图像分割技术的实现与比较分析
引言
图像分割是计算机视觉领域中的一项基础技术,其目标是将数字图像划分为多个图像子区域(像素的集合),以简化图像表示,便于后续分析和理解。在医学影像、遥感图像分析、自动驾驶、工业检测等众多领域,图像分割都发挥着至关重要的作用。本文将深入探讨几种经典的图像分割算法,包括阈值分割、边缘检测、分水岭算法和K-means聚类分割,并通过Python实现这些算法,对比分析它们的性能和适用场景。
图像分割的理论基础
图像分割的本质是根据图像的某些特征(如颜色、纹理、强度等)将图像划分为不同的区域。理想的分割结果应该使得同一区域内的像素具有相似的特征,而不同区域之间的像素则具有明显的差异。根据实现方式的不同,图像分割算法可以大致分为以下几类:
1. 基于阈值的分割:通过设定一个或多个阈值,将图像像素分为不同类别。
2. 基于边缘的分割:通过检测图像中的边缘(即像素值急剧变化的区域)来确定区域边界。
3. *于区域的分割:如分水岭算法,将图像视为地形图,通过模拟"淹没"过程来划分区域。
4. 基于聚类的分割:如K-means聚类,根据像素特征的相似性将它们分组。
我们选择了一张包含丰富细节和多种纹理的图像作为测试对象,以便全面评估不同分割算法的性能。

