工业自动化实战:基于 VisionPro 与 C# 的机器视觉 PLC 集成方案
一、背景介绍
在智能制造领域,机器视觉检测与 PLC 控制的无缝集成是实现自动化生产线闭环控制的关键。本文将详细介绍如何使用 C# 开发上位机系统,实现 Cognex VisionPro 视觉系统与西门子 S7 PLC 的数据交互,打造高效、稳定的工业检测方案。
二、系统架构设计
1. 硬件组成
- 工业相机:Cognex DM 系列智能相机(分辨率 1280×1024,帧率 30FPS)
- 光源系统:环形 LED 光源(可调亮度,消除反光)
- PLC 控制器:西门子 S7-1200(CPU 1214C DC/DC/DC)
- 工控机:研华 IPC-610L(i7 处理器,8GB RAM,Windows 10 系统)
2. 软件架构
┌───────────────────────────────────────────┐
│ 上位机应用 (C#) │
│ ┌───────────────┐ ┌───────────────────┐ │
│ │ VisionPro接口 │ │ PLC通信模块 │ │
│ │ (Cognex DLL) │ │ (S7.NET库) │ │
│ └───────────────┘ └───────────────────┘ │
└───────────────────┬───────────────────────┘│
┌───────────────────┼───────────────────────┐
│ ▼ │
│ ┌─────────────────────┐ ┌──────────────┐ │
│ │ VisionPro软件 │ │ PLC编程软件 │ │
│ │ (Cognex Designer) │ │ (TIA Portal) │ │
│ └─────────────────────┘ └──────────────┘ │
└───────────────────┬───────────────────────┘│
┌───────────────────┼───────────────────────┐
│ ▼ │
│ ┌─────────────────────┐ ┌──────────────┐ │
│ │ 工业相机 │ │ PLC硬件 │ │
│ └─────────────────────┘ └──────────────┘ │
└───────────────────────────────────────────┘
三、VisionPro 项目开发
1. 创建检测任务
在 VisionPro Designer 中完成以下操作:
- 配置相机参数(曝光时间、增益、触发模式)
- 设计定位工具(PatMax 模式匹配)
- 添加测量工具(卡尺、边缘检测)
- 设置缺陷检测算法(Blob 分析、灰度对比)
- 导出 C# 代码模板
2. 关键代码分析
以下是 VisionPro C# 接口的核心代码:
// 初始化VisionPro应用
private CogApplication cogApp;
private CogAcqFifoTool acqFifoTool;
private CogPMAlignTool pmAlignTool;
private CogBlobTool blobTool;// 加载VPP项目文件
private void LoadVisionProProject(string projectPath)
{cogApp = new CogApplication();cogApp.LoadFromFile(projectPath);// 获取各工具引用acqFifoTool = cogApp.Tools["AcqFifoTool"] as CogAcqFifoTool;pmAlignTool = cogApp.Tools["PMAlignTool"] as CogPMAlignTool;blobTool = cogApp.Tools["BlobTool"] as CogBlobTool;
}// 执行视觉检测
public VisionResult RunInspection()
{// 触发图像采集acqFifoTool.Run();CogImage8Grey image = acqFifoTool.OutputImage as CogImage8Grey;// 执行定位pmAlignTool.InputImage = image;pmAlignTool.Run();// 执行缺陷检测blobTool.InputImage = image;blobTool.Offset = pmAlignTool.Results.GetPose(0);blobTool.Run();// 返回检测结果return new VisionResult{IsPass = blobTool.Results.GetBlobs().Count == 0,DefectCount = blobTool.Results.GetBlobs().Count,InspectionTime = DateTime.Now};
