YOLOv8 实战指南:如何实现视频区域内的目标统计与计数
文章目录
- YOLOv8改进 | 进阶实战篇:利用YOLOv8进行视频划定区域目标统计计数
- 1. 引言
- 2. YOLOv8基础回顾
- 2.1 YOLOv8架构概述
- 2.2 YOLOv8的安装与基本使用
- 3. 视频划定区域目标统计的实现
- 3.1 核心思路
- 3.2 完整实现代码
- 4. 代码深度解析
- 4.1 关键组件分析
- 4.2 性能优化技巧
- 5. 实际应用扩展
- 5.1 多区域计数
- 5.2 方向判断与流量统计
- 6. 总结与展望
YOLOv8改进 | 进阶实战篇:利用YOLOv8进行视频划定区域目标统计计数
1. 引言
在计算机视觉领域,实时目标检测一直是研究的热点。YOLO(You Only Look Once)系列作为其中的佼佼者,以其速度和精度的平衡著称。YOLOv8作为最新版本,在性能和易用性上都有了显著提升。本文将深入探讨如何利用YOLOv8实现视频中划定区域的目标统计计数,这是一个在实际应用中非常有价值的场景,如交通流量统计、商场人流量监测等。
2. YOLOv8基础回顾
2.1 YOLOv8架构概述
YOLOv8采用了一种新的骨干网络和neck设计,相比前代在精度和速度上都有提升。其主要特点包括:
- 更高效的CSP结构
- 改进的PANet neck
- Anchor-free检测头
- 更优的损失函数设计
2.2 YOLOv8的安装与基本使用
# 安装Ultralytics包
pip install ultralytics# 基本检测示例
from ultralytics import YOLO# 加载预训练模型
model = YOLO('yolov8n.pt') # 使用nano版本# 进行检测
results = model('image.jpg')
results[0].show()
3. 视频划定区域目标统计的实现
3.1 核心思路
实现视频划定区域目标统计需要以下几个关键步骤:
- 视频帧读取与处理
- 使用YOLOv8进行目标检测
- 定义感兴趣区域(ROI)
- 目标与ROI的位置关系判断
- 计数逻辑实现
- 结果可视化
3.2 完整实现代码
import cv2
import numpy as np
from ultralytics import YOLO
from collections import defaultdictclass VideoROICounter:def __init__(self, model_path='yolov8n.pt', classes=None):self.model = YOLO(model_path)self.classes = classes # 指定要统计的类别self.roi = None # 感兴趣区域self.counts = defaultdict(int) # 计数结果self.track_history = defaultdict(list) # 跟踪历史def set_roi(self, points):"""设置多边形ROI区域"""self.roi = np.array(points, np.int32)self.roi = self.roi.reshape((-1, 1, 2))def is_inside_roi(self, x, y):"""判断点是否在ROI内"""if self.roi is None:return Truereturn cv2.pointPolygonTest(self.roi, (x, y), False) >= 0def process_frame(self, frame):"""处理单帧图像"""# 执行检测results = self.model.track(frame, persist=True, classes=self.classes)# 获取检测结果boxes = results[0].boxes.xywh.cpu()track_ids = results[0].boxes.id.int().cpu().tolist() if results[0].boxes.id is not None else []clss = results[0].boxes.cls.cpu().tolist()# 绘制ROI区域if self.roi is not None:cv2.polylines(frame, [self.roi], True, (0, 255, 0), 2)# 处理每个检测结果for box, track_id, cls_id in zip(boxes, track_ids, clss):x, y, w, h = boxcenter = (int(x), int(y))# 检查是否在ROI内if self.is_inside_roi(center[0], center[1]):# 更新跟踪历史track = self.track_history[track_id]track.append(center)if len(track) > 30: # 保留最近的30个点track.pop(0)# 绘制轨迹points = np.array(track, dtype=np.int32).reshape((-1, 1, 2))cv2.polylines(frame, [points], False, (0, 255, 255), 2)# 绘制边界框cv2.rectangle(frame, (int(x - w/2), int(y - h/2)),(int(x + w/2), int(y + h/2)),(0, 255, 0), 2)# 更新计数if len(track) == 1: # 新进入的目标class_name = self.model.names[int(cls_id)]self.counts[class_name] += 1# 显示计数结果for i, (class_name, count) in enumerate(self.counts.items()):cv2.putText(frame, f"{class_name}: {count}", (10, 30 + i * 30),cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2)return framedef process_video(self, video_path, output_path=None):"""处理整个视频"""cap = cv2.VideoCapture(video_path)if output_path:width = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))height = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))fps = cap.get(cv2.CAP_PROP_FPS)fourcc = cv2.VideoWriter_fourcc(*'mp4v')out = cv2.VideoWriter(output_path, fourcc, fps, (width, height))while cap.isOpened():ret, frame = cap.read()if not ret:breakprocessed_frame = self.process_frame(frame)if output_path:out.write(processed_frame)cv2.imshow('ROI Counter', processed_frame)if cv2.waitKey(1) & 0xFF == ord('q'):breakcap.release()if output_path:out.release()cv2.destroyAllWindows()# 使用示例
