STM32 智能小车项目 L298N 电机驱动模块
今天开始着手做智能小车的项目了
在智能小车或机器人项目中,我们经常会听到一个词叫 “H 桥电机驱动”,尤其是常见的 L298N 模块,就是基于“双 H 桥”原理设计的。那么,“H 桥”到底是什么?为什么要用“双 H 桥”来驱动电机?。今天,我们就来深入讲解一种应用极为广泛的电机驱动模块——L298N,了解它的工作原理、引脚功能、接线方式及实际应用。
一、什么是 L298N?
L298N 是一款 双 H 桥电机驱动芯片,内部集成了两个全桥驱动器,能同时控制两个直流电机或一个步进电机。由于其稳定性好、价格低、接线方便,成为 Arduino、STM32、51 单片机等平台中最常见的电机驱动解决方案之一。
二.模块引脚与结构详解
L298N 模块通常包括如下接口:
1. 电源接口
| 引脚 | 功能描述 |
|---|---|
| VCC | 给电机供电(5~35V) |
| GND | 地线(逻辑地与电源地共用) |
| 5V | 给控制逻辑供电,或供外部单片机使用(视跳帽而定) |
注意:VCC 是电机电源输入,不是控制电压!
2. 控制引脚
| 引脚 | 功能 |
|---|---|
| IN1/IN2 | 控制电机 A 正反转 |
| IN3/IN4 | 控制电机 B 正反转 |
| ENA | 使能电机 A,同时用于 PWM 调速 |
| ENB | 使能电机 B,同时用于 PWM 调速 |
3. 输出接口
| 引脚 | 功能说明 |
|---|---|
| OUT1/OUT2 | 电机 A 输出 |
| OUT3/OUT4 | 电机 B 输出 |
三, H 桥原理简要回顾
H 桥是一种电路结构,用于改变电流方向以实现直流电机的正转、反转、刹车、停止等控制。
一个 H 桥控制一个电机的两个方向,两组 H 桥可控制两个电机,因此称为“双 H 桥”。
| IN1 | IN2 | 电机状态 |
|---|---|---|
| 高 | 低 | 正转 |
| 低 | 高 | 反转 |
| 高 | 高 | 刹车 |
| 低 | 低 | 停止(断电) |
ENA 和 ENB 输入 PWM 信号可以调节电机转速。
四,接线实例:L298N + STM32F103
一、硬件连接说明(以 STM32F103 为例)
| L298N 引脚 | 功能 | STM32 引脚 | 说明 |
|---|---|---|---|
| IN1 | 电机A控制 | PA0 | GPIO 输出 |
| IN2 | 电机A控制 | PA1 | GPIO 输出 |
| ENA | 电机A调速 | PA2 (TIM2_CH3) | PWM 输出 |
| IN3 | 电机B控制 | PA3 | GPIO 输出 |
| IN4 | 电机B控制 | PA4 | GPIO 输出 |
| ENB | 电机B调速 | PA5 (TIM2_CH1) | PWM 输出 |
| GND | 地 | GND | 必须共地 |
二、GPIO 初始化代码
void L298N_GPIO_Init(void){RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_3 | GPIO_Pin_4;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);}
三、PWM 初始化(使用 TIM2)
void PWM_Init(void){RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_5; // PA2 - CH3, PA5 - CH1GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;// 设置计数频率为 1MHz,PWM频率为1KHzTIM_TimeBaseStructure.TIM_Period = 1000 - 1; // ARRTIM_TimeBaseStructure.TIM_Prescaler = 72 - 1; // PSC (72MHz/72=1MHz)TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;// CH1 -> PA5 -> ENBTIM_OC1Init(TIM2, &TIM_OCInitStructure);TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Enable);// CH3 -> PA2 -> ENATIM_OC3Init(TIM2, &TIM_OCInitStructure);TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Enable);TIM_Cmd(TIM2, ENABLE);}
四、电机控制函数
// 电机A方向控制void MotorA_Dir(uint8_t dir){if (dir){GPIO_SetBits(GPIOA, GPIO_Pin_0);GPIO_ResetBits(GPIOA, GPIO_Pin_1);}else{GPIO_ResetBits(GPIOA, GPIO_Pin_0);GPIO_SetBits(GPIOA, GPIO_Pin_1);}}// 电机B方向控制void MotorB_Dir(uint8_t dir){if (dir){GPIO_SetBits(GPIOA, GPIO_Pin_3);GPIO_ResetBits(GPIOA, GPIO_Pin_4);}else{GPIO_ResetBits(GPIOA, GPIO_Pin_3);GPIO_SetBits(GPIOA, GPIO_Pin_4);}}// 电机A设置速度(0~1000)void MotorA_SetSpeed(uint16_t speed){TIM_SetCompare3(TIM2, speed); // TIM2_CH3 -> ENA}// 电机B设置速度(0~1000)void MotorB_SetSpeed(uint16_t speed){TIM_SetCompare1(TIM2, speed); // TIM2_CH1 -> ENB}
五、主函数调用示例
int main(void){L298N_GPIO_Init();PWM_Init();while (1){// 电机A正转,速度800MotorA_Dir(1);MotorA_SetSpeed(800);// 电机B反转,速度500MotorB_Dir(0);MotorB_SetSpeed(500);Delay_ms(2000);// 停止MotorA_SetSpeed(0);MotorB_SetSpeed(0);Delay_ms(1000);}}
五、总结
L298N 电机驱动模块是嵌入式开发中最经典的驱动方案之一,尤其适用于智能小车、遥控车、迷你机械臂等项目。虽然存在一定局限,但其稳定性、易用性和教学价值依旧使它成为初学者和高校课程中的首选模块。
如果你正在使用 STM32、Arduino、51 单片机等平台进行小车开发,掌握 L298N 模块的使用,将为你打下坚实的控制基础。
相关文章:

STM32 智能小车项目 L298N 电机驱动模块
今天开始着手做智能小车的项目了 在智能小车或机器人项目中,我们经常会听到一个词叫 “H 桥电机驱动”,尤其是常见的 L298N 模块,就是基于“双 H 桥”原理设计的。那么,“H 桥”到底是什么?为什么要用“双 H 桥”来驱动…...
SQL Transactions(事务)、隔离机制
目录 Why Transactions? Example: Bad Interaction Transactions ACID Transactions COMMIT ROLLBACK How the Transaction Log Works How Data Is Stored Example: Interacting Processes Interleaving of Statements Example: Strange Interleaving Fixing the…...

【动画】unity中实现骨骼蒙皮动画
我是一名资深的游戏客户端,没事的时候我就想手搓轮子 本文目标 搓一个骨骼动画的核心实现,促进理解骨骼动画本质 骨骼动画简介 官方解释上网搜或者问豆包 快速理解 想知道骨骼动画怎么个事要先知道模型是怎么个事 简单来说:模型 顶点数…...

VSCODE的终端无法执行npm命令
问题原因:PowerShell 默认可能限制脚本执行。 解决方法: 在 PowerShell 中运行以下命令,查看当前策略: Get-ExecutionPolicy 如果结果是 Restricted,改为 RemoteSigned: Set-ExecutionPolicy RemoteSigne…...

Langchian - 自定义提示词模板 提取结构化的数据
场景:从自然语言中提取固定结构信息返回 例如:根据一段文字,提取文字中人的具体特征 马路上走来一个1米7的女生,她一头乌黑的长发披在肩上随风飘动,在她旁边的是她的男朋友,叫:刘山;比她高10厘米 如果想要提取上面这句话中人的身高及头发的颜色,并以固定的格式返回,…...

【机器学习基础】机器学习入门核心:Jaccard相似度 (Jaccard Index) 和 Pearson相似度 (Pearson Correlation)
机器学习入门核心:Jaccard相似度 (Jaccard Index) 和 Pearson相似度 (Pearson Correlation) 一、算法逻辑Jaccard相似度 (Jaccard Index)**Pearson相似度 (Pearson Correlation)** 二、算法原理与数学推导1. Jaccard相…...

