Ubuntu 24.04 LTS 和 ROS 2 Jazzy 环境中使用 Livox MID360 雷达
本文介绍如何在 Ubuntu 24.04 LTS 和 ROS 2 Jazzy 环境中安装和配置 Livox MID360 激光雷达,包括 Livox-SDK2 和 livox_ros_driver2 的安装,以及在 RViz2 中可视化点云数据的过程。同时,我们也补充说明了如何正确配置 IP 地址以确保雷达与主机通讯正常。
1. 安装 Livox-SDK2
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd Livox-SDK2/
mkdir build
cd build
cmake .. && make -j
sudo make install
编译前修改头文件
为避免某些版本下的编译错误,请在以下两个文件顶部添加:
#include <cstdint>
sdk_core/comm/define.hsdk_core/logger_handler/file_manager.h
2. 安装 livox_ros_driver2
mkdir -p livox_ws/src
cd livox_ws/src/
git clone https://github.com/Livox-SDK/livox_ros_driver2.git
cd livox_ros_driver2
./build.sh humble
处理 PCL 相关依赖问题
如果编译报错提示缺少 PCL 相关依赖,请执行:
sudo apt install libpcl-dev ros-jazzy-pcl-ros
./build.sh humble
3. 配置 Livox MID360 网络参数
Livox MID360 是以太网雷达,在使用前需要配置 JSON 文件中的 IP 信息,确保雷达和主机网络通信正常。
示例配置(MID360_config.json):
{"lidar_summary_info" : {"lidar_type": 8},"MID360": {"lidar_net_info" : {"cmd_data_port": 56100,"push_msg_port": 56200,"point_data_port": 56300,"imu_data_port": 56400,"log_data_port": 56500},"host_net_info" : {"cmd_data_ip" : "192.168.1.10","cmd_data_port": 56101,"push_msg_ip": "192.168.1.10","push_msg_port": 56201,"point_data_ip": "192.168.1.10","point_data_port": 56301,"imu_data_ip" : "192.168.1.10","imu_data_port": 56401,"log_data_ip" : "","log_data_port": 56501}},"lidar_configs" : [{"ip" : "192.168.1.142","pcl_data_type" : 1,"pattern_mode" : 0,"extrinsic_parameter" : {"roll": 0.0,"pitch": 0.0,"yaw": 0.0,"x": 0,"y": 0,"z": 0}}]
}
IP 设置说明:
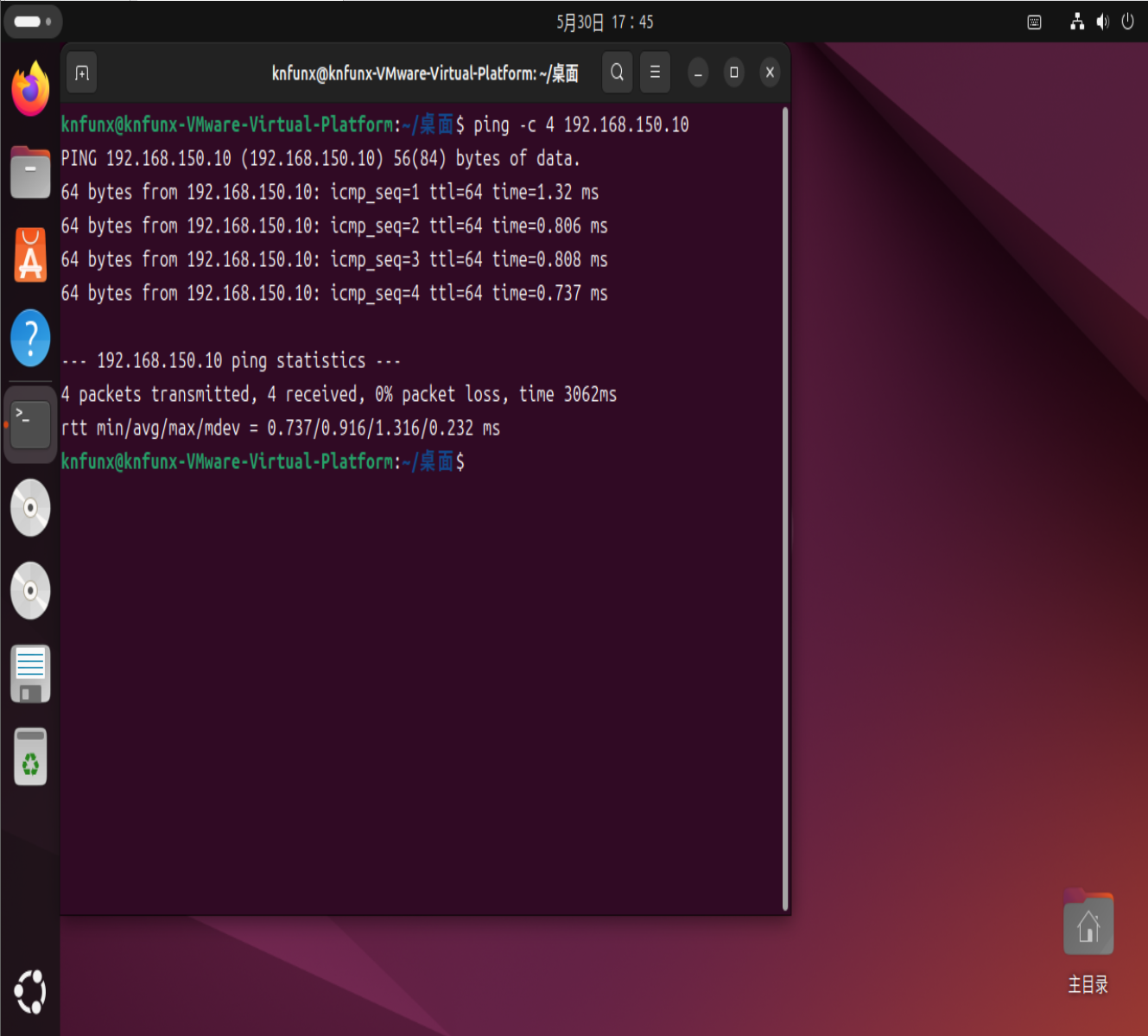
lidar_configs[].ip:雷达设备的 IP(例如192.168.1.142),应与实际设备保持一致。host_net_info.*_ip:你的主机 IP 地址(如192.168.1.10),需与雷达处于同一子网。- 设置完成后,确保网络配置正确,使用
ping 192.168.1.142测试连通性。
4. 可视化点云数据(RViz2)
然后运行:
ros2 launch livox_ros_driver2 rviz_MID360_launch.py
在 RViz2 中:
- 设置
Fixed Frame为livox_frame - 添加
PointCloud2类型的显示器,选择/livox/lidar
结语
通过以上步骤,你可以在 ROS 2 Jazzy 环境中成功运行 Livox MID360 激光雷达,获取点云数据并在 RViz2 中可视化。关键在于正确配置 IP 地址与网络端口,确保主机和雷达设备之间的通信顺畅。
参考链接:https://qiita.com/porizou1/items/f2123c16af3f86200a06
相关文章:

