Python打卡第46天
@浙大疏锦行
注意力
注意力机制是一种让模型学会「选择性关注重要信息」的特征提取器,就像人类视觉会自动忽略背景,聚焦于图片中的主体(如猫、汽车)。
从数学角度看,注意力机制是对输入特征进行加权求和,输出=∑(输入特征×注意力权重),其中注意力权重是学习到的。所以他和卷积很像,因为卷积也是一种加权求和。但是卷积是 “固定权重” 的特征提取(如 3x3 卷积核)--训练完了就结束了,注意力是 “动态权重” 的特征提取(权重随输入数据变化)---输入数据不同权重不同。
问:为什么需要多种注意力模块?
答:因为不同场景下的关键信息分布不同。例如,识别鸟类和飞机时,需关注 “羽毛纹理”“金属光泽” 等特定通道的特征,通道注意力可强化关键通道;而物体位置不确定时(如猫出现在图像不同位置),空间注意力能聚焦物体所在区域,忽略背景。复杂场景中,可能需要同时关注通道和空间(如混合注意力模块 CBAM),或处理长距离依赖(如全局注意力模块 Non-local)。
问:为什么不设计一个‘万能’注意力模块?
答:主要受效率和灵活性限制。专用模块针对特定需求优化计算,成本更低(如通道注意力仅需处理通道维度,无需全局位置计算);不同任务的核心需求差异大(如医学图像侧重空间定位,自然语言处理侧重语义长距离依赖),通用模块可能冗余或低效。每个模块新增的权重会增加模型参数量,若训练数据不足或优化不当,可能引发过拟合。因此实际应用中需结合轻量化设计(如减少全连接层参数)、正则化(如 Dropout)或结构约束(如共享注意力权重)来平衡性能与复杂度。
通道注意力(Channel Attention)属于**注意力机制(Attention Mechanism)的变体**,而非自注意力(Self-Attention)的直接变体。可以理解为注意力是一个动物园算法,里面很多个物种,自注意力只是一个分支,因为开创了transformer所以备受瞩目。我们今天的内容用通道注意力举例
常见注意力模块的归类如下