QT之头像剪裁效果实现
文章目录 源码地址,环境:QT5.15,MinGW32位效果演示导入图片设置剪裁区域创建剪裁小窗口重写剪裁小窗口的鼠标事件mousePressEventmouseMoveEventmouseReleaseEvent 小窗口移动触发父窗口的重绘事件剪裁效果实现 源码地址,环境&…...

apptrace 视角下移动端深度链接技术与优势
官网链接:AppTrace - 专业的移动应用推广追踪平台 App 拉起,本质上是移动端深度链接技术的具象化呈现。在这一领域,apptrace 凭借前沿技术与创新理念,实现从 H5 网页到 App 的无缝跳转,精准定位 App 内指定页面&#…...

微前端之micro-app数据通信
在这之前如果还没接触过微前端,可以找一些视频、资料先去了解一下,就不在这里赘述了。 现在常见的微前端框架包括: single-spa micro-app qiankun EMP 无界 目前了解到的基本上是这些哈,大家感兴趣可以自行去了解一下,看下它们之间的区别。 因为我目前使用的是mic…...
【GPT入门】第40课 vllm与ollama特性对比,与模型部署
【GPT入门】第40课 vllm与ollama特性对比,与模型部署 1.两种部署1.1 vllm与ollama特性对比2. vllm部署2.1 服务器准备2.1 下载模型2.2 提供模型服务 1.两种部署 1.1 vllm与ollama特性对比 2. vllm部署 2.1 服务器准备 在autodl 等大模型服务器提供商,…...

unity开发棋牌游戏
使用unity开发的棋牌游戏,目前包含麻将、斗地主、比鸡、牛牛四种玩法游戏。 相关技术 客户端:unity 热更新:xlua 服务器:c Web服务器:ruoyi 游戏视频 unity开发棋牌游戏 游戏截图...

Nat Commun项目文章 ▏小麦CUTTag助力解析转录因子TaTCP6调控小麦氮磷高效利用机制
今年2月份发表在《Nature Communications》(IF14.4)的“TaTCP6 is required for efficientand balanced utilization of nitrate and phosphorus in wheat”揭示了TaTCP6在小麦氮磷利用中的关键调控作用,为优化肥料利用和提高作物产量提供了理…...

Qt OpenGL 相机实现
在Qt中使用OpenGL实现相机功能主要涉及视图矩阵(view matrix)的操作,包括相机位置、观察方向和上向量等概念。下面我将介绍如何在Qt中实现一个基本的3D相机。 基本概念 OpenGL相机本质上是通过视图矩阵(view matrix)来实现的,它定义了从世界空间到观察…...

云原生时代 Kafka 深度实践:03进阶特性与最佳实践
3.1 数据可靠性与一致性 Producer 端可靠性策略 Kafka 通过acks参数控制消息确认机制,不同设置适用于不同场景: acks0:Producer 发送消息后不等待 Broker 确认,立即返回。这种模式吞吐量最高,但可能丢失消息&#x…...
)
基于关联表字段映射的批量数据更新 SQL 实现方案(AIGC)
UPDATE po_upfiles u JOIN po_micro m ON u.from_id = m.ent_id_old SET u.from_id = m.ent_id; 我的提问 批量更新po_upfiles数据中from_id=ent_id_old的数据中from_id为ent_id,语句怎么写“问题重新按照适合AI的逻辑进行提问,如何修改 精确版...
)
Hadoop复习(二)
部署Hadoop 考试不考部署,就复习选择和大题 问题 1 单项选择 2 / 2 分 下面哪个是MapReduce的核心配置文件 core-site.xml hdfs-site.xml yarn-site.xml mapred-site.xml 问题 2 单项选择 2 / 2 分 下面哪个是HDFS的核心配置文件 core-site.xml hdf…...
C 语言开发中常见的开发环境
目录 1.Dev-C 2.Visual Studio Code 3.虚拟机 Linux 环境 4.嵌入式 MCU 专用开发环境 1.Dev-C 使用集成的 C/C 开发环境(适合基础学习),下载链接Dev-C下载 - 官方正版 - 极客应用 2.Visual Studio Code 结合 C/C 扩展 GCC/MinGW 编译器,…...
vscode命令行debug
vscode命令行debug 一般命令行debug会在远程连服务器的时候用上,命令行debug的本质是在执行时暴露一个监听端口,通过进入这个端口,像本地调试一样进行。 这里提供两种方式: 直接在命令行中添加debugpy,适用于python…...
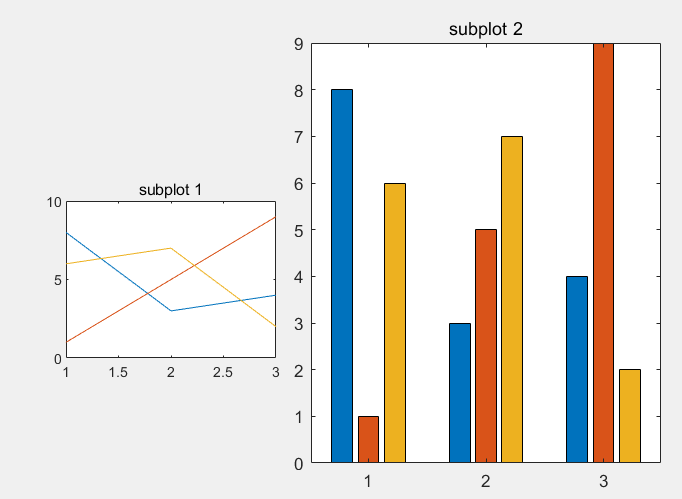
Matlab作图之 subplot
1. subplot(m, n, p) 将当前图形划分为m*n的网格,在 p 指定的位置创建坐标轴 matlab 按照行号对子图的位置进行编号 第一个子图是第一行第一列,第二个子图是第二行第二列......... 如果指定 p 位置存在坐标轴, 此命令会将已存在的坐标轴设…...