Ubuntu 24.04 LTS 和 ROS 2 Jazzy 环境中使用 Livox MID360 雷达
本文介绍如何在 Ubuntu 24.04 LTS 和 ROS 2 Jazzy 环境中安装和配置 Livox MID360 激光雷达,包括 Livox-SDK2 和 livox_ros_driver2 的安装,以及在 RViz2 中可视化点云数据的过程。同时,我们也补充说明了如何正确配置 IP 地址以确保雷达与主机…...
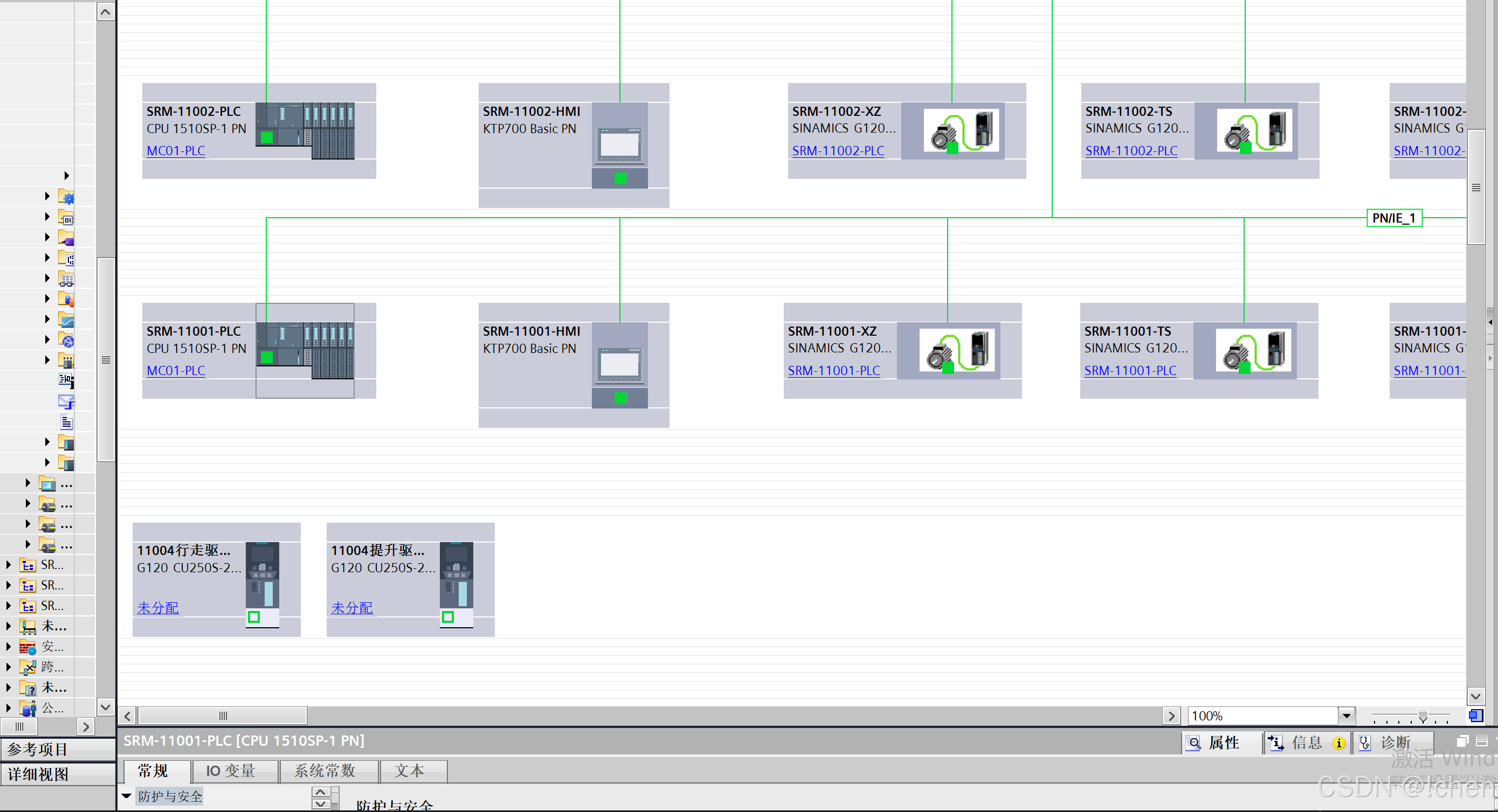
自动化立体仓库堆垛机SRM控制系统FC19手动控制功能块开发
1、控制系统手动控制模块HMI屏幕设计如下图 屏幕分为几个区域:状态显示区、控制输入区、导航指示区、报警信息区。状态显示区需要实时反馈堆垛机的位置、速度、载货状态等关键参数。控制输入区要有方向控制按钮,比如前后左右移动,升降控制,可能还需要速度调节的滑块或选择按…...
