MonoPCC:用于内窥镜图像单目深度估计的光度不变循环约束|文献速递-深度学习医疗AI最新文献
Title
题目
MonoPCC: Photometric-invariant cycle constraint for monocular depth estimation of endoscopic images
MonoPCC:用于内窥镜图像单目深度估计的光度不变循环约束
01
文献速递介绍
单目内窥镜是胃肠诊断和手术的关键医学成像工具,但其通常提供狭窄的视野(FOV)。3D场景重建有助于扩大视野,并通过与术前计算机断层扫描(CT)配准实现手术导航等更高级的应用。单目内窥镜图像的深度估计是重建3D结构的前提,但由于缺乏真实深度(GT)标签而极具挑战性。单目深度估计的典型解决方案依赖自监督学习,其核心思想是真实图像与扭曲图像之间的光度约束。具体而言,需要构建两个卷积神经网络(CNN):一个称为DepthNet,另一个称为PoseNet。这两个CNN分别估计每幅图像的深度图和每两个相邻图像的相机位姿变化,基于此,内窥镜视频中的源帧可以投影到3D空间并扭曲到另一帧的目标视图。DepthNet和PoseNet通过联合优化来最小化光度损失,该损失本质上是扭曲图像与目标图像之间的像素级差异。 然而,光源固定在内窥镜上并随相机移动,导致源帧和目标帧之间存在显著的亮度波动。由于近距离观察下的非朗伯反射,这一问题可能进一步恶化,如图1(a)-(b)所示。因此,在目标图像与扭曲后的源图像之间,亮度差异占主导地位(如图1(b)-(c)所示),从而误导了自监督学习中的光度约束。 为了增强亮度波动下光度约束的可靠性,研究人员已做出许多努力。一种直观的解决方案是预先校准内窥镜视频帧的亮度,可采用线性强度变换(Ozyoruk等人,2021)或训练好的外观流模型(Shao等人,2022)。然而,前者仅解决全局亮度不一致问题,后者由于引入繁重的计算而增加了训练难度。此外,外观流模型的可靠性也因弱自监督而无法始终得到保证,这可能导致错误修改与亮度变化无关的区域。 本文旨在不依赖任何辅助模型的情况下解决亮度不一致的瓶颈问题。我们的灵感来源于最近一种名为TC-Depth(Ruhkamp等人,2021)的方法,该方法引入循环扭曲来解决遮挡问题。TC-Depth将目标图像扭曲到源图像,然后再扭曲回自身以识别每个被遮挡的像素,因为他们假设被遮挡的像素无法精确返回原始位置。我们发现,这种循环扭曲可以自然克服亮度不一致问题,并且与仅从源到目标的扭曲相比,能产生更可靠的扭曲图像,如图1(b)-(d)所示。然而,直接应用循环扭曲通常在光度约束中失败,原因在于:(1)循环扭曲的两次双线性插值会过度模糊图像;(2)深度和位姿估计网络是主动学习的,这使得中间扭曲不稳定且难以收敛。 基于上述分析,我们提出了基于光度不变循环约束的单目深度估计方法(MonoPCC),该方法采用循环扭曲的思想,但对其进行了显著改进,使光度约束对不一致的亮度具有不变性。具体而言,MonoPCC从目标图像出发,沿着闭环路径(目标-源-目标)获取循环扭曲的目标图像,该图像继承了原始目标图像的一致亮度。为了使这种循环扭曲在光度约束中有效,MonoPCC采用了基于快速傅里叶变换(FFT)的无学习结构移植模块(STM),以最小化模糊效应的负面影响。STM通过从源图像“借用”相位频率部分来恢复中间扭曲图像中丢失的结构细节。此外,MonoPCC没有在目标-源和源-目标扭曲路径中共享网络权重,而是使用指数移动平均(EMA)策略连接这两条路径,以稳定第一条路径中的中间结果。 综上所述,我们的主要贡献如下: 1. 提出MonoPCC,通过简单采用循环形式的扭曲使光度约束对亮度变化具有不变性,消除了自监督学习中不一致亮度导致的误导。 2. 引入两种关键技术,即结构移植模块(STM)和基于EMA的稳定训练。STM恢复了插值导致的图像细节丢失,EMA稳定了前向扭曲。这些共同保证了MonoPCC在循环扭曲下的有效训练。 3. 在四个公开的内窥镜数据集(SCARED(Allan等人,2021)、SimCol3D(Rau等人,2023)、SERV-CT(Edwards等人,2022)和Hamlyn(Mountney等人,2010;Stoyanov等人,2010;Pratt等人,2010))以及一个公开的自然数据集KITTI(Geiger等人,2012)上进行了全面且广泛的实验。与八种最先进方法的比较结果表明,MonoPCC在四个内窥镜数据集上的绝对相对误差分别降低了7.27%、9.38%、9.90%和3.17%,显示出其优越性,以及在训练中抵抗亮度不一致的强大能力。此外,在KITTI上的比较结果进一步验证了MonoPCC即使在亮度变化通常不显著的自然场景中的竞争力。
Abatract
摘要
Photometric constraint is indispensable for self-supervised monocular depth estimation. It involves warping a source image onto a target view using estimated depth&pose, and then minimizing the difference between the warped and target images. However, the endoscopic built-in light causes significant brightness fluctuations, and thus makes the photometric constraint unreliable. Previous efforts only mitigate this relying on extra models to calibrate image brightness. In this paper, we propose MonoPCC to address the brightness inconsistency radically by reshaping the photometric constraint into a cycle form. Instead of only warping the source image, MonoPCC constructs a closed loop consisting of two opposite forward–backward warping paths: from target to source and then back to target. Thus, the target image finally receives an image cycle-warped from itself, which naturally makes the constraint invariant to brightness changes. Moreover, MonoPCC transplants the source image’s phase-frequency into the intermediate warped image to avoid structure lost, and also stabilizes the training via an exponential moving average (EMA) strategy to avoid frequent changes in the forward warping. The comprehensive and extensive experimental results on five datasets demonstrate that our proposed MonoPCC shows a great robustness to the brightness inconsistency, and exceeds other state-of-the-arts by reducing the absolute relative error by 7.27%, 9.38%, 9.90% and 3.17% on four endoscopic datasets, respectively; superior results on the outdoor dataset verify the competitiveness of MonoPCC for the natural scenario.
光度约束对于自监督单目深度估计至关重要。它涉及使用估计的深度和位姿将源图像扭曲到目标视图,然后最小化扭曲图像与目标图像之间的差异。然而,内窥镜的内置光源会导致显著的亮度波动,从而使光度约束不可靠。以往的研究仅依赖额外的模型来校准图像亮度以缓解这一问题。在本文中,我们提出MonoPCC,通过将光度约束重塑为循环形式,从根本上解决亮度不一致问题。 MonoPCC不再仅对源图像进行扭曲,而是构建了一个由两条相反的前向-后向扭曲路径组成的闭环:从目标到源,再回到目标。因此,目标图像最终会收到一个由其自身循环扭曲的图像,这自然使约束对亮度变化具有不变性。此外,MonoPCC将源图像的相位频率移植到中间扭曲图像中,以避免结构丢失,并通过指数移动平均(EMA)策略稳定训练,避免前向扭曲的频繁变化。 在五个数据集上进行的全面且广泛的实验结果表明,我们提出的MonoPCC对亮度不一致具有很强的鲁棒性,在四个内窥镜数据集上,其绝对相对误差分别比其他最先进方法降低了7.27%、9.38%、9.90%和3.17%;在户外数据集上的优异结果验证了MonoPCC在自然场景中的竞争力。
Method
方法
Fig. 2 illustrates the pipeline of MonoPCC, consisting of both forward and backward warping paths in the training phase. We first explain how to warp images for self-supervised learning in Section 3.1, and then detail the photometric-invariant principle of MonoPCC in Section 3.2, as well as its two key enabling techniques in Section 3.3 and Section 3.4, i.e., structure transplant module (STM) for avoiding detail lost and EMA between two paths for stabilizing the training.
