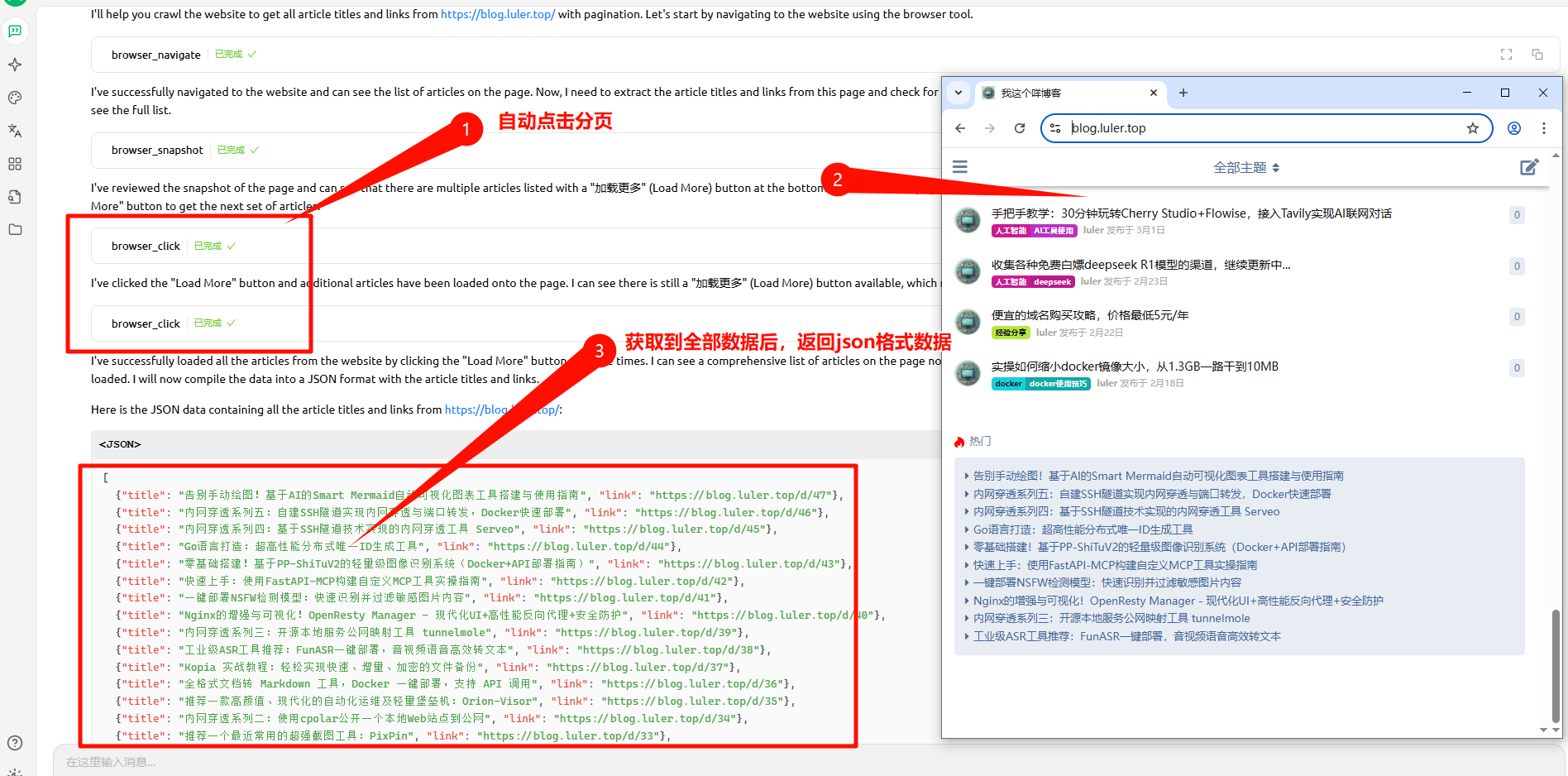
基于FPGA的超声波显示水位距离,通过蓝牙传输水位数据到手机,同时支持RAM存储水位数据,读取数据。
基于FPGA的超声波显示水位距离
- 前言
- 一、整体框架
- 二、代码架构
- 1.超声波测距模块
- 2.蓝牙数据发送模块
- 3.数码管数据切换模块
- 4.数码管驱动模块
- 6.串口驱动
- 7.顶层模块
- 8.RAM ip核
- 仿真相关截图
前言
随着工业化进程的加速和环境保护意识的提升,对水资源管理和水位监测的需求日益迫切。传统的水位监测系统多采用单片机或PLC作为控制核心存在处理速度慢、实时性差、扩展性有限等问题。基于FPGA的水位监测系统以其强大的并行处理能力、高度的灵活性和可重配置性,为水位监测提供了新的解决方案。本课题旨在设计并实现一个基于FPGA的水位监测系统,通过实时采集水位数据,结合先进的数据处理算法,实现高效、准确的水位监测。
本课题聚焦于设计一个基于FPGA的水位监测系统,它通过部署在水源处的传感器精确获取水位信息,利用FPGA强大的并行处理能力实时分析数据一旦水位超限立即触发报警,并上传数据至监测中心进行记录和存储。
1)查找资料对水位监测技术进行了解,提出系统整体设计方案。
2)选择适合的传感器模块、FPGA模块、通信模块、显示块等进行系统硬件设计。
3)利用自顶向下的设计方法进行系统顶层设计,并分模块进行FPGA程序设进行软硬件系统调试。
一、整体框架
硬件需求:FPGA开发板、数码管模块、3个按键、1个复位按键、蓝牙模块、超声波测距模块、蜂鸣器模块
软件模块框架:
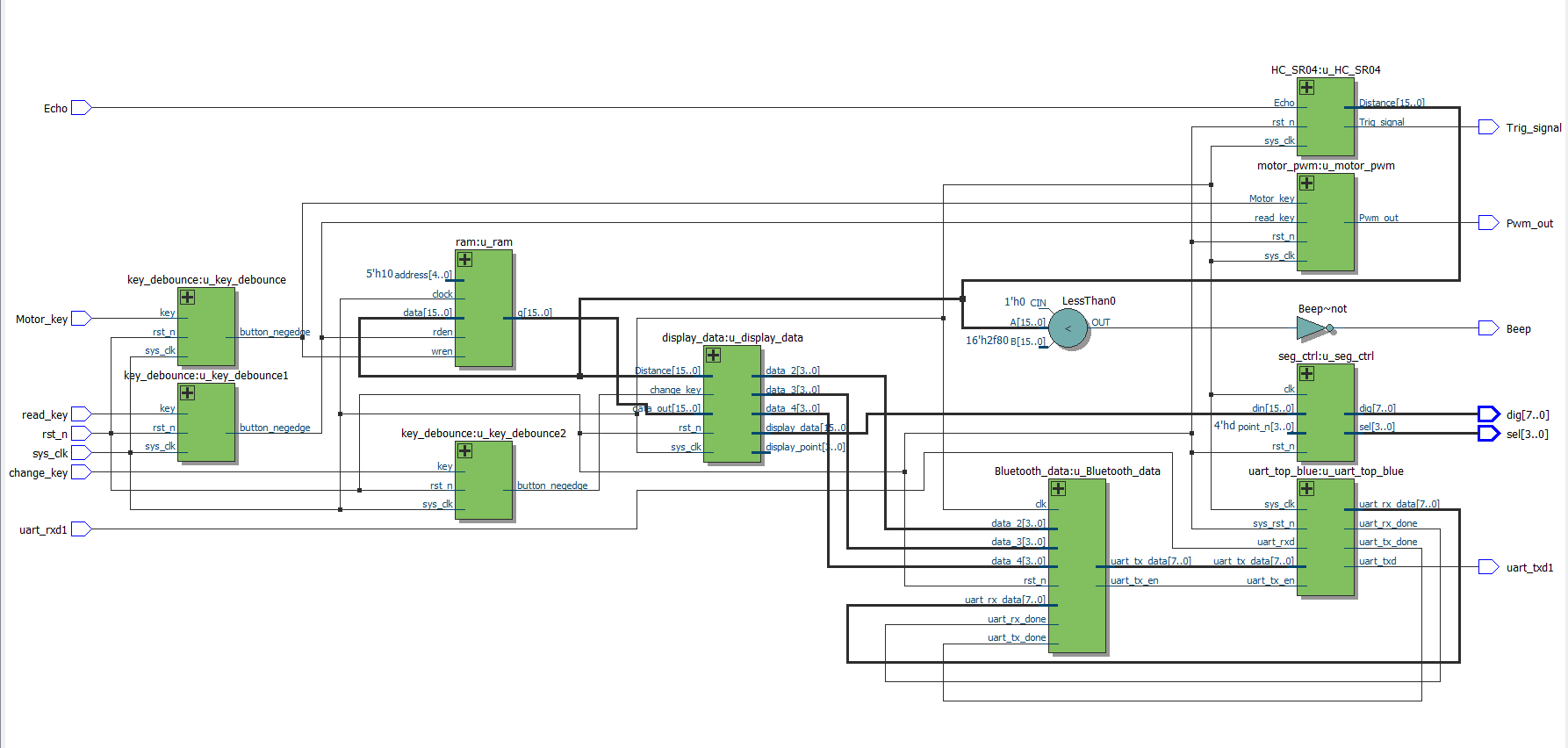
二、代码架构
(仿真不需要按键消抖,同时时间间隔缩小)
1.超声波测距模块
`timescale 1ns / 1ps
//
// Company:
// Engineer:
//
// Create Date: 2025/04/12 16:01:55
// Design Name:
// Module Name: HC_SR04
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//module HC_SR04(input sys_clk , input rst_n, //signal input Echo,output wire [15:0] Distance,output reg Trig_signal);parameter IDLE=4'd0;
parameter SEND=4'd1;
parameter RECIEVE=4'd2;
parameter OVER=4'd3;parameter MAX_CNT=24'd500;
parameter time_1s=32'd50000000;
reg [3:0] state;
reg [3:0] state_1;
reg [23:0] cnt;
reg [31:0] time_cnt;
reg [23:0] distance_temp;
reg key_start;assign Distance=distance_temp/1000;
always @(posedge sys_clk or negedge rst_n)beginif(!rst_n)begintime_cnt<=32'd0;key_start<=1'b0;endelse if(time_cnt<time_1s)begintime_cnt<=time_cnt+1;key_start<=1'b0;endelse if(time_cnt==time_1s)begintime_cnt<=32'd0;key_start<=1'b1;end
endalways @(posedge sys_clk or negedge rst_n)beginif(!rst_n)beginstate<=IDLE;Trig_signal<=1'b0;state_1<=IDLE;distance_temp<=24'd10000000;cnt<=24'd0;endelse begincase(state)IDLE:begincnt<=24'd0;if(key_start==1'b1)beginstate<=SEND;endelse beginstate<=IDLE;endendSEND:beginif(cnt<MAX_CNT)begincnt<=cnt+1;Trig_signal<=1'b1;state<=SEND;endelse begincnt<=16'd0;Trig_signal<=1'b0;state<=RECIEVE;endendRECIEVE:begincase(state_1)IDLE:beginif(Echo==1'b1)beginstate_1<=RECIEVE; endelse beginstate_1<=IDLE;endendRECIEVE:beginif(Echo==1'b1)begincnt<=cnt+1; endelse begincnt<=cnt+1;state_1<=OVER;endendOVER:beginstate_1<=IDLE;state<=OVER;enddefault:state_1<=IDLE;endcaseendOVER:begindistance_temp<=cnt*34;state<=IDLE;enddefault:state<=IDLE;endcaseend
endendmodule2.蓝牙数据发送模块
module Bluetooth_data(input clk,input rst_n,input [3:0] data_3,input [3:0] data_2,input [3:0] data_4,input uart_tx_done,input [7 :0] uart_rx_data,input uart_rx_done,output reg uart_tx_en,output reg [7:0] uart_tx_data);parameter IDLE = 4'd0;parameter WAIT_1s = 4'd1;parameter SEND = 4'd2;parameter OVER = 4'd3;parameter count_max = 32'd50000000; ////spo2:23.6 ----> 74 65 6D 70 3A 32 33 2E 36 0d 0a//hert:23.6 ----> 68 75 6D 69 3A 32 33 2E 36 0d 0areg [87:0] cmd_temp ={8'h68,8'h20,8'h3a,8'h32,8'h32,8'h2e,8'h33,8'h63,8'h6d,8'h0d,8'h0a};reg [87:0] cmd_humi ={8'h68,8'h20,8'h3a,8'h32,8'h32,8'h2e,8'h33,8'h63,8'h6d,8'h0d,8'h0a};reg [3: 0] state;reg [31:0] count;reg [5 :0] tx_count;reg [1: 0] tx_en_count;reg uart_tx_en_temp;reg [1 :0] change_count;wire [7:0] bluedata_1;wire [7:0] bluedata_2;wire [7:0] bluedata_3;assign bluedata_1=(data_4==4'd0)?8'h20:8'h30+data_4;assign bluedata_2=8'h30+data_3;assign