Opencv4 c++ 自用笔记 03 滑动条、相机与视频操作
1. 相机与视频操作
1.1 打开视频/相机
OpenCV 中 imread() 只能读取静态图像,若要读取视频文件或摄像头流,需要使用 VideoCapture 类:
// 构造函数
cv::VideoCapture::VideoCapture();
cv::VideoCapture::VideoCapture(const std::string& filename, int apiPreference = cv::CAP_ANY); // 打开视频文件,apiPreference为设置属性
cv::VideoCapture::VideoCapture(int index, int apiPreference = cv::CAP_ANY); // 打开摄像头,index 为设备 ID// 或者先默认构造,再调用 open()
VideoCapture cap;
cap.open("example.avi");
cap.open(0);
1.2 读取并播放视频
VideoCapture video("example.avi");
if (!video.isOpened()) {std::cerr << "Error: 无法打开视频文件!" << std::endl;return -1;
}double fps = video.get(cv::CAP_PROP_FPS); // 读取帧率
int delay = static_cast<int>(1000.0 / fps); // 每帧显示时长(毫秒)while (true) {cv::Mat frame;video >> frame; // 读取下一帧到 frameif (frame.empty()) break; // 视频结束或读取失败则退出cv::imshow("Video Playback", frame);if (cv::waitKey(delay) == 'q') break;
}
video.release();
cv::destroyAllWindows();
2. 视频属性查询
使用 VideoCapture::get(propId) 可以获取视频或摄像头流的各种参数:
| Property | 参数 ID |
|---|---|
| 当前播放位置(毫秒) | CAP_PROP_POS_MSEC (0) |
| 视频宽度 | CAP_PROP_FRAME_WIDTH (3) |
| 视频高度 | CAP_PROP_FRAME_HEIGHT (4) |
| 帧率 | CAP_PROP_FPS (5) |
| 编解码器 | CAP_PROP_FOURCC (6) |
| 总帧数 | CAP_PROP_FRAME_COUNT (7) |
| 返回图像格式 | CAP_PROP_FORMAT (8) |
| 摄像头专属属性 | |
| 亮度 | CAP_PROP_BRIGHTNESS (10) |
| 对比度 | CAP_PROP_CONTRAST (11) |
| 饱和度 | CAP_PROP_SATURATION (12) |
| 色调 | CAP_PROP_HUE (13) |
| 增益 | CAP_PROP_GAIN (14) |
示例:
double width = video.get(cv::CAP_PROP_FRAME_WIDTH);
double height = video.get(cv::CAP_PROP_FRAME_HEIGHT);
3. 视频写入与保存
3.1 VideoWriter 类
// 构造函数
cv::VideoWriter::VideoWriter();
cv::VideoWriter::VideoWriter(const std::string& filename,int fourcc, double fps, cv::Size frameSize, bool isColor = true);
filename:输出文件路径及名称(带后缀)
fourcc:编码格式,使用 VideoWriter::fourcc('M','J','P','G') 等,-1为自动采用合适的编解码器
fps:输出帧率
frameSize:视频分辨率(宽, 高)
isColor:是否彩色(true/false)
3.2 保存摄像头视频
#include <opencv2/opencv.hpp>
#include <iostream>using namespace std;
using namespace cv;int main() {VideoCapture cap(0);if (!cap.isOpened()) {cerr << "Error: 无法打开摄像头!" << endl;return -1;}// 读取第一帧以获取格式Mat frame;cap.read(frame);bool isColor = (frame.type() == CV_8UC3);// 配置 VideoWriterint codec = VideoWriter::fourcc('M','J','P','G');double fps = 30.0;Size size(640, 480);VideoWriter writer("output.avi", codec, fps, size, isColor);if (!writer.isOpened()) {cerr << "Error: 无法创建视频写入器!" << endl;return -1;}// 循环读取并写入while (1) {if (!cap.read(frame) || frame.empty()) {cerr << "Error: 无法读取帧或帧为空!" << endl;break;}writer.write(frame);imshow("Capture & Save", frame);if (waitKey(30) == 'q') {cout << "退出程序" << endl;break;}}cap.release();writer.release();destroyAllWindows();return 0;
}
4. 窗口交互与滑动条
4.1 创建滑动条
createTrackbar(trackbarName, windowName, &value, maxCount, callback, userdata=0);
trackbarName:滑动条名称
windowName:所属窗口名称
value:滑动条的当前值(整型指针)
maxCount:滑动条最大值
callback:回调函数,每次滑动时调用
userdata:用户自定义数据指针(可选)
4.2 示例:图像阈值调整
#include <opencv2/opencv.hpp>
#include <iostream>using namespace std;
using namespace cv;int maxValue = 127;
Mat gray, binary;void callback(int, void*) {adaptiveThreshold(gray, binary, maxValue,ADAPTIVE_THRESH_MEAN_C,THRESH_BINARY, 11, 2);imshow("Thresh", binary);
}int main() {string inputPath = "/home/user/test.jpg";string outputPath = "/home/user/outputs.jpg";gray = imread(inputPath, IMREAD_GRAYSCALE);if (gray.empty()) {cerr << "Error: 无法读取输入图像!" << endl;return -1;}namedWindow("Thresh");createTrackbar("MaxValue", "Thresh", &maxValue, 255, onTrackbar);// 初始显示onTrackbar(0, nullptr);while (true) {char key = (char)waitKey(10);if (key == 'q') {imwrite(outputPath, binary);cout << "结果已保存到: " << outputPath << endl;break;}}destroyAllWindows();return 0;
}
回调函数签名:void callback(int pos, void* userdata);
每次滑动时,pos 为当前滑动位置,可用全局变量或 getTrackbarPos() 获取最新值。
5. 相机图像处理示例
上述代码中实现了利用滑动条调整二值化图像中的阈值,核心在于callback函数对图像的更新。
#include <opencv2/opencv.hpp>
#include <iostream>using namespace std;
using namespace cv;int maxValue = 127;
Mat gray, binary;void callback(int, void*) {adaptiveThreshold(gray, binary, maxValue,ADAPTIVE_THRESH_MEAN_C,THRESH_BINARY, 11, 2);imshow("Binary", binary);
}int main() {VideoCapture cap(0);if (!cap.isOpened()) {cerr << "Error: 无法打开摄像头!" << endl;return -1;}namedWindow("Binary");createTrackbar("Threshold", "Binary", &maxValue, 255, onTrackbar);while (1) {Mat frame;cap >> frame;if (frame.empty()) {cerr << "Error: 捕获帧为空!" << endl;break;}// 转灰度并二值化cvtColor(frame, gray, COLOR_BGR2GRAY);onTrackbar(0, nullptr); // 初始更新一次imshow("Binary", binary);if (waitKey(30) == 'q') {destroyWindow("Binary");break;}}cap.release();return 0;
}
相关文章:

Opencv4 c++ 自用笔记 03 滑动条、相机与视频操作
1. 相机与视频操作 1.1 打开视频/相机 OpenCV 中 imread() 只能读取静态图像,若要读取视频文件或摄像头流,需要使用 VideoCapture 类: // 构造函数 cv::VideoCapture::VideoCapture(); cv::VideoCapture…...
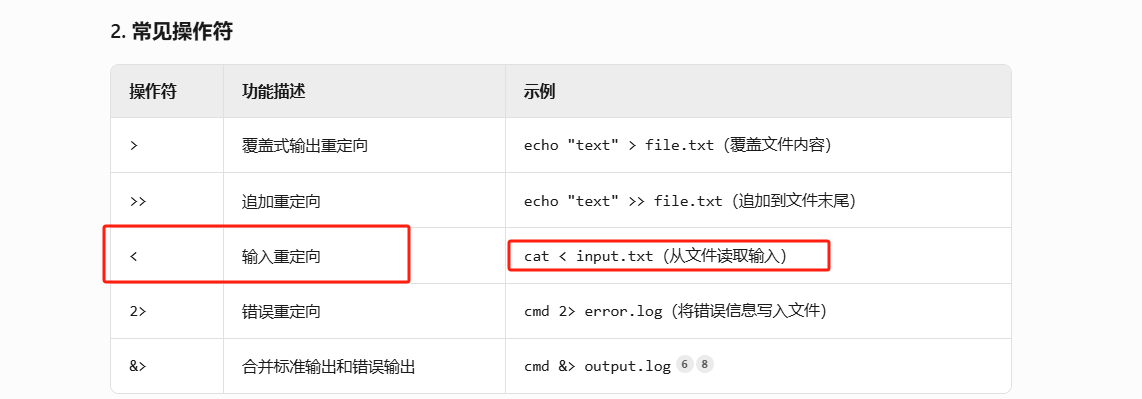
LINUX528 重定向
2>&1 我的理解: 2>&1,2stderr错误输出,1stdout输出,stderr一般和stdout是分别输出(管道符只传递stdout,据元宝,stderr默认输出到终端;如果重定向符不进行2显示重定向&…...