图2展示了MonoPCC的训练流程,其中包括训练阶段的前向和后向扭曲路径。我们首先在3.1节中解释如何为自监督学习进行图像扭曲,然后在3.2节中详细介绍MonoPCC的光度不变性原理,并在3.3节和3.4节中阐述其两项关键支持技术,即用于避免细节丢失的结构移植模块(STM)和用于稳定训练的双路径指数移动平均(EMA)策略。
Conclusion
结论
Self-supervised monocular depth estimation is challenging for endoscopic scenes due to the severe negative impact of brightness fluctuations on the photometric constraint. In this paper, we propose a cycle-form warping to naturally overcome the brightness inconsistency of endoscopic images, and develop a MonoPCC for robust monocular depth estimation by using a re-designed photometric-invariant cycle constraint. To make the cycle-form warping effective in the photometric constraint, MonoPCC is equipped with two enabling techniques, i.e., structure transplant module (STM) and exponential moving average (EMA) strategy. STM alleviates image detail degradation to validate the backward warping, which uses the result of forward warping as input. EMA bridges the learning of network weights in the forward and backward warping, and stabilizes the intermediate warped image to ensure an effective convergence. The comprehensive and extensive comparisons with 8 state-of-the-arts on five public datasets, i.e., SCARED, SimCol3D, SERV-CT, Hamlyn, and KITTI, demonstrate that MonoPCC achieves a superior performance by decreasing the absolute relative error by 7.27%, 9.38%, 9.90% and 3.17% on four endoscopic datasets, respectively, and shows the competitiveness even for the natural scenario. Additionally, two ablation studies are conducted to confirm the effectiveness of three developed modules and the advancement of MonoPCC over other similar techniques against brightness fluctuations. Limitations. The current pipeline relies on a single frame to infer the depth map. Since each prediction is made independently, the model lacks perception of temporal consistency, meaning that the depth values at the same location may vary over time. This temporal inconsistency can lead to artifacts, such as overlapping tissue surfaces, as shown in the 3D reconstruction visualization in Fig. 12. Furthermore, our method is primarily designed for static endoscopic scenes. In dynamic scenarios involving tissue deformation, MonoPCC may not perform effectively. This is because the depth values at corresponding positions between source–target paired images can change locally, making it difficult to establish the cycle warping path consistently. Potential Future Application. In this paper, we have demonstrated the effectiveness of the PCC strategy for self-supervised monocular depth estimation in endoscopic images. We believe that our framework can be seamlessly integrated into other related tasks, such as stereo matching (Shi et al., 2023) and metric depth estimation (Wei et al., 2022, 2024), both of which face challenges due to brightness fluctuations. Additionally, in the field of NeRF-based scene reconstruction, several depth-prior-assisted methods (Wang et al., 2022; Li et al., 2024; Huang et al., 2024) utilize estimated depth to guide model training. Therefore, our depth estimator, designed specifically for endoscopic scenes, could also enhance the performance of such downstream tasks.
由于亮度波动对光度约束的严重负面影响,自监督单目深度估计在内窥镜场景中具有挑战性。本文提出一种循环形式的扭曲方法以自然克服内窥镜图像的亮度不一致性,并通过重新设计的光度不变循环约束开发了用于鲁棒单目深度估计的MonoPCC模型。为使循环扭曲在光度约束中有效,MonoPCC配备两项关键技术:结构移植模块(STM)和指数移动平均(EMA)策略。STM通过利用前向扭曲结果作为输入,缓解图像细节退化以支持后向扭曲;EMA则桥接前向与后向扭曲的网络权重学习,稳定中间扭曲图像以确保有效收敛。 在SCARED、SimCol3D、SERV-CT、Hamlyn和KITTI五个公开数据集上与8种最先进方法的全面对比表明,MonoPCC在四个内窥镜数据集上分别将绝对相对误差降低7.27%、9.38%、9.90%和3.17%,性能显著优于现有方法,甚至在自然场景中也展现出竞争力。此外,两项消融实验验证了三个模块的有效性,以及MonoPCC在抗亮度波动方面相较其他类似技术的先进性。 局限性:当前流程依赖单帧推断深度图,由于独立预测缺乏时间一致性感知,同一位置的深度值可能随时间变化,导致3D重建中出现组织表面重叠等伪影(如图12所示)。此外,方法主要针对静态内窥镜场景设计,在涉及组织变形的动态场景中可能失效——源-目标图像对的对应位置深度值可能局部变化,难以建立一致的循环扭曲路径。 潜在未来应用:本文验证了PCC策略在内窥镜图像自监督单目深度估计中的有效性。我们认为该框架可无缝集成到其他相关任务中,例如面临亮度波动挑战的立体匹配(Shi等,2023)和度量深度估计(Wei等,2022, 2024)。此外,在基于NeRF的场景重建领域,若干深度先验辅助方法(Wang等,2022;Li等,2024;Huang等,2024)利用估计深度指导模型训练,因此专为内窥镜场景设计的深度估计器也可提升此类下游任务的性能。
Figure
图
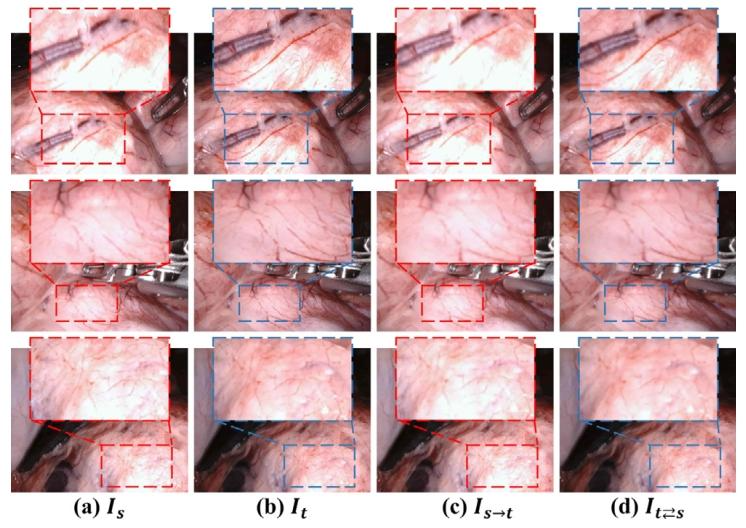
Fig. 1. (a)–(b) are the source ???? and target ???? frames. (c) is the warped image from the source to target. (d) is the cycle-warped image along the target–source–target path for reliable photometric constraint. Box contour colors distinguish different brightness patterns
图1 (a)-(b)为源图像(I_s)和目标图像(I_t)。 (c)为从源图像扭曲到目标视图的扭曲图像。 (d)为沿目标-源-目标路径的循环扭曲图像,用于构建可靠的光度约束。 方框轮廓颜色区分了不同的亮度模式。
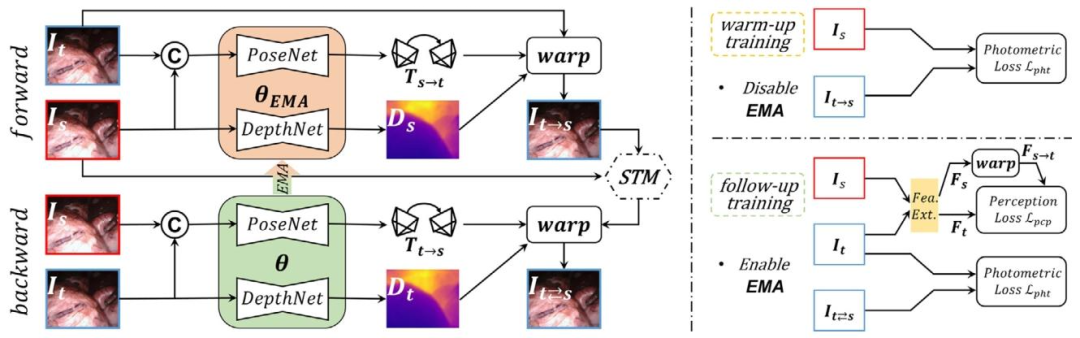
Fig. 2. The training pipeline of MonoPCC, which consists of forward and backward cascaded warping paths bridged by two enabling techniques, i.e., structure transplant module (STM) and exponential moving average (EMA). The training has two phases, i.e., warm-up to initialize the network weights for reasonable forward warping, and follow-up to resist the brightness changes. Different box contour colors code different brightness patterns. © means concatenation
