[RDK X5] MJPG编解码开发实战:从官方API到OpenWanderary库的C++/Python实现
业余时间一直在基于RDK X5搞一些小研究,需要基于高分辨率图像检测目标。实际落地时,在图像采集上遇到了个大坑。首先,考虑到可行性,我挑选了一个性价比最高的百元内摄像头,已确定可以在X5上使用,接下来就开始一系列的痛苦适配流程😭。
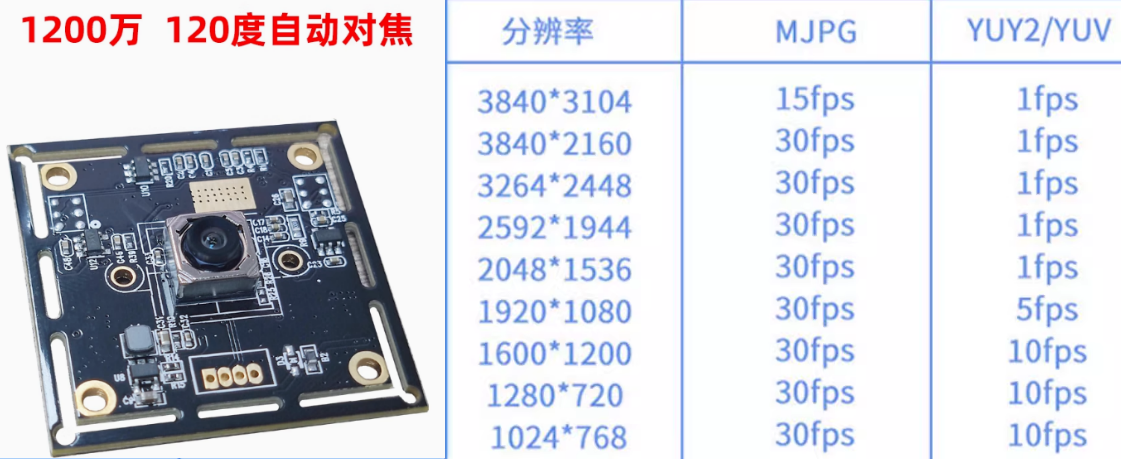
检测算法能够应用的前提是摄像头采集与实际时间不能相差过多,如果使用下面这种通用的采集方式的话,延迟在3-7s,且每秒最多显示1帧。
import cv2
cap = cv2.VideoCapture(0)
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 3264)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 2448)cv2.namedWindow('frame', cv2.WINDOW_NORMAL)
while True:ret, img = self.cap.read()if not ret:print("Failed to capture image from camera")returnimg = cv2.resize(img , (3264 // 4, 2448 //4))cv2.imshow('frame', img)if cv2.waitKey(1) & 0xFF == ord('q'):break
cap.release()
如果是这样的话,那就别想着算法落地了,完全没法用。利用了我5个月的闲暇时间(唉,工作巨忙,抽出时间真的太难了),终于把问题和对应解决方案都给摸了,最终结论如下:800M分辨率下,延迟200ms,FPS在20-30之间,已经达到可用的标准。
本文将带给各位如下内容:
- 编解码问题剖析
- 官方PyAPI的编解码示例
- OpenWanderary编解码示例(个人维护库)
一 采集问题剖析
- 为什么每秒只能采集1帧?
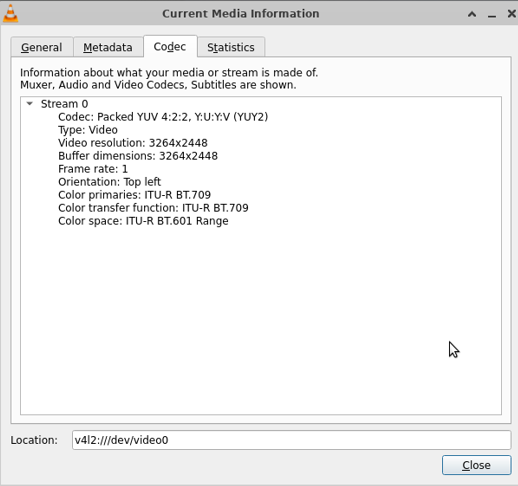
cap = cv2.VideoCapture(0)的默认采集模式为CAP_ANY,用VLC工具(sudo apt-get install vlc)打开摄像头查看默认配置。发现默认是YUV模式,根据摄像头文档,YUV模式就是每秒只能播一帧。
- 如果只是采集1帧的话,为什么采集延迟在3-7s? 参考下面代码获取
CAP_PROP_BUFFERSIZE的参数,返回值为4。这个参数表示会自动存储最新的4帧图像,如果我们无法及时在1s内处理完数据,很容易读取到缓存图像,即4s前的数据。

参考上述分析出的问题,我们可以将采集代码改为如下形式,这样我们就可以获得稍微快速的效果
import cv2
# 切换为V4L2模式,该模式下将利用linux的v4l2工具完成图像采集
cap = cv2.VideoCapture(0, cv2.CAP_V4L2)
# 切换为MJPG模式采集图像,该模式下摄像头FPS为30FPS。
cap.set(cv2.CAP_PROP_FOURCC, cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'))
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 3264)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 2448)
cap.set(cv2.CAP_PROP_BUFFERSIZE, 1) # 保留1帧缓存,不需要读取旧图像# 后面采集方式跟之前一样
cv2.namedWindow('frame', cv2.WINDOW_NORMAL)
while True:ret, img = self.cap.read()if not ret:print("Failed to capture image from camera")returnimg = cv2.resize(img , (3264 // 4, 2448 //4))cv2.imshow('frame', img)if cv2.waitKey(1) & 0xFF == ord('q'):break
cap.release()
优化之后,每秒大概可处理3-5帧左右图像,延迟在0.5-1s之间。