研华工控机安装Windows10系统,适用UEFI(GPT)格式安装
主要硬件 主板:AIMB-787 、CPU:i5-6500 U盘启动工具:通过网盘分享的文件:rufus-3.20.zip 链接: https://pan.baidu.com/s/1YlFfd-_EhFHCG4sEHBQ8dQ?pwdQT12 提取码: QT12 Win10 22H2 Pro 纯净版系统:通过网盘分享…...
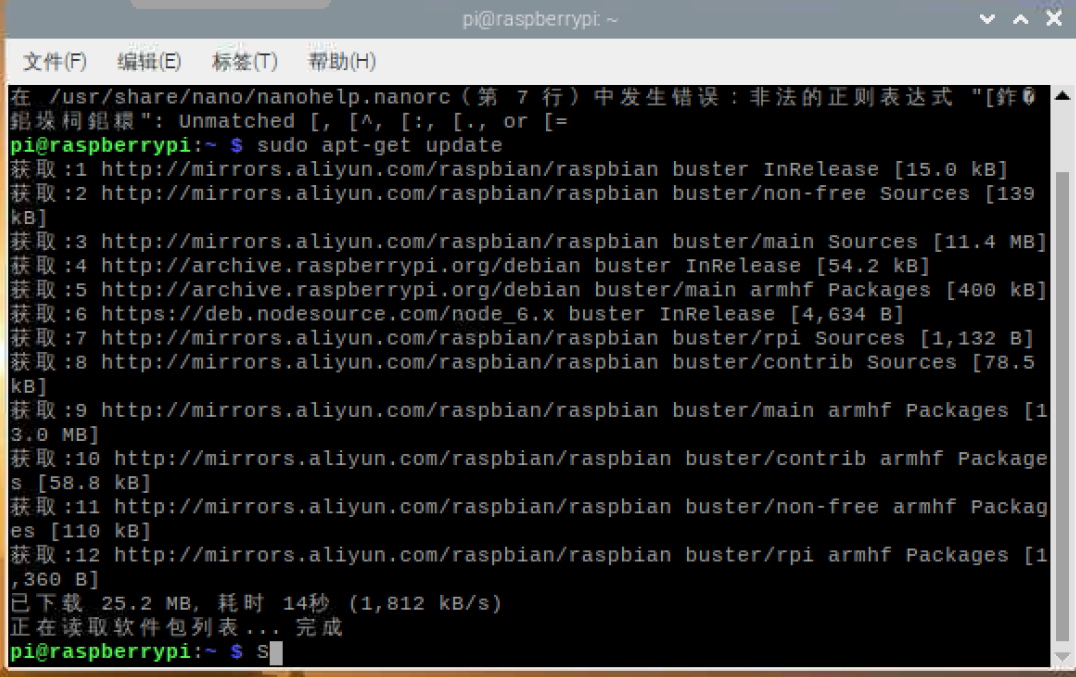
1、树莓派更换软件下载源
树莓派官方系统raspbian自带的是国外的软件源,在国内使用经常会遇到无法下载软件的问题。 以下是把raspbian系统(buster版本)的下载源改为阿里云软件源的方法。 1、修改sources.list文件 sudo nano /etc/apt/sources.list 将初始化中的代…...