图2 MonoPCC的训练流程,包含由两项关键技术——结构移植模块(STM)和指数移动平均(EMA)连接的前向和后向级联扭曲路径。训练分为两个阶段:一是用于初始化网络权重以实现合理前向扭曲的预热阶段,二是用于抵抗亮度变化的后续阶段。不同方框轮廓颜色编码不同的亮度模式,©表示拼接操作。
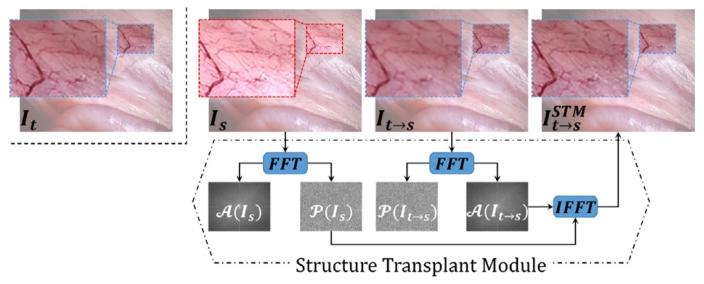
Fig. 3. Details of STM, which utilizes the phase-frequency of the source image ???? to replace that of the warped image ????→?? to avoid image detail lost.
图3 结构移植模块(STM)的细节示意图,该模块利用源图像(I_s)的相位频率替换扭曲图像(I_s\rightarrow I_t)的相位频率,以避免图像细节丢失。
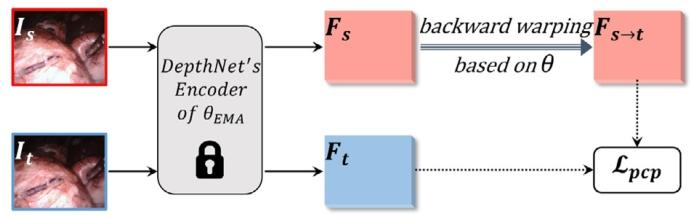
Fig. 4. The auxiliary perception constraint by backward warping the encoding feature maps instead of raw images.
图4 通过对编码特征图(而非原始图像)进行反向扭曲的辅助感知约束。
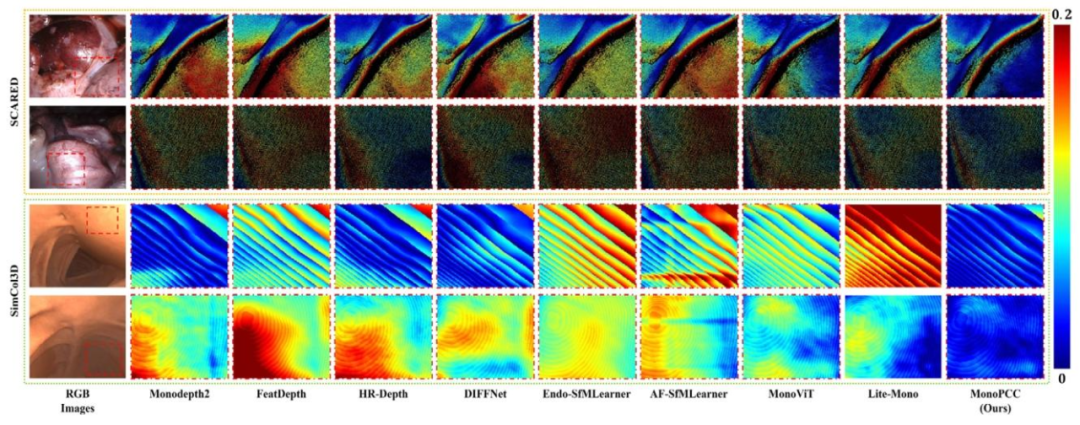
Fig. 5. The Abs Rel error maps of comparison methods on SCARED and SimCol3D, with close-up details highlighted. The regions of interest (ROIs) are outlined with red dashed lines, and the Opencv Jet Colormap is used for visualization
图5 在SCARED和SimCol3D数据集上对比方法的绝对相对误差(Abs Rel)图,突出显示了特写细节。感兴趣区域(ROI)用红色虚线勾勒,可视化采用OpenCV Jet颜色映射。
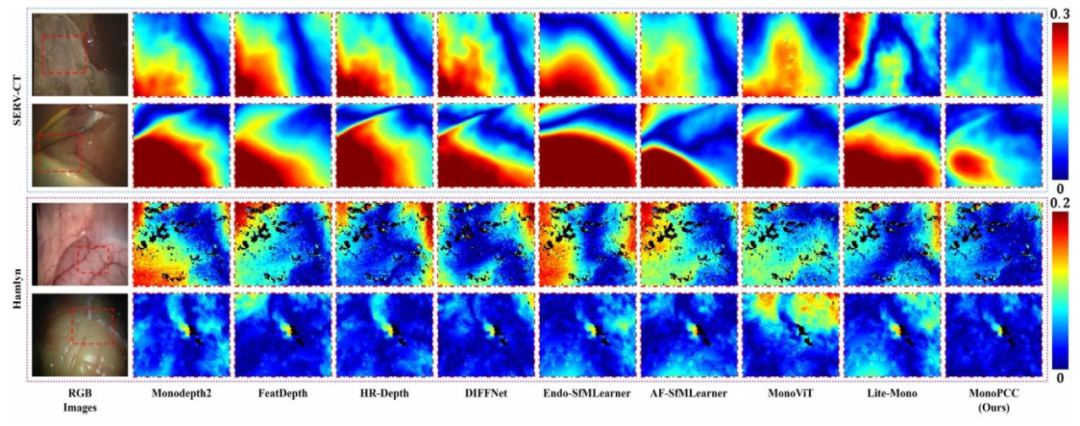
Fig. 6. The Abs Rel error maps of comparison methods on SERV-CT and Hamlyn, with close-up details highlighted. The regions of interest (ROIs) are outlined with red dashed lines, and the Opencv Jet Colormap is used for visualization.
图6 对比方法在SERV-CT和Hamlyn数据集上的绝对相对误差(Abs Rel)图,突出显示了特写细节。感兴趣区域(ROI)用红色虚线勾勒,可视化采用OpenCV Jet颜色映射。
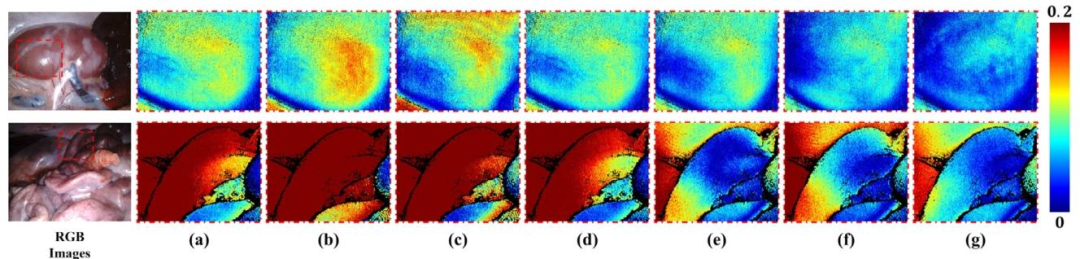
Fig. 7. The Abs Rel error maps of seven ablation variants, including effectiveness of three components, with close-up details highlighted. (a)–(g) correspond to the 1st to the 7th rows in Table 4. The regions of interest (ROIs) are outlined with red dashed lines, and the Opencv Jet Colormap is used for visualization.
图7 七种消融变体的绝对相对误差(Abs Rel)图,包括三个组件的有效性分析,突出显示了特写细节。(a)-(g)对应表4中的第1行至第7行。感兴趣区域(ROI)用红色虚线勾勒,可视化采用OpenCV Jet颜色映射。
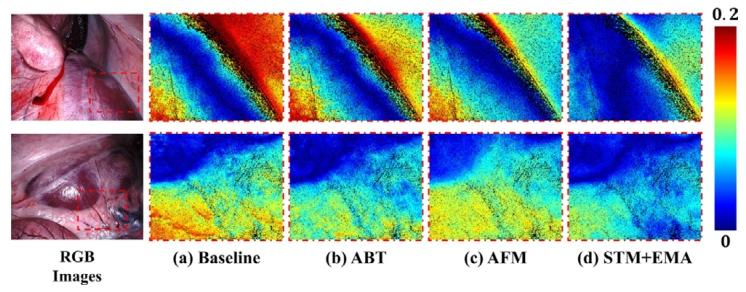
Fig. 8. The Abs Rel error maps of MonoPCC and other similar modules against photometric inconsistency, with close-up details highlighted. (a)–(d) correspond to the 1st to the 4th rows in Table 5. The regions of interest (ROIs) are outlined with red dashed lines, and the Opencv Jet Colormap is used for visualization
图8 MonoPCC与其他类似抗光度不一致模块的绝对相对误差(Abs Rel)图,突出显示了特写细节。(a)-(d)对应表5中的第1行至第4行。感兴趣区域(ROI)用红色虚线勾勒,可视化采用OpenCV Jet颜色映射
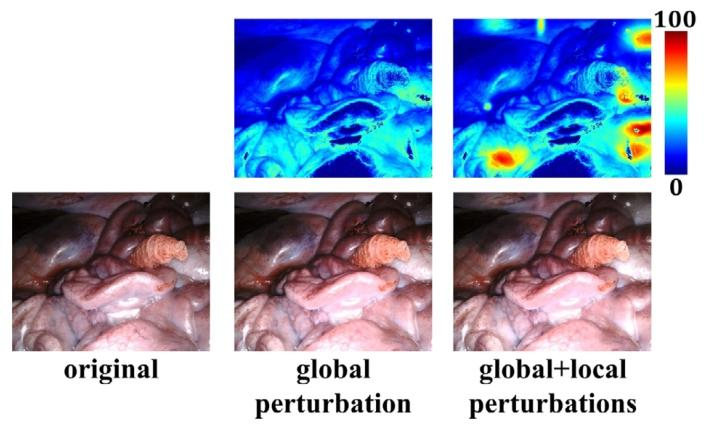
Fig. 9. An example of created brightness perturbation. From left to right is the original image, globally perturbated (?? = 1.2), and both globally and locally (bright spots) perturbated. The color-coded maps above them describe the subtractive difference between the perturbated image and its original one
图9 生成的亮度扰动示例。从左到右分别为原始图像、全局扰动图像((\gamma=1.2))、全局和局部(亮点)联合扰动图像。图像上方的彩色映射图表示扰动图像与原始图像的差值(减法运算结果)。
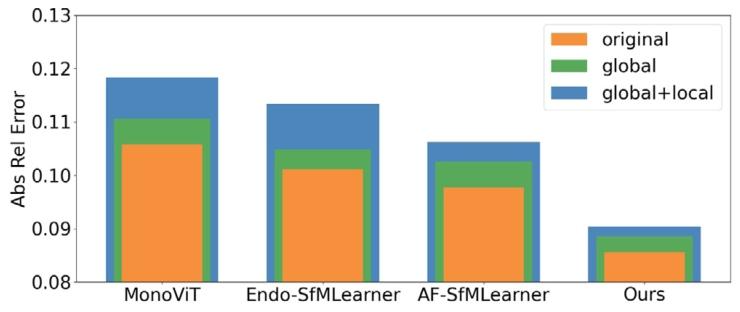
Fig. 10. The Abs Rel errors of different methods trained on the two brightnessperturbed copies of SCARED and the original SCARED
图10 在SCARED数据集的两个亮度扰动版本及原始数据集上训练的不同方法的绝对相对误差(Abs Rel)。
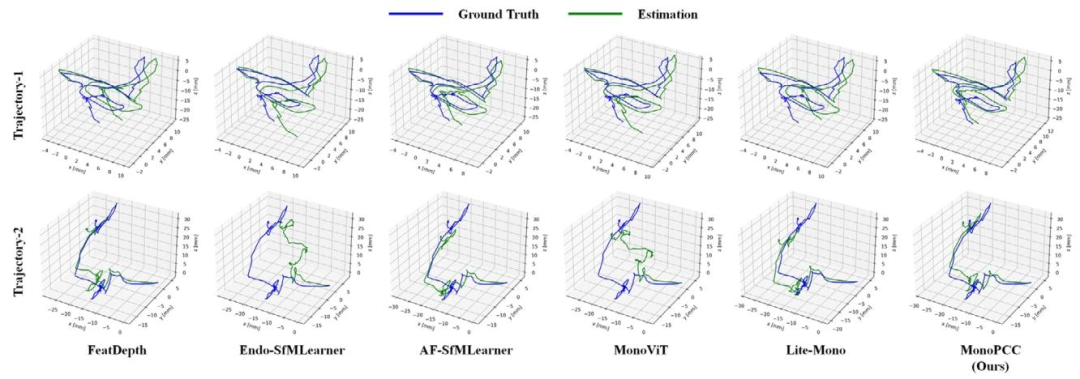
Fig. 11. The qualitative pose estimation comparison based on two SCARED trajectories.
图11 基于两条SCARED轨迹的定性位姿估计对比。
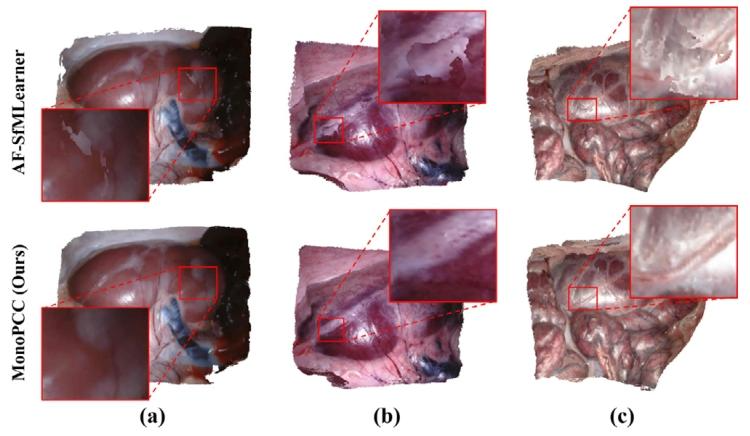
Fig. 12. Qualitative comparison results on the 3D scene reconstruction based on the estimated depth maps of two methods. The three sequences are selected from SCARED.
图12 基于两种方法估计深度图的3D场景重建定性对比结果。三个序列选自SCARED数据集。
Table
表
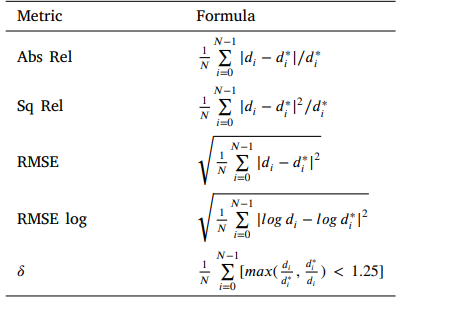
Table 1 Evaluation metrics of monocular depth estimation, where ?? refers to the number of valid pixels in depth maps, ???? and ?? ∗ ?? denote the estimated and GT depth of ??th pixel, respectively. The Iverson bracket [⋅] yields 1 if the statement is true, otherwise 0.
表1 单目深度估计的评估指标,其中 (N) 表示深度图中有效像素的数量,(\hat{d}i) 和 (d^*i) 分别表示第 (i) 个像素的估计深度和真实深度(GT)。艾弗森括号 ([\cdot]) 在条件为真时取值为1,否则为0。
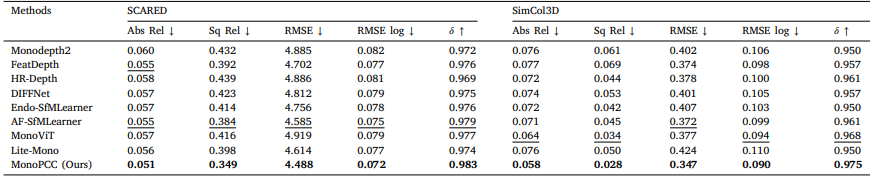
Table 2 Quantitative comparison results on SCARED and SimCol3D. The best results are marked in bold and the second-best underlined. The paired p-values between MonoPCC and others are all less than 0.05.
表2 在SCARED和SimCol3D数据集上的定量对比结果。最佳结果以粗体标注,次佳结果加下划线。MonoPCC与其他方法的配对p值均小于0.05。
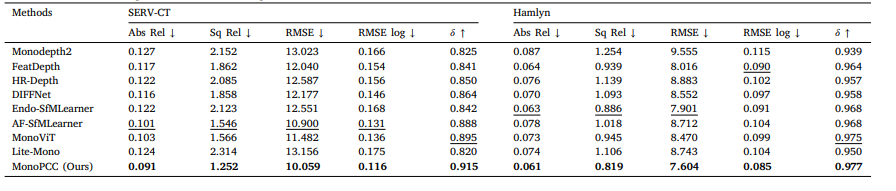
Table 3 Quantitative comparison results on SERV-CT and Hamlyn. The best results are marked in bold and the second-best underlined. The paired p-values between MonoPCC and others are all less than 0.05, except for ?? on SERV-CT compared to MonoViT
表3 在SERV-CT和Hamlyn数据集上的定量对比结果。最佳结果以粗体标注,次佳结果加下划线。除SERV-CT数据集上的??指标与MonoViT相比外,MonoPCC与其他方法的配对p值均小于0.05。