}
四、PLC 通信实现
1. 通信协议选择
采用S7.NET库实现 C# 与 Siemens S7 PLC 的通信,支持以下协议:
- S7-200 SMART:S7.NET的 S7200SmartPlc 类
- S7-1200/1500:S7.NET的 S71200Plc 类
- 通信方式:TCP/IP(默认端口 102)
2. 核心通信代码
using S7.Net;public class PlcController : IDisposable
{private Plc plc;// 初始化PLC连接public bool Connect(string ipAddress, CpuType cpuType = CpuType.S71200){try{plc = new Plc(cpuType, ipAddress, 0, 1);plc.Open();return plc.IsConnected;}catch (Exception ex){Console.WriteLine($"PLC连接失败: {ex.Message}");return false;}}// 读取PLC数据public bool[] ReadInputBits(int startAddress, int count){if (!plc.IsConnected) return null;try{var data = plc.DBRead(1, startAddress, VarType.Bit, count);return data.Cast<bool>().ToArray();}catch (Exception ex){Console.WriteLine($"读取PLC数据失败: {ex.Message}");return null;}}// 写入PLC数据public bool WriteOutputBits(int startAddress, bool[] values){if (!plc.IsConnected) return false;try{plc.DBWrite(1, startAddress, values);return true;}catch (Exception ex){Console.WriteLine($"写入PLC数据失败: {ex.Message}");return false;}}// 释放资源public void Dispose(){plc?.Close();plc?.Dispose();}
}
五、集成控制流程
1. 数据交互流程设计
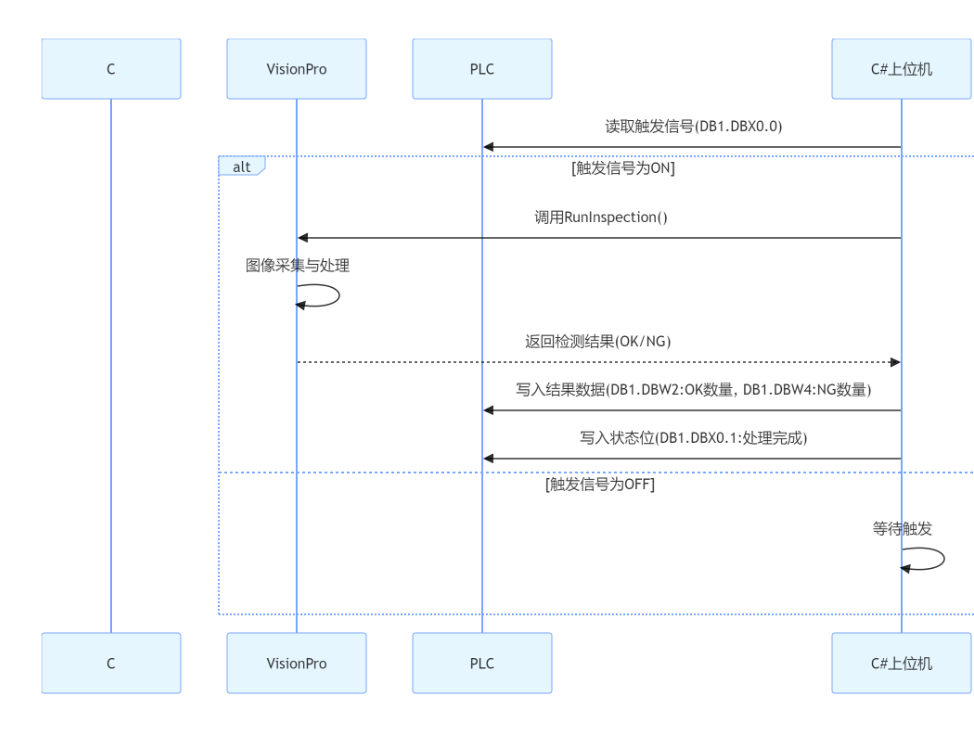
sequenceDiagramparticipant C#上位机participant VisionProparticipant PLCC#上位机->>PLC: 读取触发信号(DB1.DBX0.0)alt 触发信号为ONC#上位机->>VisionPro: 调用RunInspection()VisionPro->>VisionPro: 图像采集与处理VisionPro-->>C#上位机: 返回检测结果(OK/NG)C#上位机->>PLC: 写入结果数据(DB1.DBW2:OK数量, DB1.DBW4:NG数量)C#上位机->>PLC: 写入状态位(DB1.DBX0.1:处理完成)else 触发信号为OFFC#上位机->>C#上位机: 等待触发end
2. 主控制逻辑
public class VisionSystem
{private readonly PlcController plcController;private readonly VisionProController visionProController;private Timer inspectionTimer;// 系统初始化public void Initialize(string plcIp, string visionProProjectPath){// 初始化PLC控制器plcController = new PlcController();plcController.Connect(plcIp);// 初始化VisionPro控制器visionProController = new VisionProController();visionProController.LoadVisionProProject(visionProProjectPath);// 设置定时检查PLC触发信号inspectionTimer = new Timer(CheckTriggerSignal, null, 0, 100); // 每100ms检查一次}// 检查PLC触发信号private void CheckTriggerSignal(object state){if (!plcController.IsConnected) return;// 读取PLC触发位(DB1.DBX0.0)var triggerBits = plcController.ReadInputBits(0, 1);if (triggerBits != null && triggerBits[0]){// 执行视觉检测var result = visionProController.RunInspection();// 写入检测结果到PLCplcController.WriteOutputBits(2, new bool[] { result.IsPass }); // DB1.DBX2.0:检测结果plcController.WriteOutputBits(3, new bool[] { false }); // DB1.DBX3.0:重置触发信号}}
}
六、实战案例:电子元件外观检测
1. 项目需求
- 检测 PCB 板上的 IC 芯片是否存在引脚变形、缺件等缺陷
- 检测速度:≥10 件 / 秒
- 缺陷精度:≥0.1mm
2. 解决方案
- 硬件配置:Basler ace 相机 + 环形光源,Siemens S7-1200 PLC 控制流水线
- 软件实现:
- VisionPro:使用 PatMax 定位芯片,Blob 分析检测引脚缺陷
- C# 上位机:通过S7.NET与 PLC 通信,实现触发控制与结果反馈
- 性能指标:检测准确率 99.8%,单帧处理时间≤80ms
3. 界面设计
csharp
// 创建WPF界面显示检测结果
public partial class MainWindow : Window
{private VisionSystem visionSystem;public MainWindow(){InitializeComponent();visionSystem = new VisionSystem();}private void btnStart_Click(object sender, RoutedEventArgs e){// 启动系统visionSystem.Initialize(txtPlcIp.Text, txtVisionProPath.Text);lblStatus.Content = "系统运行中...";}// 实时更新检测结果显示private void UpdateResultDisplay(VisionResult result){Dispatcher.Invoke(() =>{imgResult.Source = result.Image;lblResult.Content = result.IsPass ? "合格" : "不合格";lblDefectCount.Content = result.DefectCount.ToString();});}
}
七、常见问题与解决方案
-
通信不稳定
- 原因:网络波动、PLC 程序冲突
- 解决方案:增加心跳包机制,设置超时重连,优化 PLC 程序中的通信处理。
-
视觉检测误判
- 原因:光照变化、相机抖动
- 解决方案:添加动态阈值算法,使用机械臂固定相机位置,增加光源稳定性。
-
系统响应延迟
- 原因:上位机性能不足、算法复杂度高
- 解决方案:升级硬件配置,优化 VisionPro 算法(减少不必要的工具),采用多线程处理。
八、总结与展望
本文详细介绍了基于 VisionPro 和 C# 实现机器视觉与 PLC 集成的完整方案,包括系统架构设计、VisionPro 项目开发、PLC 通信实现及实际案例应用。通过这种集成方式,可显著提高工业生产线的自动化水平和检测精度。
未来趋势方面,结合深度学习的缺陷检测(如使用 YOLO 模型)和基于 OPC UA 的跨平台通信将成为主流,进一步提升智能制造的柔性化和智能化程度。
参考文献
- Cognex VisionPro 官方文档
- S7.NET开源库文档(GitHub - S7NetPlus/s7netplus: S7.NET+ -- A .NET library to connect to Siemens Step7 devices)
- 西门子 S7 PLC 通信协议规范
相关文章:
工业自动化实战:基于 VisionPro 与 C# 的机器视觉 PLC 集成方案
一、背景介绍 在智能制造领域,机器视觉检测与 PLC 控制的无缝集成是实现自动化生产线闭环控制的关键。本文将详细介绍如何使用 C# 开发上位机系统,实现 Cognex VisionPro 视觉系统与西门子 S7 PLC 的数据交互,打造高效、稳定的工业检测方案。…...
C++ —— B/类与对象(中)
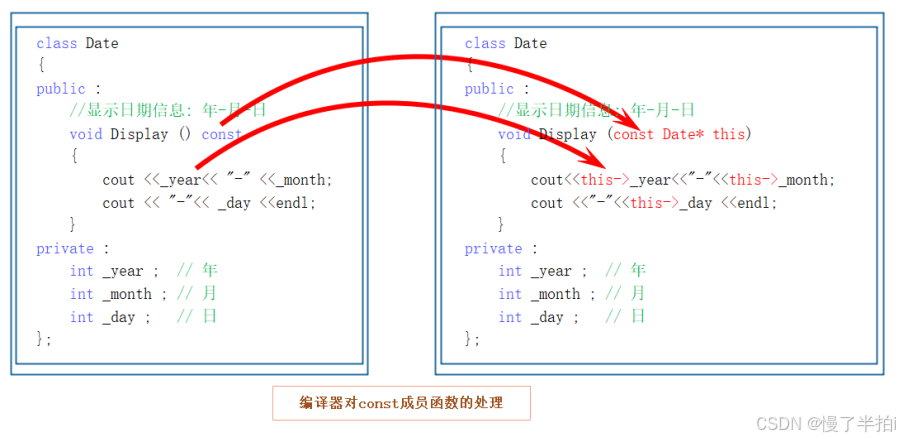
🌈个人主页:慢了半拍 🔥 创作专栏:《史上最强算法分析》 | 《无味生》 |《史上最强C语言讲解》 | 《史上最强C练习解析》|《史上最强C讲解》 🏆我的格言:一切只是时间问题。 目录 一、类的6个默认成员…...