二 利用官方Py接口实现硬件编解码
硬件编解码指利用X5的专用编解码芯片来处理图像的编解码操作。相比纯软件实现,硬件编解码能显著提高处理速度。为了搞通编解码,我还定位出官方Py包的一个Bug(快说谢谢小玺玺😋)。
2.1 解码MJPG图像
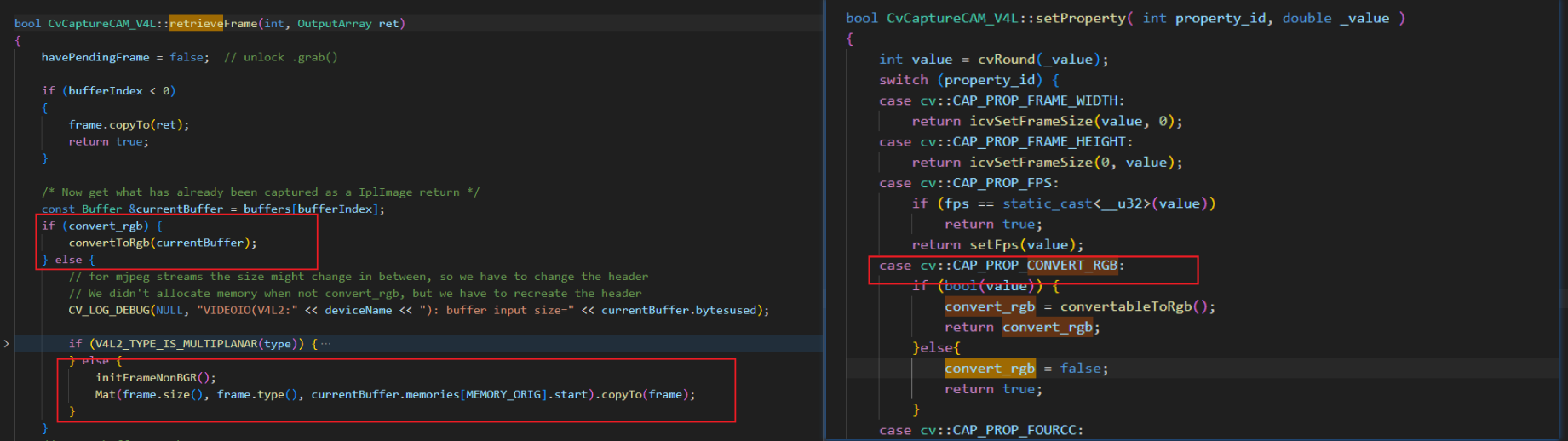
如果需要使用硬件编解码,就必须得想办法暴露出原始的MJPG流,通过翻OpenCV源码,只有将convert_rgb这个变量置为false,才能返回mjpg数据,那么问题简单了,调用cap.set(cv2.CAP_PROP_CONVERT_RGB, 0)即可完成设置。
官方的解码库导入方式为from hobot_vio.libsrcampy import Decoder,具体用法如下:
- 初始化编码类:
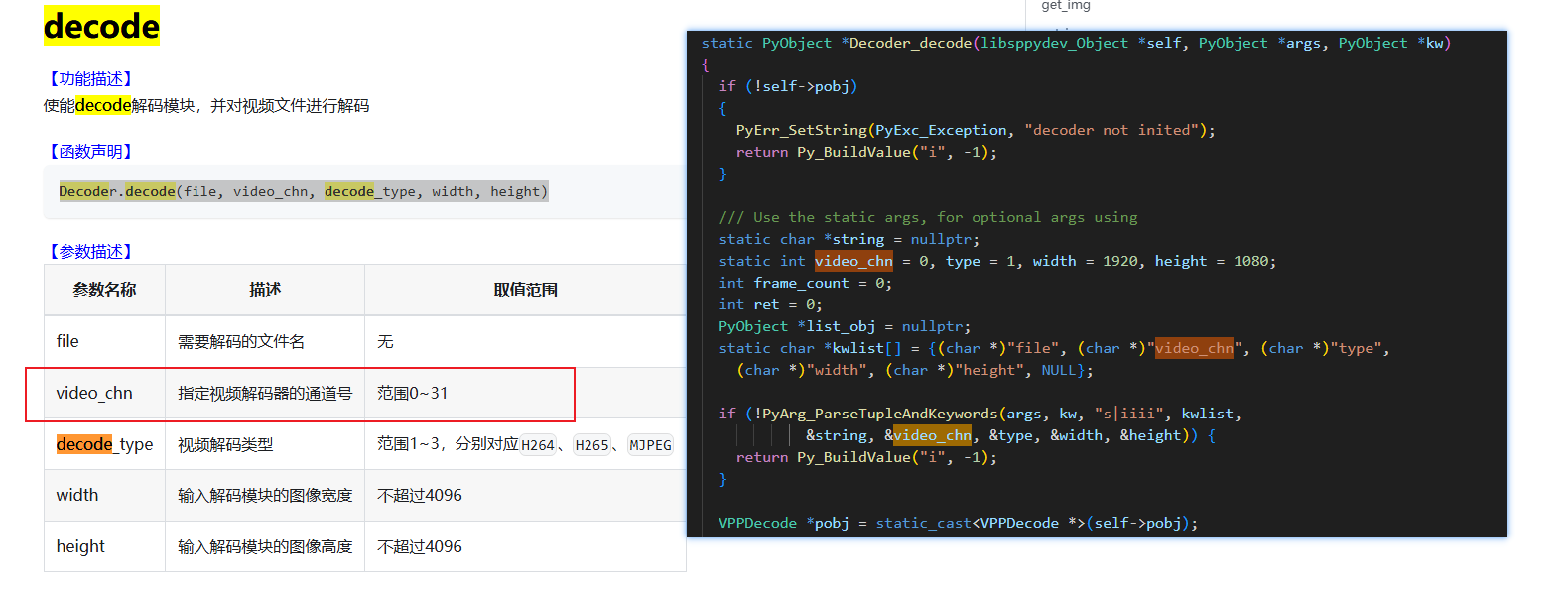
dec = Decoder() - 定义解码器参数:
ret = dec.decode("", 0, 3, imgw, imgh)。- 第一个参数为
file:表示解码数据来源,这里是通过视频流传入解码数据,因此这里指定为""即可。 - 第二个参数为
video_chn:官方说指定解码器的通道号,但从源码来看,这个参数完全没用到,填什么都可以。 - 第三个参数为
decode_type:1表示H264,2表示H265,3表示MJPEG,这里摄像头是MJPG流,因此这里填3 - 第四/五个参数就是图像的Size。
- 第一个参数为
- 向编码器中传入编码数据:
dec.set_img(byte_data) - 获取解码数据:
decode_img_x5 = dec.get_img()
更详细的代码用法如下
import cv2
from hobot_vio import libsrcampy
import numpy as npcap = cv2.VideoCapture(0, cv2.CAP_V4L2)
cap.set(cv2.CAP_PROP_FOURCC, cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'))
imgh, imgw = 2448, 3264