if __name__ == "__main__":# 创建计数器实例counter = VideoROICounter(model_path='yolov8n.pt', classes=[0]) # 只统计人# 设置ROI区域 (四个点坐标)roi_points = [(300, 200), (800, 200), (900, 600), (200, 600)]counter.set_roi(roi_points)# 处理视频counter.process_video('people_walking.mp4', 'output.mp4')
4. 代码深度解析
4.1 关键组件分析
- ROI定义与判断:使用OpenCV的
pointPolygonTest函数判断目标中心点是否在多边形区域内 - 目标跟踪:利用YOLOv8内置的跟踪功能,通过
model.track()实现 - 计数逻辑:当新目标首次出现在ROI内时进行计数
- 可视化:绘制ROI边界、目标轨迹和计数结果
4.2 性能优化技巧
- ROI预处理:将ROI转换为numpy数组并reshape,提高处理效率
- 轨迹长度限制:只保留最近的30个轨迹点,避免内存过度消耗
- 类别过滤:通过
classes参数只检测感兴趣的类别
5. 实际应用扩展
5.1 多区域计数
可以扩展代码实现多个ROI区域的独立计数:
class MultiROICounter(VideoROICounter):def __init__(self, *args, **kwargs):super().__init__(*args, **kwargs)self.rois = [] # 多个ROI区域self.roi_counts = [] # 每个ROI的计数def add_roi(self, points, roi_id):"""添加一个ROI区域"""roi = np.array(points, np.int32).reshape((-1, 1, 2))self.rois.append((roi_id, roi))self.roi_counts.append(defaultdict(int))def process_frame(self, frame):results = self.model.track(frame, persist=True, classes=self.classes)boxes = results[0].boxes.xywh.cpu()track_ids = results[0].boxes.id.int().cpu().tolist() if results[0].boxes.id is not None else []clss = results[0].boxes.cls.cpu().tolist()# 绘制所有ROIfor roi_id, roi in self.rois:cv2.polylines(frame, [roi], True, (0, 255, 0), 2)cv2.putText(frame, f"ROI {roi_id}", tuple(roi[0][0]),cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)for box, track_id, cls_id in zip(boxes, track_ids, clss):x, y, w, h = boxcenter = (int(x), int(y))# 检查每个ROIfor i, (roi_id, roi) in enumerate(self.rois):if cv2.pointPolygonTest(roi, center, False) >= 0:# 更新该ROI的计数class_name = self.model.names[int(cls_id)]if track_id not in self.track_history:self.roi_counts[i][class_name] += 1# 绘制特定ROI的颜色cv2.rectangle(frame, (int(x - w/2), int(y - h/2)),(int(x + w/2), int(y + h/2)),(0, 0, 255), 2)break# 显示每个ROI的计数for i, (roi_id, _) in enumerate(self.rois):for j, (class_name, count) in enumerate(self.roi_counts[i].items()):cv2.putText(frame, f"ROI{roi_id} {class_name}: {count}", (10, 30 + i * 60 + j * 30),cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2)return frame
5.2 方向判断与流量统计
通过分析目标轨迹,可以判断其移动方向并实现进出流量统计:
def process_frame_with_direction(self, frame):# ... (前面的检测代码相同)for box, track_id, cls_id in zip(boxes, track_ids, clss):x, y, w, h = boxcenter = (int(x), int(y))track = self.track_history[track_id]track.append(center)if len(track) > 30:track.pop(0)# 计算移动方向if len(track) > 1:prev_point = track[-2]curr_point = track[-1]dx = curr_point[0] - prev_point[0]dy = curr_point[1] - prev_point[1]# 判断进出方向if self.is_inside_roi(curr_point[0], curr_point[1]):if not self.is_inside_roi(prev_point[0], prev_point[1]):# 进入ROIclass_name = self.model.names[int(cls_id)]self.entry_counts[class_name] += 1else:if self.is_inside_roi(prev_point[0], prev_point[1]):# 离开ROIclass_name = self.model.names[int(cls_id)]self.exit_counts[class_name] += 1# ... (剩余的可视化代码)
6. 总结与展望
本文详细介绍了如何利用YOLOv8实现视频中划定区域的目标统计计数。通过结合目标检测、跟踪和几何计算,我们构建了一个实用的视频分析工具。这种技术可以广泛应用于各种场景:
- 交通管理:统计交叉路口的车流量
- 零售分析:统计商店入口的顾客数量
- 安全监控:检测禁区内的入侵者
- 城市管理:统计公共场所的人流密度
未来可以进一步改进的方向包括:
- 集成更复杂的行为分析
- 添加深度学习分类器对目标进行更细粒度的分类
- 优化算法以适应更高分辨率的视频流
- 开发基于Web的交互式界面,让用户可以动态调整ROI区域
YOLOv8的强大性能为这些应用提供了坚实的基础,开发者可以根据具体需求灵活扩展本文介绍的方法。