bluedata_3=8'h30+data_2;//����״̬tx_dataalways @(posedge clk or negedge rst_n) beginif(!rst_n) beginuart_tx_data <= 8'd0;endelse if(change_count==2'd0)beginif((state==SEND) && tx_count<8'd3 ) beginuart_tx_data <= cmd_temp[87 - tx_count *8 -:8];endelse if((state==SEND) && tx_count==8'd3 ) beginuart_tx_data <= bluedata_1;endelse if((state==SEND) && tx_count==8'd4 ) beginuart_tx_data <= bluedata_2;endelse if((state==SEND) && tx_count==8'd5 ) beginuart_tx_data <= 8'h3a;endelse if((state==SEND) && tx_count==8'd6 ) beginuart_tx_data <= bluedata_3;endelse if((state==SEND) && tx_count<8'd11 ) beginuart_tx_data <= cmd_temp[87 - tx_count *8 -:8];end endelse if(change_count==2'd1)beginif((state==SEND) && tx_count<8'd3 ) beginuart_tx_data <= cmd_humi[87 - tx_count *8 -:8];endelse if((state==SEND) && tx_count==8'd3 ) beginuart_tx_data <= bluedata_1;endelse if((state==SEND) && tx_count==8'd4 ) beginuart_tx_data <= bluedata_2;endelse if((state==SEND) && tx_count==8'd5 ) beginuart_tx_data <= 8'h3a;endelse if((state==SEND) && tx_count==8'd6 ) beginuart_tx_data <= bluedata_3;endelse if((state==SEND) && tx_count<8'd11 ) beginuart_tx_data <= cmd_humi[87 - tx_count *8 -:8];end endend//tx_en timealways @(posedge clk or negedge rst_n) beginif(!rst_n) begintx_en_count <= 2'b0;endelse if((state==SEND) && tx_en_count<2'd1 && tx_count==8'd0) begintx_en_count <=tx_en_count+ 1'd1;endelse if((state==SEND) && tx_en_count==2'd1 && tx_count==8'd0) begintx_en_count <= 2'd3;endelse if(state==OVER)begintx_en_count <= 2'd0;endelse begintx_en_count <= tx_en_count;end
end//����״̬tx_countalways @(posedge clk or negedge rst_n) beginif(!rst_n) begintx_count <= 8'd0;endelse if(state==SEND) beginif(uart_tx_done==1'd1)tx_count <= tx_count+1'b1;endelse begintx_count <= 8'd0;end
end//����״̬data_tx_enalways @(posedge clk or negedge rst_n) beginif(!rst_n) beginuart_tx_en_temp <= 1'b0;uart_tx_en <= uart_tx_en_temp;endelse if((state==SEND ) && tx_en_count==1) beginuart_tx_en_temp <= 1'b1;uart_tx_en <= uart_tx_en_temp;endelse if((state==SEND ) && tx_count<8'd10 && uart_tx_done==1)beginuart_tx_en_temp <= 1'b1;uart_tx_en <= uart_tx_en_temp;endelse beginuart_tx_en_temp <= 1'b0;uart_tx_en <= uart_tx_en_temp;endend//state go always @(posedge clk or negedge rst_n) beginif(!rst_n) begincount <= 32'd0;endelse if(state == WAIT_1s && count < count_max)begincount <= count + 32'd1;endelse if(state == WAIT_1s && count == count_max)begincount <= 32'd0;endelse begincount <= count;endend//state go always @(posedge clk or negedge rst_n) beginif(!rst_n) beginstate <= IDLE;change_count<=2'd0;endelse begincase(state)IDLE:beginstate<=WAIT_1s;endWAIT_1s:beginif(count==count_max)beginstate<=SEND;endelse beginstate<=WAIT_1s;endendSEND:beginif(tx_count==6'd11)beginstate <= OVER;endelse beginstate <= SEND;endendOVER:beginstate <= IDLE;if(change_count<2'd1)beginchange_count<=change_count+2'd1;endelse if(change_count==2'd1)beginchange_count<=2'd0;endenddefault:state <= IDLE;endcaseendendendmodule3.数码管数据切换模块
`timescale 1ns / 1ps
//
// Company:
// Engineer:
//
// Create Date: 2025/05/26 14:56:37
// Design Name:
// Module Name: display_data