cap.set(cv2.CAP_PROP_FRAME_WIDTH, imgw)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, imgh)
cap.set(cv2.CAP_PROP_BUFFERSIZE, 1)
# 返回MJPG数据
cap.set(cv2.CAP_PROP_CONVERT_RGB, 0)# 设置RDKX5的解码器
dec = libsrcampy.Decoder()
ret = dec.decode("", 0, 3, imgw, imgh)cv2.namedWindow('frame', cv2.WINDOW_NORMAL)
while True:data = cap.grab()if not data:continue# 这里frame返回的是MJPG数据ret, frame = cap.retrieve()if not ret:continue# 将编码数据传入解码器byte_data = frame.tobytes()dec.set_img(byte_data)decode_img_x5 = dec.get_img()decode_img_x5 = cv2.cvtColor(np.frombuffer(decode_img_x5, dtype=np.uint8).reshape(imgh * 3 // 2, imgw), cv2.COLOR_YUV2BGR_NV12)decode_img = cv2.resize(decode_img_x5, (imgw// 4, imgh//4))cv2.imshow('frame', decode_img)if cv2.waitKey(1) & 0xFF == ord('q'):break
cap.release()
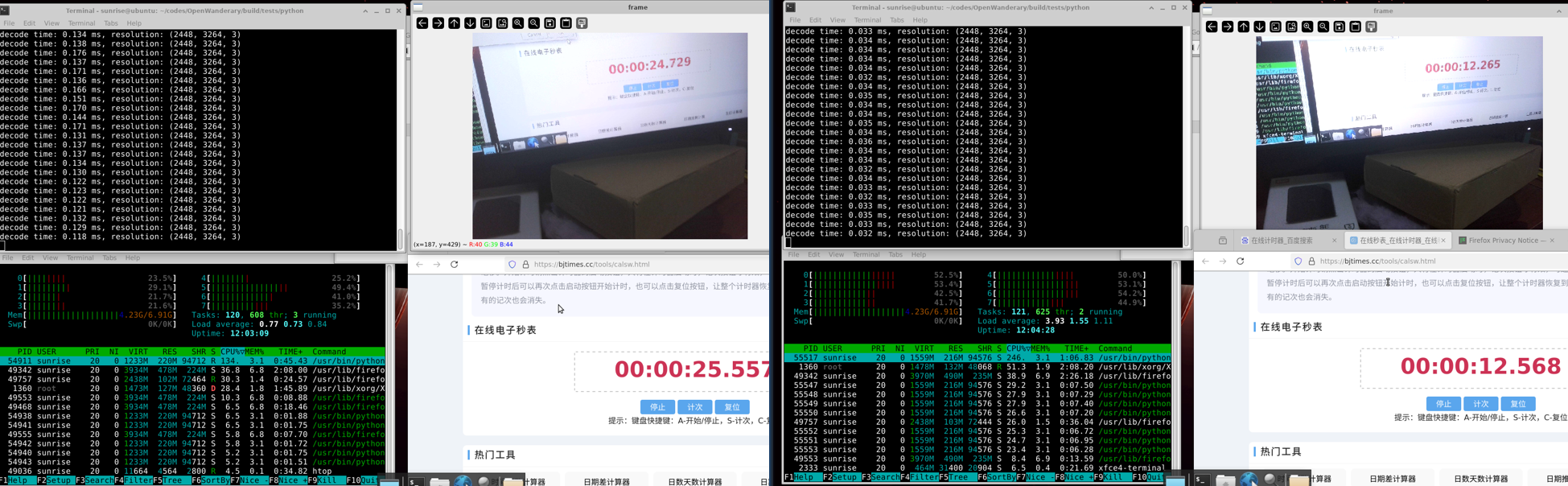
软硬编解码测试结果如下,硬解码CPU占用多了1倍,但效率优化了4倍左右。
- OpenCV软解码:平均解码耗时在140ms左右,CPU占用为134%。
- RDKX3硬解码:平均解码耗时在34ms左右,CPU占用为246%。
2.2 编码图像为MJPG数据