阈值分割
阈值分割是最简单也是应用最广泛的图像分割方法之一。其基本原理是选择一个阈值,将图像中的像素分为两类:大于阈值的像素被分为一类(通常设为白色),小于阈值的像素被分为另一类(通常设为黑色)。
阈值分割的实现
def threshold_segmentation(image, threshold=127, max_value=255):"""基于阈值的图像分割"""# 转为灰度图if len(image.shape) == 3:gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)else:gray = image# 应用阈值分割_, thresh = cv2.threshold(gray, threshold, max_value, cv2.THRESH_BINARY)return thresh阈值的选择对分割结果有着决定性的影响。为了研究不同阈值对分割效果的影响,我们尝试了多个阈值(50、100、127、150、200),并比较了它们的分割结果。
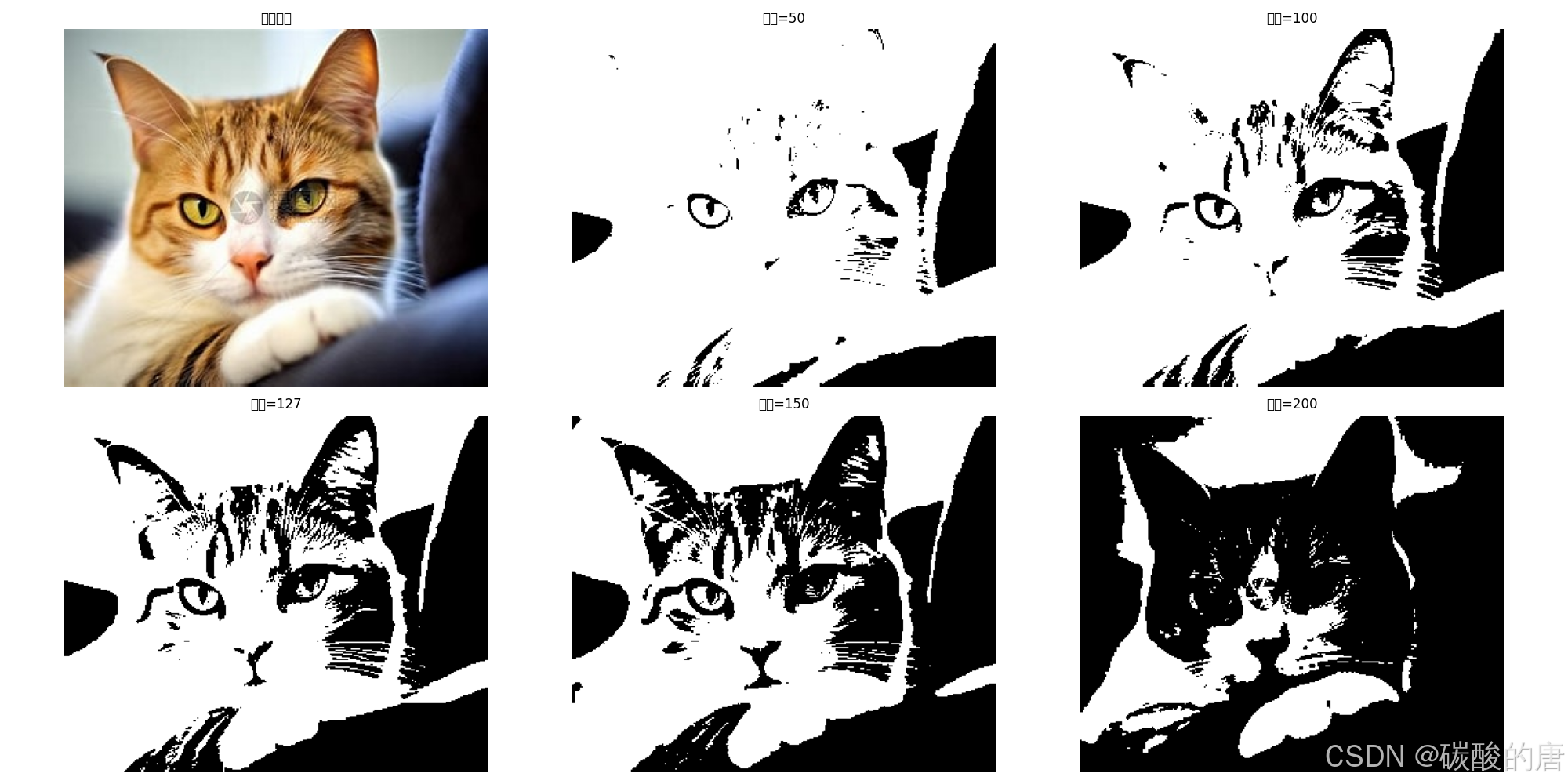
从上图可以看出,较低的阈值(如50)会导致更多的像素被分类为白色,而较高的阈值(如200)则会导致更多的像素被分类为黑色。阈值的选择应根据具体的应用场景和图像特性来确定。在本例中,阈值127似乎提供了较为平衡的分割结果,既保留了主要结构,又去除了一些细节噪声。
边缘检测分割
边缘检测是另一种常用的图像分割方法,它通过识别图像中像素值急剧变化的区域(即边缘)来划分不同的区域。在本实验中,我们使用了Canny边缘检测算法,这是一种广泛使用的边缘检测方法。
边缘检测的实现
def edge_based_segmentation(image, low_threshold=50, high_threshold=150):"""基于边缘检测的图像分割"""# 转为灰度图if len(image.shape) == 3:gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)else:gray = image# 高斯模糊blurred = cv2.GaussianBlur(gray, (5, 5), 0)# Canny边缘检测edges = cv2.Canny(blurred, low_threshold, high_threshold)return edgesCanny算法有两个重要参数:低阈值和高阈值。它们共同决定了哪些梯度变化会被识别为边缘。我们尝试了四组不同的参数组合:(30, 100)、(50, 150)、(80, 200)和(100, 250),以观察它们对边缘检测结果的影响。
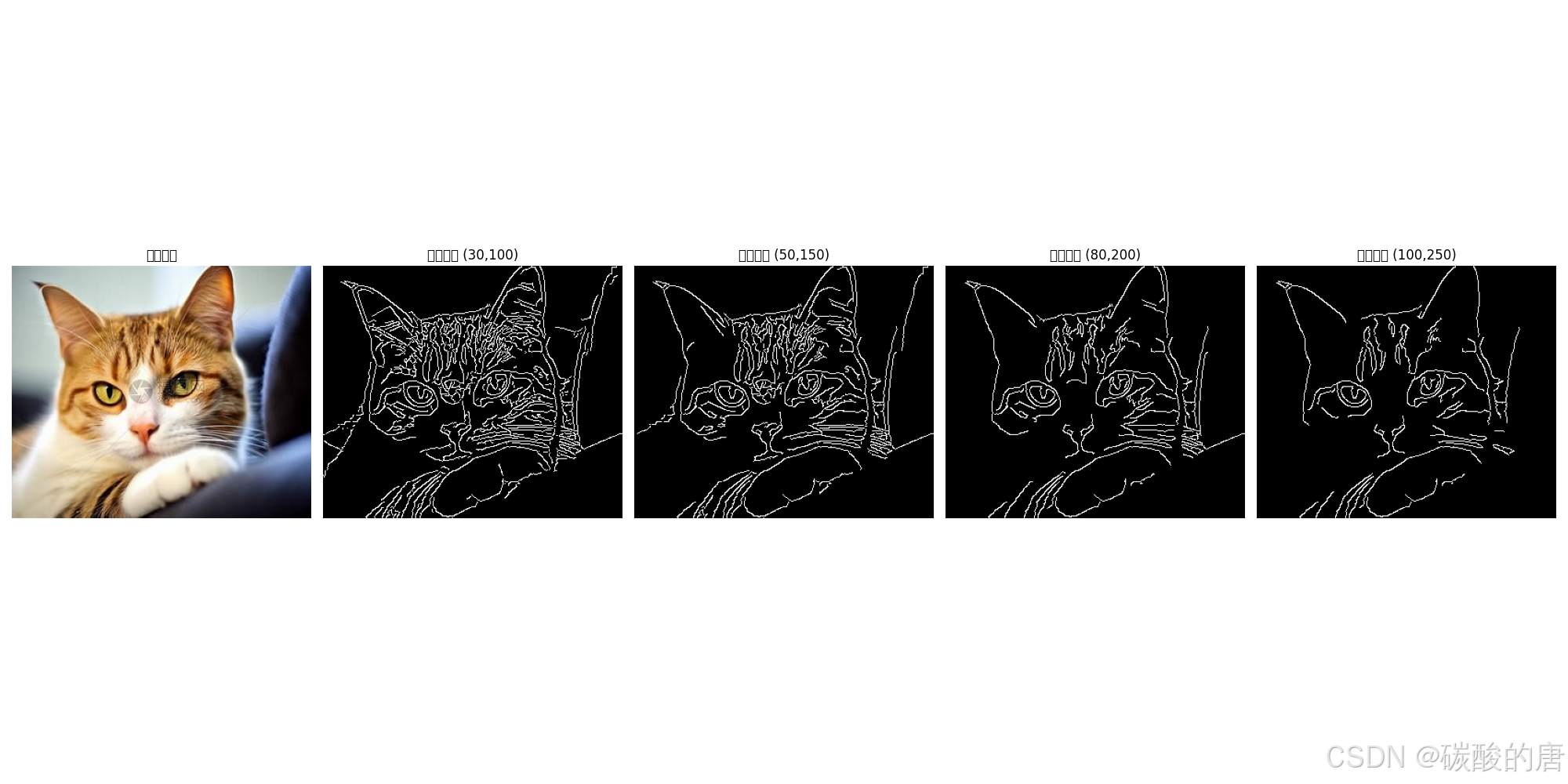
从结果可以看出,较低的阈值组合(如30,100)会检测出更多的边缘,包括一些可能是噪声的细节;而较高的阈值组合(如100,250)则只会检测出图像中最显著的边缘。在实际应用中,需要根据具体需求在边缘检测的敏感度和抗噪声能力之间找到平衡。
分水岭算法
分水岭算法是一种基于区域的分割方法,它将图像视为地形图,像素值表示高度。算法模拟水从低处向高处"淹没"的过程,当来自不同"盆地"的水即将汇合时,就会建立"堤坝",这些"堤坝"就构成了分割的边界。
分水岭算法的实现
def watershed_segmentation(image):"""基于分水岭算法的图像分割"""# 转为BGR格式(如果是灰度图)if len(image.shape) == 2:image = cv2.cvtColor(image, cv2.COLOR_GRAY2BGR)# 转为灰度图并进行阈值处理gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)_, thresh = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)# 噪声去除kernel = np.ones((3, 3), np.uint8)opening = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel, iterations=2)# 确定背景区域sure_bg = cv2.dilate(opening, kernel, iterations=3)# 确定前景区域dist_transform = cv2.distanceTransform(opening, cv2.DIST_L2, 5)_, sure_fg = cv2.threshold(dist_transform, 0.7 * dist_transform.max(), 255, 0)# 找到未知区域sure_fg = np.uint8(sure_fg)unknown = cv2.subtract(sure_bg, sure_fg)# 标记_, markers = cv2.connectedComponents(sure_fg)markers = markers + 1markers[unknown == 255] = 0# 应用分水岭算法markers = cv2.watershed(image, markers)# 标记边界result = image.copy()result[markers == -1] = [0, 0, 255] # 边界标记为红色return result分水岭算法的一个显著特点是它能够生成闭合的边界,这在某些应用场景中非常有用。下图展示了分水岭算法的分割结果:
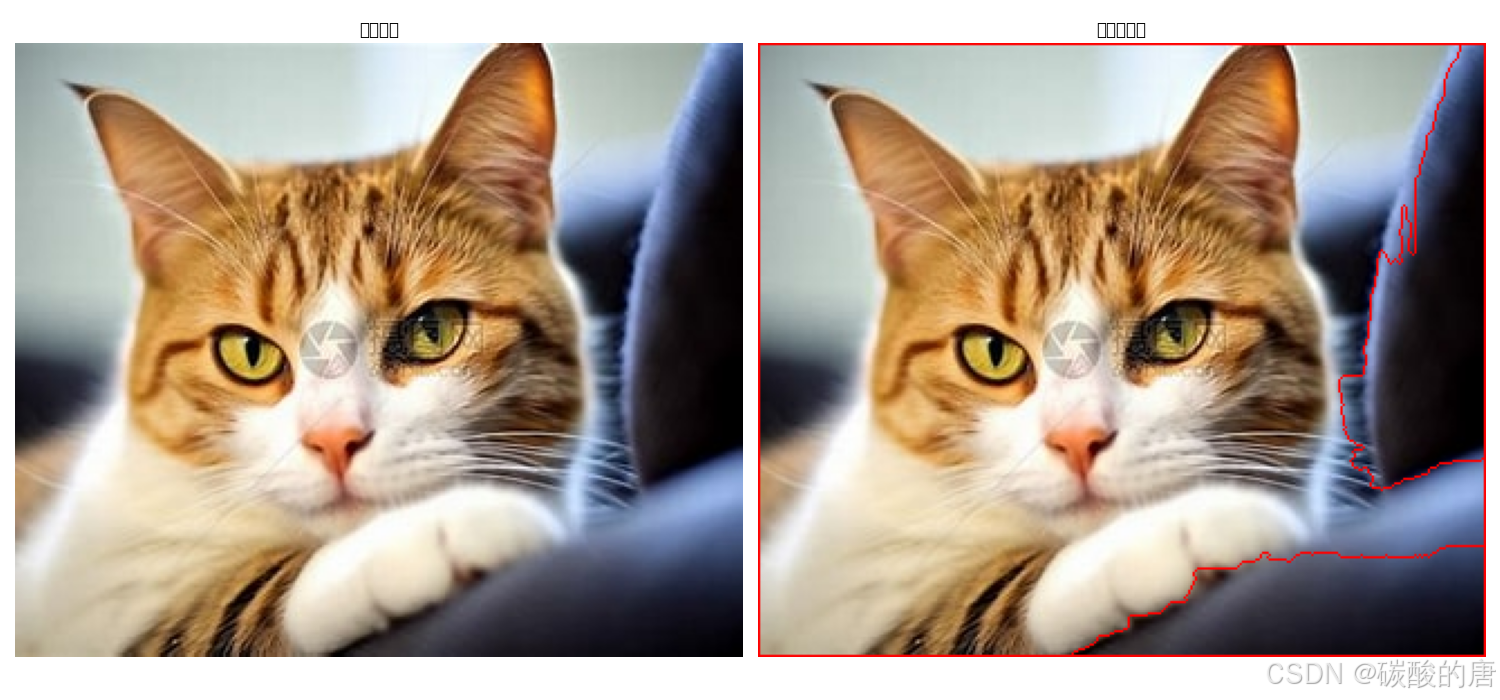
从结果可以看出,分水岭算法能够有效地识别图像中的区域,并用红色线条标记出区域之间的边界。然而,分水岭算法也容易受到噪声的影响,导致过度分割。在实际应用中,通常需要进行预处理(如滤波、形态学操作等)来减轻这种影响。
K-means聚类分割
K-means聚类是一种基于聚类的分割方法,它将图像中的像素按照其特征(如颜色)分为K个类别。算法通过迭代优化,使得同一类别内的像素尽可能相似,而不同类别之间的像素尽可能不同。
K-means聚类的实现
def kmeans_segmentation(image, n_clusters=3):"""基于K-means聚类的图像分割"""# 将图像转换为二维数组if len(image.shape) == 3:pixel_values = image.reshape((-1, 3)).astype(np.float32)else:pixel_values = image.reshape((-1, 1)).astype(np.float32)# 定义停止条件criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 100, 0.2)# 应用K-means_, labels, centers = cv2.kmeans(pixel_values, n_clusters, None, criteria, 10, cv2.KMEANS_RANDOM_CENTERS)# 将结果转换回uint8centers = np.uint8(centers)segmented_data = centers[labels.flatten()]# 重塑为原始图像维度segmented_image = segmented_data.reshape(image.shape)return segmented_imageK-means聚类的一个关键参数是聚类的数量K。为了研究不同K值对分割结果的影响,我们尝试了多个K值(2、3、5、7、10),并比较了它们的分割效果。
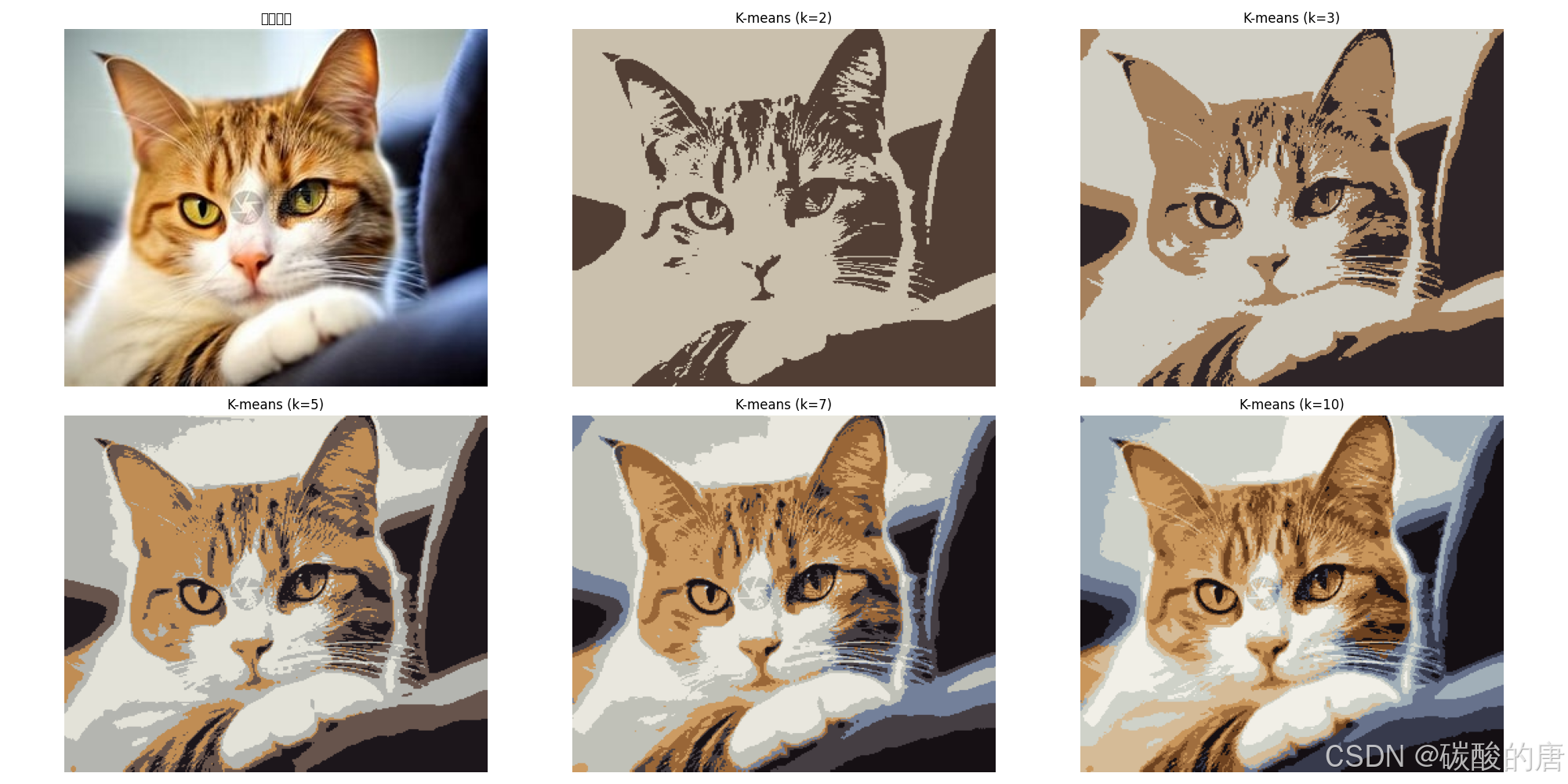
从结果可以看出,随着K值的增加,分割的细节也越来越丰富。当K=2时,图像只被分为两个主要区域;而当K=10时,图像中的许多细节都被分割出来。在实际应用中,需要根据具体需求选择合适的K值,以在分割细节和计算复杂度之间取得平衡。
不同分割方法的比较
为了全面评估不同分割方法的性能,我们选择了每种方法的最佳参数设置,并将它们的分割结果进行了对比。