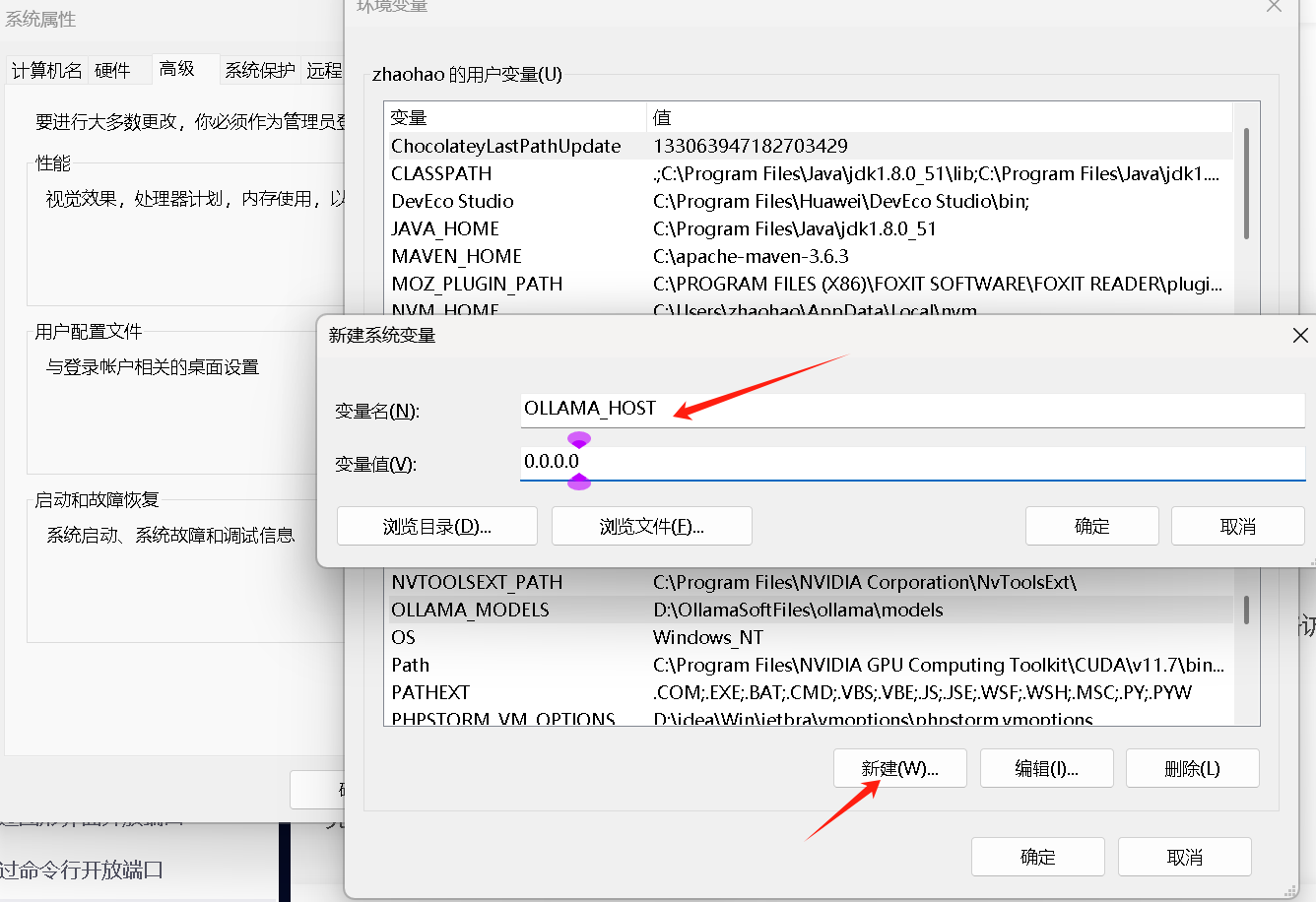
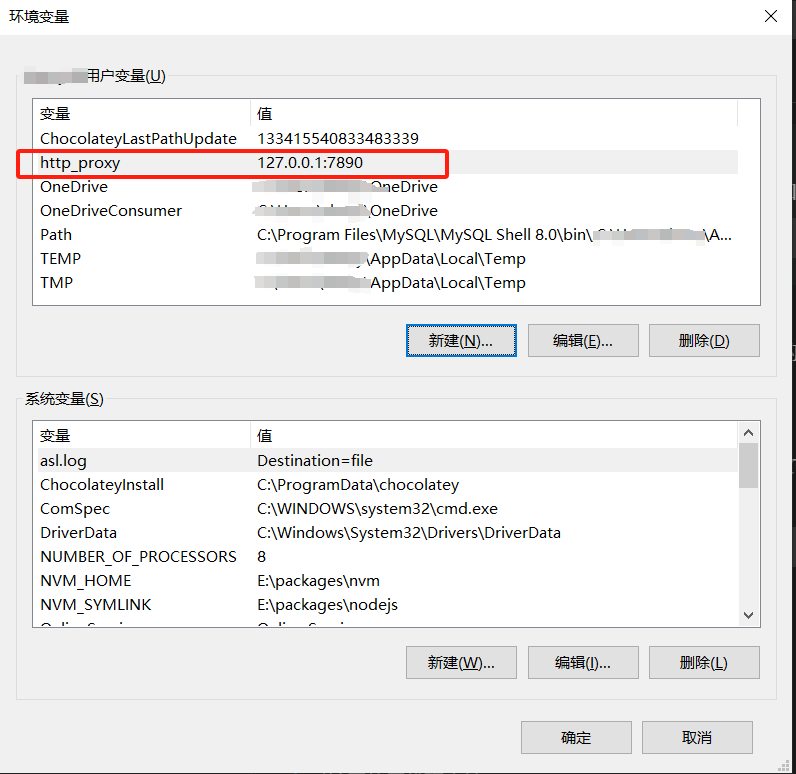
Ollama(1)知识点配置篇
ollama已经成功安装成功后,通常大家会对模型的下载位置和访问权限进行配置 1.模型下载位置修改 都是修改系统环境变量。 (1)默认下载位置 macOS: ~/.ollama/modelsLinux: /usr/share/ollama/.ollama/modelsWindows: C:\Users\你的电脑用户…...
VMware Workstation虚拟系统设置双网口
一.设置windows11系统VMware Network Adapter VMnet1。 1.进入到网络和Internet -> 高级网络设置 2.找到VMware Network Adapter VMnet1,进入到“更多配置选项”并“编辑”。 3.进入到属性,双击“Interenet协议版本4(TCP/IPv4ÿ…...

