置建议典型部署数量主节点(Master)集群元数据管理(索引创建、分片分配、节点选举)CPU≥4核,内存≥16GB,禁用数据存储3-5个(奇数)数据节点(Data)存储…...
5月26日复盘-自注意力机制
5月26日复盘 一、自注意力机制 Self-Attention Mechanism,自注意力机制,用于捕捉序列数据内部依赖关系的关键技术。它在NLP和CV中非常重要,尤其是Transformer。 1. 产生背景 自注意力机制的产生与序列建模任务(如机器翻译、文…...

*HTML `<script>` 标签中的核心属性解析:掌控脚本加载与执行的艺术
HTML <script> 标签中的核心属性:掌控脚本加载与执行的艺术 在网页开发中,<script> 标签是 JavaScript 的“入口”。它不仅决定了脚本如何加载和执行,还深刻影响着页面性能、安全性和跨域策略。本文将深入解析 <script> 标…...