Table 4 The rows except the first one are the comparison results of the five variants and the complete MonoPCC, which are all cycle-constrained. The first row is the backbone MonoViT using the regular non-cycle constraint
表4 除第一行外,其余行均为五种变体与完整MonoPCC的对比结果,所有方法均采用循环约束。第一行为使用常规非循环约束的主干网络MonoViT。
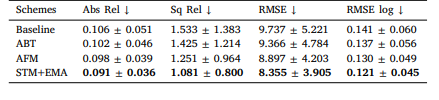
Table 5 Comparison results of different techniques for addressing the brightness fluctuations in self-supervised learning. The last row is the technique used in MonoPCC
表5 自监督学习中解决亮度波动的不同技术对比结果。最后一行为MonoPCC所使用的技术。
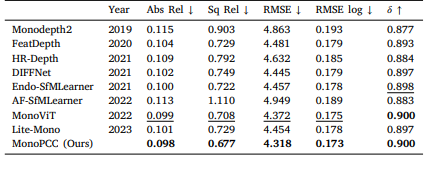
Table 6 Quantitative comparison results on KITTI. The best results are marked in bold and the second best ones are underlined
表6 在KITTI数据集上的定量对比结果。最佳结果以粗体标注,次佳结果加下划线。
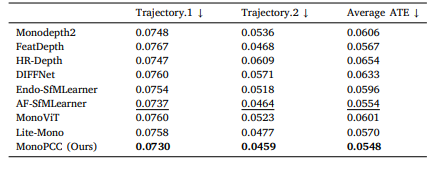
Table 7 Quantitative comparison results (Absolute Trajectory Error) of pose estimation on two trajectories of SCARED. The best results are marked in bold and the second-best underlined
表7 基于SCARED数据集两条轨迹的位姿估计定量对比结果(绝对轨迹误差)。最佳结果以粗体标注,次佳结果加下划线。
相关文章:
MonoPCC:用于内窥镜图像单目深度估计的光度不变循环约束|文献速递-深度学习医疗AI最新文献
Title 题目 MonoPCC: Photometric-invariant cycle constraint for monocular depth estimation of endoscopic images MonoPCC:用于内窥镜图像单目深度估计的光度不变循环约束 01 文献速递介绍 单目内窥镜是胃肠诊断和手术的关键医学成像工具,但其…...