Qt基础终结篇:从文件操作到多线程异步UI,深度解析核心要点
文章目录 前言一、QFileDialog 文件对话框二、QFileInfo 文件信息类三、QFile 文件读写类四、UI与耗时操作:避免UI卡顿与程序未响应五、多线程六、异步刷新与线程通信总结 前言 上一篇文章,我们已经把qt的基础知识讲解的差不多了。本文我们将继续进行qt…...

ubuntu中,文本编辑器nano和vim区别,vim的用法
目录 一.区别1.介绍2.适用场景3. 配置与个性化1) nano:2)Vim: 二.Vim1、Vim 的安装与启动2、Vim 的三种模式 (普通模式、插入模式、命令行模式)3、Vim 的常用操作4、Vim 的配置5、Vim 的高级功能 三.nano使…...

山洪灾害声光电监测预警解决方案
一、方案背景 我国是一个多山的国家,山丘区面积约占国土面积的三分之二。每年汛期,受暴雨等因素影响,极易引发山洪和泥石流。山洪、泥石流地质灾害具有突发性、流速快、流量大、物质容量大和破坏力强等特点,一旦发生,将…...
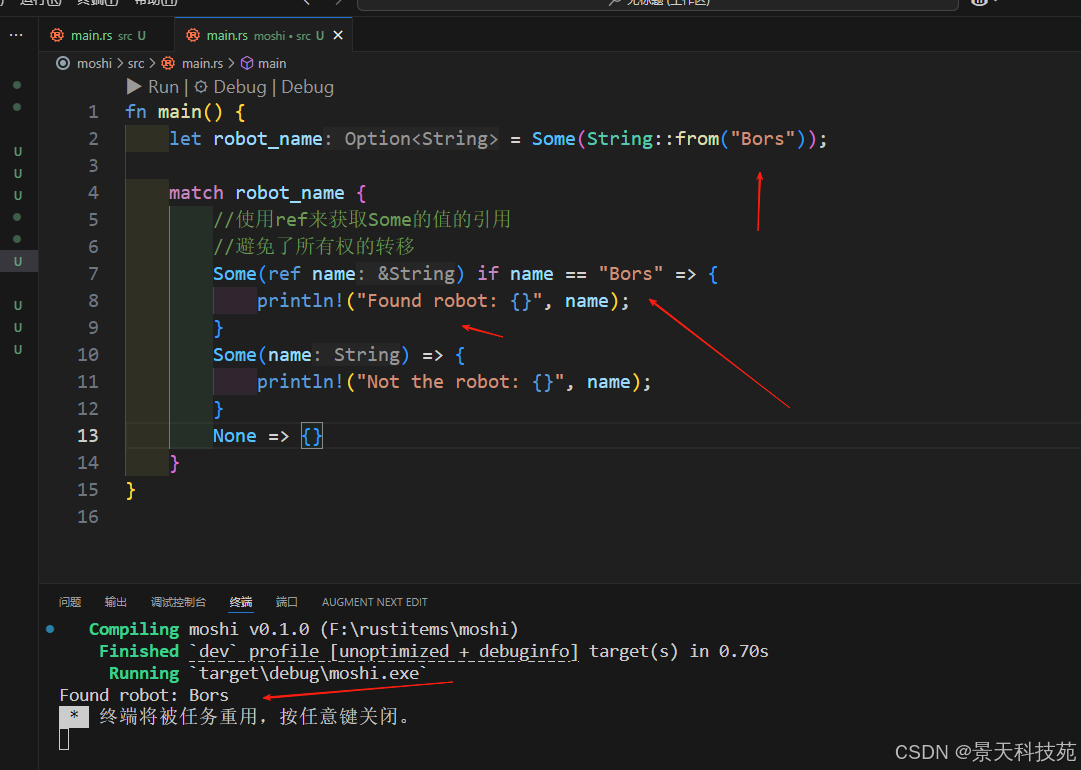
【Rust模式与匹配】Rust模式与匹配深入探索与应用实战
✨✨ 欢迎大家来到景天科技苑✨✨ 🎈🎈 养成好习惯,先赞后看哦~🎈🎈 🏆 作者简介:景天科技苑 🏆《头衔》:大厂架构师,华为云开发者社区专家博主,…...