这里介绍下有编码需求的场景,摄像头采集完图像,利用BPU推理之后,一般会将检测结果绘制到图像上,部分开发这需要利用Flask(Python 编写的轻量级 Web 应用框架)将图像传到网页端进行查看,这时候对原图进行编码传输会提高传输效率,提高可视化的丝滑度。
这里直接给出对应的编码示例,软解码调用data = cv2.imencode(".jpg", img),测试图像分辨率为1280x720。具体测试结论如下:
- 软编码:耗时
18ms,编码后字节数123662。 - 硬编码:耗时
3ms,编码后字节数53496。
imgpath = "zidane.jpg"
img = cv2.imread(imgpath)
imgh, imgw, chl = img.shape# 设置编码,参数意义同Decoder
enc = libsrcampy.Encoder()
ret = enc.encode(0, 3, imgw, imgh)
nv12 = bgr2nv12_opencv(img) # 编码输入要求为nv12格式
enc.encode_file(nv12.tobytes()) # 传入需编码的数据
enc_data = enc.get_img() # 返回编码后的字节
buf = np.frombuffer(enc_data, dtype=np.uint8)
dec_img = cv2.imdecode(buf, cv2.IMREAD_COLOR)
print(dec_img.shape)
enc.close()
三 利用OpenWanderary实现Py和C++的编解码
OpenWanderary在23年就已经开始启动了,最开始是在[BPU部署教程] 万字长文!通透解读模型部署端到端大流程中初步介绍了一些功能。主要是针对X3/X5的一些功能进行二次封装,并补充一些轮子库(工作真的是越来越忙,能抽出时间搞这种东西真的就是纯热爱了 💞 )。仓库地址:https://github.com/Li-Zhaoxi/OpenWanderary
为什么我要重新封装,从官方开源的代码和文档里来看,不同的开发板对应的文档是不同的。甚至代码都是完全复制一份来适配的,那么后续有更新,或者有bug修复,真的很不适合持续的发版与迭代。自己开发时候遇到很多问题,比如这个摄像头问题,定位了好久。我个人不喜欢走回头路,比如一个编解码问题只是个接口,内部应该适配多个开发板。不需要用户去区分这些。