简单CNN的训练
import torch
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transforms
from torch.utils.data import DataLoader
import matplotlib.pyplot as plt
import numpy as np# 设置中文字体支持
plt.rcParams["font.family"] = ["SimHei"]
plt.rcParams['axes.unicode_minus'] = False # 解决负号显示问题# 检查GPU是否可用
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(f"使用设备: {device}")# 1. 数据预处理
# 训练集:使用多种数据增强方法提高模型泛化能力
train_transform = transforms.Compose([# 随机裁剪图像,从原图中随机截取32x32大小的区域transforms.RandomCrop(32, padding=4),# 随机水平翻转图像(概率0.5)transforms.RandomHorizontalFlip(),# 随机颜色抖动:亮度、对比度、饱和度和色调随机变化transforms.ColorJitter(brightness=0.2, contrast=0.2, saturation=0.2, hue=0.1),# 随机旋转图像(最大角度15度)transforms.RandomRotation(15),# 将PIL图像或numpy数组转换为张量transforms.ToTensor(),# 标准化处理:每个通道的均值和标准差,使数据分布更合理transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010))
])# 测试集:仅进行必要的标准化,保持数据原始特性,标准化不损失数据信息,可还原
test_transform = transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010))
])# 2. 加载CIFAR-10数据集
train_dataset = datasets.CIFAR10(root='./data',train=True,download=True,transform=train_transform # 使用增强后的预处理
)test_dataset = datasets.CIFAR10(root='./data',train=False,transform=test_transform # 测试集不使用增强
)# 3. 创建数据加载器
batch_size = 64
train_loader = DataLoader(train_dataset, batch_size=batch_size, shuffle=True)
test_loader = DataLoader(test_dataset, batch_size=batch_size, shuffle=False)
# 4. 定义CNN模型的定义(替代原MLP)
class CNN(nn.Module):def __init__(self):super(CNN, self).__init__() # 继承父类初始化# ---------------------- 第一个卷积块 ----------------------# 卷积层1:输入3通道(RGB),输出32个特征图,卷积核3x3,边缘填充1像素self.conv1 = nn.Conv2d(in_channels=3, # 输入通道数(图像的RGB通道)out_channels=32, # 输出通道数(生成32个新特征图)kernel_size=3, # 卷积核尺寸(3x3像素)padding=1 # 边缘填充1像素,保持输出尺寸与输入相同)# 批量归一化层:对32个输出通道进行归一化,加速训练self.bn1 = nn.BatchNorm2d(num_features=32)# ReLU激活函数:引入非线性,公式:max(0, x)self.relu1 = nn.ReLU()# 最大池化层:窗口2x2,步长2,特征图尺寸减半(32x32→16x16)self.pool1 = nn.MaxPool2d(kernel_size=2, stride=2) # stride默认等于kernel_size# ---------------------- 第二个卷积块 ----------------------# 卷积层2:输入32通道(来自conv1的输出),输出64通道self.conv2 = nn.Conv2d(in_channels=32, # 输入通道数(前一层的输出通道数)out_channels=64, # 输出通道数(特征图数量翻倍)kernel_size=3, # 卷积核尺寸不变padding=1 # 保持尺寸:16x16→16x16(卷积后)→8x8(池化后))self.bn2 = nn.BatchNorm2d(num_features=64)self.relu2 = nn.ReLU()self.pool2 = nn.MaxPool2d(kernel_size=2) # 尺寸减半:16x16→8x8# ---------------------- 第三个卷积块 ----------------------# 卷积层3:输入64通道,输出128通道self.conv3 = nn.Conv2d(in_channels=64, # 输入通道数(前一层的输出通道数)out_channels=128, # 输出通道数(特征图数量再次翻倍)kernel_size=3,padding=1 # 保持尺寸:8x8→8x8(卷积后)→4x4(池化后))self.bn3 = nn.BatchNorm2d(num_features=128)self.relu3 = nn.ReLU() # 复用激活函数对象(节省内存)self.pool3 = nn.MaxPool2d(kernel_size=2) # 尺寸减半:8x8→4x4# ---------------------- 全连接层(分类器) ----------------------# 计算展平后的特征维度:128通道 × 4x4尺寸 = 128×16=2048维self.fc1 = nn.Linear(in_features=128 * 4 * 4, # 输入维度(卷积层输出的特征数)out_features=512 # 输出维度(隐藏层神经元数))# Dropout层:训练时随机丢弃50%神经元,防止过拟合self.dropout = nn.Dropout(p=0.5)# 输出层:将512维特征映射到10个类别(CIFAR-10的类别数)self.fc2 = nn.Linear(in_features=512, out_features=10)def forward(self, x):# 输入尺寸:[batch_size, 3, 32, 32](batch_size=批量大小,3=通道数,32x32=图像尺寸)# ---------- 卷积块1处理 ----------x = self.conv1(x) # 卷积后尺寸:[batch_size, 32, 32, 32](padding=1保持尺寸)x = self.bn1(x) # 批量归一化,不改变尺寸x = self.relu1(x) # 激活函数,不改变尺寸x = self.pool1(x) # 池化后尺寸:[batch_size, 32, 16, 16](32→16是因为池化窗口2x2)# ---------- 卷积块2处理 ----------x = self.conv2(x) # 卷积后尺寸:[batch_size, 64, 16, 16](padding=1保持尺寸)x = self.bn2(x)x = self.relu2(x)x = self.pool2(x) # 池化后尺寸:[batch_size, 64, 8, 8]# ---------- 卷积块3处理 ----------x = self.conv3(x) # 卷积后尺寸:[batch_size, 128, 8, 8](padding=1保持尺寸)x = self.bn3(x)x = self.relu3(x)x = self.pool3(x) # 池化后尺寸:[batch_size, 128, 4, 4]# ---------- 展平与全连接层 ----------# 将多维特征图展平为一维向量:[batch_size, 128*4*4] = [batch_size, 2048]x = x.view(-1, 128 * 4 * 4) # -1自动计算批量维度,保持批量大小不变x = self.fc1(x) # 全连接层:2048→512,尺寸变为[batch_size, 512]x = self.relu3(x) # 激活函数(复用relu3,与卷积块3共用)x = self.dropout(x) # Dropout随机丢弃神经元,不改变尺寸x = self.fc2(x) # 全连接层:512→10,尺寸变为[batch_size, 10](未激活,直接输出logits)return x # 输出未经过Softmax的logits,适用于交叉熵损失函数# 初始化模型
model = CNN()
model = model.to(device) # 将模型移至GPU(如果可用)criterion = nn.CrossEntropyLoss() # 交叉熵损失函数
optimizer = optim.Adam(model.parameters(), lr=0.001) # Adam优化器# 引入学习率调度器,在训练过程中动态调整学习率--训练初期使用较大的 LR 快速降低损失,训练后期使用较小的 LR 更精细地逼近全局最优解。
# 在每个 epoch 结束后,需要手动调用调度器来更新学习率,可以在训练过程中调用 scheduler.step()
scheduler = optim.lr_scheduler.ReduceLROnPlateau(optimizer, # 指定要控制的优化器(这里是Adam)mode='min', # 监测的指标是"最小化"(如损失函数)patience=3, # 如果连续3个epoch指标没有改善,才降低LRfactor=0.5 # 降低LR的比例(新LR = 旧LR × 0.5)
)
# 5. 训练模型(记录每个 iteration 的损失)
def train(model, train_loader, test_loader, criterion, optimizer, scheduler, device, epochs):model.train() # 设置为训练模式# 记录每个 iteration 的损失all_iter_losses = [] # 存储所有 batch 的损失iter_indices = [] # 存储 iteration 序号# 记录每个 epoch 的准确率和损失train_acc_history = []test_acc_history = []train_loss_history = []test_loss_history = []for epoch in range(epochs):running_loss = 0.0correct = 0total = 0for batch_idx, (data, target) in enumerate(train_loader):data, target = data.to(device), target.to(device) # 移至GPUoptimizer.zero_grad() # 梯度清零output = model(data) # 前向传播loss = criterion(output, target) # 计算损失loss.backward() # 反向传播optimizer.step() # 更新参数# 记录当前 iteration 的损失iter_loss = loss.item()all_iter_losses.append(iter_loss)iter_indices.append(epoch * len(train_loader) + batch_idx + 1)# 统计准确率和损失running_loss += iter_loss_, predicted = output.max(1)total += target.size(0)correct += predicted.eq(target).sum().item()# 每100个批次打印一次训练信息if (batch_idx + 1) % 100 == 0:print(f'Epoch: {epoch+1}/{epochs} | Batch: {batch_idx+1}/{len(train_loader)} 'f'| 单Batch损失: {iter_loss:.4f} | 累计平均损失: {running_loss/(batch_idx+1):.4f}')# 计算当前epoch的平均训练损失和准确率epoch_train_loss = running_loss / len(train_loader)epoch_train_acc = 100. * correct / totaltrain_acc_history.append(epoch_train_acc)train_loss_history.append(epoch_train_loss)# 测试阶段model.eval() # 设置为评估模式test_loss = 0correct_test = 0total_test = 0with torch.no_grad():for data, target in test_loader:data, target = data.to(device), target.to(device)output = model(data)test_loss += criterion(output, target).item()_, predicted = output.max(1)total_test += target.size(0)correct_test += predicted.eq(target).sum().item()epoch_test_loss = test_loss / len(test_loader)epoch_test_acc = 100. * correct_test / total_testtest_acc_history.append(epoch_test_acc)test_loss_history.append(epoch_test_loss)# 更新学习率调度器scheduler.step(epoch_test_loss)print(f'Epoch {epoch+1}/{epochs} 完成 | 训练准确率: {epoch_train_acc:.2f}% | 测试准确率: {epoch_test_acc:.2f}%')# 绘制所有 iteration 的损失曲线plot_iter_losses(all_iter_losses, iter_indices)# 绘制每个 epoch 的准确率和损失曲线plot_epoch_metrics(train_acc_history, test_acc_history, train_loss_history, test_loss_history)return epoch_test_acc # 返回最终测试准确率# 6. 绘制每个 iteration 的损失曲线
def plot_iter_losses(losses, indices):plt.figure(figsize=(10, 4))plt.plot(indices, losses, 'b-', alpha=0.7, label='Iteration Loss')plt.xlabel('Iteration(Batch序号)')plt.ylabel('损失值')plt.title('每个 Iteration 的训练损失')plt.legend()plt.grid(True)plt.tight_layout()plt.show()# 7. 绘制每个 epoch 的准确率和损失曲线
def plot_epoch_metrics(train_acc, test_acc, train_loss, test_loss):epochs = range(1, len(train_acc) + 1)plt.figure(figsize=(12, 4))# 绘制准确率曲线plt.subplot(1, 2, 1)plt.plot(epochs, train_acc, 'b-', label='训练准确率')plt.plot(epochs, test_acc, 'r-', label='测试准确率')plt.xlabel('Epoch')plt.ylabel('准确率 (%)')plt.title('训练和测试准确率')plt.legend()plt.grid(True)# 绘制损失曲线plt.subplot(1, 2, 2)plt.plot(epochs, train_loss, 'b-', label='训练损失')plt.plot(epochs, test_loss, 'r-', label='测试损失')plt.xlabel('Epoch')plt.ylabel('损失值')plt.title('训练和测试损失')plt.legend()plt.grid(True)plt.tight_layout()plt.show()# 8. 执行训练和测试
epochs = 50 # 增加训练轮次为了确保收敛
print("开始使用CNN训练模型...")
final_accuracy = train(model, train_loader, test_loader, criterion, optimizer, scheduler, device, epochs)
print(f"训练完成!最终测试准确率: {final_accuracy:.2f}%")# # 保存模型
# torch.save(model.state_dict(), 'cifar10_cnn_model.pth')
# print("模型已保存为: cifar10_cnn_model.pth")训练完成!最终测试准确率: 84.68%
三种可视化方法