React从基础入门到高级实战:React 高级主题 - React Concurrent 特性:深入探索与实践指南
React Concurrent 特性:深入探索与实践指南 引言 随着Web应用对用户体验的要求日益提高,React在2025年的技术环境中引入了并发渲染(Concurrent Rendering)这一革命性特性,旨在提升应用的响应速度和交互流畅度。并发渲…...
electron安装报错处理
electron安装报错 解决方法: 修改 C:\Users\用户名.npmrc下配置文件 添加代码 electron_mirrorhttps://cdn.npmmirror.com/binaries/electron/ electron_builder_binaries_mirrorhttps://npmmirror.com/mirrors/electron-builder-binaries/最后代码 registryhtt…...
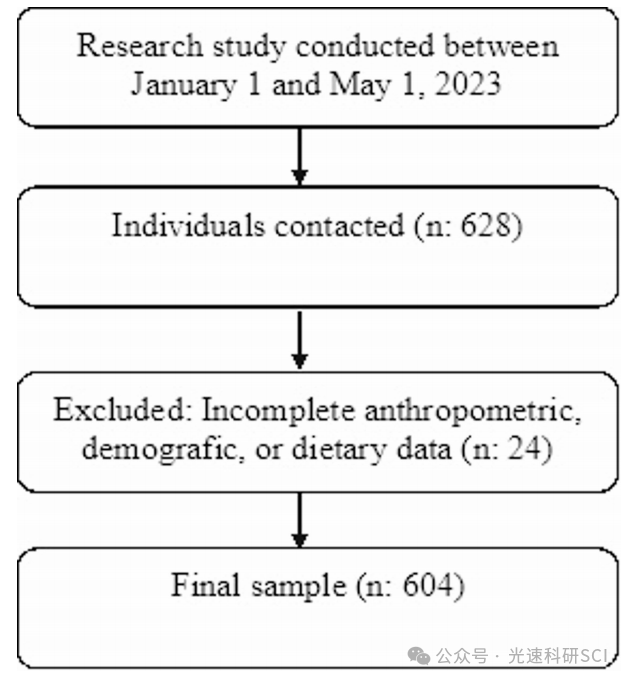
NHANES指标推荐:CQI
文章题目:The impact of carbohydrate quality index on menopausal symptoms and quality of life in postmenopausal women 中文标题:碳水化合物质量指数对绝经后妇女更年期症状和生活质量的影响 发表杂志:BMC Womens Health 影响因子&…...

【OpenHarmony】【交叉编译】使用gn在Linux编译3568a上运行的可执行程序
linux下编译arm64可执行程序 一.gn ninja安装二.交叉编译工具链安装1.arm交叉编译工具2.安装arm64编译器 三. gn文件添加arm及arm64工具链四.编译验证 本文以gn nijia安装中demo为例,将其编译为在arm64(rk_3568_a开发板)环境下可运行的程序 一.gn ninja安装 安装g…...

Med-R1论文阅读理解-1
论文总结:Med-R1: Reinforcement Learning for Generalizable Medical Reasoning in Vision-Language Models 论文写了什么? 本文提出了一种名为 Med-R1 的新框架,旨在通过强化学习(Reinforcement Learning, RL)提升…...
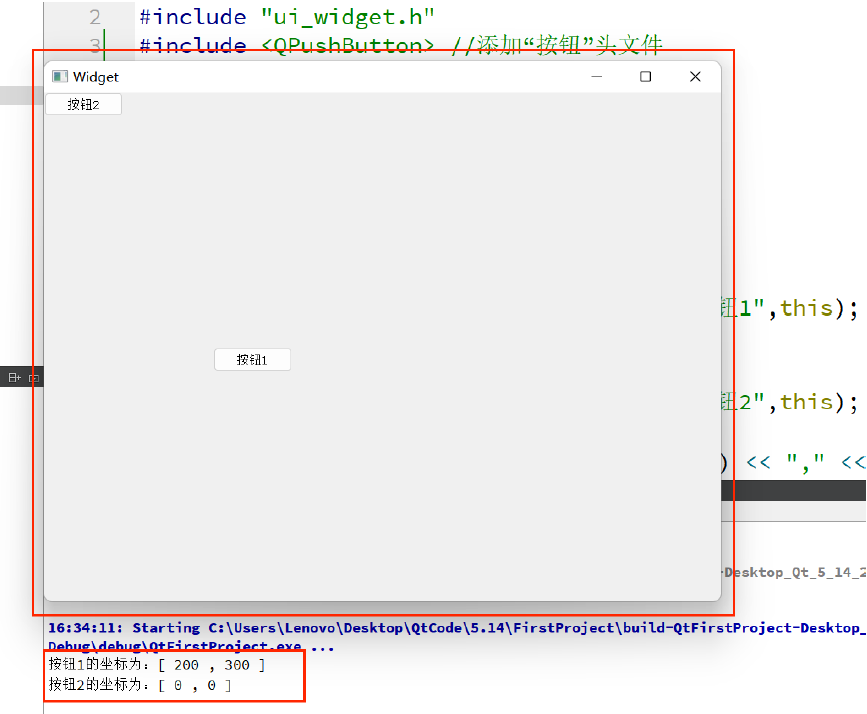
【从零开始学习QT】快捷键、帮助文档、Qt窗口坐标体系
目录 Qt Creator 中的快捷键 使用帮助文档 Qt 窗口坐标体系 QT专栏:QT_uyeonashi的博客-CSDN博客 Qt Creator 中的快捷键 • 注释:ctrl / • 运行:ctrl R • 编译:ctrl B • 字体缩放:ctrl 鼠标滑轮 • 查找&am…...
)
强化学习笔记总结(结合论文)
本篇博客参考来自大佬的开源书籍,结合自己的思考,写了这一篇总结,帮助大家学习了解强化学习的基础知识 文章目录 强化学习特点定义 强化学习应用实例强化学习和监督式学习、非监督式学习分类强化学习和监督式学习的区别:强化学习…...