历年中山大学计算机保研上机真题
历年中山大学计算机保研上机真题 2025中山大学计算机保研上机真题 2024中山大学计算机保研上机真题 2023中山大学计算机保研上机真题 在线测评链接:https://pgcode.cn/school 不连续1的子串 题目描述 给定一个数字 n n n,输出长度为 n n n 的 01…...
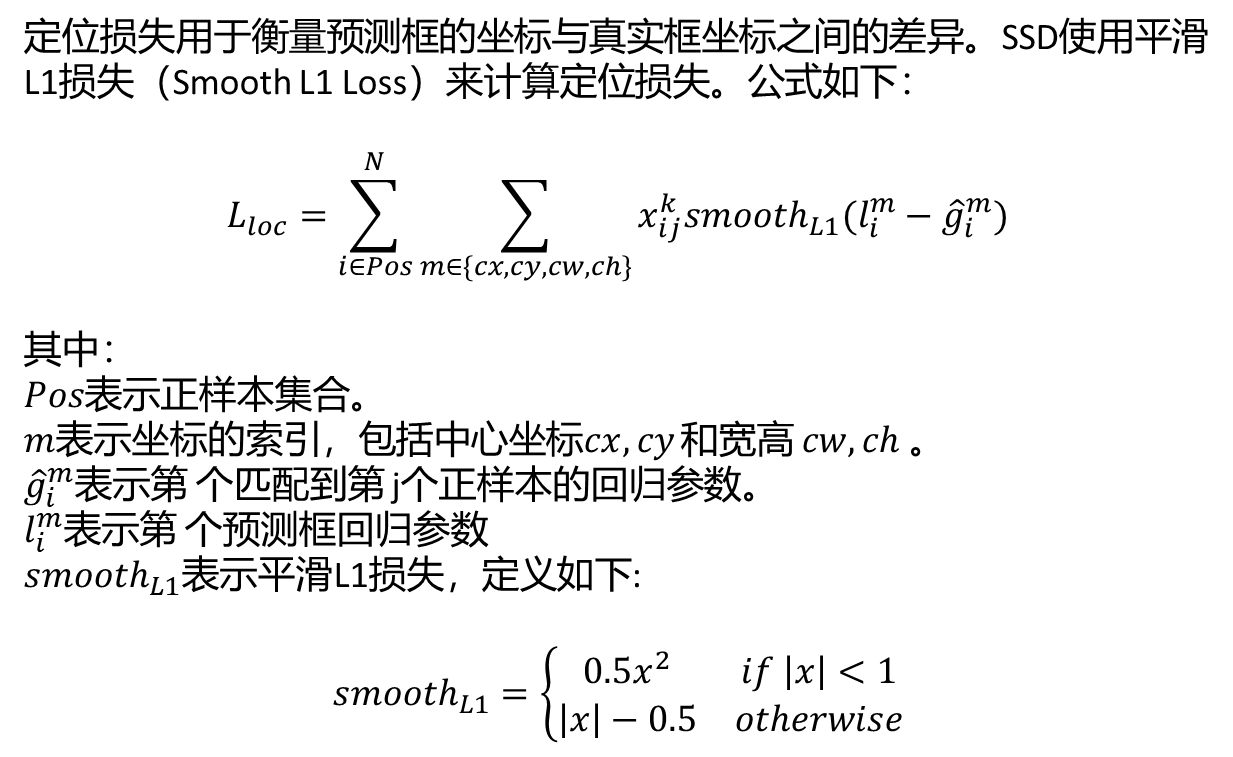
Python----目标检测(《SSD: Single Shot MultiBox Detector》论文和SSD的原理与网络结构)
一、SSD:单次多框检测器 1.1、基本信息 标题:SSD: Single Shot MultiBox Detector 作者:Wei Liu (UNC Chapel Hill), Dragomir Anguelov (Zoox Inc.), Dumitru Erhan, Christian Szegedy (Google Inc.), Scott Reed (University of Michiga…...
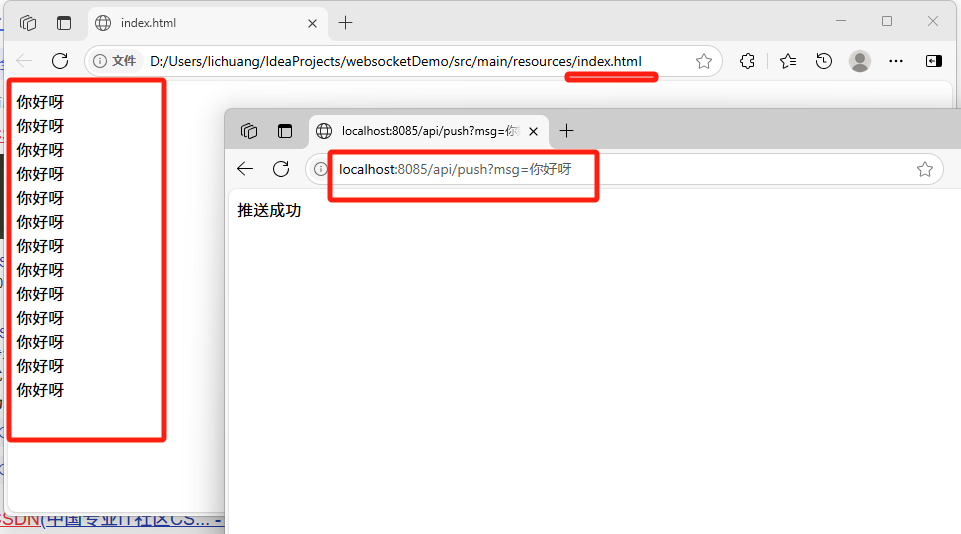
springboot集成websocket给前端推送消息
一般通常情况下,我们都是前端主动朝后端发送请求,那么有没有可能,后端主动给前端推送消息呢?这时候就可以借助websocket来实现。下面给出一个简单的实现样例。 首先创建一个websocketDemo工程,该工程的整体结构如下&a…...