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//module display_data(input sys_clk , input rst_n, input change_key, input [15:0] Distance,input [15:0] data_out,output wire [3:0] data_3,output wire [3:0] data_2,output wire [3:0] data_4,output reg [3 :0] display_point,output reg [15:0] display_data);wire [15:0] Distance_temp;wire [15:0] data;wire [3:0] data_1;
// wire [3:0] data_3;
// wire [3:0] data_2;
// wire [3:0] data_4;reg [1:0] cnt;function [15:0]Hex_to_Doc;
input [15:0] num_h;
beginHex_to_Doc = num_h[3:0] + num_h[7:4]*16 +num_h[11:8]*256 +num_h[15:12]*4096;
end
endfunctionassign data=(cnt==2'd0)?Distance:data_out;assign Distance_temp=Hex_to_Doc(data);assign data_1=Distance_temp%10;assign data_2=(Distance_temp%100)/10;assign data_3=(Distance_temp%1000)/100;assign data_4=(Distance_temp/1000);always @(posedge sys_clk or negedge rst_n)beginif(!rst_n)begincnt<=2'd0;endelse if(change_key && cnt<2'd1)begincnt<=cnt+1;endelse if(change_key && cnt==2'd1)begincnt<=2'd0;endendalways @(*)beginif(data_4==4'd0)begindisplay_data<={4'he,data_3,data_2,data_1};display_point<=4'b1111;endelse begindisplay_data<={data_4,data_3,data_2,data_1};display_point<=4'b1111;endendendmodule4.数码管驱动模块
module seg_ctrl( input clk ,input rst_n ,input [15:0] din ,//????6��???????????????��???????4��input [3:0] point_n ,//????��????????��output reg [3:0] sel ,//????��?output reg [7:0] dig //???????
);
//---------<????????>--------------------------------------------------------- parameter TIME_1MS = 50_000;//1ms//????????????????localparam NUM_0 = 7'b100_0000,//0NUM_1 = 7'b111_1001,//1NUM_2 = 7'b010_0100,//NUM_3 = 7'b011_0000,//NUM_4 = 7'b001_1001,//NUM_5 = 7'b001_0010,//NUM_6 = 7'b000_0010,//NUM_7 = 7'b111_1000,//NUM_8 = 7'b000_0000,//NUM_9 = 7'b001_0000,//A = 7'b000_1000,//B = 7'b000_0011,//bC = 7'b100_0110,//OFF = 7'b111_1111,//???CROSS = 7'b011_1111,//????//D = 7'b010_0001,//d//E = 7'b000_0110,//F = 7'b000_1110;////---------<?????????>-----------------------------------------------------reg [15:0] cnt_1ms ;//1ms???????????????????????wire add_cnt_1ms ;wire end_cnt_1ms ;reg [3:0] disp_data ;//??��??????????????reg point_n_r ;//??��???????????��????//****************************************************************
//--cnt_1ms
//****************************************************************always @(posedge clk or negedge rst_n)begin if(!rst_n)begincnt_1ms <= 'd0;end else if(add_cnt_1ms)begin if(end_cnt_1ms)begin cnt_1ms <= 'd0;endelse begin cnt_1ms <= cnt_1ms + 1'b1;end endend assign add_cnt_1ms = 1'b1;//??????????assign end_cnt_1ms = add_cnt_1ms && cnt_1ms == TIME_1MS - 1;//****************************************************************
//--seg_sel
//****************************************************************always @(posedge clk or negedge rst_n)begin if(!rst_n)beginsel <= 4'b1_110;//?????��???????????��??????end else if(end_cnt_1ms)begin sel <= {sel[2:0],sel[3]};//???????end end//****************************************************************
//--disp_data
//****************************************************************always @(posedge clk or negedge rst_n)begin if(!rst_n)begindisp_data <= 'd0;point_n_r <= 1'b1;end else begin case (sel)4'b1_110 : begin disp_data <= din[3:0] ; point_n_r <= point_n[0]; end//???��??????????????4'b1_101 : begin disp_data <= din[7:4] ; point_n_r <= point_n[1]; end4'b1_011 : begin disp_data <= din[11:8] ; point_n_r <= point_n[2]; end4'b0_111 : begin disp_data <= din[15:12]; point_n_r <= point_n[3]; enddefault: disp_data <= 'd0;endcaseend end//****************************************************************