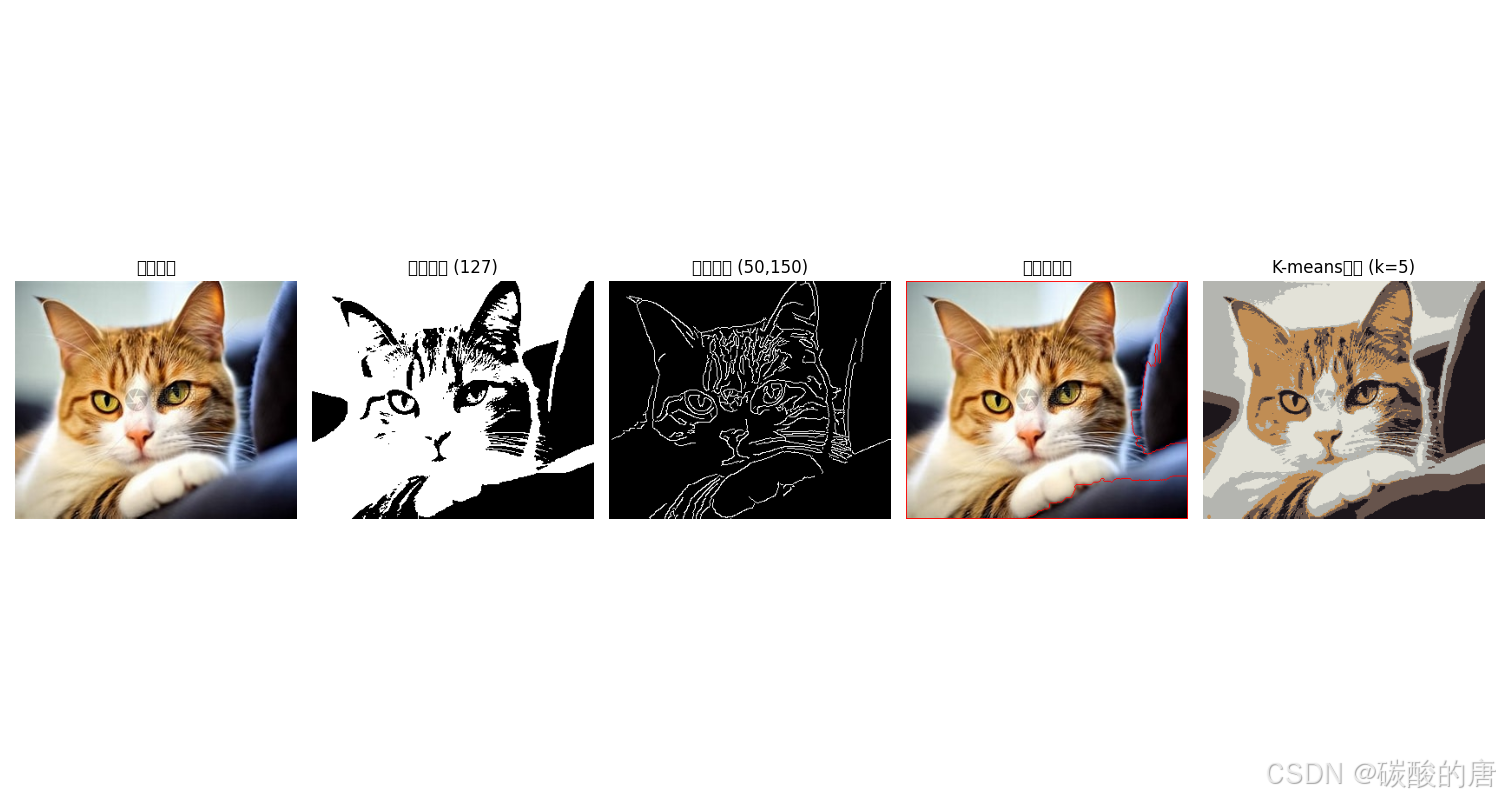
从上图可以看出,不同的分割方法各有优缺点:
1.阈值分割:实现简单,计算效率高,但只能基于像素强度进行二分类,难以处理复杂的图像。
2. 边缘检测:能够有效地识别图像中的边缘,但可能产生不闭合的边界,需要后续处理。
3. 分水岭算法:能够生成闭合的边界,适合分割相互接触的物体,但容易受噪声影响,导致过度分割。
4. K-means聚类:能够基于颜色特征进行多类别分割,效果较为自然,但计算复杂度较高,且结果受初始聚类中心的影响。
结论与展望
本文详细介绍了四种经典的图像分割算法,并通过Python实现和实验比较了它们的性能。实验结果表明,不同的分割方法适用于不同的场景,没有一种方法能够在所有情况下都表现最佳。在实际应用中,应根据具体需求选择合适的分割方法,或者将多种方法结合使用,以获得更好的分割效果。
未来的研究方向可能包括:
1. 探索更先进的图像分割算法,如基于深度学习的方法(如U-Net、Mask R-CNN等)。
2. 研究如何自适应地选择分割参数,以适应不同的图像特性。
3. 开发混合分割方法,结合多种算法的优点,以提高分割的准确性和鲁棒性。
4. 将图像分割技术应用于更广泛的领域,如医学影像分析、遥感图像处理、自动驾驶等。
参考文献
1. Gonzalez, R. C., & Woods, R. E. (2018). Digital Image Processing (4th ed.). Pearson.
2. Szeliski, R. (2010). Computer Vision: Algorithms and Applications. Springer.
3. Shapiro, L. G., & Stockman, G. C. (2001). Computer Vision. Prentice Hall.
4. OpenCV Documentation. https://docs.opencv.org/
5. Beucher, S., & Meyer, F. (1993). The morphological approach to segmentation: the watershed transformation. Mathematical morphology in image processing, 34, 433-481.
6. MacQueen, J. (1967). Some methods for classification and analysis of multivariate observations. Proceedings of the fifth Berkeley symposium on mathematical statistics and probability, 1(14), 281-297.
相关文章:
图像分割技术的实现与比较分析
引言 图像分割是计算机视觉领域中的一项基础技术,其目标是将数字图像划分为多个图像子区域(像素的集合),以简化图像表示,便于后续分析和理解。在医学影像、遥感图像分析、自动驾驶、工业检测等众多领域,图…...
node.js配置变量
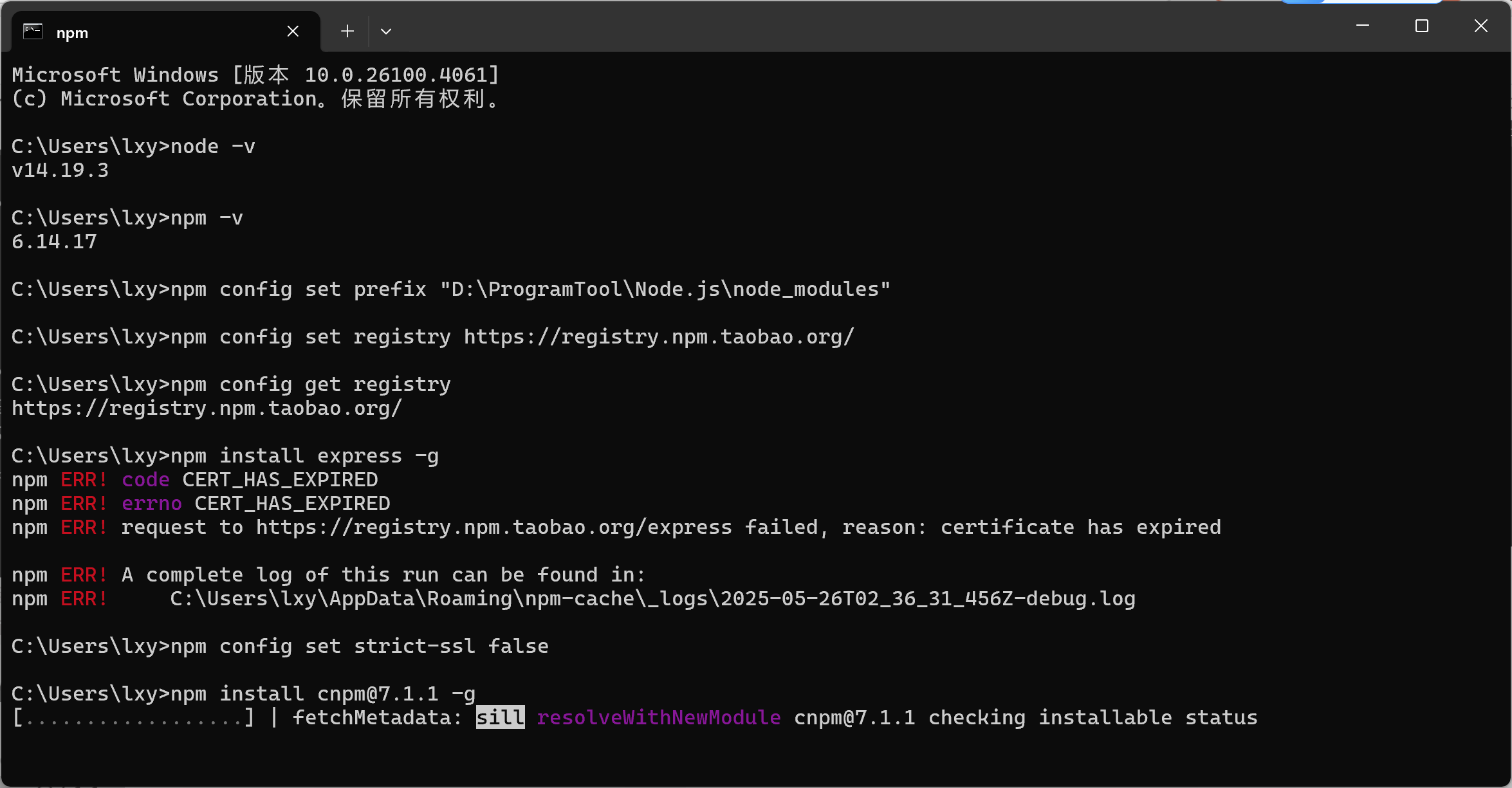
一、下载安装包 1、官网下载 大家可以在官网下载,适合自己电脑以及项目的需要的版本。 二、node.js安装 1、安装 双击下载的安装包文件,通常为 .exe 或 .msi 格式(Windows)或 .dmg 格式(Mac)。系统会…...
Ubuntu+Docker+内网穿透:保姆级教程实现安卓开发环境远程部署
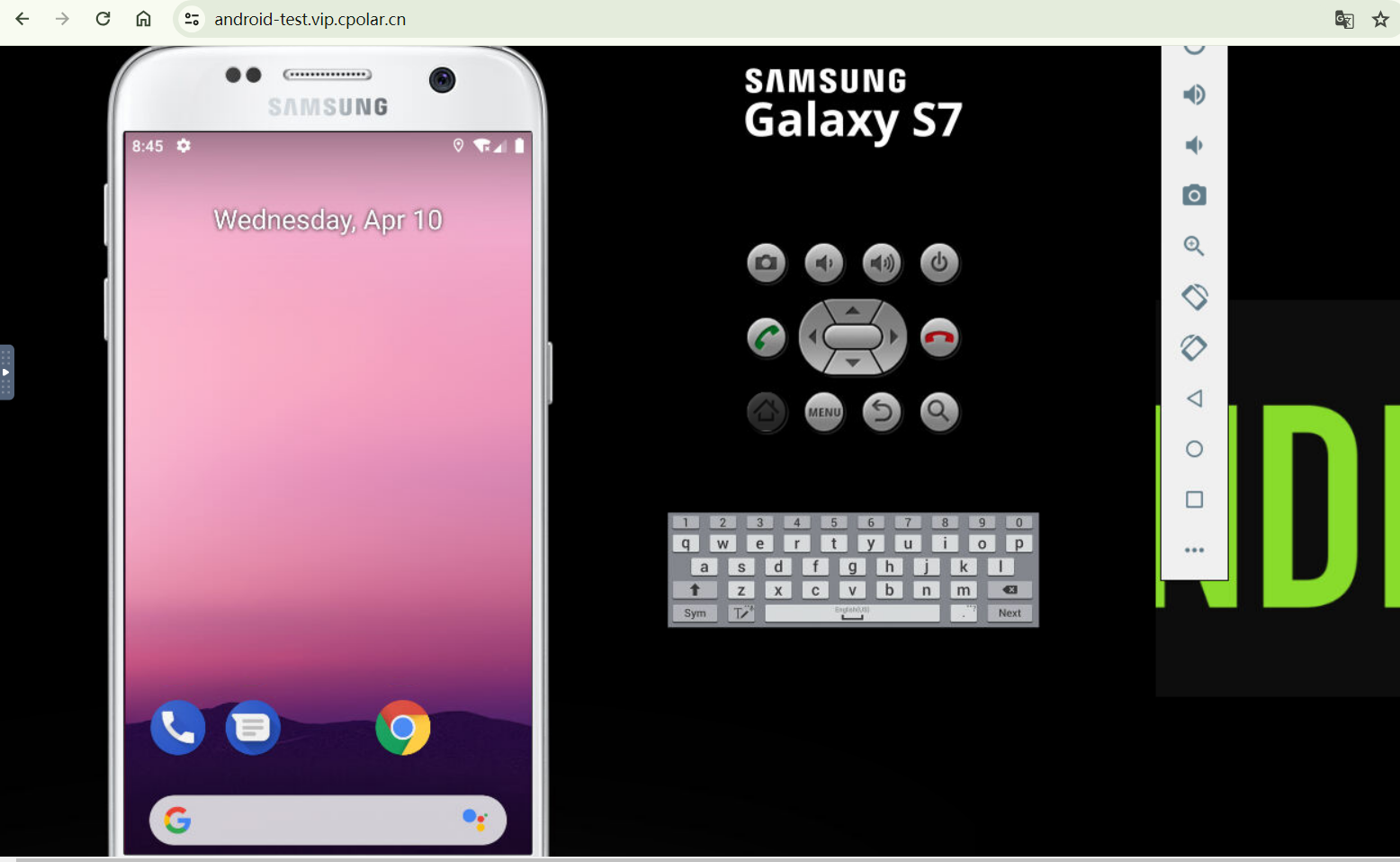
文章目录 前言1. 虚拟化环境检查2. Android 模拟器部署3. Ubuntu安装Cpolar4. 配置公网地址5. 远程访问小结 6. 固定Cpolar公网地址7. 固定地址访问 前言 本文将详细介绍一种创新性的云开发架构:基于Ubuntu系统构建Android仿真容器环境,并集成安全隧道技…...