X5的开发板,底层是有个hbm的C语言接口,这个接口是稳定的。无论是官方SDK还是我维护的OpenWanderary,都是基于这个底层的API派生而来。
然后说说自己设计OpenWanderary的几个优点吧:
- 每个关键函数都有UnitTest测试,而且是数值一致性级别的。
- 代码规范符合Google开发规范,并有pre-commit功能完成基本的规范性校验。
- Py接口利用PyBind对现有的C++进行封装,也同时有相关的UnitTest完成测试。
OpenWanderary目前处于持续开发中,迭代过程中部分函数接口会有一些变化,但会始终保持UnitTest的通过。
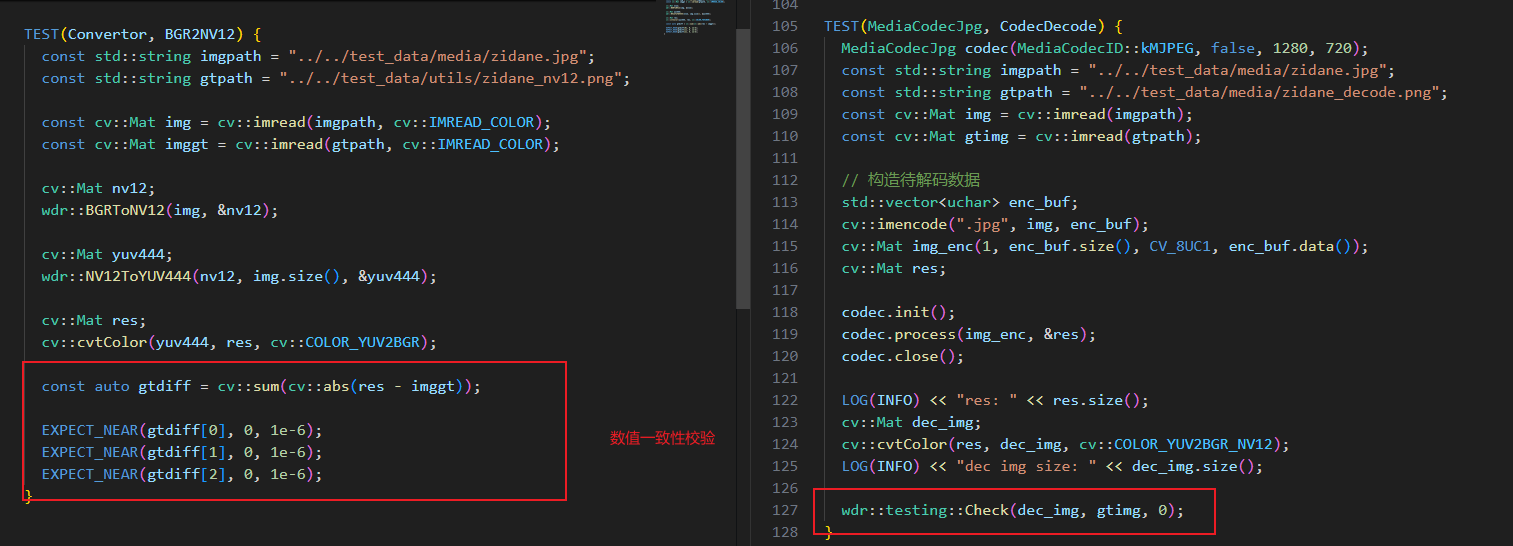
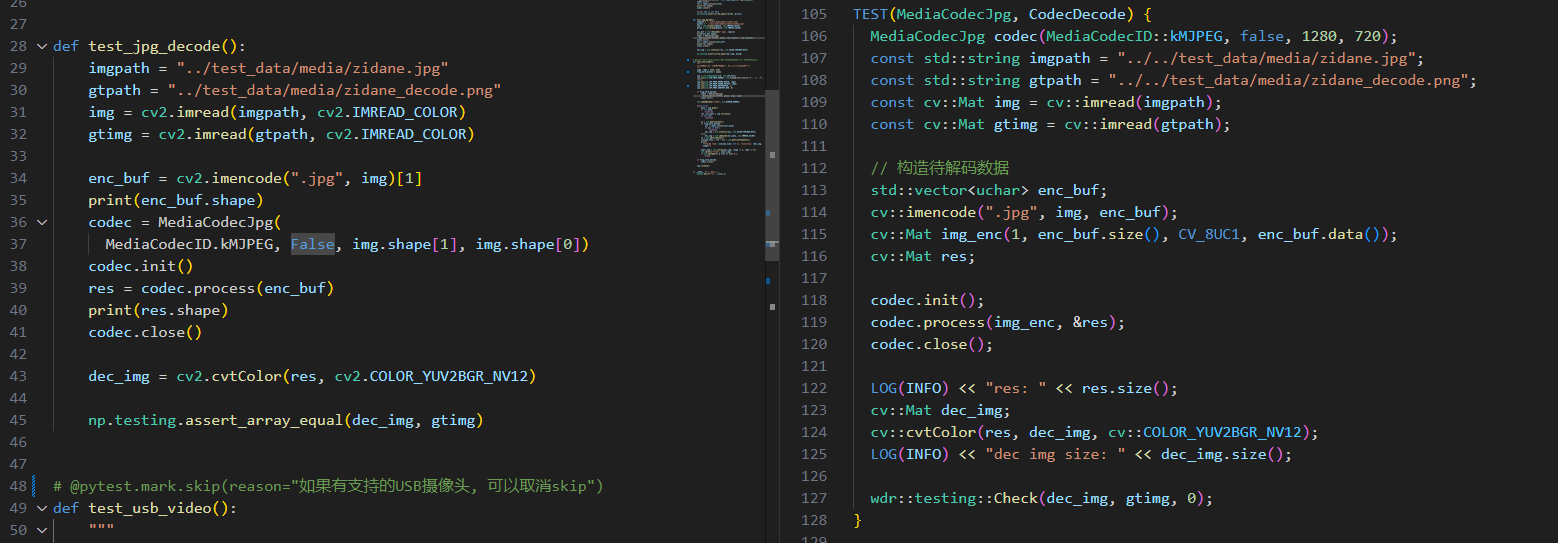
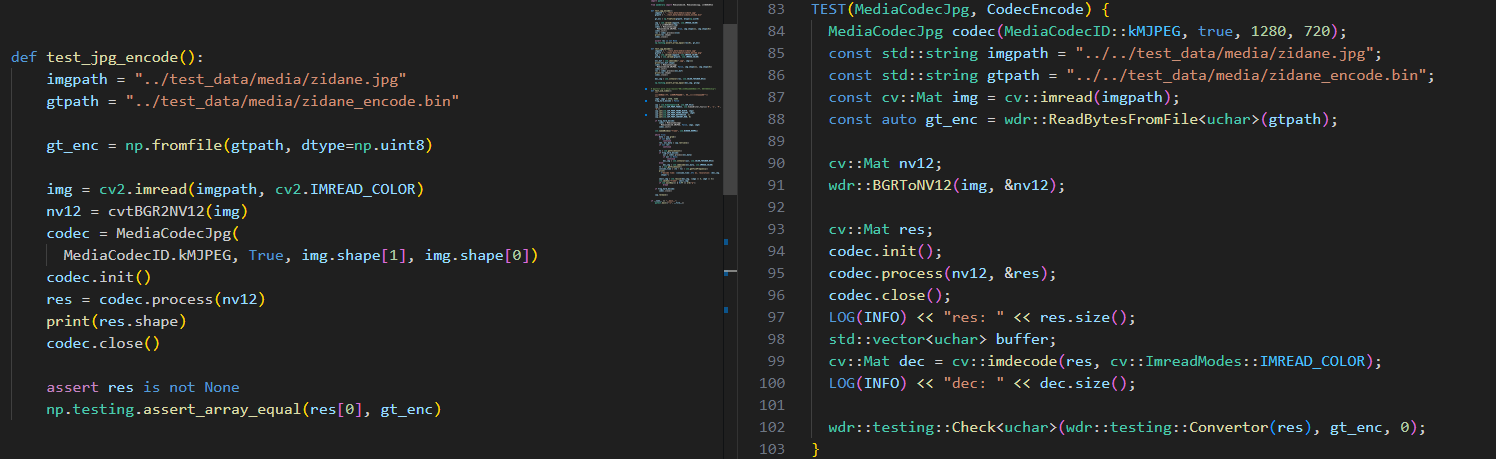
对应的编解码Py版本和C++版本的测试示例如下,MediaCodecJpg类负责MJPG的编解码;
- 构造阶段:可指定编码或解码
- 初始化以及释放都是
init()和close()函数,无序其他参数 - 无论是编码还是解码主函数都是process。编码时输入的是nv12数据,解码则是正常的1xN字节Mat。
四 小结
落地和出Demo完全是一个天一个地。出个Demo,去年就已经搞定了,但是如何将算法落地,达到丝滑的体验,需要更多的时间去打磨。OpenWanderary目前仍然处于初级阶段,我会慢慢将我的所有轮子都补充上去。
编解码问题我目前用着很稳定,各位可以放心食用。后面我也会慢慢完善BPU的接口适配,集成超神Cauchy_WuChao的顶级Yolo项目。
相关文章:
[RDK X5] MJPG编解码开发实战:从官方API到OpenWanderary库的C++/Python实现
业余时间一直在基于RDK X5搞一些小研究,需要基于高分辨率图像检测目标。实际落地时,在图像采集上遇到了个大坑。首先,考虑到可行性,我挑选了一个性价比最高的百元内摄像头,已确定可以在X5上使用,接下来就开…...