如何计算H5页面加载时的白屏时间
计算 H5 页面加载时的 白屏时间(First Paint Time)是前端性能优化的重要指标,通常指从用户发起页面请求到浏览器首次渲染像素(如背景色、文字等)的时间。以下是几种常用的计算方法: 1. 使用 Performance AP…...
SpringAI系列 - MCP篇(三) - MCP Client Boot Starter
目录 一、Spring AI Mcp集成二、Spring AI MCP Client Stater三、spring-ai-starter-mcp-client-webflux集成示例3.1 maven依赖3.2 配置说明3.3 集成Tools四、通过SSE连接MCP Server五、通过STDIO连接MCP Server六、通过JSON文件配置STDIO连接一、Spring AI Mcp集成 Spring AI…...

【深度学习新浪潮】以Dify为例的大模型平台的对比分析
我们从核心功能、适用群体、易用性、可扩展性和安全性五个维度展开对比分析: 一、核心功能对比 平台核心功能多模型支持插件与工具链Dify低代码开发、RAG增强、Agent自律执行、企业级安全支持GPT-4/5、Claude、Llama3、Gemini及开源模型(如Qwen-VL-72B),支持混合模型组合可…...
Asp.net core 使用EntityFrame Work
安装以下Nuget 包 Microsoft.EntityFrameworkCore.Tools Microsoft.EntityFrameworkCore.Design Microsoft.AspNetCore.Diagnostics.EntityFrameworkCore Microsoft.EntityFrameworkCore.SqlServer或者Npgsql.EntityFrameworkCore.PostgreSQL 安装完上述Nuget包之后,在appset…...