- 特征图可视化 → 看模型 “学了啥特征”,适合研究层与层的特征变化;
- Grad-CAM → 看模型 “凭啥做判断”,给分类结果找原图依据;
- 注意力热图 → 看模型 “注意力咋分配”,优化注意力模块设计。
特征图可视化
def visualize_feature_maps(model, test_loader, device, layer_names, num_images=3, num_channels=9):"""可视化指定层的特征图(修复循环冗余问题)参数:model: 模型test_loader: 测试数据加载器layer_names: 要可视化的层名称(如['conv1', 'conv2', 'conv3'])num_images: 可视化的图像总数num_channels: 每个图像显示的通道数(取前num_channels个通道)"""model.eval() # 设置为评估模式class_names = ['飞机', '汽车', '鸟', '猫', '鹿', '狗', '青蛙', '马', '船', '卡车']# 从测试集加载器中提取指定数量的图像(避免嵌套循环)images_list, labels_list = [], []for images, labels in test_loader:images_list.append(images)labels_list.append(labels)if len(images_list) * test_loader.batch_size >= num_images:break# 拼接并截取到目标数量images = torch.cat(images_list, dim=0)[:num_images].to(device)labels = torch.cat(labels_list, dim=0)[:num_images].to(device)with torch.no_grad():# 存储各层特征图feature_maps = {}# 保存钩子句柄hooks = []# 定义钩子函数,捕获指定层的输出def hook(module, input, output, name):feature_maps[name] = output.cpu() # 保存特征图到字典# 为每个目标层注册钩子,并保存钩子句柄for name in layer_names:module = getattr(model, name)hook_handle = module.register_forward_hook(lambda m, i, o, n=name: hook(m, i, o, n))hooks.append(hook_handle)# 前向传播触发钩子_ = model(images)# 正确移除钩子for hook_handle in hooks:hook_handle.remove()# 可视化每个图像的各层特征图(仅一层循环)for img_idx in range(num_images):img = images[img_idx].cpu().permute(1, 2, 0).numpy()# 反标准化处理(恢复原始像素值)img = img * np.array([0.2023, 0.1994, 0.2010]).reshape(1, 1, 3) + np.array([0.4914, 0.4822, 0.4465]).reshape(1, 1, 3)img = np.clip(img, 0, 1) # 确保像素值在[0,1]范围内# 创建子图num_layers = len(layer_names)fig, axes = plt.subplots(1, num_layers + 1, figsize=(4 * (num_layers + 1), 4))# 显示原始图像axes[0].imshow(img)axes[0].set_title(f'原始图像\n类别: {class_names[labels[img_idx]]}')axes[0].axis('off')# 显示各层特征图for layer_idx, layer_name in enumerate(layer_names):fm = feature_maps[layer_name][img_idx] # 取第img_idx张图像的特征图fm = fm[:num_channels] # 仅取前num_channels个通道num_rows = int(np.sqrt(num_channels))num_cols = num_channels // num_rows if num_rows != 0 else 1# 创建子图网格layer_ax = axes[layer_idx + 1]layer_ax.set_title(f'{layer_name}特征图 \n')# 加个换行让文字分离上去layer_ax.axis('off') # 关闭大子图的坐标轴# 在大子图内创建小网格for ch_idx, channel in enumerate(fm):ax = layer_ax.inset_axes([ch_idx % num_cols / num_cols, (num_rows - 1 - ch_idx // num_cols) / num_rows, 1/num_cols, 1/num_rows])ax.imshow(channel.numpy(), cmap='viridis')ax.set_title(f'通道 {ch_idx + 1}')ax.axis('off')plt.tight_layout()plt.show()# 调用示例(按需修改参数)
layer_names = ['conv1', 'conv2', 'conv3']
visualize_feature_maps(model=model,test_loader=test_loader,device=device,layer_names=layer_names,num_images=1, # 可视化5张测试图像 → 输出5张大图num_channels=9 # 每张图像显示前9个通道的特征图
)
通道注意力
定义
# ===================== 新增:通道注意力模块(SE模块) =====================
class ChannelAttention(nn.Module):"""通道注意力模块(Squeeze-and-Excitation)"""def __init__(self, in_channels, reduction_ratio=16):"""参数:in_channels: 输入特征图的通道数reduction_ratio: 降维比例,用于减少参数量"""super(ChannelAttention, self).__init__()# 全局平均池化 - 将空间维度压缩为1x1,保留通道信息self.avg_pool = nn.AdaptiveAvgPool2d(1)# 全连接层 + 激活函数,用于学习通道间的依赖关系self.fc = nn.Sequential(# 降维:压缩通道数,减少计算量nn.Linear(in_channels, in_channels // reduction_ratio, bias=False),nn.ReLU(inplace=True),# 升维:恢复原始通道数nn.Linear(in_channels // reduction_ratio, in_channels, bias=False),# Sigmoid将输出值归一化到[0,1],表示通道重要性权重nn.Sigmoid())def forward(self, x):"""参数:x: 输入特征图,形状为 [batch_size, channels, height, width]返回:加权后的特征图,形状不变"""batch_size, channels, height, width = x.size()# 1. 全局平均池化:[batch_size, channels, height, width] → [batch_size, channels, 1, 1]avg_pool_output = self.avg_pool(x)# 2. 展平为一维向量:[batch_size, channels, 1, 1] → [batch_size, channels]avg_pool_output = avg_pool_output.view(batch_size, channels)# 3. 通过全连接层学习通道权重:[batch_size, channels] → [batch_size, channels]channel_weights = self.fc(avg_pool_output)# 4. 重塑为二维张量:[batch_size, channels] → [batch_size, channels, 1, 1]channel_weights = channel_weights.view(batch_size, channels, 1, 1)# 5. 将权重应用到原始特征图上(逐通道相乘)return x * channel_weights # 输出形状:[batch_size, channels, height, width]使用
class CNN(nn.Module):def __init__(self):super(CNN, self).__init__() # ---------------------- 第一个卷积块 ----------------------self.conv1 = nn.Conv2d(3, 32, 3, padding=1)self.bn1 = nn.BatchNorm2d(32)self.relu1 = nn.ReLU()# 新增:插入通道注意力模块(SE模块)self.ca1 = ChannelAttention(in_channels=32, reduction_ratio=16) self.pool1 = nn.MaxPool2d(2, 2) # ---------------------- 第二个卷积块 ----------------------self.conv2 = nn.Conv2d(32, 64, 3, padding=1)self.bn2 = nn.BatchNorm2d(64)self.relu2 = nn.ReLU()# 新增:插入通道注意力模块(SE模块)self.ca2 = ChannelAttention(in_channels=64, reduction_ratio=16) self.pool2 = nn.MaxPool2d(2) # ---------------------- 第三个卷积块 ----------------------self.conv3 = nn.Conv2d(64, 128, 3, padding=1)self.bn3 = nn.BatchNorm2d(128)self.relu3 = nn.ReLU()# 新增:插入通道注意力模块(SE模块)self.ca3 = ChannelAttention(in_channels=128, reduction_ratio=16) self.pool3 = nn.MaxPool2d(2) # ---------------------- 全连接层(分类器) ----------------------self.fc1 = nn.Linear(128 * 4 * 4, 512)self.dropout = nn.Dropout(p=0.5)self.fc2 = nn.Linear(512, 10)def forward(self, x):# ---------- 卷积块1处理 ----------x = self.conv1(x) x = self.bn1(x) x = self.relu1(x) x = self.ca1(x) # 应用通道注意力x = self.pool1(x) # ---------- 卷积块2处理 ----------x = self.conv2(x) x = self.bn2(x) x = self.relu2(x) x = self.ca2(x) # 应用通道注意力x = self.pool2(x) # ---------- 卷积块3处理 ----------x = self.conv3(x) x = self.bn3(x) x = self.relu3(x) x = self.ca3(x) # 应用通道注意力x = self.pool3(x) # ---------- 展平与全连接层 ----------x = x.view(-1, 128 * 4 * 4) x = self.fc1(x) x = self.relu3(x) x = self.dropout(x) x = self.fc2(x) return x # 重新初始化模型,包含通道注意力模块