//--seg_dig
//****************************************************************always @(*)begin case (disp_data)0 : dig = {point_n_r,NUM_0};1 : dig = {point_n_r,NUM_1};2 : dig = {point_n_r,NUM_2};3 : dig = {point_n_r,NUM_3};4 : dig = {point_n_r,NUM_4};5 : dig = {point_n_r,NUM_5};6 : dig = {point_n_r,NUM_6};7 : dig = {point_n_r,NUM_7};8 : dig = {point_n_r,NUM_8};9 : dig = {point_n_r,NUM_9};10 : dig = {point_n_r,A };11 : dig = {point_n_r,B };12 : dig = {point_n_r,C };13 : dig = {point_n_r,CROSS};14 : dig = {point_n_r,OFF };15 : dig = {point_n_r,F };default: dig = 8'hff;endcaseendendmodule6.串口驱动
module uart_top_blue( input sys_clk , //�ⲿ50MHzʱ��input sys_rst_n, //ϵ�ⲿ��λ�źţ�����Ч//UART�˿� input uart_rxd , //UART���ն˿�output uart_txd , //UART���Ͷ˿�input uart_tx_en, //UART���������ź�output wire uart_rx_done, //UART���������ź� output wire uart_tx_done, //UART���������ź� input [7:0] uart_tx_data, //UART�������� output wire [7:0] uart_rx_data //UART�������� );//parameter define
parameter CLK_FREQ = 50000000; //����ϵͳʱ��Ƶ��
parameter UART_BPS = 9600 ; //���崮�ڲ�����//wire define
//wire uart_rx_done; //UART���������ź�
//wire [7:0] uart_rx_data; //UART��������//*****************************************************
//** main code
//*****************************************************//���ڽ���ģ��
uart_rx_blue #(.CLK_FREQ (CLK_FREQ),.UART_BPS (UART_BPS)) u_uart_rx_blue(.clk (sys_clk ),.rst_n (sys_rst_n ),.uart_rxd (uart_rxd ),.uart_rx_done (uart_rx_done),.uart_rx_data (uart_rx_data));uart_tx_blue #(.CLK_FREQ (CLK_FREQ),.UART_BPS (UART_BPS)) u_uart_tx_blue(.clk (sys_clk ),.rst_n (sys_rst_n ),.uart_tx_en (uart_tx_en),.uart_tx_data (uart_tx_data),.uart_tx_done (uart_tx_done),.uart_txd (uart_txd ),.uart_tx_busy ( ));endmodulemodule uart_rx_blue(input clk , //ϵͳʱ��input rst_n , //ϵͳ��λ������Чinput uart_rxd , //UART���ն˿�output reg uart_rx_done, //UART���������ź�output reg [7:0] uart_rx_data //UART���յ�������);//parameter define
parameter CLK_FREQ = 100000000; //ϵͳʱ��Ƶ��
parameter UART_BPS = 115200 ; //���ڲ�����
localparam BAUD_CNT_MAX = CLK_FREQ/UART_BPS; //Ϊ�õ�ָ�������ʣ���ϵͳʱ�Ӽ���BPS_CNT��//reg define
reg uart_rxd_d0;
reg uart_rxd_d1;
reg uart_rxd_d2;
reg rx_flag ; //���չ��̱�־�ź�
reg [3:0 ] rx_cnt ; //�������ݼ�����
reg [15:0] baud_cnt ; //�����ʼ�����
reg [7:0 ] rx_data_t ; //�������ݼĴ���//wire define
wire start_en;//*****************************************************
//** main code
//*****************************************************
//�������ն˿��½���(��ʼλ)���õ�һ��ʱ�����ڵ������ź�
assign start_en = uart_rxd_d2 & (~uart_rxd_d1) & (~rx_flag);//�����첽�źŵ�ͬ������
always @(posedge clk or negedge rst_n) beginif(!rst_n) beginuart_rxd_d0 <= 1'b0;uart_rxd_d1 <= 1'b0;uart_rxd_d2 <= 1'b0;endelse beginuart_rxd_d0 <= uart_rxd;uart_rxd_d1 <= uart_rxd_d0;uart_rxd_d2 <= uart_rxd_d1;end
end//�����ձ�־��ֵ
always @(posedge clk or negedge rst_n) beginif(!rst_n) rx_flag <= 1'b0;else if(start_en) //�����ʼλrx_flag <= 1'b1; //���չ����У���־�ź�rx_flag���//��ֹͣλһ����ʱ�����չ��̽�������־�ź�rx_flag���else if((rx_cnt == 4'd9) && (baud_cnt == BAUD_CNT_MAX/2 - 1'b1))rx_flag <= 1'b0;elserx_flag <= rx_flag;
end //�����ʵļ�������ֵ