DrissionPage SessionPage模式:轻量级HTTP请求的利器
引言 在Python自动化领域,DrissionPage以其创新的三模式设计脱颖而出。作为专为HTTP请求优化的SessionPage模式,凭借其轻量级架构和高效性能,成为API调用、数据采集等场景的首选方案。本文将深入解析SessionPage的技术特性、核心优势及典型应…...
0527漏洞原理:XSS笔记
理论知识 01 前端基础知识 1.1 HTML基础 定义:HTML(超文本标记语言)用于描述网页结构。标准结构: 内嵌脚本: <script>JavaScript代码</script>1.4 JavaScript弹窗函数 函数描述alert("文本&quo…...

智能制造之精读——RPA制造行业常见场景【附全文阅读】
RPA 在制造行业应用广泛,为企业带来显著价值,是极具潜力的智能化解决方案。它能节省成本,降低人力与管理成本;提升运营效率,减少人机交互损耗;提高质量,保障流程准确性;还能增强合规…...

spark shuffle的分区支持动态调整,而hive不支持
根据Spark官方文档,Spark Shuffle分区支持动态调整的核心原因在于其架构设计和执行模型的先进性: 1. 自适应查询执行(AQE)机制 Spark 3.0引入的AQE特性允许在运行时动态优化执行计划,包括Shuffle分区调整:…...

网络安全十大漏洞
1️⃣ 失效的访问控制(Broken Access Control) 核心问题:用户能访问本应被禁止的资源或操作 攻击案例: 修改URL参数:https://shop.com/order?user_id100 → 改为 user_id101 查看他人订单 直接访问管理员页面&#…...
)
关于uv 工具的使用总结(uv,conda,pip什么关系)
最近要开发MCP 项目,uv工具使用是官方推荐的方式,逐要了解这个uv工具。整体理解如下: 一.uv工具的基本情况 UV 是一个由 Rust 编写的现代化 Python 包管理工具,旨在通过极速性能和一体化功能替代传统工具(如 pip、vi…...

深入剖析 Docker 容器化原理与实战应用,开启技术新征程!
文章目录 前言一、为什么 是Docker ?二、Docker 容器化原理分析2.1 镜像(Image)2.2 容器(Container)2.3 仓库(Registry) 三、Docker 容器化实践3.1 Docker安装3.2 创建一个 Docker 镜像3.3 运行…...

Xamarin劝退之踩坑笔记
初级代码游戏的专栏介绍与文章目录-CSDN博客 我的github:codetoys,所有代码都将会位于ctfc库中。已经放入库中我会指出在库中的位置。 这些代码大部分以Linux为目标但部分代码是纯C的,可以在任何平台上使用。 源码指引:github源…...

计算机网络(4)——网络层
1.概述 1.1 网络层服务 (1) 网络层为不同主机(Host)之间提供了一种逻辑通信机制 (2)每个主机和路由器都运行网络层协议 发送方:将来自传输层的消息封装到数据报(datagram)中接收方:向传输层交付数据段(segment) 1.2 网络层核心功能 路由选择(routing…...