相关文章:
YOLOv8 实战指南:如何实现视频区域内的目标统计与计数
文章目录 YOLOv8改进 | 进阶实战篇:利用YOLOv8进行视频划定区域目标统计计数1. 引言2. YOLOv8基础回顾2.1 YOLOv8架构概述2.2 YOLOv8的安装与基本使用 3. 视频划定区域目标统计的实现3.1 核心思路3.2 完整实现代码 4. 代码深度解析4.1 关键组件分析4.2 性能优化技巧…...

matlab实现VMD去噪、SVD去噪,源代码详解
为了更好的利用MATLAB自带的vmd、svd函数,本期作者将详细讲解一下MATLAB自带的这两个分解函数如何使用,以及如何画漂亮的模态分解图。 VMD函数用法详解 首先给出官方vmd函数的调用格式。 [imf,residual,info] vmd(x) 函数的输入: 这里的x是待…...
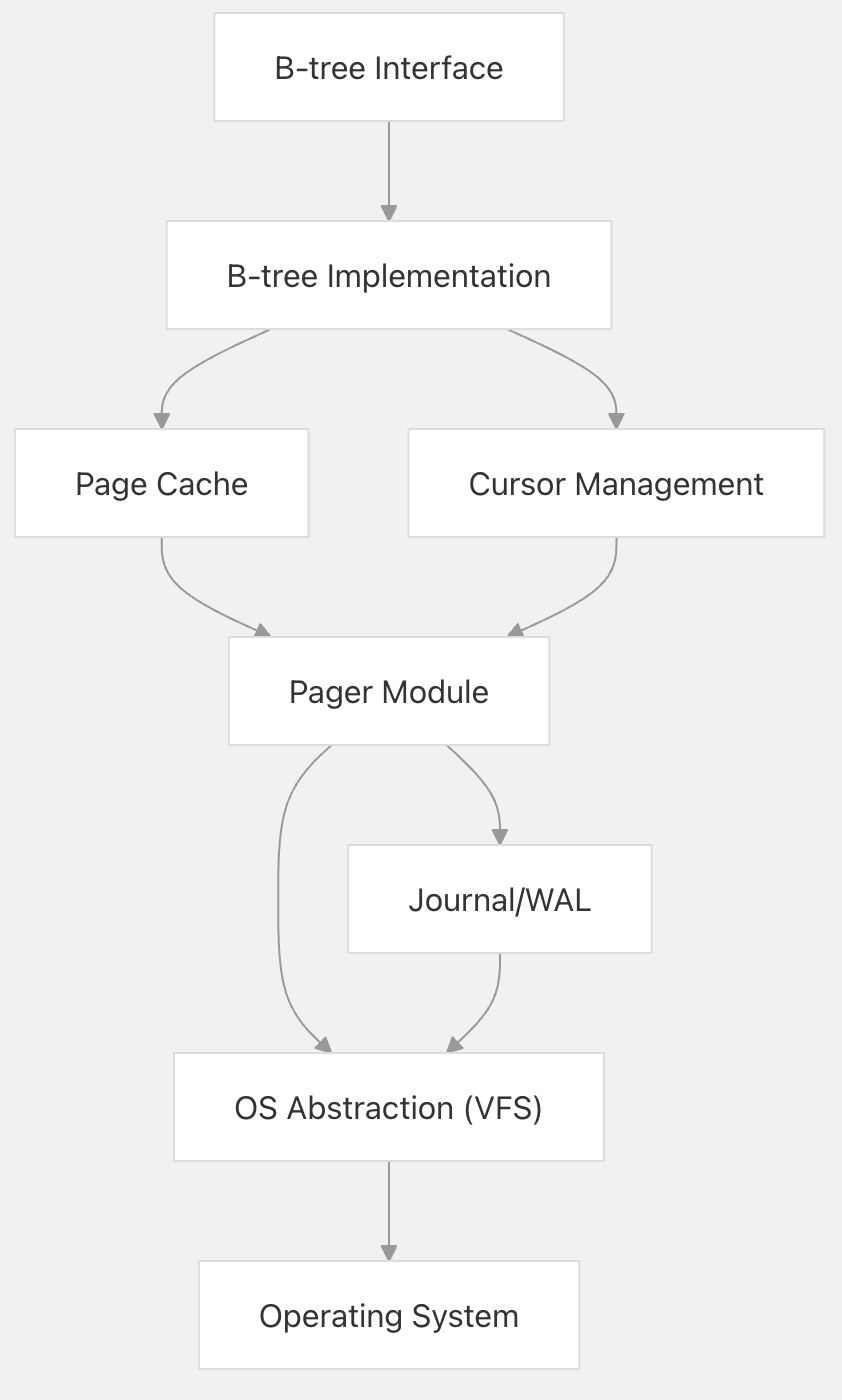
SQLite软件架构与实现源代码浅析
概述 SQLite 是一个用 C 语言编写的库,它成功打造出了一款小型、快速、独立、具备高可靠性且功能完备的 SQL 数据库引擎。本文档将为您简要介绍其架构、关键组件及其协同运作模式。 SQLite 显著特点之一是无服务器架构。不同于常规数据库,它并非以单独进…...