always @(posedge clk or negedge rst_n) beginif(!rst_n) baud_cnt <= 16'd0;else if(rx_flag) begin //���ڽ��չ���ʱ�������ʼ�������baud_cnt������ѭ������if(baud_cnt < BAUD_CNT_MAX - 1'b1)baud_cnt <= baud_cnt + 16'b1;else baud_cnt <= 16'd0; //�����ﵽһ�����������ں�����end elsebaud_cnt <= 16'd0; //���չ��̽���ʱ����������
end//�Խ������ݼ�������rx_cnt�����и�ֵ
always @(posedge clk or negedge rst_n) beginif(!rst_n) rx_cnt <= 4'd0;else if(rx_flag) begin //���ڽ��չ���ʱrx_cnt�Ž��м���if(baud_cnt == BAUD_CNT_MAX - 1'b1) //�������ʼ�����������һ������������ʱrx_cnt <= rx_cnt + 1'b1; //�������ݼ�������1elserx_cnt <= rx_cnt;endelserx_cnt <= 4'd0; //���չ��̽���ʱ����������
end //����rx_cnt��Ĵ�rxd�˿ڵ�����
always @(posedge clk or negedge rst_n) beginif(!rst_n) rx_data_t <= 8'b0;else if(rx_flag) begin //ϵͳ���ڽ��չ���ʱif(baud_cnt == BAUD_CNT_MAX/2 - 1'b1) begin //�ж�baud_cnt�Ƿ�����������λ���м�case(rx_cnt)4'd1 : rx_data_t[0] <= uart_rxd_d2; //�Ĵ����ݵ�����λ4'd2 : rx_data_t[1] <= uart_rxd_d2;4'd3 : rx_data_t[2] <= uart_rxd_d2;4'd4 : rx_data_t[3] <= uart_rxd_d2;4'd5 : rx_data_t[4] <= uart_rxd_d2;4'd6 : rx_data_t[5] <= uart_rxd_d2;4'd7 : rx_data_t[6] <= uart_rxd_d2;4'd8 : rx_data_t[7] <= uart_rxd_d2; //�Ĵ����ݵĸߵ�λdefault : ;endcase endelserx_data_t <= rx_data_t;endelserx_data_t <= 8'b0;
end //�����������źźͽ��յ������ݸ�ֵ
always @(posedge clk or negedge rst_n) beginif(!rst_n) beginuart_rx_done <= 1'b0;uart_rx_data <= 8'b0;end//���������ݼ�����������ֹͣλ����baud_cnt������ֹͣλ���м�ʱelse if(rx_cnt == 4'd9 && baud_cnt == BAUD_CNT_MAX/2 - 1'b1) beginuart_rx_done <= 1'b1 ; //��߽��������ź�uart_rx_data <= rx_data_t; //����UART���յ������ݽ��и�ֵend else beginuart_rx_done <= 1'b0;uart_rx_data <= uart_rx_data;end
endendmodule
module uart_tx_blue(input clk , //ϵͳʱ��input rst_n , //ϵͳ��λ������Чinput uart_tx_en , //UART�ķ���ʹ��input [7:0] uart_tx_data, //UARTҪ���͵�����output reg uart_txd , //UART���Ͷ˿�output reg [3:0] tx_cnt , //�������ݼ�����output reg [15:0] baud_cnt , //�����ʼ�����output reg uart_tx_done,output reg uart_tx_busy //����æ״̬�ź�);//parameter define
parameter CLK_FREQ = 100000000; //ϵͳʱ��Ƶ��
parameter UART_BPS = 115200 ; //���ڲ�����
localparam BAUD_CNT_MAX = CLK_FREQ/UART_BPS; //Ϊ�õ�ָ�������ʣ���ϵͳʱ�Ӽ���BPS_CNT��//reg define
reg [7:0] tx_data_t; //�������ݼĴ���
//�����ʵļ�������ֵ
always @(posedge clk or negedge rst_n) beginif(!rst_n) uart_tx_done<=1'b0;else if(tx_cnt == 4'd9 && baud_cnt == BAUD_CNT_MAX - 1) beginuart_tx_done<=1'b1;end elseuart_tx_done<=1'b0; //�����̽���ʱ����������
end//*****************************************************
//** main code
//*****************************************************//��uart_tx_enΪ��ʱ���Ĵ������IJ������ݣ������BUSY�ź�
always @(posedge clk or negedge rst_n) beginif(!rst_n) begintx_data_t <= 8'b0;uart_tx_busy <= 1'b0;end//����ʹ��ʱ���Ĵ�Ҫ���͵����ݣ������BUSY�ź�else if(uart_tx_en) begintx_data_t <= uart_tx_data;uart_tx_busy <= 1'b1;end//��������ֹͣλ����ʱ��ֹͣ������else if(tx_cnt == 4'd9 && baud_cnt == BAUD_CNT_MAX - 1) begintx_data_t <= 8'b0; //���շ������ݼĴ���uart_tx_busy <= 1'b0; //�����BUSY�ź�endelse begintx_data_t <= tx_data_t;uart_tx_busy <= uart_tx_busy;end
end//�����ʵļ�������ֵ