isp中的 ISO代表什么意思
isp中的 ISO代表什么意思 在摄影和图像信号处理(ISP,Image Signal Processor)领域,ISO是一个用于衡量相机图像传感器对光线敏感度的标准参数。它最初源于胶片摄影时代的 “国际标准化组织(International Organization …...

AI Coding 资讯 2025-06-03
Prompt工程 RAG-MCP:突破大模型工具调用瓶颈,告别Prompt膨胀 大语言模型(LLM)在工具调用时面临Prompt膨胀和决策过载两大核心挑战。RAG-MCP创新性地引入检索增强生成技术,通过外部工具向量索引和动态检索机制,仅将最相关的工具信…...

2024年12月 C/C++(三级)真题解析#中国电子学会#全国青少年软件编程等级考试
C/C++编程(1~8级)全部真题・点这里 第1题:最近的斐波那契数 斐波那契数列 Fn 的定义为:对 n ≥ 0 有 Fn+2 = Fn+1 + Fn,初始值为 F0 = 0 和 F1 = 1。所谓与给定的整数 N 最近的斐波那契数是指与 N 的差之绝对值最小的斐波那契数。 本题就请你为任意给定的整数 N 找出与之最…...

3d GIS数据来源与编辑工具
1、卫星遥感 2、航空摄影测量 3、地面实测技术 全站仪 3维扫描 3D GIS数据制作全流程详解 一、数据采集:多源数据获取 3D GIS数据的制作需从多维度采集地理空间信息,以下是主要采集方式及适用场景: (一)遥感与航测…...