model = CNN()
model = model.to(device) # 将模型移至GPU(如果可用)criterion = nn.CrossEntropyLoss() # 交叉熵损失函数
optimizer = optim.Adam(model.parameters(), lr=0.001) # Adam优化器# 引入学习率调度器,在训练过程中动态调整学习率--训练初期使用较大的 LR 快速降低损失,训练后期使用较小的 LR 更精细地逼近全局最优解。
# 在每个 epoch 结束后,需要手动调用调度器来更新学习率,可以在训练过程中调用 scheduler.step()
scheduler = optim.lr_scheduler.ReduceLROnPlateau(optimizer, # 指定要控制的优化器(这里是Adam)mode='min', # 监测的指标是"最小化"(如损失函数)patience=3, # 如果连续3个epoch指标没有改善,才降低LRfactor=0.5 # 降低LR的比例(新LR = 旧LR × 0.5)
)# ===================== 新增:通道注意力模块(SE模块) =====================
class ChannelAttention(nn.Module):"""通道注意力模块(Squeeze-and-Excitation)"""def __init__(self, in_channels, reduction_ratio=16):"""参数:in_channels: 输入特征图的通道数reduction_ratio: 降维比例,用于减少参数量"""super(ChannelAttention, self).__init__()# 全局平均池化 - 将空间维度压缩为1x1,保留通道信息self.avg_pool = nn.AdaptiveAvgPool2d(1)# 全连接层 + 激活函数,用于学习通道间的依赖关系self.fc = nn.Sequential(# 降维:压缩通道数,减少计算量nn.Linear(in_channels, in_channels // reduction_ratio, bias=False),nn.ReLU(inplace=True),# 升维:恢复原始通道数nn.Linear(in_channels // reduction_ratio, in_channels, bias=False),# Sigmoid将输出值归一化到[0,1],表示通道重要性权重nn.Sigmoid())def forward(self, x):"""参数:x: 输入特征图,形状为 [batch_size, channels, height, width]返回:加权后的特征图,形状不变"""batch_size, channels, height, width = x.size()# 1. 全局平均池化:[batch_size, channels, height, width] → [batch_size, channels, 1, 1]avg_pool_output = self.avg_pool(x)# 2. 展平为一维向量:[batch_size, channels, 1, 1] → [batch_size, channels]avg_pool_output = avg_pool_output.view(batch_size, channels)# 3. 通过全连接层学习通道权重:[batch_size, channels] → [batch_size, channels]channel_weights = self.fc(avg_pool_output)# 4. 重塑为二维张量:[batch_size, channels] → [batch_size, channels, 1, 1]channel_weights = channel_weights.view(batch_size, channels, 1, 1)# 5. 将权重应用到原始特征图上(逐通道相乘)return x * channel_weights # 输出形状:[batch_size, channels, height, width]# 训练模型(复用原有的train函数)
print("开始训练带通道注意力的CNN模型...")
final_accuracy = train(model, train_loader, test_loader, criterion, optimizer, scheduler, device, epochs=50)
print(f"训练完成!最终测试准确率: {final_accuracy:.2f}%")训练完成!最终测试准确率: 85.38%
在同样50个epoch后精度略有提升
我们关注的不只是精度的差异,还包含了同精度下训练时长的差异等,在大规模数据集上推理时长、训练时长都非常重要。因为资源是有限的。
注意力热力图
# 可视化空间注意力热力图(显示模型关注的图像区域)
def visualize_attention_map(model, test_loader, device, class_names, num_samples=3):"""可视化模型的注意力热力图,展示模型关注的图像区域"""model.eval() # 设置为评估模式with torch.no_grad():for i, (images, labels) in enumerate(test_loader):if i >= num_samples: # 只可视化前几个样本breakimages, labels = images.to(device), labels.to(device)# 创建一个钩子,捕获中间特征图activation_maps = []def hook(module, input, output):activation_maps.append(output.cpu())# 为最后一个卷积层注册钩子(获取特征图)hook_handle = model.conv3.register_forward_hook(hook)# 前向传播,触发钩子outputs = model(images)# 移除钩子hook_handle.remove()# 获取预测结果_, predicted = torch.max(outputs, 1)# 获取原始图像img = images[0].cpu().permute(1, 2, 0).numpy()# 反标准化处理img = img * np.array([0.2023, 0.1994, 0.2010]).reshape(1, 1, 3) + np.array([0.4914, 0.4822, 0.4465]).reshape(1, 1, 3)img = np.clip(img, 0, 1)# 获取激活图(最后一个卷积层的输出)feature_map = activation_maps[0][0].cpu() # 取第一个样本# 计算通道注意力权重(使用SE模块的全局平均池化)channel_weights = torch.mean(feature_map, dim=(1, 2)) # [C]# 按权重对通道排序sorted_indices = torch.argsort(channel_weights, descending=True)# 创建子图fig, axes = plt.subplots(1, 4, figsize=(16, 4))# 显示原始图像axes[0].imshow(img)axes[0].set_title(f'原始图像\n真实: {class_names[labels[0]]}\n预测: {class_names[predicted[0]]}')axes[0].axis('off')# 显示前3个最活跃通道的热力图for j in range(3):channel_idx = sorted_indices[j]# 获取对应通道的特征图channel_map = feature_map[channel_idx].numpy()# 归一化到[0,1]channel_map = (channel_map - channel_map.min()) / (channel_map.max() - channel_map.min() + 1e-8)# 调整热力图大小以匹配原始图像from scipy.ndimage import zoomheatmap = zoom(channel_map, (32/feature_map.shape[1], 32/feature_map.shape[2]))# 显示热力图axes[j+1].imshow(img)axes[j+1].imshow(heatmap, alpha=0.5, cmap='jet')axes[j+1].set_title(f'注意力热力图 - 通道 {channel_idx}')axes[j+1].axis('off')plt.tight_layout()plt.show()# 调用可视化函数
visualize_attention_map(model, test_loader, device, class_names, num_samples=1)
相关文章:
Python打卡第46天
浙大疏锦行 注意力 注意力机制是一种让模型学会「选择性关注重要信息」的特征提取器,就像人类视觉会自动忽略背景,聚焦于图片中的主体(如猫、汽车)。 从数学角度看,注意力机制是对输入特征进行加权求和,…...
Unity优化篇之DrawCall
当然可以!以下是完整、详尽、可发布的博客文章,专注讲解 Unity 的静态合批与动态合批机制,并详细列出它们对 Shader 的要求和所有限制条件。文章结构清晰、技术深度足够,适合发布在 CSDN、掘金、知乎等技术平台。 urp默认隐藏动态…...
SpringCloud学习笔记-2
说明:来源于网络,如有侵权请联系我删除 1.提问:如果注册中心宕机,远程调用还能成功吗 答:当微服务发起请求时,会向注册中心请求所有的微服务地址,然后在向指定的微服务地址发起请求。在设计实…...
复习(Review))
C++.OpenGL (9/64)复习(Review)
复习(Review) 核心概念快速回顾 #mermaid-svg-MMSQf7gXQlHqiqfM {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-MMSQf7gXQlHqiqfM .error-icon{fill:#552222;}#mermaid-svg-MMSQf7gXQlHqiqfM .error-text{fill:#…...
)
Spring Boot-面试题(52)
摘要: 1、通俗易懂,适合小白 2、仅做面试复习用,部分来源网络,博文免费,知识无价,侵权请联系! 1. 什么是 Spring Boot 框架? Spring Boot 是基于 Spring 框架的快速开发框架&#…...