Java线程安全解决方案全面指南
Java线程安全解决方案全面指南 引言 在多线程编程中,线程安全是保证程序正确性的关键要素。Java作为一门广泛用于并发编程的语言,提供了丰富的线程安全解决方案。本文将全面介绍Java中实现线程安全的各类方法,帮助开发者编写出更健壮的多线…...
)
superior哥深度学习系列(大纲)
🚀 superior哥深度学习系列学习大纲(2025版) 嘿!各位AI探索者们!👋 这是superior哥精心打造的深度学习学习路线图。从零基础小白到AI实战高手,这份大纲会陪你一路成长!记住ÿ…...

基于stm32的多旋翼无人机(Multi-rotor UAV based on stm32)
由于一直在调试本项目,好久没有发文章,最近本项目的PID调试初见成效!开始正文前首先感谢各位粉丝的支持,以及对本项目技术上支持的老师以及师兄,谢谢你们! 对应源码及文件:源码及文件下载 基于…...
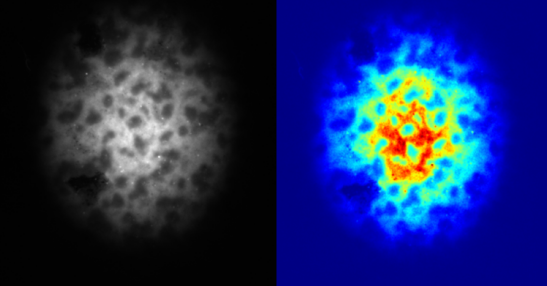
实验分享|基于sCMOS相机科学成像技术的耐高温航空涂层材料损伤检测实验
1实验背景 航空发动机外壳的耐高温涂层材料在长期高温、高压工况下易产生微小损伤与裂纹,可能导致严重安全隐患。传统光学检测手段受限于分辨率与灵敏度,难以捕捉微米级缺陷,且检测效率低下。 某高校航空材料实验室,采用科学相机…...
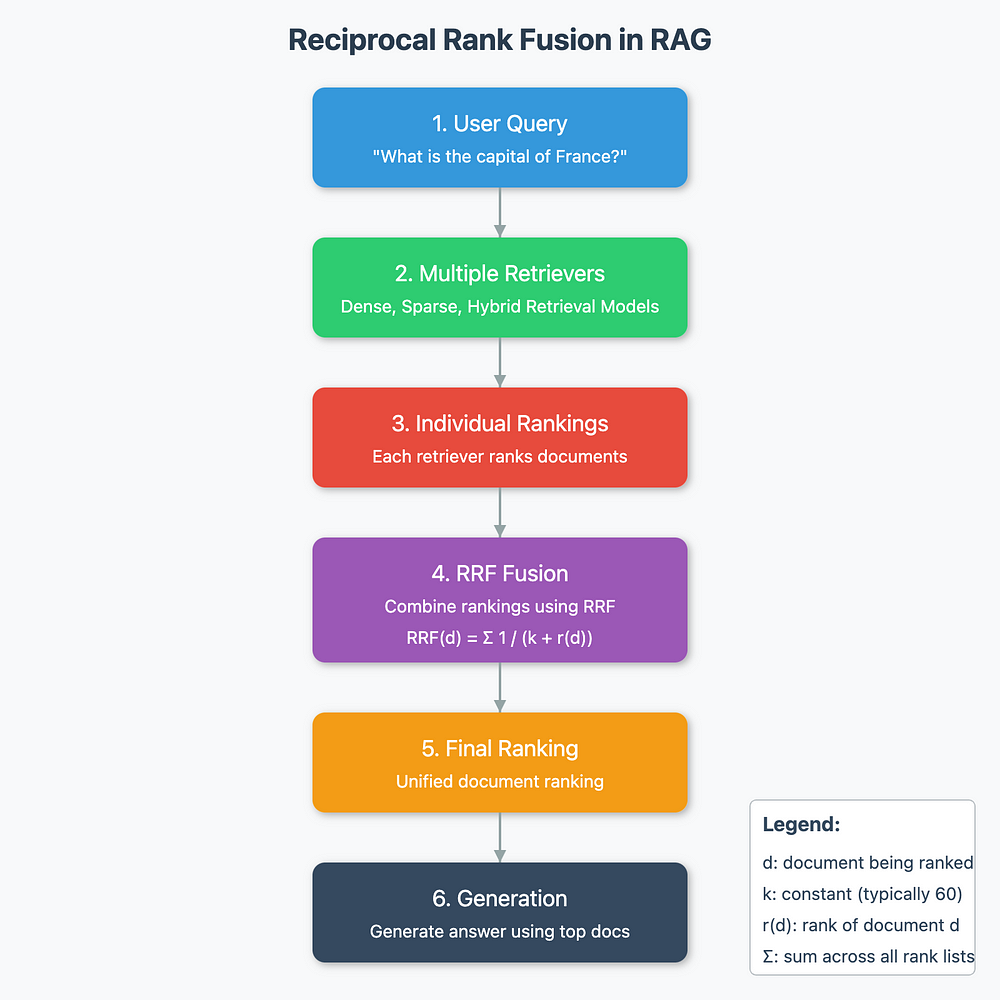
RAG混合检索:倒数秩融合RRF算法
文章目录 检索增强生成 (RAG)倒数秩融合在 RAG 中的工作原理RRF 背后的数学直觉检索增强生成 (RAG) RAG 是自然语言处理中的一种强大技术,结合了基于检索的模型和生成模型的优势。 如果检索器未能从检索器中获取相关文档,则精度较低,幻觉的可能性会增加。 有些查询适合…...