JAVA实战开源项目:精简博客系统 (Vue+SpringBoot) 附源码
本文项目编号 T 215 ,文末自助获取源码 \color{red}{T215,文末自助获取源码} T215,文末自助获取源码 目录 一、系统介绍二、数据库设计三、配套教程3.1 启动教程3.2 讲解视频3.3 二次开发教程 四、功能截图五、文案资料5.1 选题背景5.2 国内…...

Flink SQL 编程详解:从入门到实战难题与解决方案
Flink SQL 编程详解:从入门到实战难题与解决方案 Apache Flink 是当前流批一体实时计算的主流框架之一,而 Flink SQL 则为开发者提供了用 SQL 语言处理流式和批量数据的能力。本文将全面介绍 Flink SQL 的基础概念、编程流程、典型应用场景、常见难题及…...

GO+RabbitMQ+Gin+Gorm+docker 部署 demo
更多个人笔记见: github个人笔记仓库 gitee 个人笔记仓库 个人学习,学习过程中还会不断补充~ (后续会更新在github和 gitee上) 文章目录 目录准备运行测试postman检查容器 链接:项目连接,完整项目代码仓库下…...
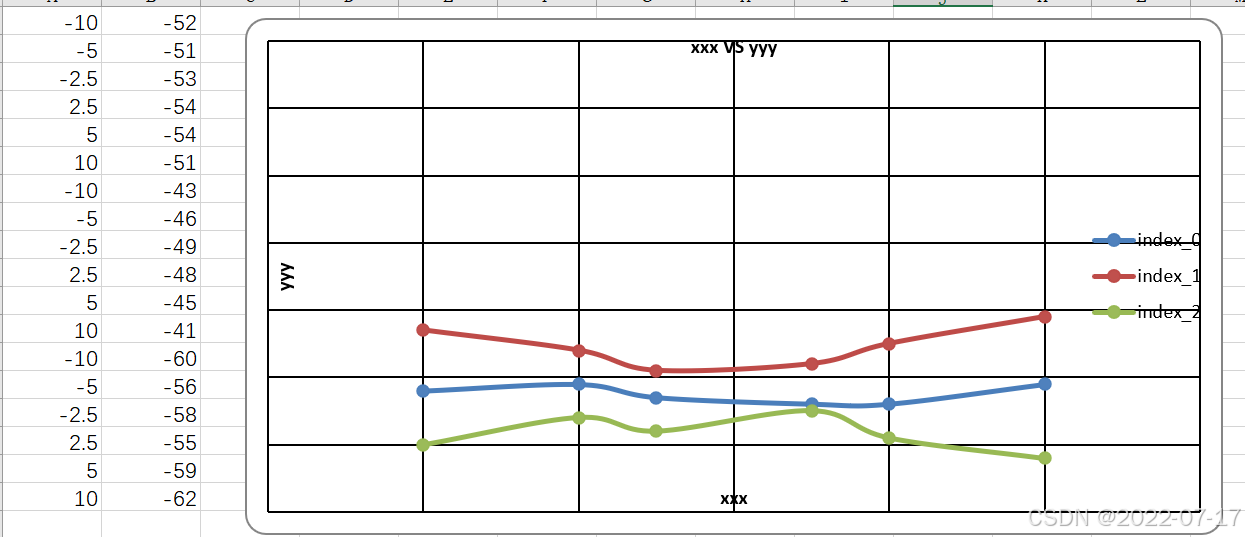
通过openpyxl在excel中插入散点图
实现代码 # -*- coding: utf-8 -*- """ Created on Sat May 31 23:30:12 2025author: anyone """from openpyxl import load_workbook from openpyxl.chart import ScatterChart, Reference, Series from openpyxl.chart.series import SeriesL…...