Springboot 项目一启动就获取HttpSession
在 Spring Boot 项目中,HttpSession 是有状态的,通常只有在用户发起 HTTP 请求并建立会话后才会创建。因此,在项目启动时(即应用刚启动还未处理任何请求)是无法获取到 HttpSession 的。 方法一:使用 HttpS…...

PostgreSQL的扩展 insert_username
PostgreSQL的扩展 insert_username insert_username 是 PostgreSQL 的一个实用扩展,用于自动记录数据行的创建者和最后修改者信息。这个扩展特别适合需要审计跟踪的应用场景。 一 扩展安装与启用 1.1 安装扩展 -- 使用超级用户安装 CREATE EXTENSION insert_use…...
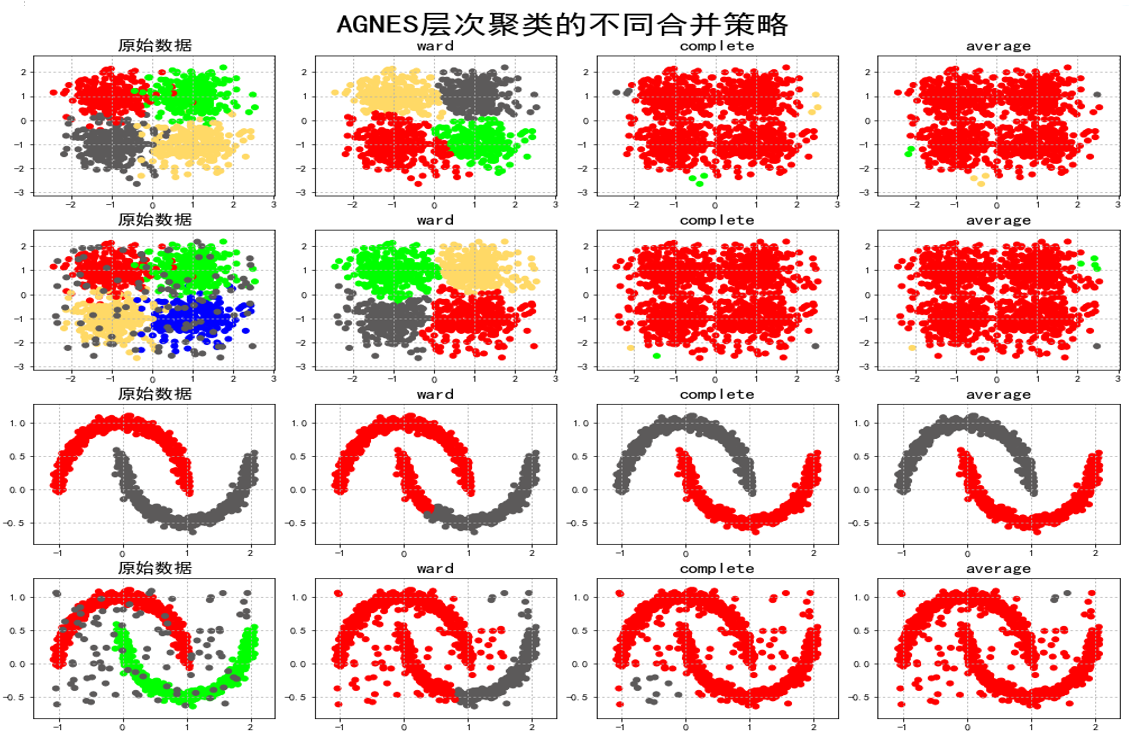
【机器学习基础】机器学习入门核心算法:层次聚类算法(AGNES算法和 DIANA算法)
机器学习入门核心算法:层次聚类算法(AGNES算法和 DIANA算法) 一、算法逻辑二、算法原理与数学推导1. 距离度量2. 簇间距离计算(连接标准)3. 算法伪代码(凝聚式) 三、模型评估1. 内部评估指标2. …...
Google Play的最新安全变更可能会让一些高级用户无法使用App
喜欢Root或刷机的Android用户要注意了,Google最近全面启用了新版Play Integrity API,可能会导致部分用户面临无法使用某些App的窘境。Play Integrity API是Google提供给开发者的工具,用于验证App是否在“未修改”的设备上运行。 许多重要应用…...