2011肠衣问题
1 D类竞赛题目---具体题目 D题 天然肠衣搭配问题 天然肠衣(以下简称肠衣)制作加工是我国的一个传统产业,出口量占世界首位。肠衣经过清洗整理后被分割成长度不等的小段(原料),进入组装工序。 传统的生产…...
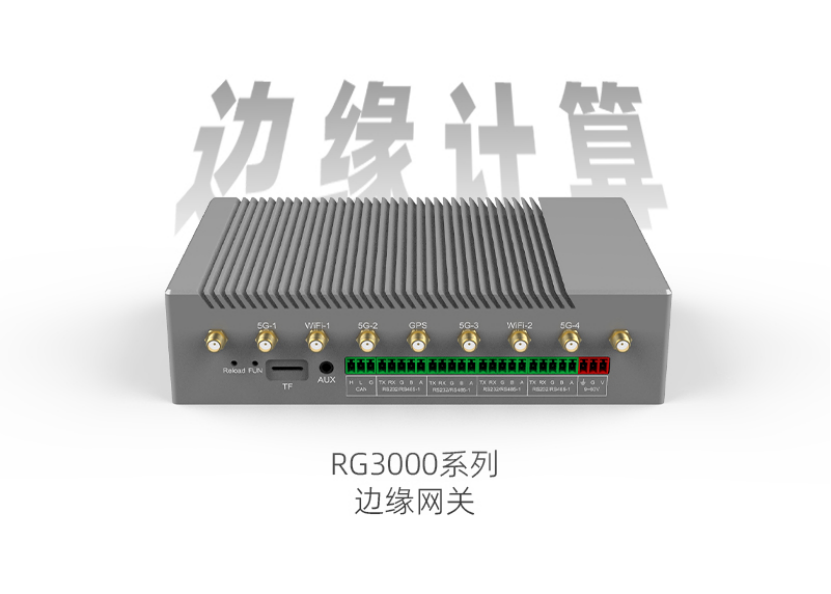
RG3000网关构建5G LAN智慧工厂智能制造
在工业4.0与智能制造的趋势下,传统制造业正前后往智慧工厂转型升级。在转型过程中,高效、稳定、灵活的网络通信是实现设备互联互通、数据实时交互与智能决策的基础。智联物联RG3000网关,凭借其融合5G通信技术、WiFi6无线传输、边缘计算能力与…...

Rust语言学习教程、案例与项目实战指引
Rust语言学习教程、案例与项目实战指引 一、入门教程 (一)官方核心文档 Rust官方网站的核心文档是踏上Rust学习征程的绝佳起点。这里犹如一座知识宝库,涵盖了Rust编程时可能遇到的几乎所有内容,从基础语法到高级特性,一…...

通信应用高速模数转换器ADC
在5G通信、医疗成像、航空航天及工业自动化等关键领域,高速ADC模数转换器作为信号链的“心脏”,其性能直接决定了系统的精度与效率。然而,如何精确测试高速ADC的动态参数、优化设计验证流程、应对复杂应用场景的挑战,始终是工程师…...

大模型测评选型指南:企业级大模型测评实战解析
在当今数字化飞速发展的时代,AIGC大模型如雨后春笋般涌现,为各行业带来创新变革的同时,其安全性也成为了不容忽视的关键问题。随着人工智能技术加速落地,AIGC大模型的安全合规已成为产业发展的核心命题。那么,企业该如…...

微信小程序学习目录
个人简介 👨💻个人主页: 魔术师 📖学习方向: 主攻前端方向,正逐渐往全栈发展 🚴个人状态: 研发工程师,现效力于政务服务网事业 🇨🇳人生格言&…...