always @(posedge clk or negedge rst_n) beginif(!rst_n) baud_cnt <= 16'd0;else if(uart_tx_en) baud_cnt <= 16'd0; //�����ڷ�����ʱ�������ʼ�������baud_cnt������ѭ������else if(uart_tx_busy) beginif(baud_cnt < BAUD_CNT_MAX - 1'b1)baud_cnt <= baud_cnt + 16'b1;else baud_cnt <= 16'd0; //�����ﵽһ�����������ں�����end elsebaud_cnt <= 16'd0; //�����̽���ʱ����������
end//tx_cnt���и�ֵ
always @(posedge clk or negedge rst_n) beginif(!rst_n) tx_cnt <= 4'd0;else if(uart_tx_en) tx_cnt <= 16'd0; else if(uart_tx_busy) begin //���ڷ�����ʱtx_cnt�Ž��м���if(baud_cnt == BAUD_CNT_MAX - 1'b1) //�������ʼ�����������һ������������ʱtx_cnt <= tx_cnt + 1'b1; //�������ݼ�������1elsetx_cnt <= tx_cnt;endelsetx_cnt <= 4'd0; //�����̽���ʱ����������
end//����tx_cnt���uart���Ͷ˿ڸ�ֵ
always @(posedge clk or negedge rst_n) beginif(!rst_n) uart_txd <= 1'b1;else if(uart_tx_busy) begincase(tx_cnt) 4'd0 : uart_txd <= 1'b0 ; //��ʼλ4'd1 : uart_txd <= tx_data_t[0]; //����λ����λ4'd2 : uart_txd <= tx_data_t[1];4'd3 : uart_txd <= tx_data_t[2];4'd4 : uart_txd <= tx_data_t[3];4'd5 : uart_txd <= tx_data_t[4];4'd6 : uart_txd <= tx_data_t[5];4'd7 : uart_txd <= tx_data_t[6];4'd8 : uart_txd <= tx_data_t[7]; //����λ����λ4'd9 : uart_txd <= 1'b1 ; //ֹͣλdefault : uart_txd <= 1'b1;endcaseendelseuart_txd <= 1'b1; //����ʱ���Ͷ˿�Ϊ�ߵ�ƽ
endendmodule
7.顶层模块
`timescale 1ns / 1ps
//
// Company:
// Engineer:
//
// Create Date: 2025/04/20 09:30:52
// Design Name:
// Module Name: top
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//module top(input sys_clk , input rst_n, input save_key,input read_key,input change_key,input Echo, output wire Trig_signal,input uart_rxd1 , output uart_txd1 ,output wire [3:0] sel,output wire [7:0] dig,output wire sim_start,output wire Beep);//seg signalwire [15:0] display_data;wire [15:0] Distance;wire [3:0] data_3;wire [3:0] data_2;wire [3:0] data_4;wire uart_tx_en1; wire uart_rx_done1; wire uart_tx_done1; wire [7:0] uart_tx_data1; wire [7:0] uart_rx_data1; wire [15:0] data_out;assign Beep=(Distance<16'd500)?1'b0:1'b1;HC_SR04 u_HC_SR04(.sys_clk(sys_clk) ,.rst_n(rst_n) ,.Echo(Echo) ,.Distance(Distance) ,.sim_start(sim_start),.Trig_signal(Trig_signal) );display_data u_display_data(.sys_clk(sys_clk) ,.rst_n(rst_n) ,.Distance(Distance) ,.data_out(data_out) ,.change_key(change_key) ,.data_3(data_3) ,.data_2(data_2) ,.data_4(data_4) ,.display_data(display_data) );ram u_ram (.address ( 5'd1 ),.clock ( sys_clk ),.data ( Distance ),.rden ( read_key ),.wren ( save_key ),.q ( data_out ));Bluetooth_data u_Bluetooth_data(.clk(sys_clk), .rst_n(rst_n), .data_3(data_3) ,.data_2(data_2) ,.data_4(data_4) ,.uart_rx_done (uart_rx_done1),.uart_rx_data (uart_rx_data1),.uart_tx_en (uart_tx_en1),.uart_tx_data (uart_tx_data1),.uart_tx_done (uart_tx_done1) );uart_top_blue u_uart_top_blue(.sys_clk(sys_clk) , .sys_rst_n(rst_n), .uart_rx_done (uart_rx_done1),.uart_rx_data (uart_rx_data1),.uart_tx_en (uart_tx_en1),.uart_tx_data (uart_tx_data1),.uart_tx_done (uart_tx_done1),.uart_rxd(uart_rxd1) , .uart_txd(uart_txd1) );seg_ctrl u_seg_ctrl( .clk(sys_clk) ,.rst_n(rst_n) ,.din(display_data),.point_n(4'b1011) ,.sel(sel) ,.dig(dig)
); endmodule8.RAM ip核
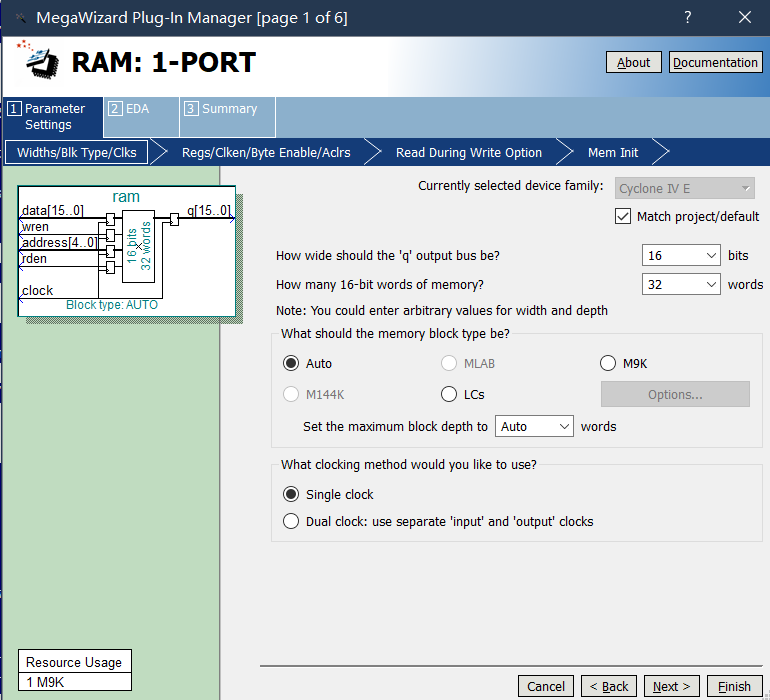
仿真相关截图
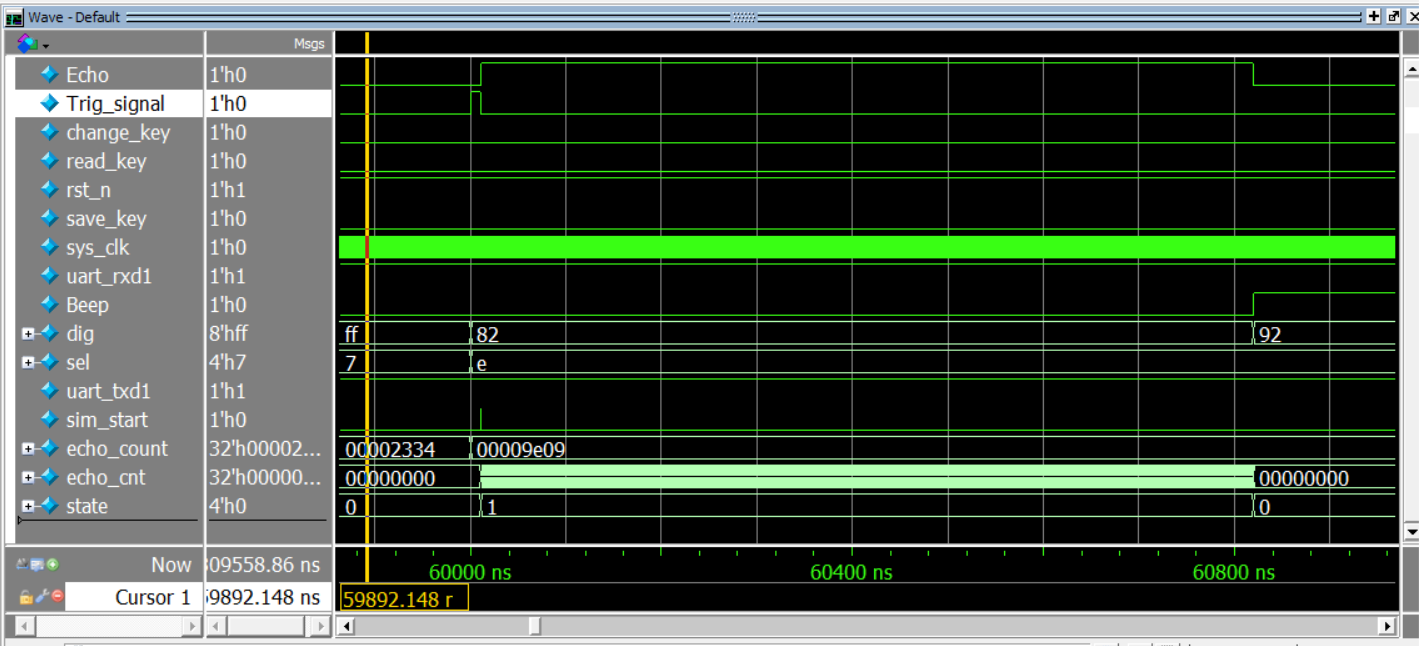
仿真没有按键消抖,测距时间间隔缩短一点,其他正常。
相关文章:
基于FPGA的超声波显示水位距离,通过蓝牙传输水位数据到手机,同时支持RAM存储水位数据,读取数据。
基于FPGA的超声波显示水位距离 前言一、整体框架二、代码架构1.超声波测距模块2.蓝牙数据发送模块3.数码管数据切换模块4.数码管驱动模块6.串口驱动7.顶层模块8.RAM ip核 仿真相关截图 前言 随着工业化进程的加速和环境保护意识的提升,对水资源管理和水位监测的需求…...