Java网络编程与Socket安全权限详解
Socket安全权限控制 Java通过java.net.SocketPermission类实现对网络套接字访问的细粒度控制。该权限管理机制通常在Java策略文件中配置,其标准授权语法格式如下: grant {permission java.net.SocketPermission"target", "actions"; };目标主机与端口规…...

AXI协议乱序传输机制解析:提升SoC性能的关键设计
AXI 协议 Out-of-Order 传输机制 概述 AXI (Advanced eXtensible Interface) 协议支持乱序传输 (Out-of-Order) 机制,这是一种重要的性能优化特性,允许数据传输不按照发起顺序完成,从而提高总线带宽利用率和系统整体性能。 基本原理 通道…...
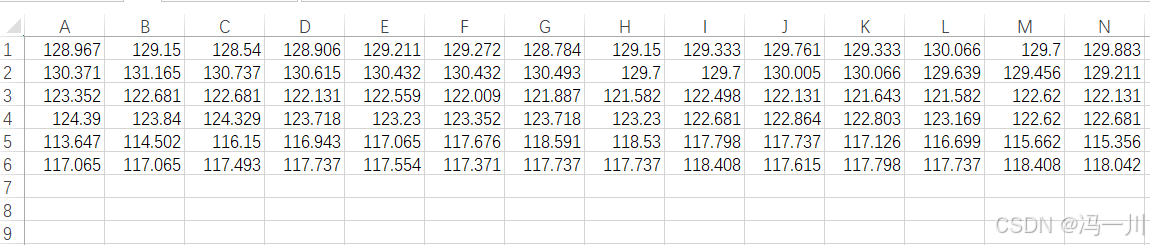
Qt实现csv文件按行读取的方式
Qt实现csv文件按行读取的方式 场景:我有一个保存数据的csv文件,文件内保存的是按照行保存的数据,每行数据是以逗号为分隔符分割的文本数据。如下图所示: 现在,我需要按行把这些数据读取出来。 一、使用QTextStream文本流的方式读取 #include <QFile>void readfil…...