AG32 DMAC实现内部MCU与FPGA通信【知识库】
一、简介 DMAC是独立于MCU和FPGA之外的外设,连接到AHB总线,可通过寄存器配置实现直接内存存取。通过AHB总线实现MCU与FPGA进行高性能通信。理论最高传输速率可达 bus_clock * 32 168MHz * 32 5376Mbps 5.25Gbps,超频到336MHz的形况下&…...
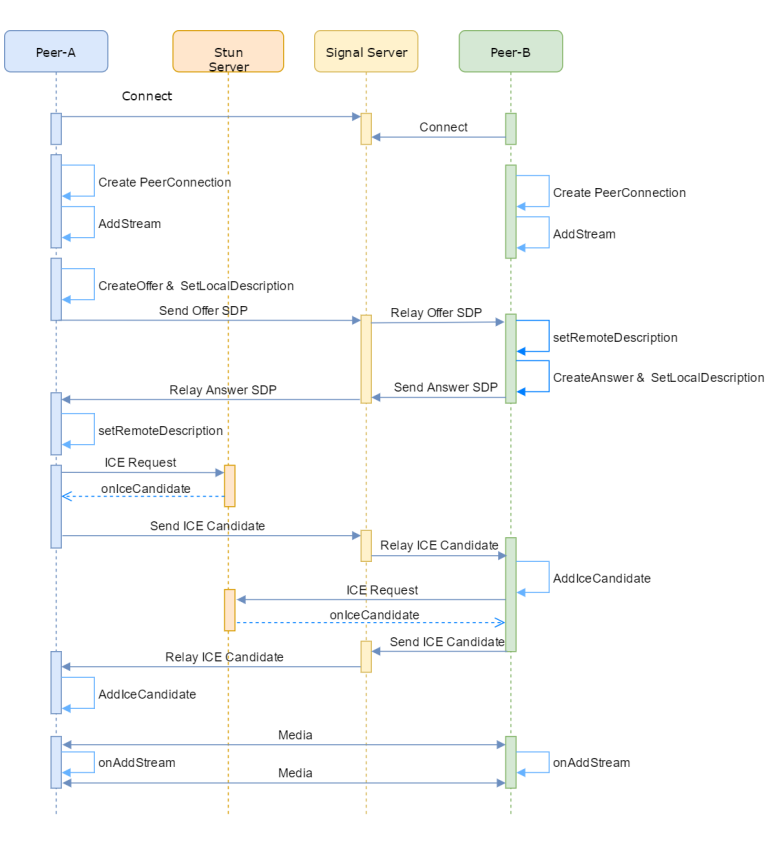
webrtc初了解
1. webrtc的简介 一、WebRTC 是什么? Web Real-Time Communication(网页实时通信),是浏览器原生支持的实时音视频通信技术,无需安装插件或客户端,可直接在浏览器之间实现点对点(P2P)…...
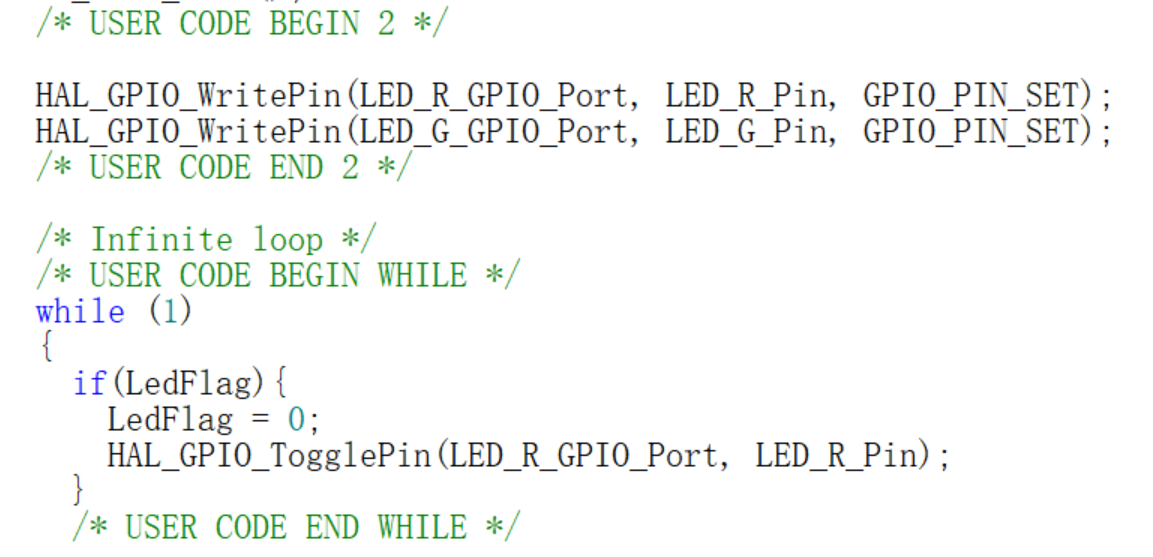
[STM32学习笔记(九)]CubeMX项目使用系统定时器SysTick的中断服务函数进行定时
有很多文章说明了由于HAL_Delay()函数的本质是系统定时器计数,通过全局变量uwTick的不断增加实现的比较延迟。调用HAL_Delay()函数会阻塞其他工作,因此在外设ISR进程调用该延迟时,要特别小心。 因此,现在考虑,既然系统…...

5G 核心网 NGAP UE-TNL 偶联和绑定
引言: 在 5G 核心网架构中,NG 接口作为连接无线接入网(RAN)与核心网(5GC)的关键纽带,承载着大量控制面信令交互。NG 应用协议(NGAP)作为 NG 接口上的核心协议,负责管理 RAN 与 5GC 之间的通信,其中 UE - TNL(User Equipment - Transport Network Layer)偶联和绑定…...