为什么需要清除浮动?清除浮动的方式有哪些?
导语: 在前端面试中,“清除浮动”几乎是每位面试官都会问到的基础题。虽然浮动已经不如 Flex 和 Grid 那么常用了,但它在许多老项目中仍然占有一席之地。理解浮动的机制、掌握清除浮动的方式,是面试中体现你前端基础扎实度的关键点。 一、面试主题概述 浮动(float)最初是…...

计算机网络学习20250526
SMTP——简单邮件传输协议 TCP 端口号:25 Alice给Bob发送邮件过程: Alice使用邮件代理程序写邮件给Bob用户代理把报文发给邮件服务器,放入报文队列中邮件服务器上SMTP客户端建立与Bob服务器上SMTP服务器的TCP连接经过初始的握手后ÿ…...
)
ArkUI:鸿蒙应用响应式与组件化开发指南(一)
文章目录 引言1.ArkUI核心能力概览1.1状态驱动视图1.2组件化:构建可复用UI 2.状态管理:从单一组件到全局共享2.1 状态装饰器2.2 状态传递模式对比 引言 鸿蒙生态正催生应用开发的新范式。作为面向全场景的分布式操作系统,鸿蒙的北向应用开发…...

YOLOv11改进 | Neck篇 | 双向特征金字塔网络BiFPN助力YOLOv11有效涨点
YOLOv11改进 | Neck篇 | 双向特征金字塔网络BiFPN助力YOLOv11有效涨点 引言 目标检测领域的最新进展表明,特征金字塔网络(FPN)的设计对模型性能具有决定性影响。本文详细介绍如何将**双向特征金字塔网络(BiFPN)**集成到YOLOv11的Neck部分,通过改进的多尺度特征融合机制…...