分库分表后的 ID 生成方案
分库分表后的 ID 生成方案 一、问题背景 在分布式系统中,当单表数据量超过千万级时,通常会采用分库分表策略。此时传统的自增ID方案会面临以下问题: 不同分片可能生成相同ID(冲突)单调递增特性被破坏全局唯一性难以保证关键结论:分库分表环境下,ID生成必须满足全局唯一…...

进行性核上性麻痹健康护理全指南:从症状管理到生活照护
进行性核上性麻痹(PSP)是一种罕见的神经退行性疾病,主要影响运动、平衡及眼球运动功能,常表现为步态不稳、吞咽困难、眼球上视受限、情绪改变等。由于目前尚无根治方法,科学的健康护理对延缓病情进展、提升患者生活质量…...
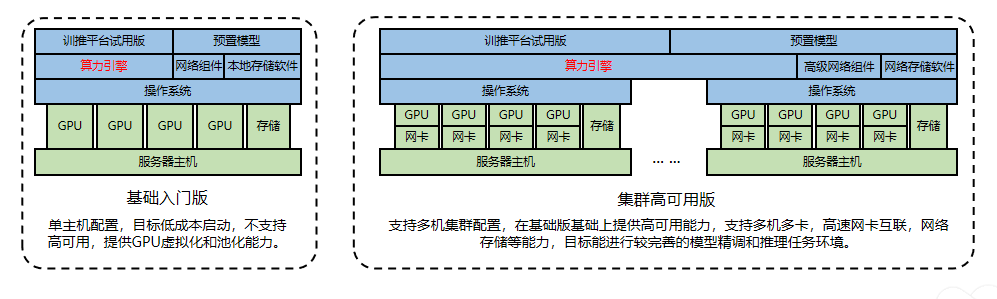
openFuyao开源发布,建设多样化算力集群开源软件生态
openFuyao 开源发布 随着 AI 技术的高速发展,算力需求呈爆发式增长,集群已成为主流生产方式。然而,当前集群软件生态发展滞后于硬件系统,面临多样化算力调度困难、超大规模集群软件支撑不足等挑战。这些问题的根源在于集群生产的…...
第四十五节:目标检测与跟踪-Meanshift/Camshift 算法
引言 在计算机视觉领域,目标跟踪是实时视频分析、自动驾驶、人机交互等应用的核心技术之一。Meanshift和Camshift算法作为经典的跟踪方法,以其高效性和实用性广受关注。本文将从原理推导、OpenCV实现到实际案例,全面解析这两种算法的核心思想与技术细节。 一、Meanshift算法…...

Docker Desktop无法在windows低版本进行安装
问题描述 因工作需要,现在一台低版本的window系统进行Docker Desktop的安装,但是安装过程当中出现了报错信息 系统版本配置 原因分析: 关于本机查看了系统的版本号,版本号如下为1909,但是docker Desktop要求的最低的win10版本…...

SQL Server 简介和与其它数据库对比
SQL Server 是微软(Microsoft)开发的一种 关系型数据库管理系统(RDBMS),全称是 Microsoft SQL Server。 🔍 SQL Server 是什么? SQL Server 是一个功能强大、企业级的数据库平台,用…...
2025年- H56-Lc164--200.岛屿数量(图论,深搜)--Java版
1.题目描述 2.思路 (1)主函数,存储图结构 (2)主函数,visit数组表示已访问过的元素 (3)辅助函数,用递归(深搜),遍历以已访问过的元素&…...
自证式推理训练:大模型告别第三方打分的新纪元
1. 传统验证体系的困境与技术跃迁的必然性 1.1 传统验证器的局限性 现有强化学习框架依赖显式验证器对答案进行二值化判定,这种模式在数学、代码等可验证领域表现优异。某厂内部数据显示,传统R1-Zero方法在代码生成任务中准确率达92%,但切换…...
vue2使用el-tree实现两棵树间节点的拖拽复制
原文链接:两棵el-tree的节点跨树拖拽实现 参照这篇文章,把它做成组件,新增左侧树(可拖出)被拖节点变灰提示; 拖拽中: 拖拽后: TreeDragComponent.vue <template><!-- …...

前端开发中 <> 符号解析问题全解:React、Vue 与 UniApp 场景分析与解决方案
前端开发中 <> 符号解析问题全解:React、Vue 与 UniApp 场景分析与解决方案 在前端开发中,<> 符号在 JSX/TSX 环境中常被错误解析为标签而非比较运算符或泛型,导致语法错误和逻辑异常。本文全面解析该问题在不同框架中的表现及解…...

封装一个Qt调用动态库的类
封装一个Qt调用动态库的类 由于我的操作系统Ubuntu系统,我就以Linux下的动态库.so为例了,其实windows上的dll库调用方式是一样的,如果你的Qt项目是windows的,这篇文章代码可以直接使用。 一般情况下我们对外输出都是以动态库的形式封装的,这样我们更新版本的时候就很方便…...

[python] 最大公约数 和 最小公倍数
在Python中,计算最大公约数(GCD)和最小公倍数(LCM)的库函数主要来自math模块: 最大公约数(GCD) 使用math.gcd(a, b)函数,支持两个整数参数(Python 3.5&…...