基于cornerstone3D的dicom影像浏览器 第二十五章 自定义VR调窗工具
文章目录 前言一、三维调窗原理二、自定义三维调窗工具三、调用流程1. 修改mprvr.js2. 修改DispalyerArea3D.vue3. view3d.vue4. Toolbar3D.vue 总结 前言 从cornerstoneTools BaseTool派生VolumeShiftColorTool,实现鼠标键按下并移动时,对3D窗口的pres…...

针对 Harmony-Cordova 性能优化,涵盖原生插件开发、线程管理和资源加载等关键场景
1. 原生图片处理插件(Java) package com.example.plugin; import ohos.media.image.ImageSource; import ohos.media.image.PixelMap; import ohos.app.Context; public class ImageProcessor { private final Context context; public ImagePro…...

【SCI论文实现】信息引导的高质量三维重建——系统架构设计 PYTHON
一、多模态数据采集与预处理模块 设计目标:解决动态场景中多源数据的时空对齐与质量优化问题,为后续特征提取提供高精度、强一致性的输入。 1.1 传感器配置逻辑 选择 RGB-D 相机(如 Kinect)与 LiDAR(如 Velodyne VLP-16)的互补组合,原因在于: RGB-D 相机提供高分辨率…...

经典面试题:一文了解常见的缓存问题
在面试过程中,面试官的桌子上摆放着很多高频的面试题,能否顺利回答决定了你面试通过的概率。其中缓存问题就是其中的一份,可以说掌握缓存问题及解决方法是面试前必须准备的内容。那么缓存有什么典型的问题,出现的原因是什么&#…...

Vue3处理number输入框避免NaN
在 Vue3 中处理 number 类型输入框避免显示 NaN,核心在于正确处理用户输入的非数字值。以下是几种解决方案: 方案1:使用字符串中转 计算属性(推荐) vue 复制 下载 <template><input v-model"input…...
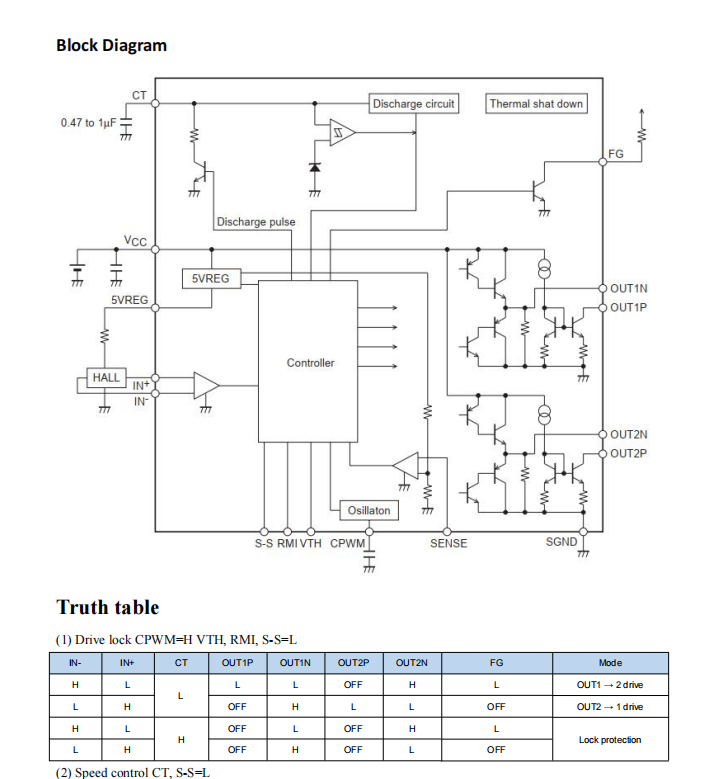
GC1267F:单相全波风扇电机预驱动芯片解析
在现代电子设备中,风扇电机的驱动控制是散热系统的关键组成部分。GC1267F 是一款由浙江新麦科技有限公司生产的单相全波风扇电机预驱动芯片,适用于需要大风量和大电流的服务器以及消费类电器风扇电机驱动。 芯片特性 GC1267F 支持外部 PWM 信号的变速功…...
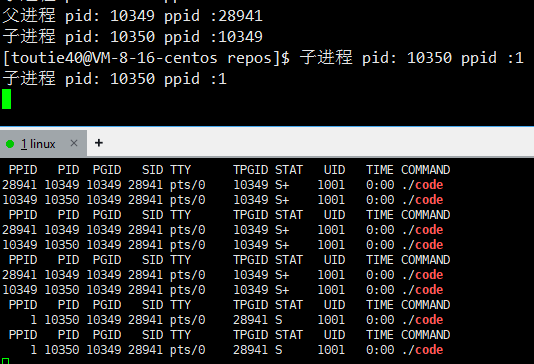
Linux --进程状态
目录 进程状态(宏观) Linux进程状态 进程状态的查看 进程状态(宏观) 为了了解Linux的进程状态,首先我们得了解进程状态,因为不仅仅是在Linux下有进程状态,macos和windows下都有进程状态,这里先解释的是一个宏观概念下的ÿ…...