C/C++的OpenCV 进行轮廓提取
使用 C/C的OpenCV 进行轮廓提取 轮廓可以简单地描述为连接所有具有相同颜色或强度的连续点(沿着边界)的曲线。轮廓是形状分析以及对象检测和识别的有用工具。OpenCV 提供了非常方便的函数来查找和绘制轮廓。 本文将指导您完成使用 C 和 OpenCV 库从图像…...
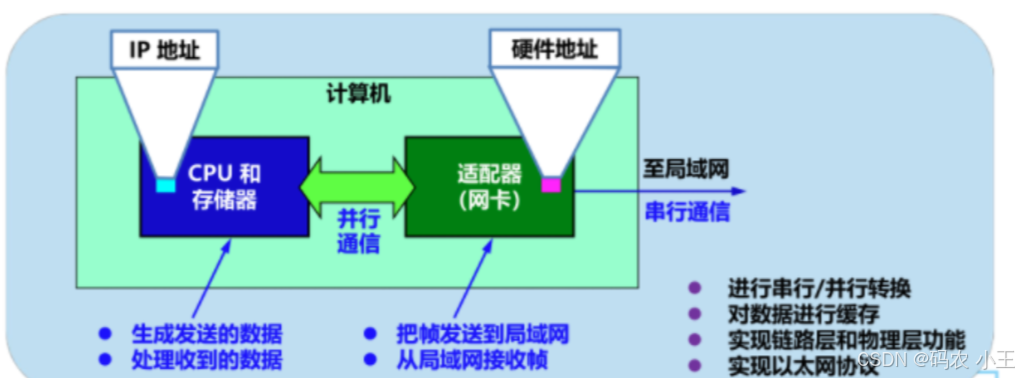
计算机网络总结(物理层,链路层)
目录 第一章 概述 1.基本概念 2.- C/S模式,B/S模式,P2P模式 3.- LAN,WAN,MAN,PAN的划分 4.电路交换与分组交换,数据报交换和虚电路交换 第二章 物理层 1.信号编码:不归零编码,曼切斯特编码 2.几种复用技术的特…...
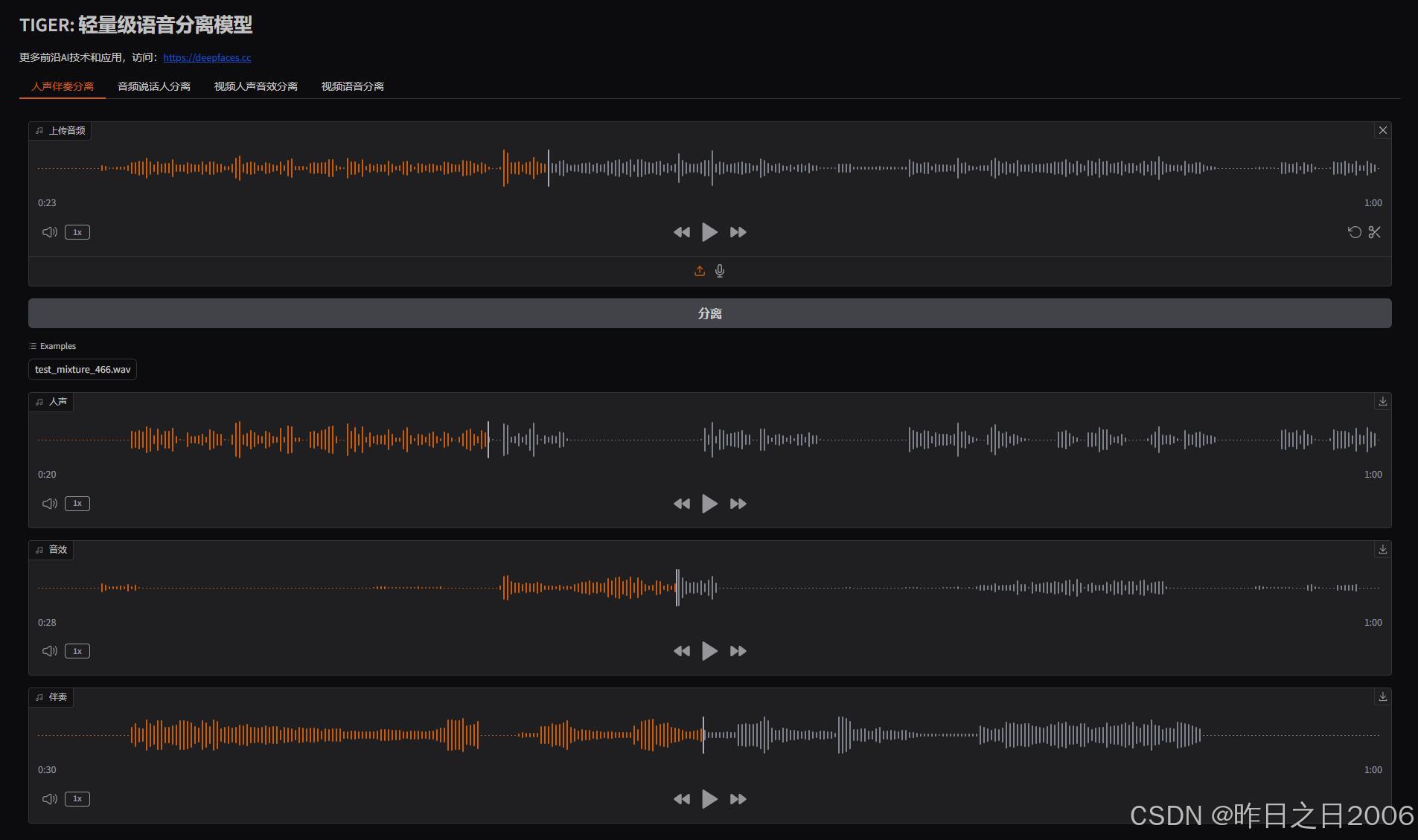
TIGER - 一个轻量高效的语音分离模型,支持人声伴奏分离、音频说话人分离等 支持50系显卡 本地一键整合包下载
TIGER 是一种轻量级语音分离模型,通过频段分割、多尺度及全频帧建模有效提取关键声学特征。该项目由来自清华大学主导研发,通过频率带分割、多尺度以及全频率帧建模的方式,有效地提取关键声学特征,从而实现高效的语音分离。 TIGER…...

yolov8,c++案例汇总
文章目录 引言多目标追踪案例人体姿态估计算法手势姿态估计算法目标分割算法 引言 以下案例,基于c,ncnn,yolov8既可以在windows10/11上部署, 也可以在安卓端部署, 也可以在嵌入式端部署, 服务器端可支持部署封装为DLL,支持c/c#/java端调用 多目标追踪案例 基于yolov8, ncnn,…...

无人机降落伞设计要点难点及原理!
一、设计要点 1. 伞体结构与折叠方式 伞体需采用轻量化且高强度的材料(如抗撕裂尼龙或芳纶纤维),并通过多重折叠设计(如三重折叠缝合)减少展开时的阻力,同时增强局部承力区域的强度。 伞衣的几何参数&am…...
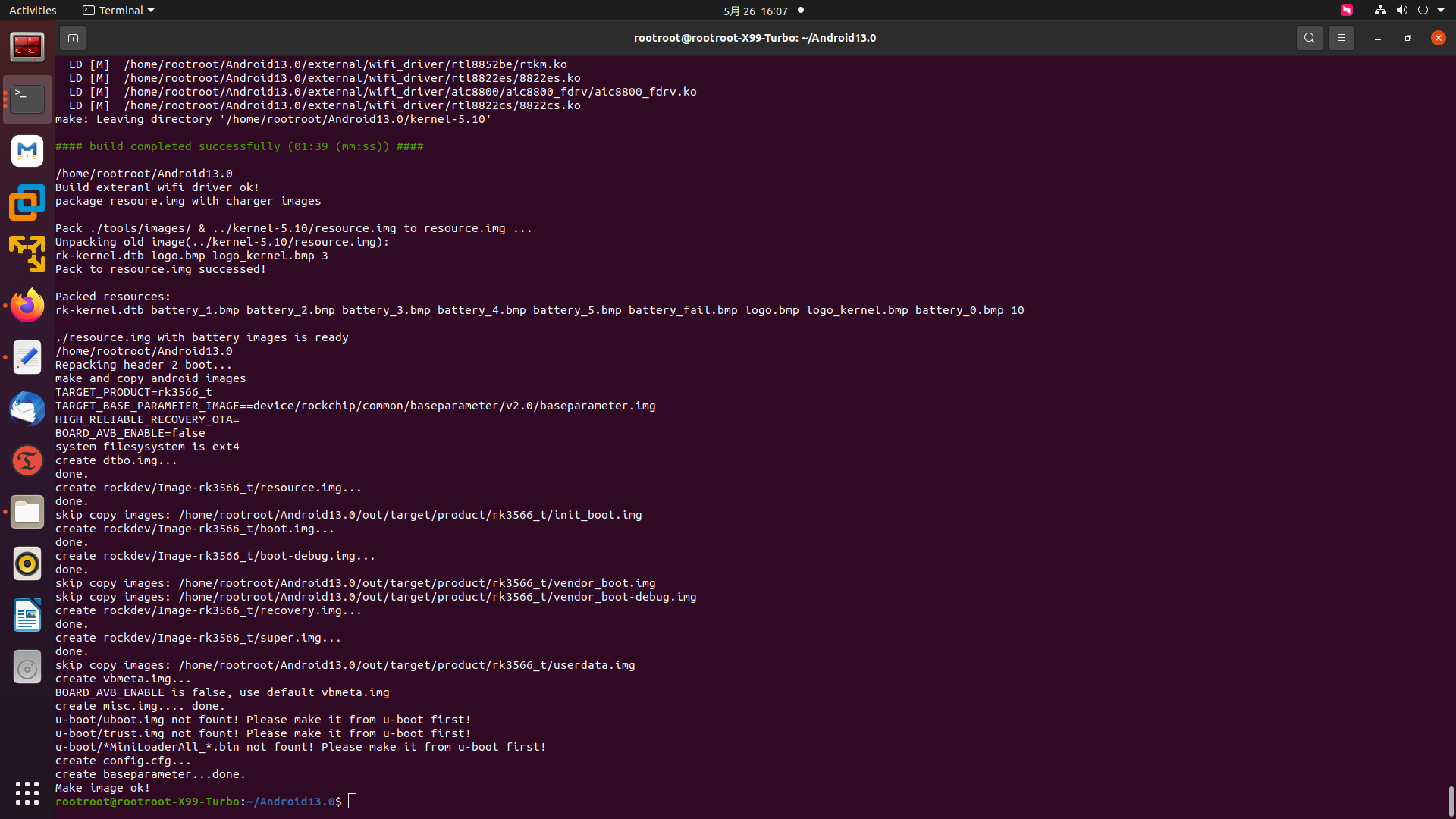
20250526给荣品PRO-RK3566的Android13单独编译boot.img
./build.sh init ./build.sh -K ./build.sh kernel 20250526给荣品PRO-RK3566的Android13单独编译boot.img 2025/5/26 15:25 缘起:需要给荣品PRO-RK3566的Android13单独编译内核,但是不想编译整个系统。于是: 如果特调试某些特别的改动/文件…...