如何在 Django 中集成 MCP Server
目录 背景说明第一步:使用 ASGI第二步:修改 asgi.py 中的应用第三步:Django 数据的异步查询 背景说明 有几个原因导致 Django 集成 MCP Server 比较麻烦 目前支持的 MCP 服务是 SSE 协议的,需要长连接,但一般来讲 Dj…...
从零开始的云计算生活——第十一天,知识延续,程序管理。
一故事背景 今日整体内容是第十天的剩余部分再加上程序管理的开头部分,详细可以回到第十天看新增加内容,现在开始讲解新内容。 二Linux程序与进程 1程序,进程,线程的概念 程序:是一段静态的代码,它是应用软件执行的蓝本。程序…...

React 事件处理与合成事件机制揭秘
引言 在现代前端开发的技术生态中,React凭借其高效的组件化设计和声明式编程范式,已成为构建交互式用户界面的首选框架之一。除了虚拟DOM和单向数据流等核心概念,React的事件处理系统也是其成功的关键因素。 这套系统通过"合成事件&qu…...

【React】jsx 从声明式语法变成命令式语法
在 React 中,JSX 是一种声明式的语法扩展,它使得开发者能够以类似 HTML 的方式描述用户界面。 然而,在某些情况下,可能希望将 JSX 转换为命令式语法,以获得更精细的控制或满足特定的需求。(ckeditor.com) JSX 到命令式…...
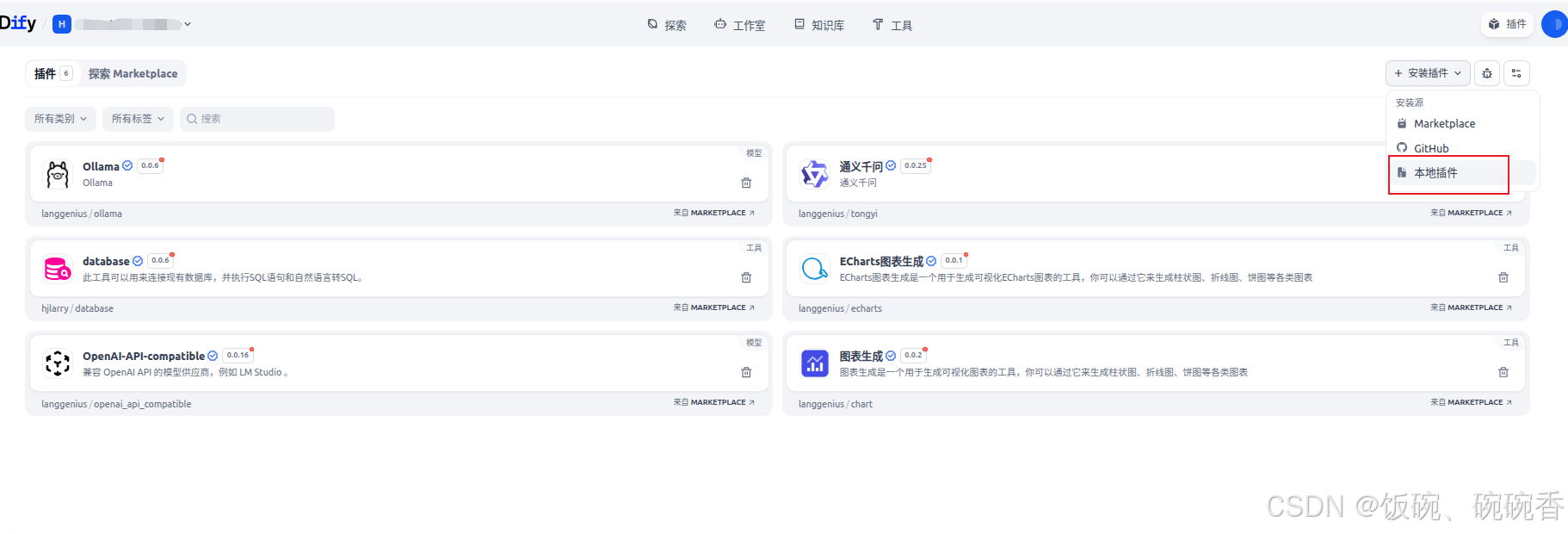
【Dify学习笔记】:Dify离线安装插件教程
Dify离线安装插件教程 1.本地下载插件 插件点击详情页面,安装右边的下载按钮,下载到本地 2.dify插件打包工具 dify-plugin-repackaging 下载后,进入到工具所在目录dify-plugin-repackaging/ git clone https://github.com/junjiem/dif…...