java 多线程中的volatile关键字作用
文章目录 前置作用一:多线程下,保证可见性作用二:多线程下,禁止指令重排序 前置 保证可见性和保证没有指令重排导致的问题 但是不保证原子性 volatile 常常见到和 static 一起使用,因为 volatile 用在多线程中共享变…...
ESP32基础知识1:项目工程建立和烧录
ESP32基础知识1:项目工程建立和烧录 一、本文内容与前置知识点1. 本文内容2. 前置知识点 二、新建工程1. 工程配置2. 依照模板建立项目 三、硬件烧录1. 硬件准备2. 烧录器和ESP32连接3. 电脑端设置4. 烧录成功演示 四、参考文献 一、本文内容与前置知识点 1. 本文内…...
allWebPlugin中间件VLC专用版之录像功能介绍
背景 VLC控件原有接口是不支持录像的,且libVLC提供的接口库,不能获取录像文件完整名称(VLC-3.0.11 录制直播时有的无法保存视频的解决方法 - 1CM - 博客园);因此,非常的不友好。为了能够彻底解决这个问题&a…...
Vim 支持多种编程语言编辑器
软件简介 Vim是Vi编辑器的增强版,它提供了更多的功能和快捷键。Vim是一款自由软件,它是由Bram Moolenaar在1991年创建的。Vim支持多种编程语言,包括C、C、Java、Python、Perl等等。它是一款轻量级的编辑器,可以快速打开和编辑大型…...
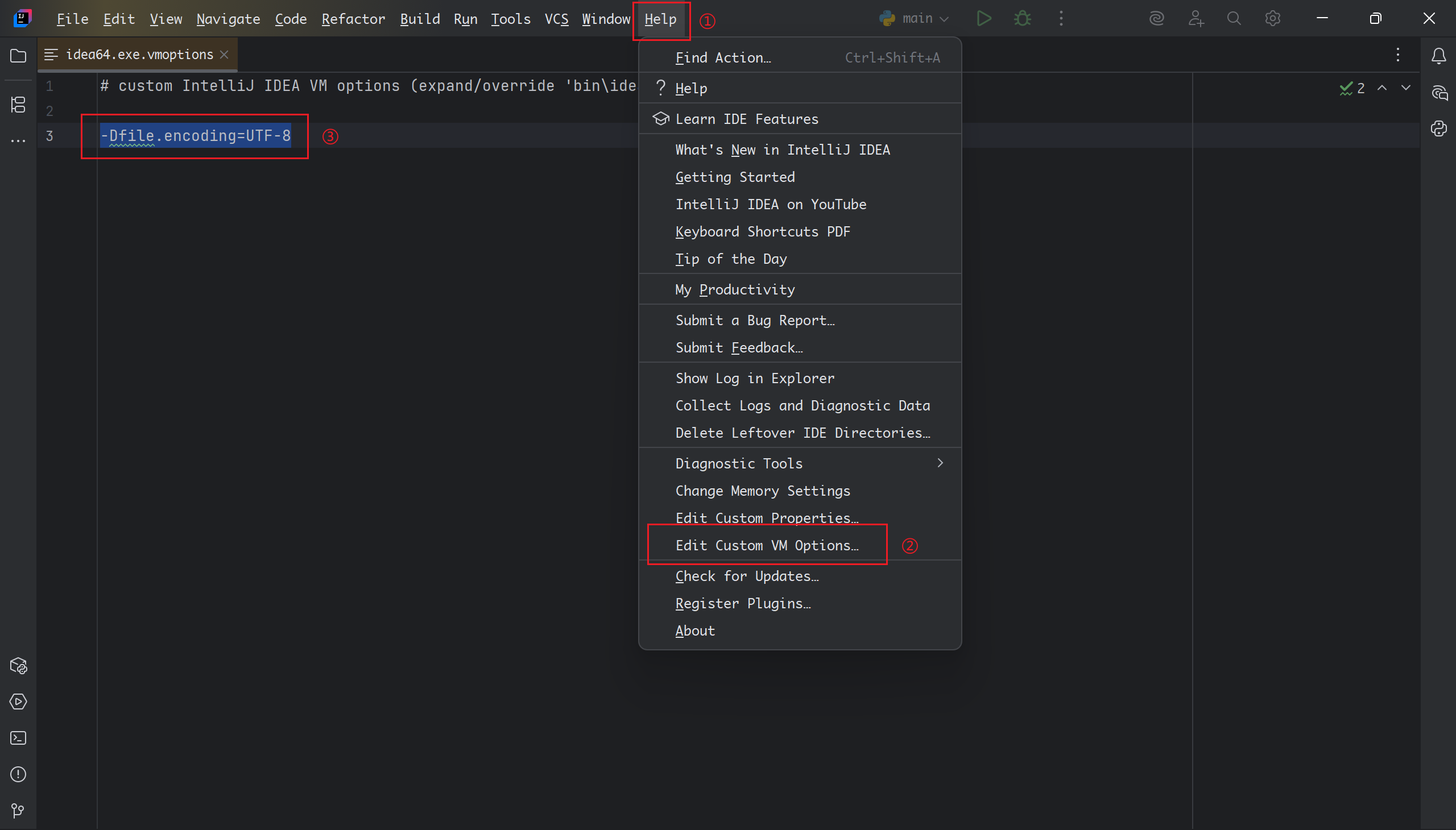
解决 IDEA 在运行时中文乱码问题
直接说解决办法 编译 IDEA 所在目录的启动的 .vmoptions 文件,添加以下JVM 参数即可 -Dfile.encodingUTF-8如下图所示,Help > Edit Custom VM Options,随后在编辑框中添加-Dfile.encodingUTF-8 的 JVM 参数...
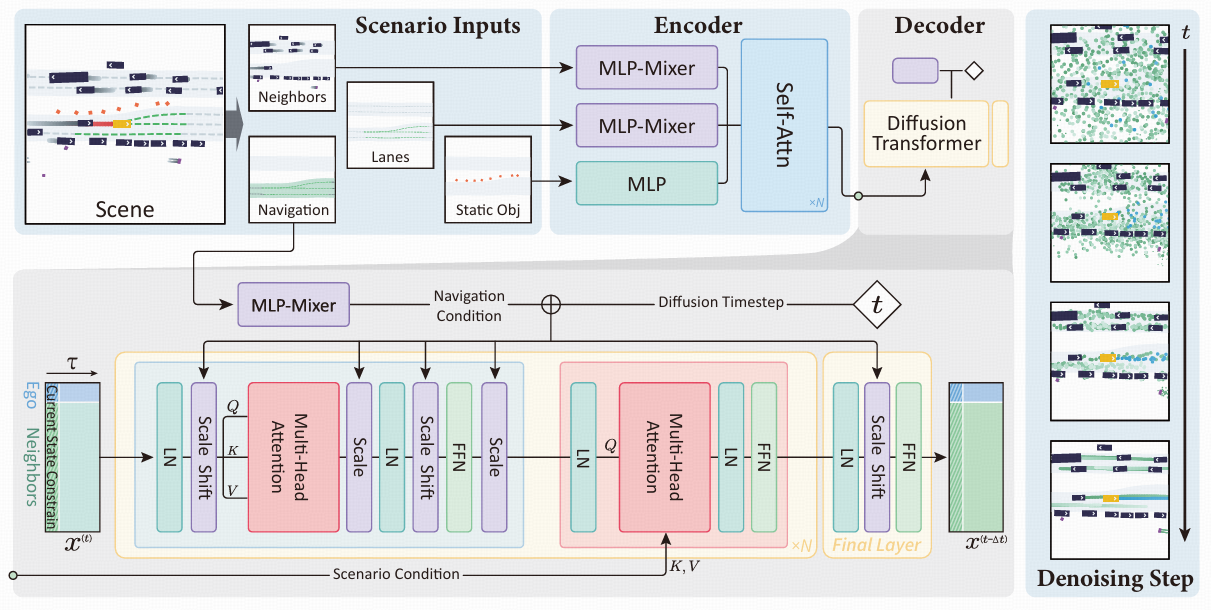
Diffusion Planner:扩散模型重塑自动驾驶路径规划(ICLR‘25)
1. 概述 2025年2月14日,清华大学AIR智能产业研究院联合毫末智行、中科院自动化所和香港中文大学团队,在ICLR 2025会议上发布了Diffusion Planner——一种创新性的基于Diffusion Transformer的自动驾驶规划模型架构。该系统联合建模周车运动预测与自车行…...