java复习 05
我的天啊一天又要过去了,没事的还有时间!!! 不要焦虑不要焦虑,事实证明只要我认真地投入进去一切都还是来得及的,代码多实操多复盘,别叽叽喳喳胡思乱想多多思考,有迷茫前害怕后的功…...
aardio 简单网页自动化
WebView自动化,以前每次重复做网页登录、搜索这些操作时都觉得好麻烦,现在终于能让程序替我干活了,赶紧记录下这个超实用的技能! 一、初次接触WebView WebView自动化就像给程序装了个"网页浏览器",第一步得…...

打卡第39天:Dataset 和 Dataloader类
知识点回顾: 1.Dataset类的__getitem__和__len__方法(本质是python的特殊方法) 2.Dataloader类 3.minist手写数据集的了解 作业:了解下cifar数据集,尝试获取其中一张图片 import torch import torch.nn as nn import…...

【评测】Qwen3-Embedding模型初体验
每一篇文章前后都增加返回目录 回到目录 【评测】Qwen3-Embedding模型初体验 模型的介绍页面 本机配置:八代i5-8265U,16G内存,无GPU核显运行,win10操作系统 ollama可以通过下面命令拉取模型: ollama pull modelscope…...

BeanFactory 和 FactoryBean 有何区别与联系?
导语: Spring 是后端面试中的“常青树”,而 BeanFactory 与 FactoryBean 的关系更是高频卡人点。很多候选人混淆两者概念,答非所问,轻则失分,重则直接被“pass”。本文将从面试官视角,深入剖析这一经典问题…...

如何做好一份优秀的技术文档:专业指南与最佳实践
如何做好一份优秀的技术文档:专业指南与最佳实践 技术文档是产品开发、用户支持和团队协作的核心工具。高质量的技术文档能够提升开发效率、降低维护成本并改善用户体验。本文将从实践出发,详细讲解如何编写专业、清晰且实用的技术文档。 🌟…...

C语言内存管理和编译优化实战
参考: C语言内存管理“玄学”:从崩溃到精通的避坑指南C语言编译优化实战:从入门到进阶的高效代码优化技巧...

TCP相关问题 第一篇
TCP相关问题1 1.TCP主动断开连接方为什么需要等待2MSL 如上图所示:在被动链接方调用close,发送FIN时进入LAST_ACK状态,但未收到主动连接方的ack确认,需要被动连接方重新发送一个FIN,而为什么是2MSL,一般认为丢失ack在…...

6.Pandas 数据可视化图-1
第三章 数据可视化 文章目录 目录 第三章 数据可视化 文章目录 前言 一、数据可视化 二、使用步骤 1.pyplot 1.1引入库 1.2 设置汉字字体 1.3 数据准备 1.4 设置索引列 编辑 1.5 调用绘图函数 2.使用seaborn绘图 2.1 安装导入seaborn 2.2 设置背景风格 2.3 调用绘图方法 2.…...

软件功能测试报告都包含哪些内容?
软件功能测试报告是软件开发生命周期中的重要文档,主要涵盖以下关键内容: 1.测试概况:概述测试目标、范围和方法,确保读者对测试背景有清晰了解。 2.测试环境:详细描述测试所用的硬件、软件环境,确保…...