使用swoole作为MQTT客户端并接收实现即时消息推送
环境准备 首先需要安装swoole 可以使用pecl进行安装 ,如 pecl install swool, 注意加上版本号 或者使用构建好的docker镜像,这里使用构建好的 zacksleo/php:7.1-alpine-fpm-swoole 镜像 使用 compose 安装依赖库 composer require jesusslim/mqttcl…...
在Windows下利用LoongArch-toolchain交叉编译Qt
文章目录 0.交叉编译的必要性1.下载交叉编译工具链1.1.直接在Windows下使用mingw(不使用虚拟机)编译(还没成功,无法编译)1.2.在虚拟机中的Ubuntu中进行交叉编译 2.下载qt源码3.编译Qt3.1.创建loongarch64的mkspec3.2.创…...

如何在 React 中监听 div 的滚动事件
在 React 中监听 div 的滚动事件(scroll),可以通过为该 div 添加 onScroll 属性来实现。以下是一个基本的例子: ✅ 示例:监听 div 的滚动事件 import React, { useRef } from react;function ScrollComponent() {cons…...

AIRIOT无人机安防解决方案
随着无人机技术的飞速发展和广泛应用,其在安防领域的价值日益凸显,从关键设施巡检、大型活动安保到边境巡防、应急救援,无人机正成为立体化安防体系不可或缺的“空中哨兵”。然而,无人机安防应用蓬勃发展的同时,其自身…...
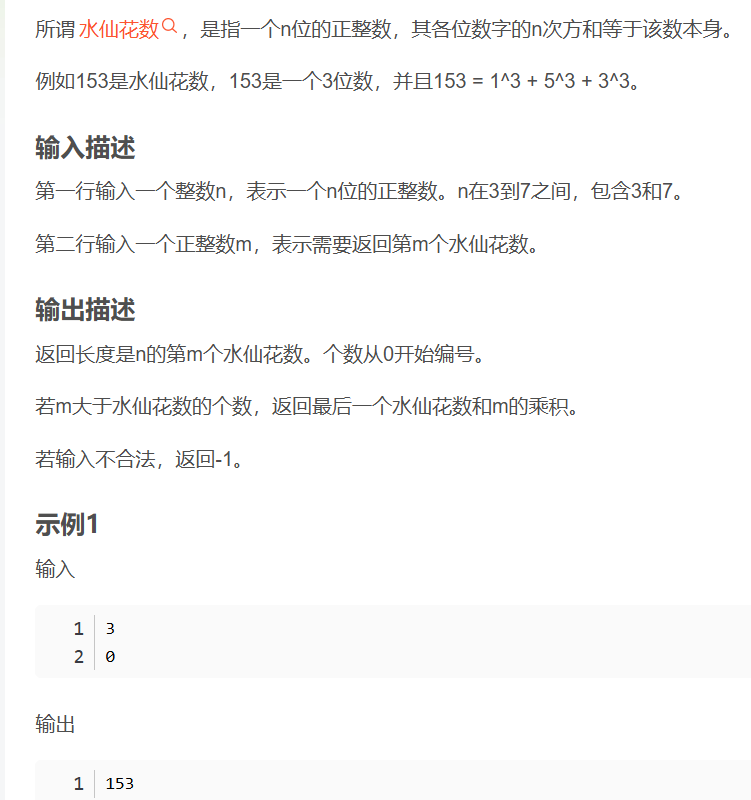
华为OD机考 - 水仙花数 Ⅰ(2025B卷 100分)
import java.util.*; public static Integer get(int count,int c){if(count<3||count>7){return -1;}//存储每位数的最高位……最低位int[] arr new int[count];List<Integer> res new ArrayList<>();for(int i(int) Math.pow(10,count-1);i<(int) Math…...
)
软考 系统架构设计师系列知识点之杂项集萃(81)
接前一篇文章:软考 系统架构设计师系列知识点之杂项集萃(80) 第145题 商业智能是企业对商业数据的搜集、管理和分析的系统过程,主要技术包括()。 A. 数据仓库、联机分析和数据挖掘 B. 数据采集、数据清洗…...
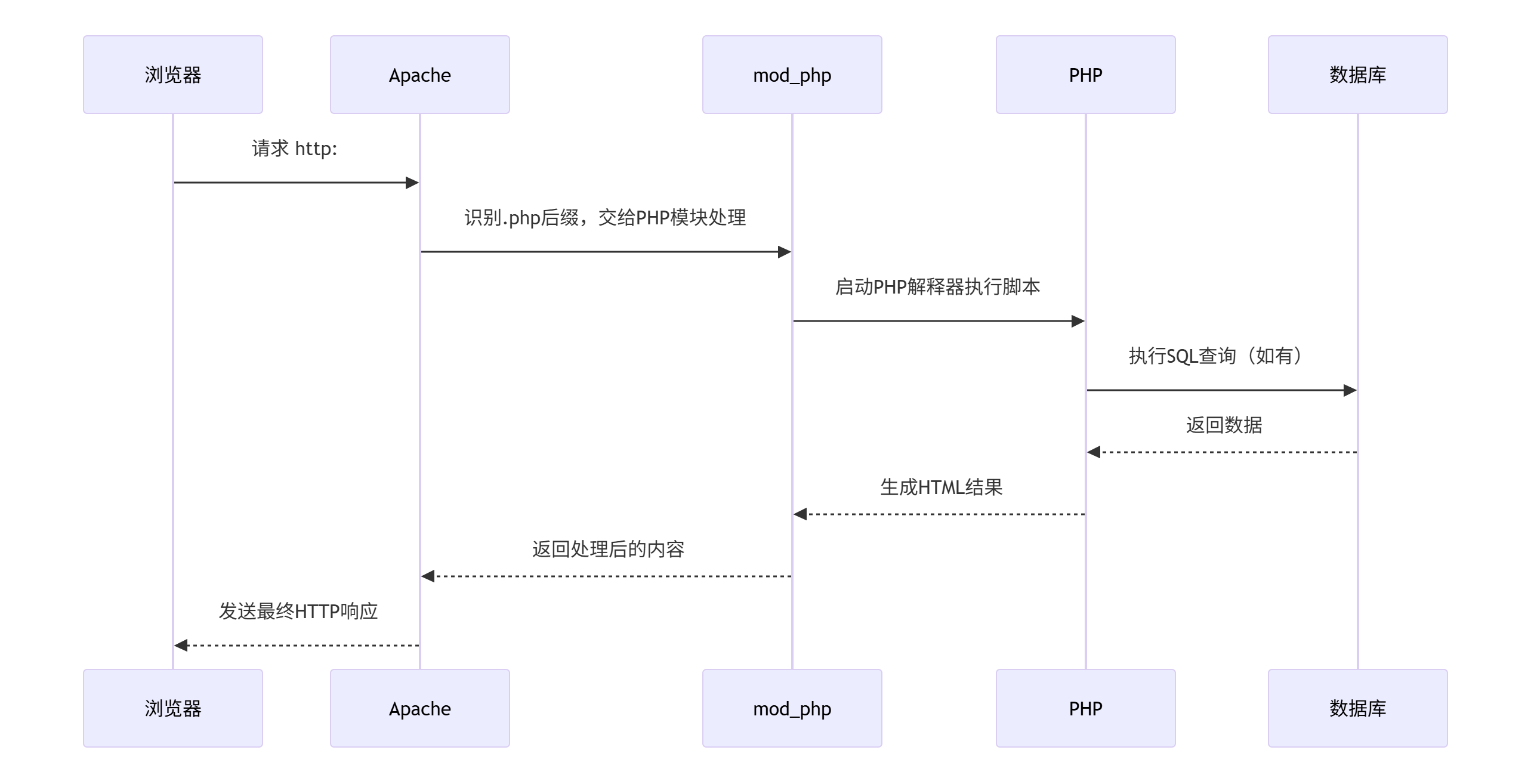
php apache构建 Web 服务器
虚拟机配置流程winsever2016配置Apache、Mysql、php_windows server 2016配置web服务器-CSDN博客 PHP 和 Apache 通过 模块化协作 共同构建 Web 服务器,以下是它们的交互机制和工作流程: 一、核心组件分工 组件角色ApacheWeb …...