NeRF PyTorch 源码解读 - 体渲染
文章目录 1. 体渲染公式推导1.1. T ( t ) T(t) T(t) 的推导1.2. C ( r ) C(r) C(r) 的推导 2. 体渲染公式离散化3. 代码解读 1. 体渲染公式推导 如下图所示,渲染图像上点 P P P 的颜色值 c c c 是累加射线 O P → \overrightarrow{OP} OP 在近平面和远平面范围…...
SpringBoot 数据库批量导入导出 Xlsx文件的导入与导出 全量导出 数据库导出表格 数据处理 外部数据
介绍 poi-ooxml 是 Apache POI 项目中的一个库,专门用于处理 Microsoft Office 2007 及以后版本的文件,特别是 Excel 文件(.xlsx 格式)和 Word 文件(.docx 格式)。 在管理系统中需要对数据库的数据进行导…...
解决:install via Git URL失败的问题
为解决install via Git URL失败的问题,修改安全等级security_level的config.ini文件,路径如下: 还要重启: 1.reset 2.F5刷新页面 3.关机服务器,再开机(你也可以省略,试试) 4.Wind…...
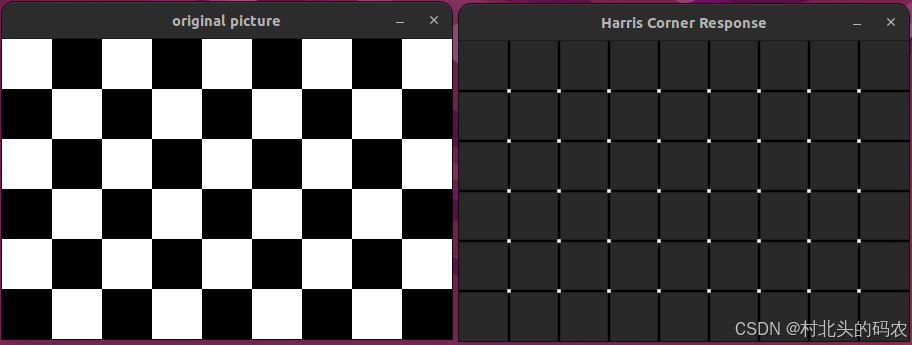
OpenCV CUDA模块特征检测------创建Harris角点检测器的GPU实现接口cv::cuda::createHarrisCorner
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 该函数创建一个 基于 Harris 算法的角点响应计算对象,专门用于在 GPU 上进行高效计算。 它返回的是一个 cv::Ptrcv::cuda::Cornernes…...
【氮化镓】钝化层对p-GaN HEMT阈值电压的影响
2021年5月13日,中国台湾阳明交通大学的Shun-Wei Tang等人在《Microelectronics Reliability》期刊发表了题为《Investigation of the passivation-induced VTH shift in p-GaN HEMTs with Au-free gate-first process》的文章。该研究基于二次离子质谱(SIMS)、光致发光(PL)…...

C++:优先级队列
目录 1. 概念 2. 特征 3. 优先级队列的使用 1. 概念 优先级队列虽然名字有队列二字,但根据队列特性来说优先级队列不满足先进先出这个特征,优先级队列的底层是用堆来实现的。 优先级队列是一种容器适配器,就是将特定容器类封装作为其底层…...
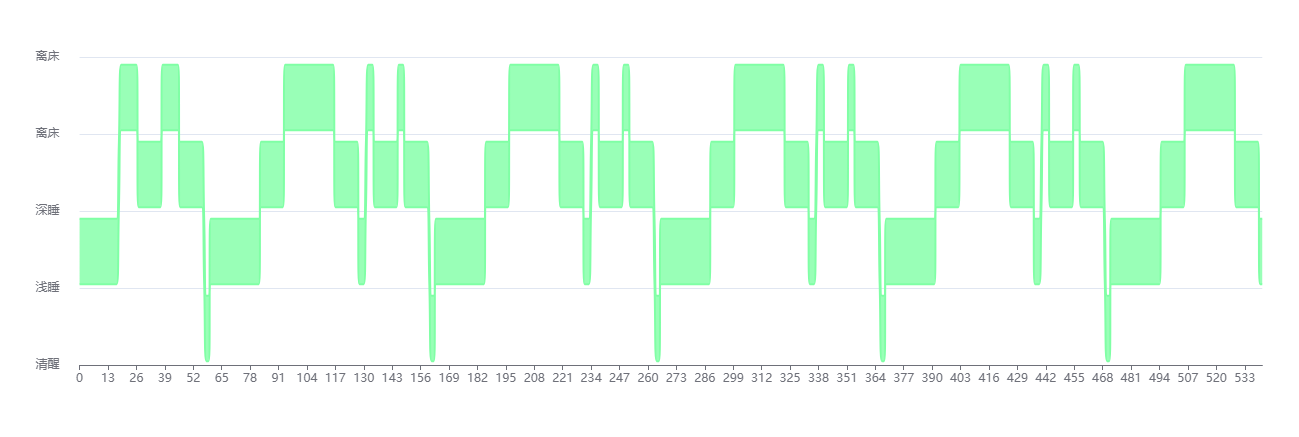
睡眠分期 html
截图 代码 <!DOCTYPE html> <html lang"zh-CN"><head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>睡眠图表</title><script src…...

Java求职者面试:Spring、Spring Boot、Spring MVC与MyBatis技术深度解析
Java求职者面试:Spring、Spring Boot、Spring MVC与MyBatis技术深度解析 一、第一轮提问(基础概念问题) 1. 请解释什么是Spring框架?它的核心功能是什么? JY:Spring是一个开源的Java/Java EE企业级应用开…...
Github 2025-05-29 Go开源项目日报Top9
根据Github Trendings的统计,今日(2025-05-29统计)共有9个项目上榜。根据开发语言中项目的数量,汇总情况如下: 开发语言项目数量Go项目9Assembly项目1Ollama: 本地大型语言模型设置与运行 创建周期:248 天开发语言:Go协议类型:MIT LicenseStar数量:42421 个Fork数量:27…...