从混乱到秩序:探索管理系统如何彻底改变工作流程
内容摘要 在许多企业与组织中,工作流程混乱是阻碍发展的“绊脚石”。员工们常常被繁琐的步骤、模糊的职责和沟通不畅等问题搞得焦头烂额,工作效率低下,错误频发。而与之形成鲜明对比的是,一些引入了先进管理系统的团队࿰…...
最新研究揭示云端大语言模型防护机制的成效与缺陷
一项全面新研究揭露了主流云端大语言模型(LLM)平台安全机制存在重大漏洞与不一致性,对当前人工智能安全基础设施现状敲响警钟。该研究评估了三大领先生成式AI平台的内容过滤和提示注入防御效果,揭示了安全措施在阻止有害内容生成与…...
HTML5+CSS3+JS小实例:具有粘性重力的磨砂玻璃导航栏
实例:具有粘性重力的磨砂玻璃导航栏 技术栈:HTML+CSS+JS 效果: 源码: 【HTML】 <!DOCTYPE html> <html lang="zh-CN"><head><meta charset="UTF-8"><meta name="viewport" content="width=device-width…...

CVAT标注服务
CVAT 是一个交互式的视频和图像标注工具,适用于计算机视觉,是一个典型的现代Web应用架构,可以实现大部分情况的标注工作,可以通过serveless CVAT-github cvat文档 下面将就其配置介绍一下几个服务: 1. 核心服务 (C…...
)
SpringBoot+Mybatisplus配置多数据源(超级简单!!!!)
今天分享配置多数据源的另外一种方式,SpringBoMybatisplus配置多数据源,此种方式配置相对简单,都是苞米豆封装好的,配置容易;此篇分享比较简单的方式配置数据源,多个固定的数据源,通过注解选择使…...

Git Svn
github一般需要科学上网,通过SourceTree通过URL克隆,会提示无效URL或者SLL Timeout之类,如果电脑开启了VPN,在系统设置-网络-DNS查看代理端口,如:127.0.0.1:7890 手动配置git代理 git config --global ht…...
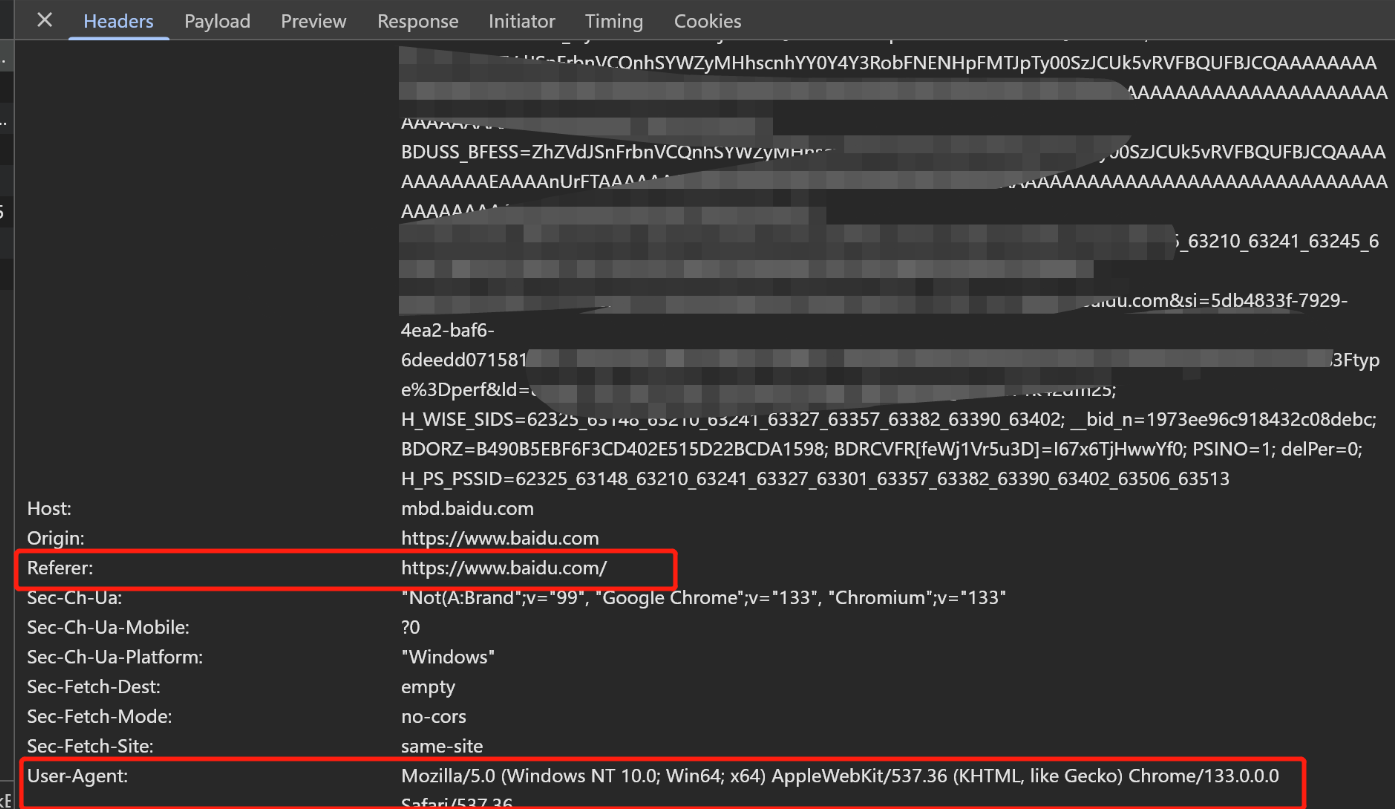
Python爬虫伪装
一、网站防爬机制概述 在当今互联网环境中,具有一定规模或盈利性质的网站几乎都实施了各种防爬措施。这些措施主要分为两大类: 身份验证机制:直接将未经授权的爬虫阻挡在外反爬技术体系:通过各种技术手段增加爬虫获取数据的难度…...