Ntfs!ReadIndexBuffer函数分析之nt!CcGetVirtualAddress函数之nt!CcGetVacbMiss
第一部分: NtfsMapStream( IrpContext, Scb, LlBytesFromIndexBlocks( IndexBlock, Scb->ScbType.Index.IndexBlockByteShift ), Scb->ScbType.Index.BytesPerIndexBuffer, &am…...

Vue3 + TypeSrcipt 防抖、防止重复点击实例
需要实现防抖应用场景: 点击【查询】按钮,发送网络请求,等待并接收响应数据 原来点击【查询】的代码: <script setup lang"ts" name"ReagentTransactionsDrawer"> ...... // 查询,没有防…...

SQL进阶之旅 Day 14:数据透视与行列转换技巧
【SQL进阶之旅 Day 14】数据透视与行列转换技巧 开篇 欢迎来到“SQL进阶之旅”系列的第14天!今天我们将探讨数据透视与行列转换技巧,这是数据分析和报表生成中的核心技能。无论你是数据库开发工程师、数据分析师还是后端开发人员,行转列或列…...

打通印染车间“神经末梢”:DeviceNet转Ethernet/IP连接机器人的高效方案
在印染行业自动化升级中,设备联网需求迫切。老旧印染设备多采用Devicenet协议,而新型工业机器人普遍支持Ethernet/IP协议,协议不兼容导致数据交互困难,设备协同效率低、生产监控滞后,成了行业数字化转型的阻碍。本文将…...
)
Ubuntu挂载本地镜像源(像CentOS 一样挂载本地镜像源)
1.挂载 ISO 镜像 sudo mount -o loop /ubuntu-22.04.5-desktop-amd64.iso /mnt/iso 2.备份现有的软件源配置文件: sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak 3.编辑软件源配置文件 编辑 /etc/apt/sources.list sudo nano /etc/apt/sources.l…...
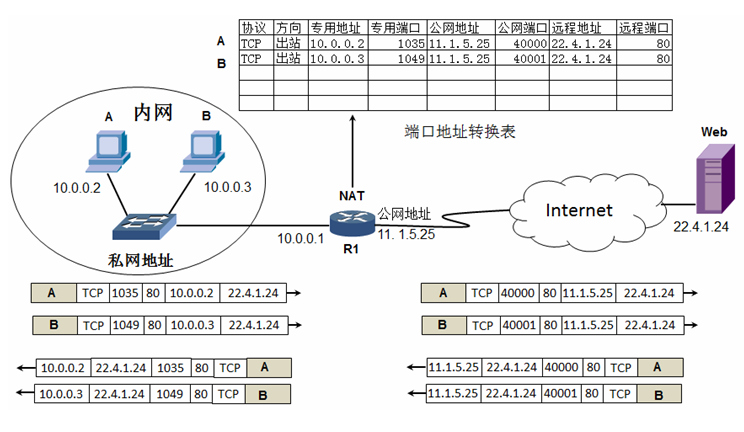
2025-06-02-IP 地址规划及案例分析
IP 地址规划及案例分析 参考资料 Plan for IP addressing - Cloud Adoption Frameworkwww.cnblogs.comimage-hosting/articles at master jonsam-ng/image-hosting 概述 在网络通信中,MAC 地址与 IP 地址分别位于 OSI 模型的数据链路层和网络层,二者协…...
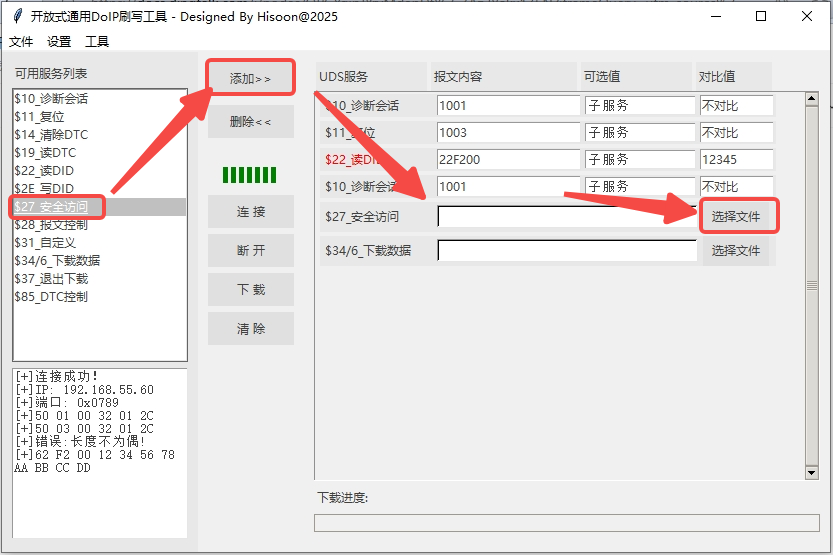
AUTOSAR实战教程--开放式通用DoIP刷写工具OpenOTA开发计划
目录 软件概述 安装与运行 界面说明 3.1 功能区划分 3.2 状态显示 基本操作流程 4.1 DoIP连接配置 4.2 服务配置(刷写流程) 4.3 执行操作 4.4 保存配置 4.5 加载配置 功能详解 5.1 核心功能模块 诊断服务配置 通信设置 文件下载 工具功…...
)
Vue 学习路线图(从零到实战)
🎯 学习目标:掌握 Vue 并能独立开发中大型项目 ✅ 适合人群:前端初学者、想快速上手做项目的开发者、中小型团队成员 🧭 Vue 学习路线图(从零到实战) 第一阶段:基础语法 核心功能(…...
AI赋能的浏览器自动化:Playwright MCP安装配置与实操案例
以下是对Playwright MCP的简单介绍: Playwright MCP 是一个基于 Playwright 的 MCP 工具,提供浏览器自动化功能不要求视觉模型支持,普通的文本大语言模型就可以通过结构化数据与网页交互支持多种浏览器操作,包括截图、点击、拖动…...

AI编程助手入门指南:GitHub Copilot、Cursor与Claude的安装与基础使用
🔥 AI编程助手入门指南:GitHub Copilot、Cursor与Claude的安装与基础使用 你是否曾幻想过拥有一个24小时在线的编程搭档?它能理解你的思路、自动补全代码、解释复杂逻辑,甚至帮你调试错误?如今,这个幻想已成…...

Android 线性布局中常见的冲突属性总结
1. gravity vs layout_gravity 冲突原因:两者作用对象不同,混用会导致行为异常。 区别: android:gravity:父容器的属性,控制子元素在容器内的对齐方式。android:layout_gravity:子元素的属性,控…...
【技术笔记】MSYS2 指定 Python 版本安装方案
#工作记录 MSYS2 指定 Python 版本安装 一、前置条件 安装指定版本需要在干净的 MSYS2 环境中执行,为保证工具链的兼容性,若已安装 Python,需先卸载 Python 及与该版本深度绑定的工具链。具体操作如下: 卸载 Python:…...

《校园生活平台从 0 到 1 的搭建》第一篇:创建项目与构建目录结构
在本系列第一篇中,我们将从项目初始化开始,搭建基本的目录结构,并完成四个主页面的创建与 TabBar 设置。 (tip:你可能会觉得有点 ai 化,因为这个文案是我自己写了一遍文案之后让 ai 去优化输出的࿰…...
)
Boost ASIO 库深入学习(3)
Boost ASIO 库深入学习(3) UDP简单通信导论 在继续深入前,我们不妨也来点碎碎念,因为UDP通信协议的模型与TCP是不同的,这种差异正是理解“无连接通信”的关键所在。我们下面要构建的,是一个经典的UDP通信…...

【如何做好应用架构?】
一、应用架构定义 应用架构描述了各种用于支持业务架构并对数据架构所定义的各种数据进行出来的应用功能。这些应该功能指的是用来管理在数据架构中定义的数据,并对业务架构中定义的各项业务功能进行支持的能力。 其核心目标是确保应用系统高效、灵活、安全的支撑…...

1 Studying《蓝牙核心规范5.3》
目录 [Vol 0][Part B 蓝牙规范要求] 3 定义 3.1 蓝牙产品类型 4 核心配置 4.1 基本速率核心配置 4.2 增强型数据速率核心配置 4.4 低功耗核心配置 4.5 基本速率和低功耗结合的核心配置 4.6 主机控制器接口核心配置 [Vol 1][Part A 架构]1 概述 1.1 BR/EDR操作概述 …...

STM32+MPU6050传感器
#创作灵感## 在嵌入式系统开发中,STM32F103C8T6单片机与MPU6050传感器的组合因其高性能、低功耗以及丰富的功能而备受青睐。本文将简单介绍如何在Keil 5开发环境中实现STM32F103C8T6与MPU6050的连接和基本数据采集,带你快速入门智能硬件开发。 一、硬件…...

el-input限制输入数字,输入中文后数字校验失效
想要的效果:默认值为0,只能输入0-100的数字。 实现方式如下,使用 οnkeyup"this.valuethis.value.replace(/\D/g,‘’)"限制只能输入数字,输入数字没有问题,使用input实现数字不以0开头,也只能是…...

26考研——数据的表示和运算_整数和实数的表示(2)
408答疑 文章目录 二、整数和实数的表示1、整数的表示1.1、无符号整数的表示1.2、有符号整数的表示1.3、C 语言中的整数类型及类型转换1.3.1、C 语言中的整型数据类型1.3.2、有符号数和无符号数的转换1.3.3、不同字长整数之间的转换 2、实数的表示2.1、浮点数的相关概念2.2、浮…...

用 Lazarus IDE 写一个邮件客户端软件,能收发邮件,编写邮件
下面是一个使用Lazarus IDE开发的基本邮件客户端实现方案,包含收发邮件和编写邮件的核心功能。我们将使用Synapse库(跨平台的网络通信库)来处理邮件协议。 步骤1:安装依赖 安装Synapse库: 下载地址:https:…...

关于智能体API参考接口
关于智能体在Flask的源码:请求体(在payload里的是请求体)、请求头(在headers里的i局势请求头)。 我的例子: 我的疑问:为什么没按Coze官方API文档格式,在Apifox里发POST请求却能收到回复? 1. 你…...

命令行运行python程序报错 ImportError: /lib/x86_64-linux-gnu/libstdc++.so.6
命令行运行python程序报错 ImportError: /lib/x86_64-linux-gnu/libstdc.so.6 ImportError: /lib/x86_64-linux-gnu/libstdc.so.6: version GLIBCXX_3.4.29’ not found (required by /home/zitong/miniconda3/envs/torch112/lib/python3.9/site-packages/scipy/spatial/_ckdt…...