如何设计一个支持线上线下的通用订单模块 —— 面向本地生活服务行业的架构思路
一、背景与目标 在本地生活服务行业中,订单模块作为连接用户、商户、商品、支付、履约的核心组件,支撑着平台内多样化的业务形态,例如外卖配送、到店服务、团购核销、即时零售、预约预订、线下消费等。 设计一个可支持线上线下融合的通用订…...

智能手机上用Termux安装php+Nginx
Termux的官方网站:Termux | The main termux site and help pages. 以下是在 Termux 上安装和配置 PHP Nginx 的完整流程总结,包含关键步骤和命令: 一、安装依赖 pkg update && pkg upgrade # 更新包列表和系统pkg install nginx p…...
)
【线上故障排查】缓存穿透攻击的识别与布隆过滤器(面试题 + 3 步追问应对 + 案例分析)
一、高频面试题 问题1:什么是缓存穿透?它对系统的核心危害是什么? 参考答案:缓存穿透指的是用户请求的数据在缓存和数据库中都不存在,导致请求直接绕过缓存打到数据库。核心危害是大量无效请求会耗尽数据库资源,比如CPU、内存或连接数,严重时可能引发数据库宕机,进而导…...
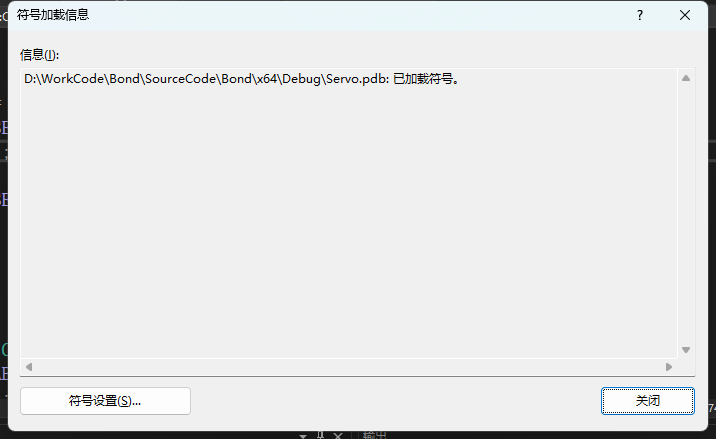
Visual Studio 调试中 PDB 与图像不匹配
Visual Studio 调试中 PDB 与图像不匹配 在使用 Visual Studio 进行本地或远程调试时,很多开发者会遇到 PDB 加载失败、符号不匹配的问题,甚至程序进程未退出,导致 .exe 文件无法成功覆盖。本文详细解析了从后台进程清理、构建产物验证、模块…...
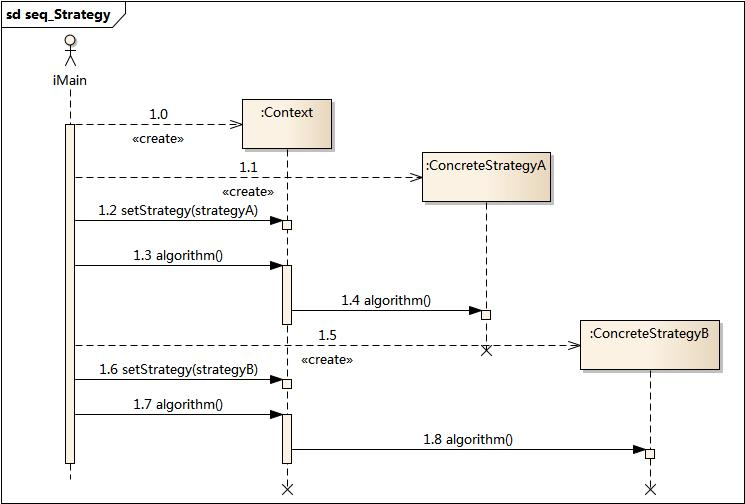
设计模式——策略设计模式(行为型)
摘要 策略设计模式是一种行为型设计模式,它定义了一系列算法并将每个算法封装起来,使它们可以相互替换。该模式让算法的变化独立于使用算法的客户,从而使得算法可以灵活地切换和扩展。其主要角色包括策略接口、具体策略类和环境类。策略模式…...