在Vue或React项目中使用Tailwind CSS实现暗黑模式切换:从系统适配到手动控制
在现代Web开发中,暗黑模式(Dark Mode)已成为提升用户体验的重要功能。本文将带你使用Tailwind CSS在React项目(Vue项目类似)中实现两种暗黑模式控制方式: 系统自动适配 - 根据用户设备偏好自动切换手动切换 - 通过按钮让用户自由选择 一、项目准备 使…...
Linux--命令行参数和环境变量
1.命令行参数 Linux 命令行参数基础 1.1参数格式 位置参数:无符号,按顺序传递(如 ls /home/user 中 /home/user 是位置参数) 选项参数: 短选项:以 - 开头,单个字母(如 -l 表示长格…...

Android 集成 Firebase 指南
Firebase 是 Google 提供的一套移动开发平台,包含分析、认证、数据库、消息推送等多种服务。以下是在 Android 应用中集成 Firebase 的详细步骤: 1. 准备工作 安装 Android Studio - 确保使用最新版本 创建或打开 Android 项目 - 项目需要配置正确的包…...

springboot线上教学平台
摘要:在社会快速发展的影响下,使线上教学平台的管理和运营比过去十年更加理性化。依照这一现实为基础,设计一个快捷而又方便的网上线上教学平台系统是一项十分重要并且有价值的事情。对于传统的线上教学平台控制模型来说,网上线上…...

阿里云 Linux 搭建邮件系统全流程及常见问题解决
阿里云 Linux 搭建 [conkl.com]邮件系统全流程及常见问题解决 目录 阿里云 Linux 搭建 [conkl.com]邮件系统全流程及常见问题解决一、前期准备(关键配置需重点检查)1.1 服务器与域名准备1.2 系统初始化(必做操作) 二、核心组件安装…...

【Elasticsearch】映射:fielddata 详解
映射:fielddata 详解 1.fielddata 是什么2.fielddata 的工作原理3.主要用法3.1 启用 fielddata(通常在 text 字段上)3.2 监控 fielddata 使用情况3.3 清除 fielddata 缓存 4.使用场景示例示例 1:对 text 字段进行聚合示例 2&#…...

用Python训练自动驾驶神经网络:从零开始驾驭未来之路
用Python训练自动驾驶神经网络:从零开始驾驭未来之路 哈喽,朋友们!我是Echo_Wish,今天咱们聊点超酷的话题——自动驾驶中的神经网络训练,用Python怎么玩转起来? 说实话,自动驾驶一直是科技圈的香饽饽,为什么?因为它承载了未来交通的无限可能:减少事故、提升效率、节…...

【电路】阻抗匹配
📝 阻抗匹配 一、什么是阻抗匹配? 阻抗匹配(Impedance Matching)是指在电子系统中,为了实现最大功率传输或最小信号反射,使信号源、传输线与负载之间的阻抗达到一种“匹配”状态的技术。 研究对象&#x…...
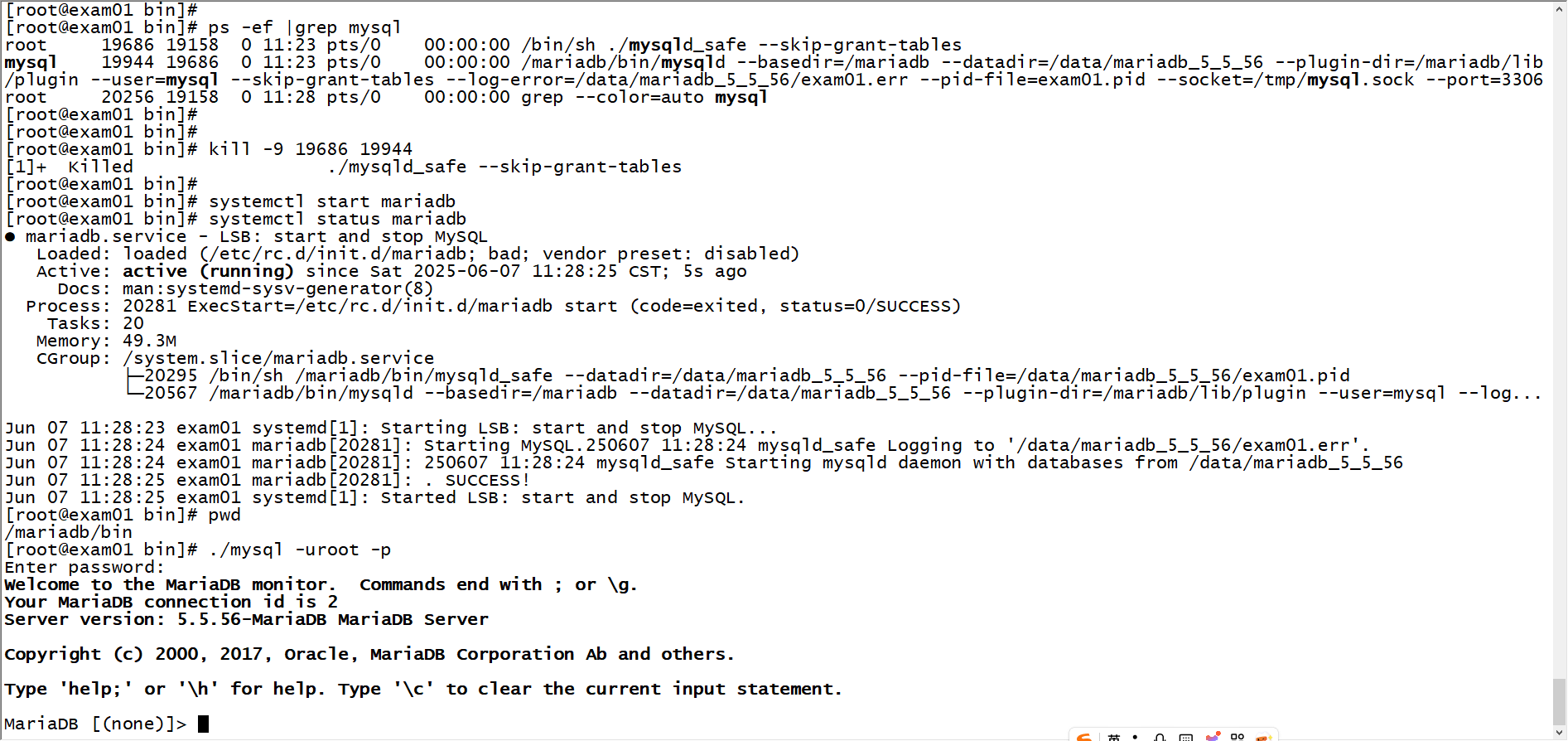
mariadb5.5.56在centos7.6环境安装
mariadb5.5.56在centos7.6环境安装 1 下载安装包 https://mariadb.org/mariadb/all-releases/#5-5 2 上传安装包的服务器 mariadb-5.5.56-linux-systemd-x86_64.tar.gz 3 解压安装包 tar -zxvf mariadb-5.5.56-linux-systemd-x86_64.tar.gz mv mariadb-5.5.56-linux-syst…...