vue3项目动态路由的相关配置踩坑记录
1.路由文件中引入store的报错解决 import { useUserStore } from /stores/user // 错误:此时 Pinia 未初始化const store useUserStore() // 报错 解决方案: import pinia,{ useUserStore } from /stores/user 或者在路由前置守卫中调用useUserSto…...

git子模块--命令--列表版
Git子模块指令查询手册 一、基本操作指令 添加子模块 git submodule add <仓库地址> [路径] 添加子模块并生成.gitmodules。 克隆含子模块项目 git clone --recursive <主仓库地址> 克隆主仓库及所有子模块。 初始化子模块 git submodule init 将.gitmodules…...
)
C++(4)
四、模板与容器 1. 模板 1.1 函数模板 #include <iostream> using namespace std;// 函数模板声明 template<typename T> // 也可使用 class T add(T a, T b) {return a b; }int main() {string a "hello";string b "world";cout <&…...
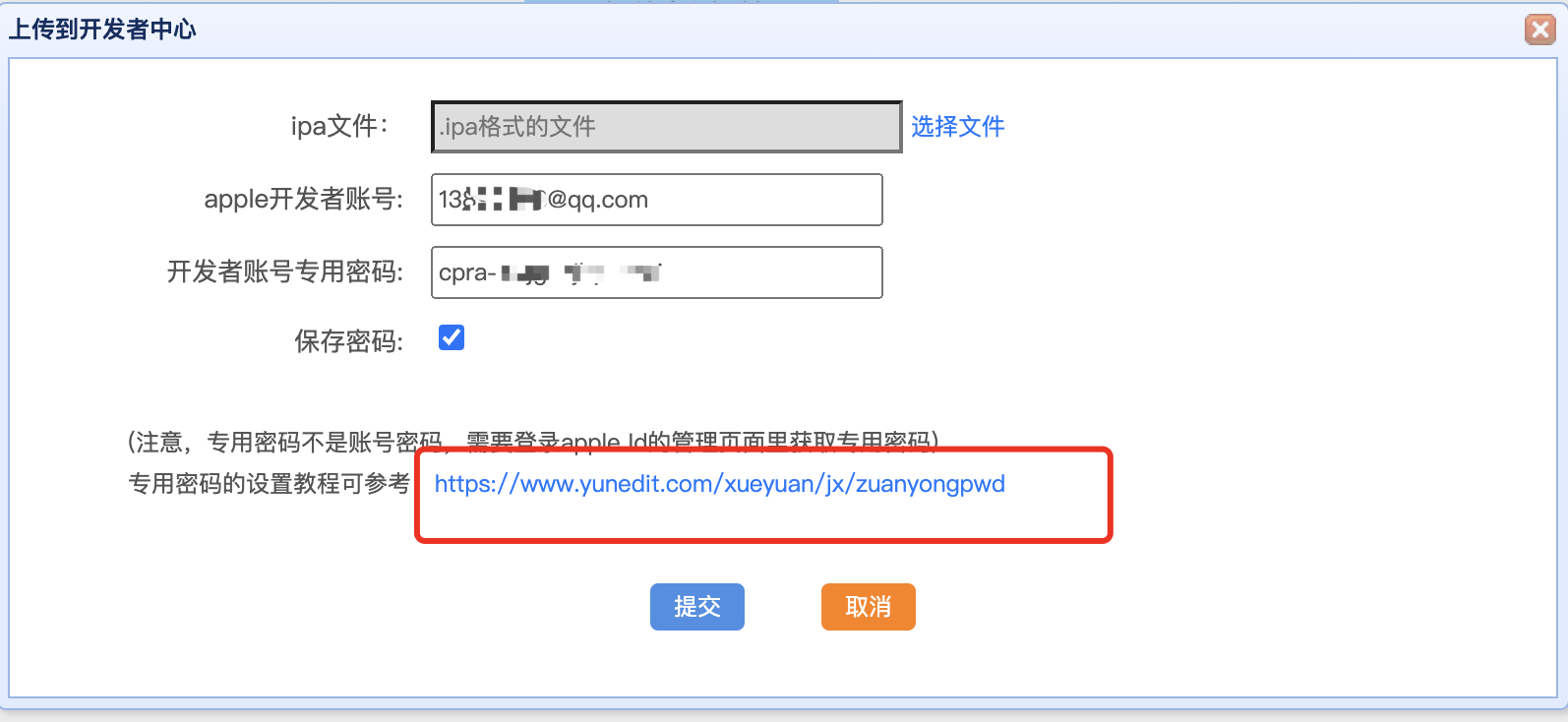
构建版本没mac上传APP方法
在苹果开发者的app store connect上架Ios应用的时候,发现需要使用xode等软件来上传iOS的APP。 但是不管是xcode也好,transporter也好,还是命令行工具也好,都必须安装在mac电脑才能使用,。 假如没有mac电脑࿰…...
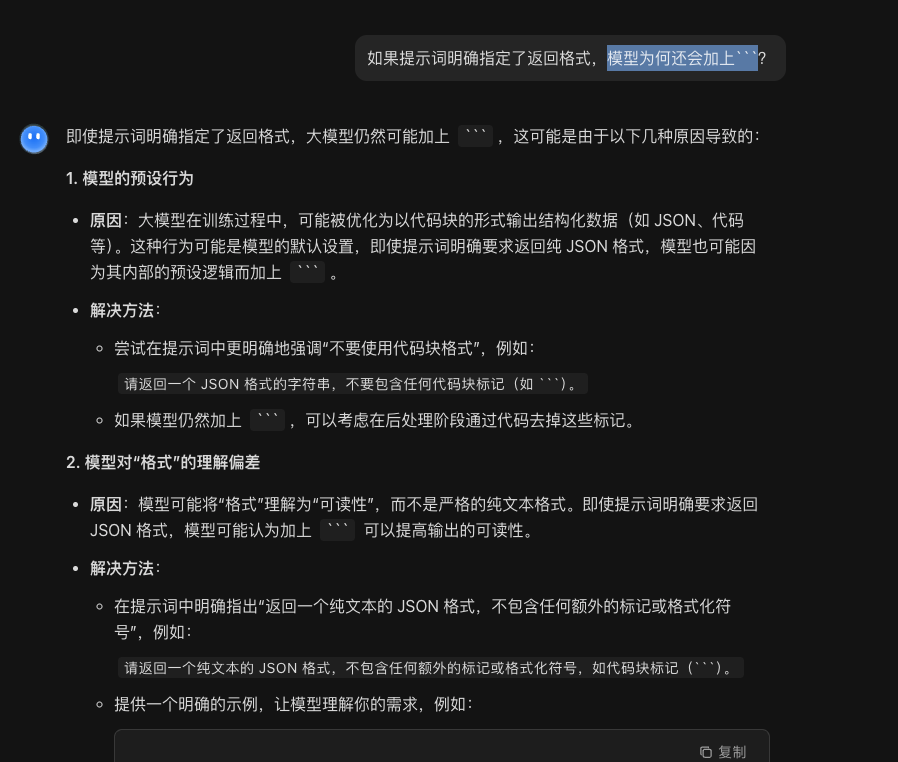
如何解决大模型返回的JSON数据前后加上```的情况
环境说明 springboot 应用使用dashscope-sdk-java对接阿里百练 deepseek v3模型 问题表现 已经指定了输出json格式,但指令不明确,输出JSON格式的写法如下 注:提示词一开始是能正常功能的,但过了几天就出现了异常,原…...