Webpack的基本使用 - babel
Mode配置 Mode配置选项可以告知Webpack使用相应模式的内置优化 默认值是production(什么都不设置的情况下) 可选值有:none | development | production; 这几个选项有什么区别呢? 认识source-map 我们的代码通常运行在浏览器…...

LLaMA-Factory的5种推理方式总结
LLaMA-Factory 作为一款开源的大语言模型微调与推理框架,提供了 5 种核心推理方式,覆盖从本地调试到生产部署的全流程需求。以下是具体方式及示例: 1. 交互式命令行推理 适用场景:快速测试模型效果或进行简单对话。 示例命令&am…...

链游技术破壁:NFT资产确权与Play-to-Earn经济模型实战
链游技术破壁:NFT资产确权与Play-to-Earn经济模型实战 ——从「投机泡沫」到「可持续生态」的技术重构 一、NFT确权技术革新:从链上存证到动态赋权 跨链确权架构 全链互操作协议:采用LayerZero协议实现以太坊装备与Solana土地的跨链组合&…...
为什么HDI叠孔比错孔设计难生产
摘要:本文深入探讨了HDI(高密度互连)技术中叠孔与错孔设计在生产难度上的差异。通过对两种设计在对位精度、制程复杂性、可靠性挑战等方面进行详细分析,阐述了叠孔设计在生产过程中面临的一系列难题,旨在为HDI产品的设…...
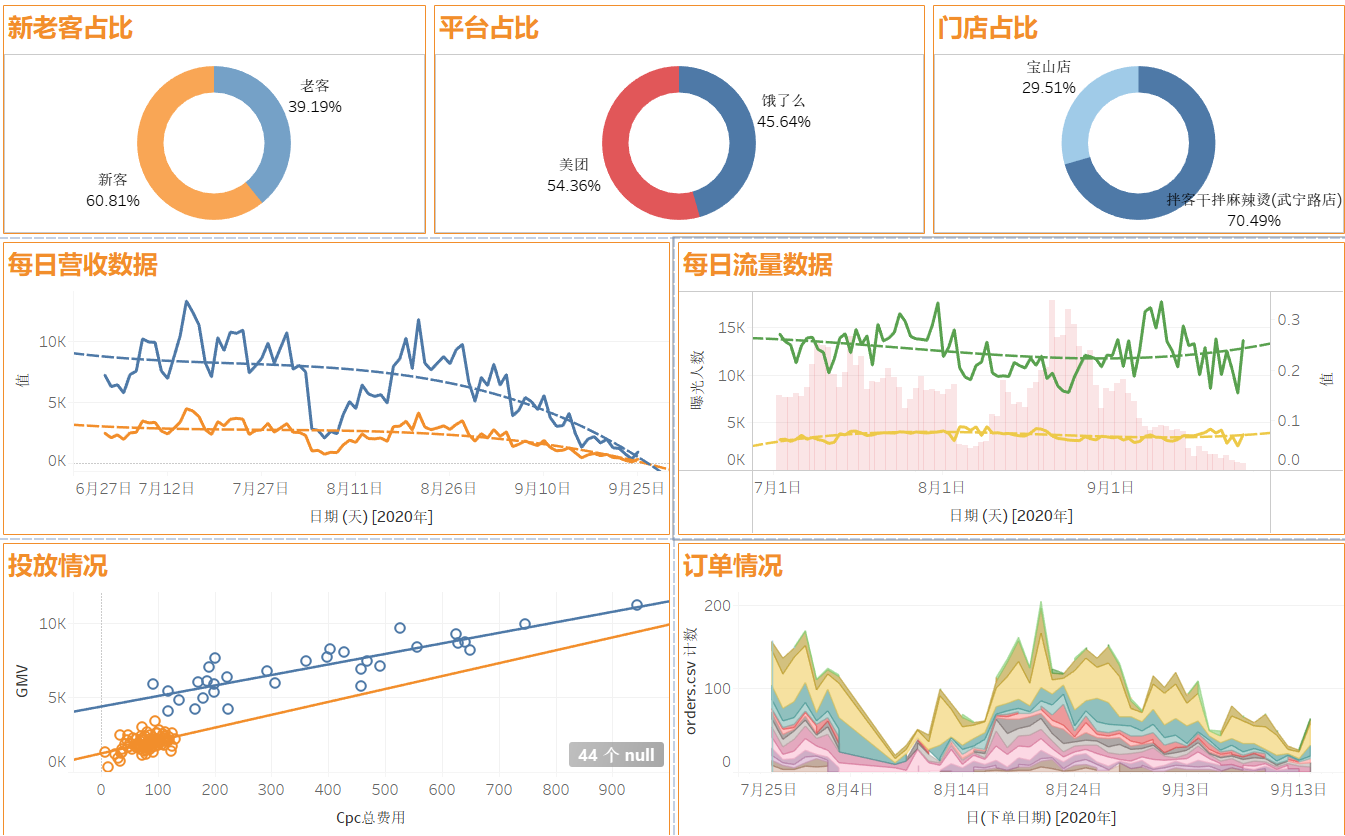
数据分析实战2(Tableau)