保持本地 Git 项目副本与远程仓库完全同步
核心目标: 保持本地 Git 项目副本与 GitHub 远程仓库完全同步。 关键方法: 定期执行 git pull 命令。 操作步骤: 进入项目目录: 在终端/命令行中,使用 cd 命令切换到你的项目文件夹。执行拉取命令: 运行…...

高效Excel数据净化工具:一键清除不可见字符与格式残留
摘要 本文将分享一款基于Python的Excel数据净化工具,用于自动清除给定的Excel文档中指定工作表中的不可见字符、批注、单元格样式等冗余数据。脚本支持进度可视化展示,保留核心数据处理逻辑的同时确保文件格式规整,特别适用于需要规范数据格…...
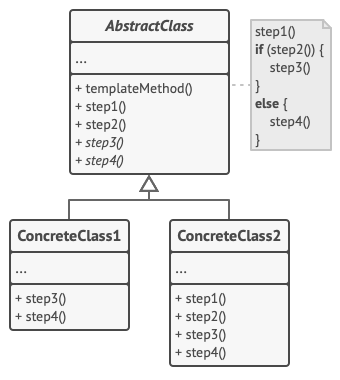
设计模式——模版方法设计模式(行为型)
摘要 模版方法设计模式是一种行为型设计模式,定义了算法的步骤顺序和整体结构,将某些步骤的具体实现延迟到子类中。它通过抽象类定义模板方法,子类实现抽象步骤,实现代码复用和算法流程控制。该模式适用于有固定流程但部分步骤可…...

Deepin 20.9社区版安装Docker
个人博客地址:Deepin 20.9社区版安装Docker | 一张假钞的真实世界 注意事项 Deepin 20.9 社区版安装 Docker 需要注意两点: 因为某些原因,Docker 官方源基本不可用,所以需要使用镜像源进行安装。当然也可以用安装包直接安装&am…...

Node.js 全栈技术栈的开发者,Web3 面试题
作为一名熟悉 Node.js 全栈技术栈的开发者,在面试 Web3 岗位时,通常会被问到涵盖 区块链原理、智能合约开发、安全性、前后端集成、常用库/协议等方面的问题。下面是我为你整理的 Web3 开发方向面试题清单,尤其适合有 Node.js 背景的全栈工程…...
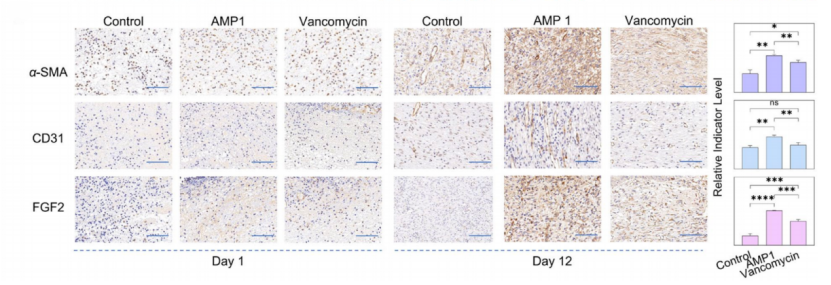
纯数据挖掘也能发Microbiome?
抗生素滥用导致多重耐药微生物在全球蔓延,但新型抗生素的研发进展缓慢,亟需找到替代抗生素的新型防御策略。抗菌肽(AMPs)作为天然防御分子,具有低耐药潜力和广谱活性。德国小蠊(Blattella germanica&#x…...