MySQL 索引失效:六大场景与原理剖析
我们都熟知索引是优化 MySQL 查询性能的利器。但你是否遇到过这样的困境:明明在表上建立了索引,查询却依然缓慢,EXPLAIN 分析后发现索引并未被使用?这就是所谓的“索引失效”。 索引失效并非一个 Bug,而是 MySQL 查询…...

打造你的 Android 图像编辑器:深入解析 PhotoEditor 开源库
📸 什么是 PhotoEditor? PhotoEditor 是一个专为 Android 平台设计的开源图像编辑库,旨在为开发者提供简单易用的图像编辑功能。它支持绘图、添加文本、应用滤镜、插入表情符号和贴纸等功能,类似于 Instagram 的编辑体验。该库采…...

DeepSeek 终章:破局之路,未来已来
目录 一、DeepSeek 技术发展现状回顾二、未来发展趋势2.1 多模态融合的拓展2.2 模型可解释性的强化2.3 垂直领域的深化应用 三、面临的技术挑战3.1 数据隐私与安全难题3.2 算法偏见与公平性困境3.3 网络攻击与恶意利用威胁 四、挑战应对策略探讨4.1 技术层面的解决方案4.2 算法…...

八:操作系统设备管理之缓冲、缓存与假脱机
弥合鸿沟:操作系统中的缓冲、缓存与假脱机技术深度解析 在计算机系统的世界里,存在着一个根本性的速度差异:中央处理器(CPU)的执行速度飞快,而输入/输出(I/O)设备(如硬盘…...

Azure 虚拟机端口资源:专用 IP 和公共 IP Azure Machine Learning 计算实例BUG
## 报错无解 找不到Azure ML 计算实例关联的 NSG .env 文件和 ufw status: .env 文件中 EXPOSE_NGINX_PORT8080 是正确的,它告诉 docker-compose.yaml 将 Nginx 暴露在宿主机的 8080 端口。 sudo ufw status 显示 Status: inactive,意味着宿…...
Java核心技术-卷I-读书笔记(第十二版)
第一章 Java程序设计概述 09年sun被oracle收购->11年java7(简单改进)->14年java8(函数式编程)->2017年java9->2018年java11->2021年java17 第二章 Java编程环境 Java9后新增JShell,提供类似脚本试执…...

从C到C++语法过度1
从C到C语法过度1 文章目录 从C到C语法过度11. 字符串string2. 引用3. 类型转换3.1 新式转换 const_cast3.2 新式转换 static_cast 4. 关键字auto 1. 字符串string C语言从本质上来说,是没有字符串这种类型的,在C语言中如果要表达字符串,只能…...

AI是如何换装的?
AI换装是一种基于计算机视觉、深度学习和生成对抗网络(GAN)的技术,能够通过算法自动识别人像并更换服饰,实现虚拟换装的效果。这项技术广泛应用于电商服装试穿、虚拟偶像、影视特效、社交媒体滤镜等领域。 AI换装的核心技术 1. 图像分割与人体解析 换装的第一步是图像分…...

MATLAB遍历生成20到1000个节点的无线通信网络拓扑推理数据
功能: 遍历生成20到1000个节点的无线通信网络拓扑推理数据,包括网络拓扑和每个节点发射的电磁信号,采样率1MHz/3000,信号时长5.7s,单帧数据波形为实采 数据生成效果: 拓扑及空间位置: 节点电磁…...
)
python爬虫:grequests的详细使用(基于gevent和requests的异步HTTP请求库)
更多内容请见: 爬虫和逆向教程-专栏介绍和目录 文章目录 一、grequests 概述1.1 grequests 介绍1.2 注意事项1.3 替代方案比较1.4 基本组件1.5 grequests 安装二、基本用法2.1 创建请求任务2.2 发送请求并获取响应2.3 带参数的请求三、高级用法3.1 自定义回调函数3.2 设置超时…...