1、Tableau功能 数据赋能(让业务一线也可以轻松使用最新数据) 分析师可以直接将数据看板发布到线上自动更新看板自由下载数据线上修改图表邮箱发送数据设置数据预警 数据探索(通过统计分析和数据可视化,从数据发现问题…...
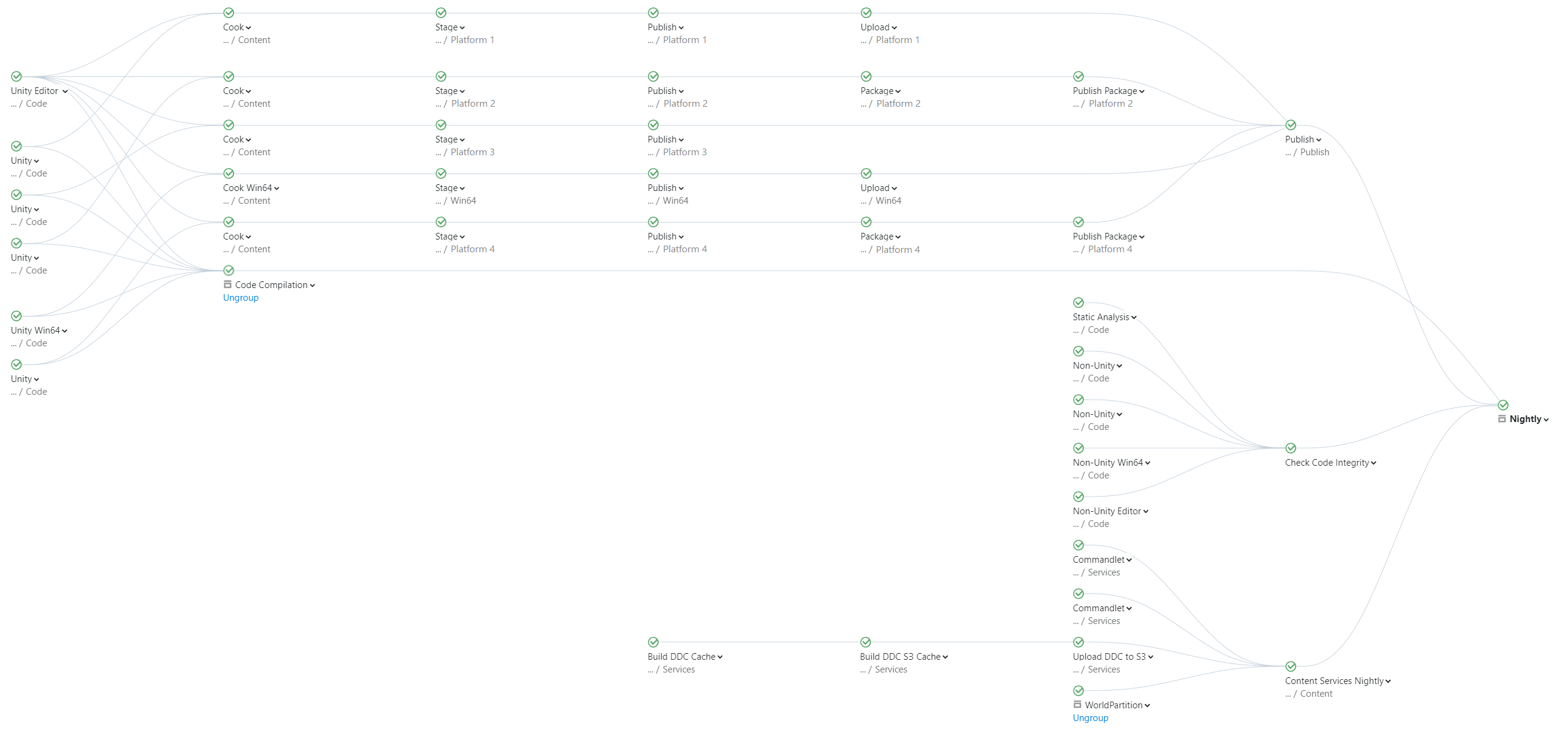
游戏开发中的CI/CD优化案例:知名游戏公司Gearbox使用TeamCity简化CI/CD流程
案例背景 关于Gearbox: Gearbox 是一家美国电子游戏公司,总部位于德克萨斯州弗里斯科,靠近达拉斯。Gearbox 成立于1999年,推出过多款史上最具代表性的视频游戏,包括《半衰期》、《战火兄弟连》以及《无主之地》。 团队…...
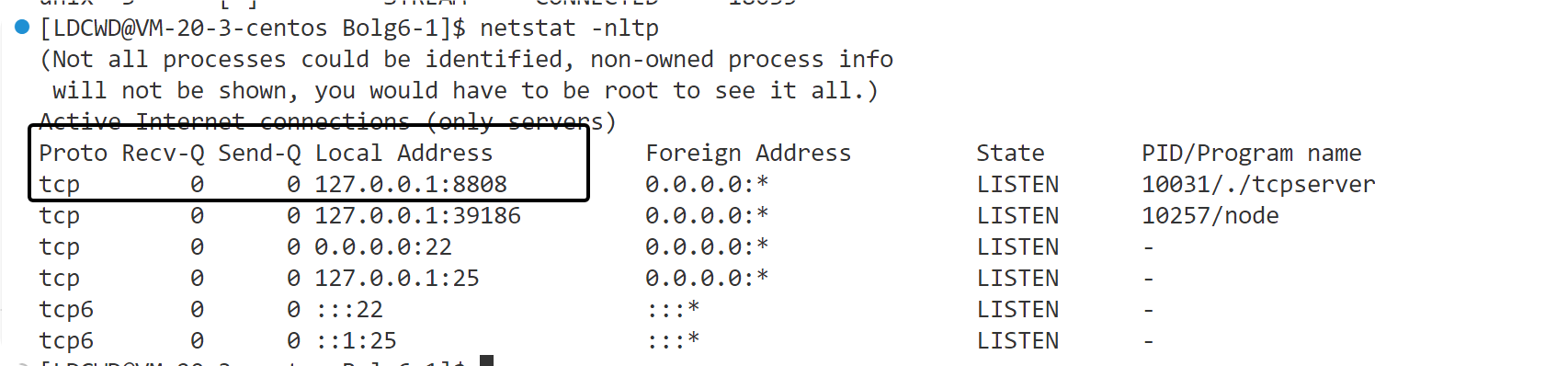
Linux --TCP协议实现简单的网络通信(中英翻译)
一、什么是TCP协议 1.1 、TCP是传输层的协议,TCP需要连接,TCP是一种可靠性传输协议,TCP是面向字节流的传输协议; 二、TCPserver端的搭建 2.1、我们最终好实现的效果是 客户端在任何时候都能连接到服务端,然后向服务…...
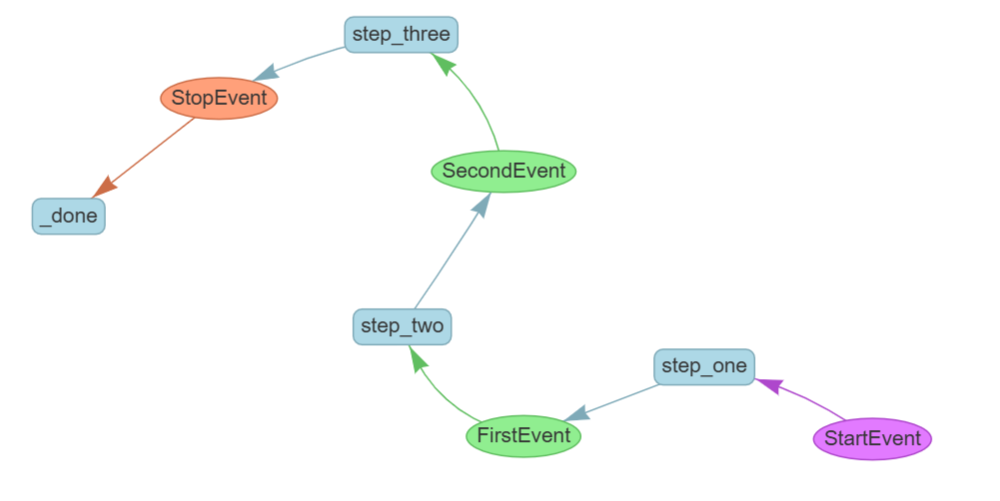
LlamaIndex 工作流简介以及基础工作流
什么是工作流? 工作流是一种由事件驱动、基于步骤的应用程序执行流程控制方式。 你的应用程序被划分为多个称为“步骤(Steps)”的部分,这些步骤由“事件(Events)”触发,并且它们自身也会发出事…...