2025年05月30日Github流行趋势
项目名称:agenticSeek 项目地址url:https://github.com/Fosowl/agenticSeek项目语言:Python历史star数:13040今日star数:1864项目维护者:Fosowl, steveh8758, klimentij, ganeshnikhil, apps/copilot-pull-…...

跨平台猫咪桌宠 BongoCat v0.4.0 绿色版
—————【下 载 地 址】——————— 【本章下载一】:https://pan.xunlei.com/s/VORWH1a7lPhdwvon6DJgKvrNA1?pwdcw2h# 【本章下载二】:https://pan.quark.cn/s/c3ac86f4e296 【百款黑科技】:https://ucnygalh6wle.feishu.cn/wiki/…...
)
【课堂笔记】标签传播算法Label Propagation Algorithm(LPA)
文章目录 问题背景基本假设算法步骤数学原理解剖算法收敛性 问题背景 标签传播算法(Label Propagation Algorithm, LPA)主要解决的是数据标注不足的实际问题。在许多现实世界的机器学习任务中,获取大量标注数据(即带有正确标签的样…...
Dify案例实战之智能体应用构建(一)
一、部署dify Windows安装Docker部署dify,接入阿里云api-key进行rag测试-CSDN博客 可以参考我的前面文章,创建一个本地dify或者直接dify官网使用一样的(dify官网需要科学上网) 二、Dify案例实战之智能体 2.1 智能面试官 需求;…...
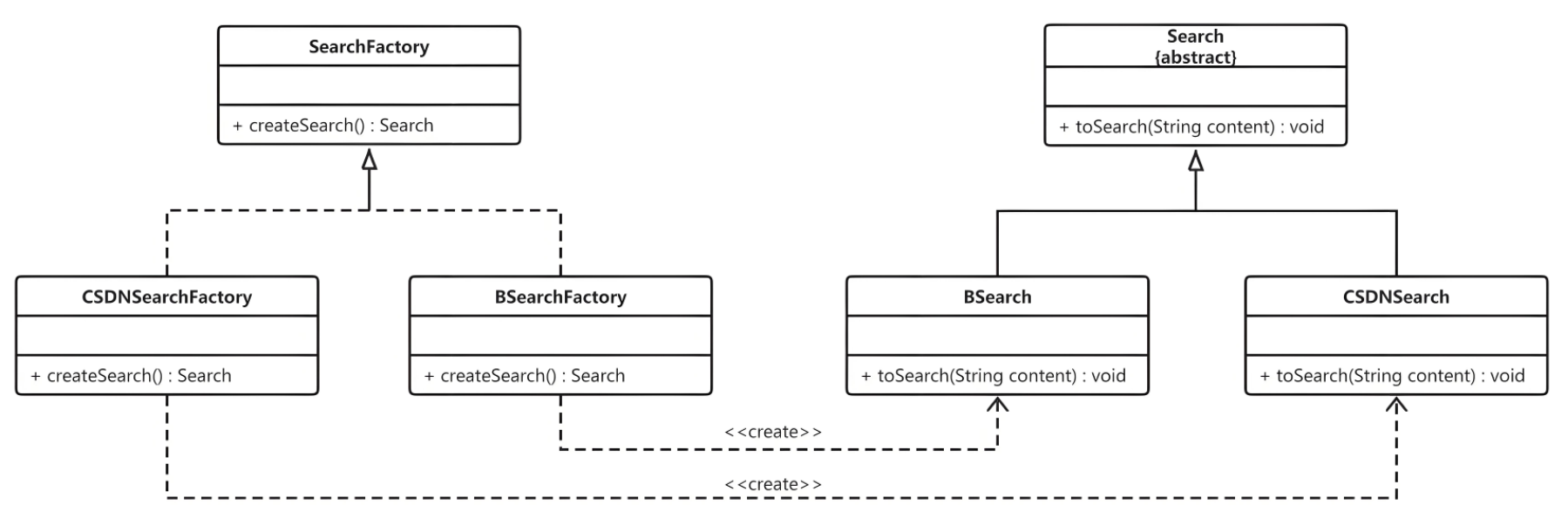
从模式到架构:Java 工厂模式的设计哲学与工程化实践
一、工厂模式概述 (一)定义与核心思想 工厂模式(Factory Pattern)是软件开发中常用的创建型设计模式,其核心思想是将对象的创建过程封装起来,通过工厂类来统一管理对象的创建逻辑。这种模式分离了对象的创…...