前端项目种对某个文件夹进行大小写更改,git识别不到差异导致无变化
问题背景 开发过程中可能遇到一个文件名要更改大小写,但是更改后之后本地会有变化,但是git识别不到差异化,正常去更改一个文件名称git差异化会出现删除了原有文件,新增了一个新文件,但是更改大小写则不会 如何解决 在终端中输入git config…...
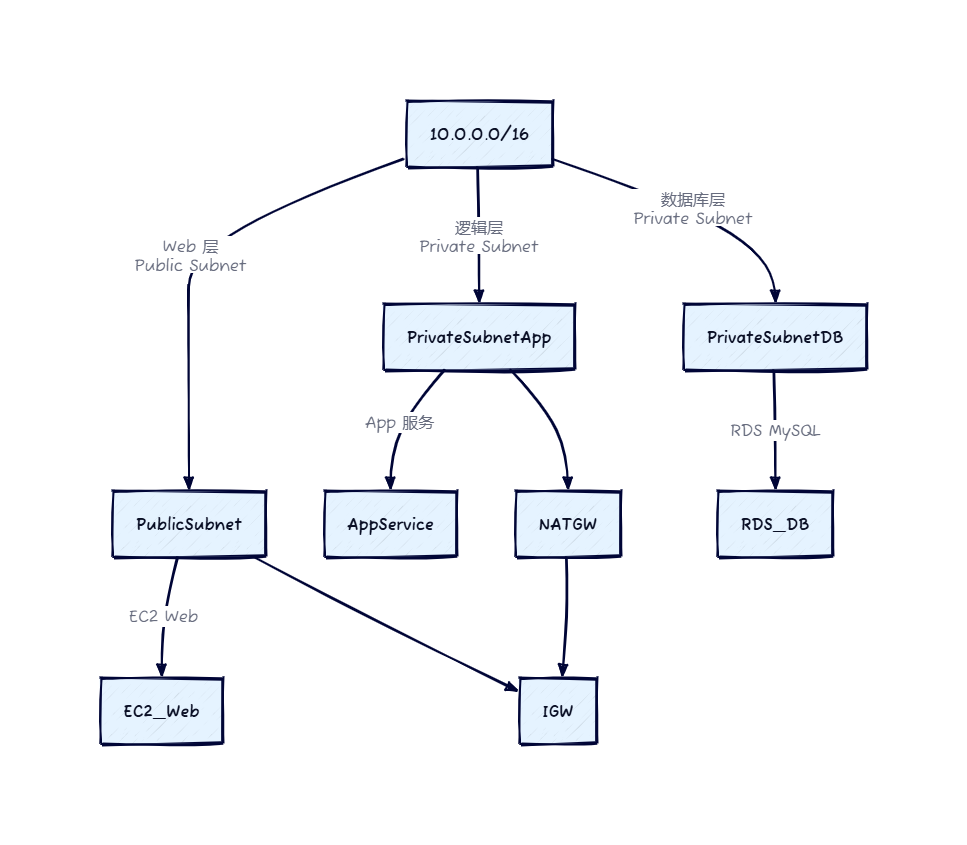
AWS VPC 网络详解:理解云上专属内网的关键要素
全面解读 AWS VPC、子网、安全组、路由与 NAT 网关的实际应用 在使用 AWS 云服务的过程中,许多用户最先接触的是 EC2(云服务器)。但你是否曾遇到过这样的情况:实例启动正常,却无法访问公网?或者数据库无法…...
Ubuntu24.04.2 + kubectl1.33.1 + containerdv1.7.27 + calicov3.30.0
Ubuntu24.04.2 kubectl1.33.1 containerdv1.7.27 calicov3.30.0 安装Ubuntu24.04.2 kubectl1.33.1 containerdv1.7.27 calicov3.30.0 1.安装Ubuntu24.04.2,设置阿里云镜像地址 $ sudo vim /etc/apt/sources.list.d/ubuntu.sources URIs: https://mirrors.aliy…...

循环神经网络(RNN)全面教程:从原理到实践
循环神经网络(RNN)全面教程:从原理到实践 引言 循环神经网络(Recurrent Neural Network, RNN)是处理序列数据的经典神经网络架构,在自然语言处理、语音识别、时间序列预测等领域有着广泛应用。本文将系统介绍RNN的核心概念、常见变体、实现方法以及实际…...
uniapp 键盘顶起页面问题
关于uniapp中键盘顶起页面的问题。这是一个在移动应用开发中常见的问题,特别是当输入框位于页面底部时,键盘弹出会顶起整个页面,导致页面布局错乱。 pages.json 文件内,在需要处理软键盘的页面添加 softinputMode 配置࿱…...

利用TOA与最小二乘法直接求解
为了利用到达时间(TOA)和最小二乘法直接求解,我们首先需要理解TOA定位的基本原理和最小二乘法的应用。 步骤1: 理解TOA定位原理 到达时间(TOA)定位是通过测量信号从发射源到达接收器的时间来确定位置的一种方法。假设…...

SpringBoot系列之RabbitMQ 实现订单超时未支付自动关闭功能
系列博客专栏: JVM系列博客专栏SpringBoot系列博客 RabbitMQ 实现订单超时自动关闭功能:从原理到实践的全流程解析 一、业务场景与技术选型 在电商系统中,订单超时未支付自动关闭功能是保障库存准确性、提升用户体验的核心机制。传统定时任…...
【C++高级主题】命令空间(五):类、命名空间和作用域
目录 一、实参相关的查找(ADL):函数调用的 “智能搜索” 1.1 ADL 的核心规则 1.2 ADL 的触发条件 1.3 ADL 的典型应用场景 1.4 ADL 的潜在风险与规避 二、隐式友元声明:类与命名空间的 “私密通道” 2.1 友元声明的基本规则…...

ArcGIS Pro 3.4 二次开发 - 地图创作 1
环境:ArcGIS Pro SDK 3.4 + .NET 8 文章目录 ArcGIS Pro 3.4 二次开发 - 地图创作 11 样式管理1.1 如何通过名称获取项目中的样式1.2 如何创建新样式1.3 如何向项目添加样式1.4 如何从项目中移除样式1.5 如何向样式添加样式项1.6 如何从样式中移除样式项1.7 如何判断样式是否可…...

2.1HarmonyOS NEXT开发工具链进阶:DevEco Studio深度实践
HarmonyOS NEXT开发工具链进阶:DevEco Studio深度实践 在HarmonyOS NEXT全栈自研的技术体系下,DevEco Studio作为一站式开发平台,通过深度整合分布式开发能力,为开发者提供了从代码编写到多端部署的全流程支持。本章节将围绕多设…...

MyBatis常用注解全解析:从基础CRUD到高级映射
MyBatis常用注解全解析:从基础CRUD到高级映射 本文全面解析MyBatis核心注解体系,涵盖基础操作、动态SQL、关系映射等高级特性,助你彻底掌握MyBatis注解开发精髓 一、MyBatis注解概述 1.1 注解 vs XML配置 MyBatis同时支持XML配置和注解两种…...
国标GB28181设备管理软件EasyGBS视频平台筑牢文物保护安全防线创新方案
一、方案背景 文物作为人类文明的珍贵载体,具有不可再生性。当前,盗窃破坏、游客不文明行为及自然侵蚀威胁文物安全,传统保护手段存在响应滞后、覆盖不全等局限。随着5G与信息技术发展,基于GB28181协议的EasyGBS视频云平台&…...