如何利用Elastic Stack(ELK)进行安全日志分析
在以下文章中,我将解释如何使用Elastic Stack(ELK)进行安全日志分析,以提高安全性和监控网络活动。ELK是一个功能强大的开源日志管理和分析平台,由Elasticsearch、Logstash和Kibana组成,适用于各种用例&…...

创客匠人:以 AI 利器赋能创始人 IP 打造,加速知识变现新路径
在知识付费与个人 IP 崛起的时代,创客匠人作为行业领先的技术服务商,正通过 AI 工具重构创始人 IP 打造与知识变现的生态。其推出的三大 AI 利器 ——AI 销售信、免训数字人、AI 智能客服,精准解决 IP 运营中的核心痛点。 以 AI 销售信为例&…...

Opencv中的copyto函数
一.OpenCV中copyto函数详解 copyto()是 OpenCV 中用于图像复制和融合的核心函数,支持灵活的数据复制和掩模(Mask)操作,其功能和使用方法如下: 1. 核心功能 基础复制:将源图像&…...
)
TeamCity Agent 配置完整教程(配合 Docker Compose 快速部署)
在《使用 Docker Compose 从零部署 TeamCity PostgreSQL(详细新手教程)》中,我们成功部署了 TeamCity Server 和数据库服务。但要真正运行构建任务,还需要至少一个 Build Agent(构建代理)。 本教程将继续…...

基于深度强化学习的Scrapy-Redis分布式爬虫动态调度策略研究
在大数据时代,网络数据的采集与分析变得至关重要,分布式爬虫作为高效获取海量数据的工具,被广泛应用于各类场景。然而,传统的爬虫调度策略在面对复杂多变的网络环境和动态的抓取需求时,往往存在效率低下、资源浪费等问…...

在 Ubuntu 24.04 LTS 上安装 Jenkins 并配置全局工具(Git、JDK、Maven)
在 Ubuntu 24.04 LTS 上安装 Jenkins 并配置全局工具(Git、JDK、Maven) Jenkins 是一款开源的持续集成和持续交付(CI/CD)工具,在 DevOps 实践中有着广泛的应用。本文将手把手带你在 Ubuntu 24.04 LTS 系统中完成 Jenkins 的安装,并配置所需的全局工具:Git、JDK 和 Maven…...

Tika Server:企业级文档内容解析的轻量级服务化方案
目录 Tika Server:企业级文档内容解析的轻量级服务化方案 一、什么是 Tika Server? 二、Tika Server 的功能特点 1. 多种文档格式支持 2. 提取结构化信息 3. RESTful 接口设计 三、是否开源?是否支持私有化部署? 四、部署…...

LMG1020YFFR 电子元器件详解
LMG1020YFFR 电子元器件详解 基本概述 LMG1020YFFR是德州仪器(TI)生产的一款高性能、低侧栅极驱动器,属于其GaN(氮化镓)功率器件驱动产品系列。 主要功能特性 驱动能力: 峰值输出电流:5A/-5A 可驱动GaN FETs、SiC MOSFETs和高速硅MOSFETs…...
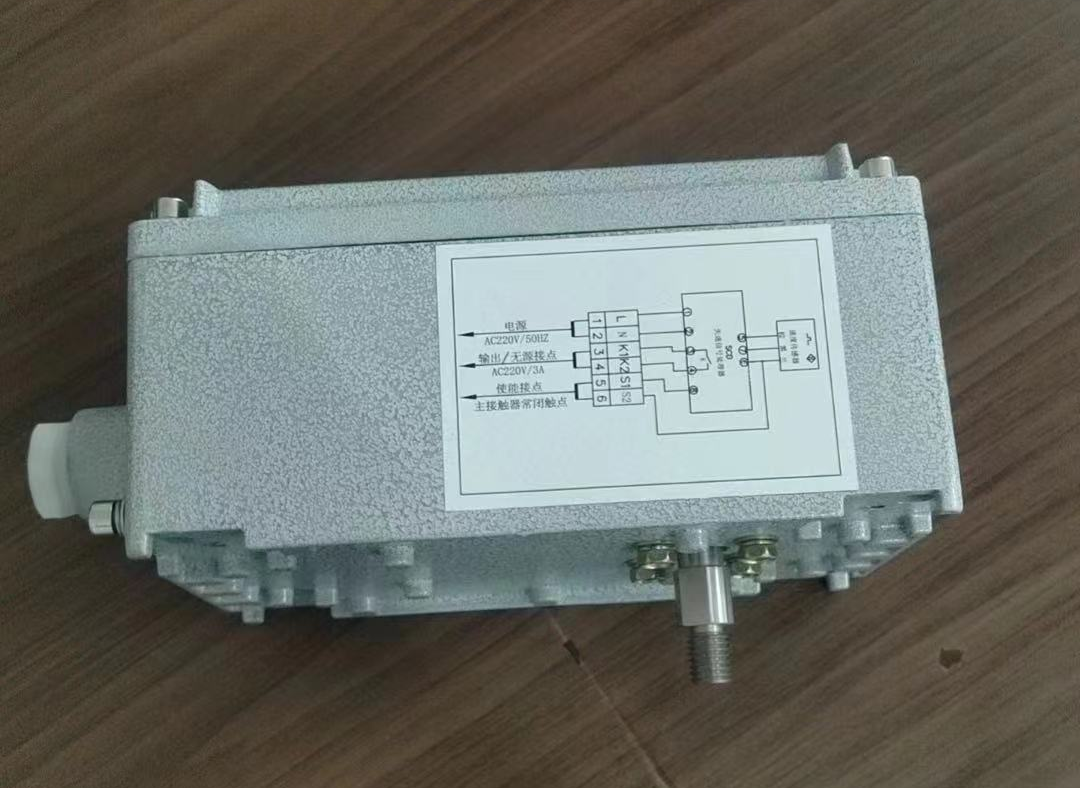
防爆型断链保护器的应用场景有哪些?
防爆型断链保护器是一种用于防止链条断裂导致设备损坏或安全事故的装置,尤其适用于存在爆炸风险的工业环境。以下是其主要应用场景: 1.石油化工行业 在石油化工厂、炼油厂等场所,防爆型断链保护器可用于保护输送设备…...

leetcode_206 反转链表
1. 题意 原地反转链表,非常经典的一道题。 2. 解决 2.1 非递归 非递归的比较好理解;链表需要维护前驱和后继两个信息,当我们要更改后继时,先要把原来的后继先存起来。 /*** Definition for singly-linked list.* struct List…...