深度学习篇---人脸识别中的face-recognition库和深度学习
深度学习方法和使用 Python 的face_recognition库进行人脸识别在技术原理、实现方式和应用场景上有显著区别,以下从多个维度对比分析: 一、技术原理 1. 深度学习方法 核心逻辑:基于神经网络(如卷积神经网络 CNN)构建…...
java+ selenium->元素定位之By_tag_name)
(11)java+ selenium->元素定位之By_tag_name
1.简介 继续WebDriver关于元素定位,这篇介绍By ClassName。tagName是DOM结构的一部分,其中页面上的每个元素都是通过输入标签,按钮标签或锚定标签等标签定义的。每个标签都具有多个属性,例如ID,名称,值类等。就其他定位符而言在Selenium中,我们使用了标签的这些属性值来…...

React---day5
4、React的组件化 组件的分类: 根据组件的定义方式,可以分为:函数组件(Functional Component )和类组件(Class Component);根据组件内部是否有状态需要维护,可以分成:无状态组件(Stateless Component )和…...
Java开发之定时器学习
面试 一、线程池实现定时器 核心代码: public static void main(String[] args) {ScheduledExecutorService scheduledExecutorService Executors.newScheduledThreadPool(5);Runnable runnable () -> System.out.println("当前线程"Thread.current…...

HealthBench医疗AI评估基准:技术路径与核心价值深度分析(上)
引言:医疗AI评估的新范式 在人工智能技术迅猛发展的当下,医疗AI系统已逐渐从实验室走向临床应用。然而,医疗领域的特殊性要求这些系统不仅需要在技术指标上表现出色,更需要在实际临床场景中展现出可靠、安全且有效的性能。长期以来,医疗AI评估领域面临着三个核心挑战:评…...
Windows+VSCode搭建小智(xiaozhi)开发环境
作为一名DIY达人,肯定不会错过最近很火的“小智AI聊天机器人”,网上教程非常丰富,初级玩家可以直接在乐鑫官方下载ESP-IDF安装包并经过简单的菜单式配置后,即可进行代码编译和烧录(详见:Docs)。…...
VueScan Pro v9.8.45.08 一款图像扫描软件,中文绿色便携版
VueScan是著名的第三方底片扫描仪驱动程序,支持市场可见绝大多数型号的底片扫描仪,可以更为灵活地控制扫描过程,更深入地发掘硬件潜力,获取色彩 完美的高质量扫描结果。VueScan支持200种以上的底片类型,在剪取图像时制…...