华为OD机试真题——阿里巴巴找黄金宝箱 IV(2025A卷:200分)Java/python/JavaScript/C++/C语言/GO六种最佳实现
2025 A卷 200分 题型 本文涵盖详细的问题分析、解题思路、代码实现、代码详解、测试用例以及综合分析; 并提供Java、python、JavaScript、C++、C语言、GO六种语言的最佳实现方式! 2025华为OD真题目录+全流程解析/备考攻略/经验分享 华为OD机试真题《阿里巴巴找黄金宝箱 IV》:…...
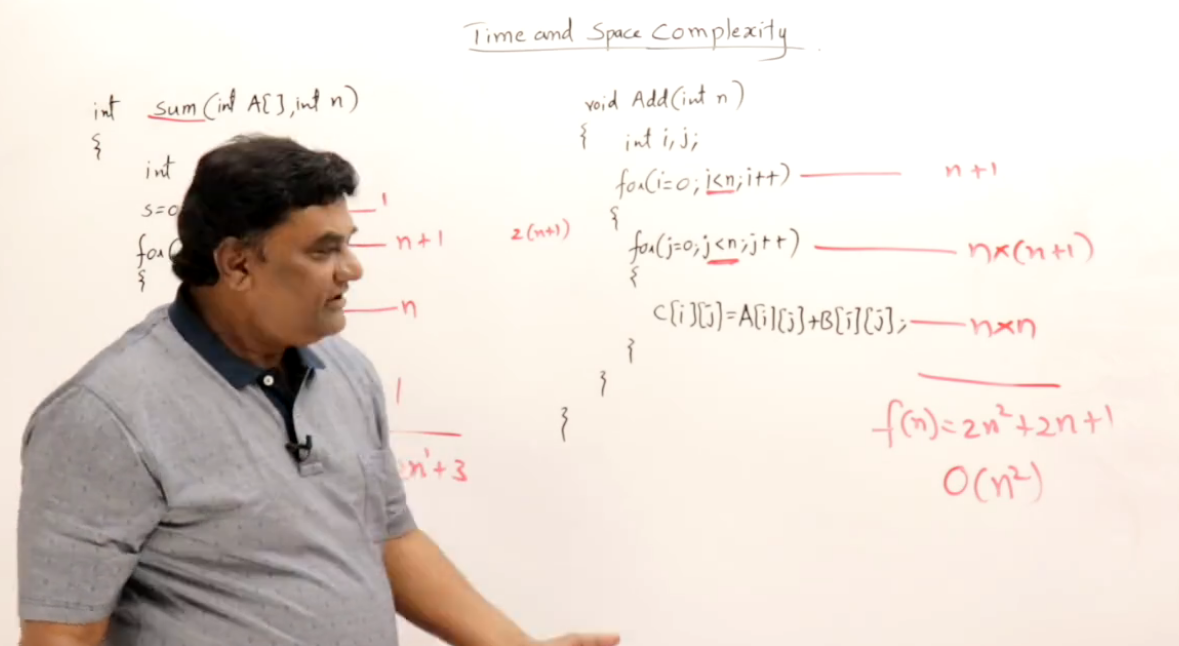
数据结构:时间复杂度(Time Complexity)和空间复杂度(Space Complexity)
目录 什么是时间复杂度? 如何表示时间复杂度? 为什么需要时间复杂度? 用几个例子理解 怎么分析代码的时间复杂度? 什么是空间复杂度? 举例理解 什么是时间复杂度? 时间复杂度是用来衡量一个算法“…...