基于c++11重构的muduo核心库项目梳理
代码梳理 Thread创建与分配 event_channel回调函数 在muduo中,有三种类型的channel,包括 事件channel(event_channel) 这个就是普通的IO事件channel,当监听到Tcp连接有读、写、关闭、错误事件的时候,event_channel活跃accept_c…...
)
GitHub 趋势日报 (2025年05月29日)
📊 由 TrendForge 系统生成 | 🌐 https://trendforge.devlive.org/ 🌐 本日报中的项目描述已自动翻译为中文 📈 今日获星趋势图 今日获星趋势图 1864 agenticSeek 753 langflow 749 n8n 736 prompt-eng-interactive-tutorial 42…...

Oracle 19c导入数据出现ORA-56935 ORA-39065
Oracle 19c导入数据出现ORA-56935 ORA-39065 错误内容: $ impdp \sys/xxxsjztncdb as sysdba\ dumpfileyksf0529.dmp logfileimpsjzbicd_0529.log directorySJZT TABLE_EXISTS_ACTIONtruncate parallel2Import: Release 19.0.0.0.0 - Production on Thu May 29 15…...

Java大师成长计划之第35天:未来展望与个人总结
引言 作为一门历史悠久的编程语言,Java自1995年问世以来,经历了多个版本的迭代与演进,依然在当今技术生态中占据着重要地位。从早期的Java SE、Java EE到后来的Java Spring框架,再到现代的微服务架构与云原生应用,Jav…...

7:OpenCV—图像形态学处理
OpenCV的形态学操作(对象图像进行处理) 包括图像的**腐蚀**、**膨胀**、**开**、**闭**、**形态学梯度、顶帽、黑帽、分支主题、结构元素**等操作。 1.1、膨胀 用33的核去扫描二值图像,当核与图像中的前景像素(值为1的像素)有**交集**时&…...

远控安全金标准,ToDesk、向日葵、网易UU安全功能盘点,是否能攻破防线
目录 一、引言二、设备授权管理2.1、二次验证2.2、访问权限设置2.3、黑/白名单功能 三、远程连接与数据传输3.1、身份认证强度3.2、数据传输加密能力 四、隐私安全功能4.1、隐私屏/黑屏功能对比4.2、风险提醒消息 五、主动防诈保护5.1、24小时防诈等待期5.2、金融类窗口识别与隐…...
终端没有5G图标-不支持特定NSA频段组合
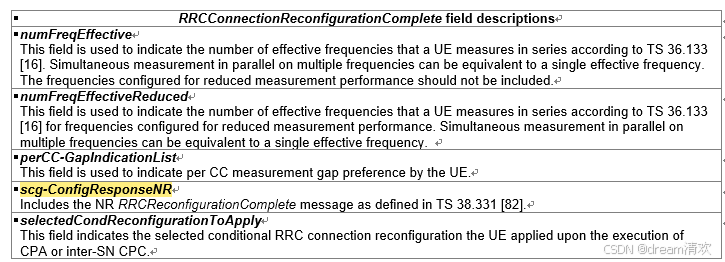
某样机没有5G图标,而对比机有5G图标。 step1: 对比机工作在5G NSA上 从android日志可以看到终端工作在b28n78的NSA双载波下 05-06 14:38:51.993097 1582 1661 D RILJ : [UNSL]< UNSOL_PHYSICAL_CHANNEL_CONFIG [ { mConnectionStatusPrimaryS…...

Netty 实战篇:为 Netty RPC 框架引入调用链追踪,实现链路透明化
本文将为 RPC 框架集成调用链追踪功能,支持链路 ID 透传、服务调用耗时分析、错误定位等,打通链路透明化的“最后一公里”。 一、为什么需要链路追踪? 在微服务环境中,一个请求可能会经过多个服务节点: 客户端 → 服…...