本地处理 + GPU 加速 模糊视频秒变 4K/8K 修复视频老旧素材
各位数码小达人们!你们知道吗,今天我要给大家介绍一款超厉害的工具——Video2X。它就像是一个神奇的魔法棒,能把低分辨率的视频、GIF和图像变成高清甚至4K的,而且画质细节一点都不会损失! 先来说说它的核心功能。第一…...

服务器异常数据问题解决 工具(tcpdump+wireshark+iptables)
问题: 某天一客户反馈,后台页面上显示的设备数据异常增长。现场实际只有2w台设备安装了助手(客户端),但是后台显示有16w的助手设备,并且还在持续且快速的增长。这些数据会被加载到缓存,时间久了,服务端程序…...

综合实现案例 LVS keepalived mysql 等
基于企业级高可用架构的 Linux 案例,整合 Nginx、HTTPS、LVS、Keepalived、MySQL 等服务,实现 Web 服务的负载均衡、高可用性及数据持久化。 案例场景:高可用 Web服务架构 目标 构建高可用 Web 集群,支持负载均衡和故障自动切换…...
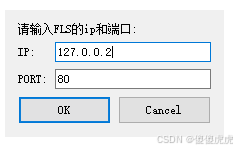
【QT】对话框dialog类封装
【QT】对话框dialog类封装 背景要点采用对输入框的信号监测实现端口和IP有效 实现 背景 在Qt 6.8.1 (MSVC 2022, x86_64)中进行编写,需要实现IP和端口号输入的弹窗,实现的方式有2种,其一,采用UI绘制,然后进行界面加载…...

2025/5/26 学习日记 基本/扩展正则表达式 linux三剑客之grep
在 Linux 系统中,正则表达式(Regular Expression可用于匹配、查找和替换符合特定模式的文本。根据语法和功能的不同,正则表达式可分为 基础正则表达式(BRE) 和 扩展正则表达式(ERE)。 基础正则…...

【后端高阶面经:消息队列篇】29、Kafka高性能探秘:零拷贝、顺序写与分区并发实战
一、 顺序写入:磁盘性能的极致挖掘 Kafka的高性能本质上源于对磁盘顺序访问的深度优化。 传统随机写入的磁盘操作需要磁头频繁寻道,机械硬盘的随机写性能通常仅为100IOPS左右,而Kafka通过追加日志(Append-Only Log)模式,将所有消息按顺序写入分区文件,使磁盘操作转化为…...

Spring Boot企业级开发五大核心功能与高级扩展实战
前言 在企业级应用开发中,Spring Boot已成为事实上的Java开发标准。本文将从企业实际需求出发,深入剖析Spring Boot五大必用核心功能,并扩展讲解三项高级开发技能,帮助开发者掌握构建健壮、高效、易维护的企业级应用的必备技术。…...

在SpringBoot项目中策略模式的使用
使用策略模式之前的代码 Overridepublic void updateExam(String id, ExamUpdateDTO examUpdateDTO) {logger.info("Service: 修改考试场次, ID: {}, 数据: {}", id, examUpdateDTO);Exam existingExam mongoDBUtils.findById(id, Exam.class);if (existingExam nu…...

在 Docker 中启动 Jupyter Notebook
文章目录 一、创建容器二、Conda安装三、安装 Jupyter四、启动 Jupyter五、注册内核来使用虚拟环境小结 一、创建容器 可以先查看宿主机8888端口是否被占用,无输出,表明端口未被任何进程占用,如果有LISTEN,可能在创建容器的时候需…...
原理与应用)
IP 地址反向解析(IP反查域名)原理与应用
一、IP 地址反向解析的原理与技术细节 IP 地址反向解析(Reverse IP Lookup)是一种将 IP 地址映射回其关联域名或主机名的网络技术,与常见的正向 DNS 解析(将域名解析为 IP 地址)形成互补。这一过程在网络安全研究、漏…...
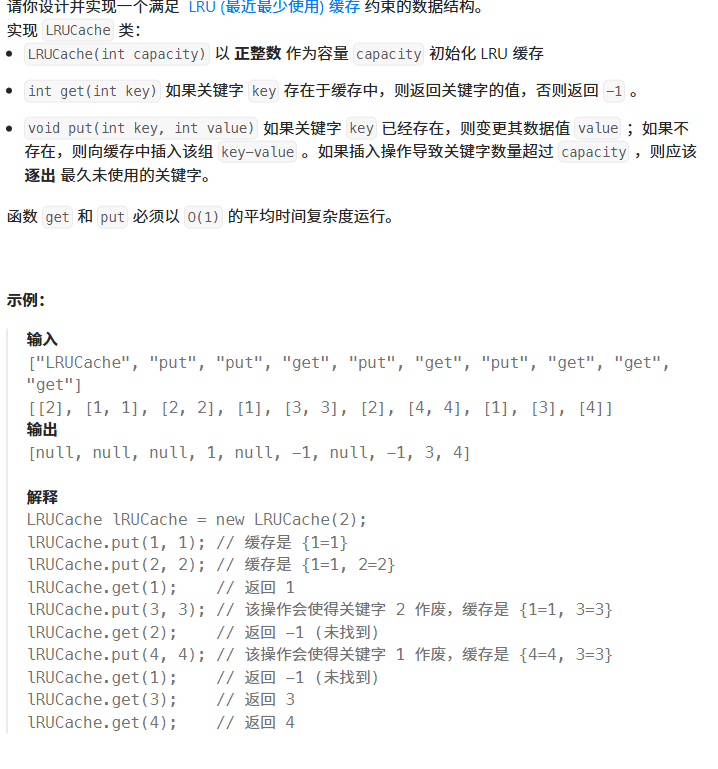
CodeTop之LRU缓存
题目链接 146. LRU 缓存 - 力扣(LeetCode) 题目解析 算法原理 我们使用双向链表哈希表的形式来模拟缓存机制 首先我们要自己实现一个双链表, 自己写一个内部类, 这个内部类记录了key,value,prev,next(前驱和后继), 后续我们就通过这个内部类来构造双…...
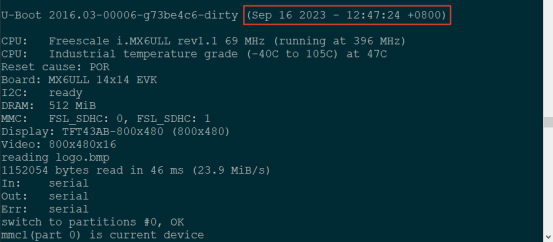
uboot常用命令之eMMC/SD卡命令
eMMC和SD卡(TF卡)是同一类设备,以下命令二者是通用,本章节主要以eMMC举例说明命令的使用。 使用help mmc可以看到mmc相关命令列表以及其对应命令用法: > help mmc 一、mmc dev 使用mmc list可以看到当前系统挂载的所有mmc设备ÿ…...