CentOS7.9环境离线部署docker和docker-compose的两种方式
目 录 一、yum安装,使用rpm安装包和相关依赖 1.1 准备rpm安装包 1.2 将docker-23.0.4.tar.gz上传至/opt目录下 二、二进制文件方式安装 三、安装docker-compose 一、yum安装,使用rpm安装包和相关依赖 1.1 准备rpm安装包 1)在一台与…...

北京大学肖臻老师《区块链技术与应用》公开课:06-BTC-网络
文章目录 比特币工作在应用层,它的底层是一个P2P overlay Network...

SSL/TLS 协议详解:安全通信的基石
一、概述 SSL(Secure Sockets Layer) 及其继任者 TLS(Transport Layer Security) 是位于 传输层(TCP)与应用层之间 的加密协议,用于在网络通信中实现 机密性、身份认证和数据完整性。 核心目标…...
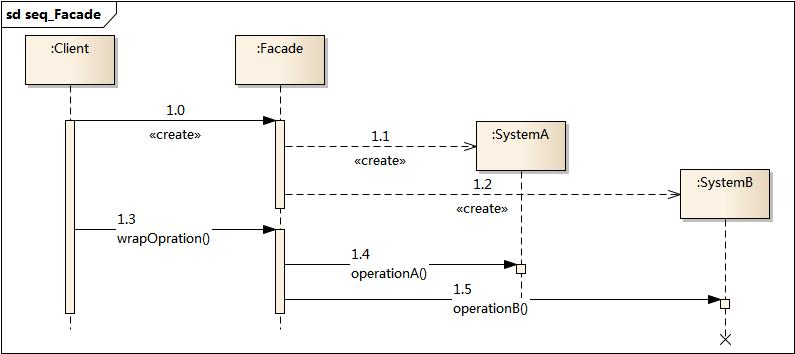
设计模式——外观设计模式(结构型)
摘要 本文介绍了外观设计模式,它是一种结构型设计模式,通过引入一个外观类来封装复杂子系统的调用细节,对外提供简单统一的接口。文中通过生活类比、关键角色介绍、使用场景分析以及结构说明等方面对这一模式进行了全面阐述,还涉…...

Linux `vi/vim` 编辑器深度解析与高阶应用指南
Linux `vi/vim` 编辑器深度解析与高阶应用指南 一、核心功能解析1. 模式系统2. 与主流编辑器对比二、核心操作体系1. 高效导航命令2. 文本操作矩阵三、高阶配置体系1. .vimrc 配置示例2. 插件管理系统四、企业级开发实践1. 代码编辑技巧2. 宏录制与批量处理五、可视化与多窗口1…...
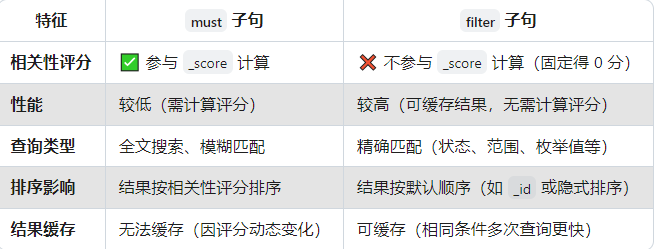
ES中must与filter的区别
在 Elasticsearch 的布尔查询(bool query)中,must 和 filter 是两个核心子句,它们的核心区别在于 是否影响相关性评分,这直接决定了它们在查询性能、使用场景和结果排序上的差异。以下是详细对比: 一、核心…...