无人机避障——感知部分(Ubuntu 20.04 复现Vins Fusion跑数据集)胎教级教程
硬件环境:NVIDIA Jeston Orin nx
系统:Ubuntu 20.04
任务:跑通 EuRoC MAV Dataset 数据集
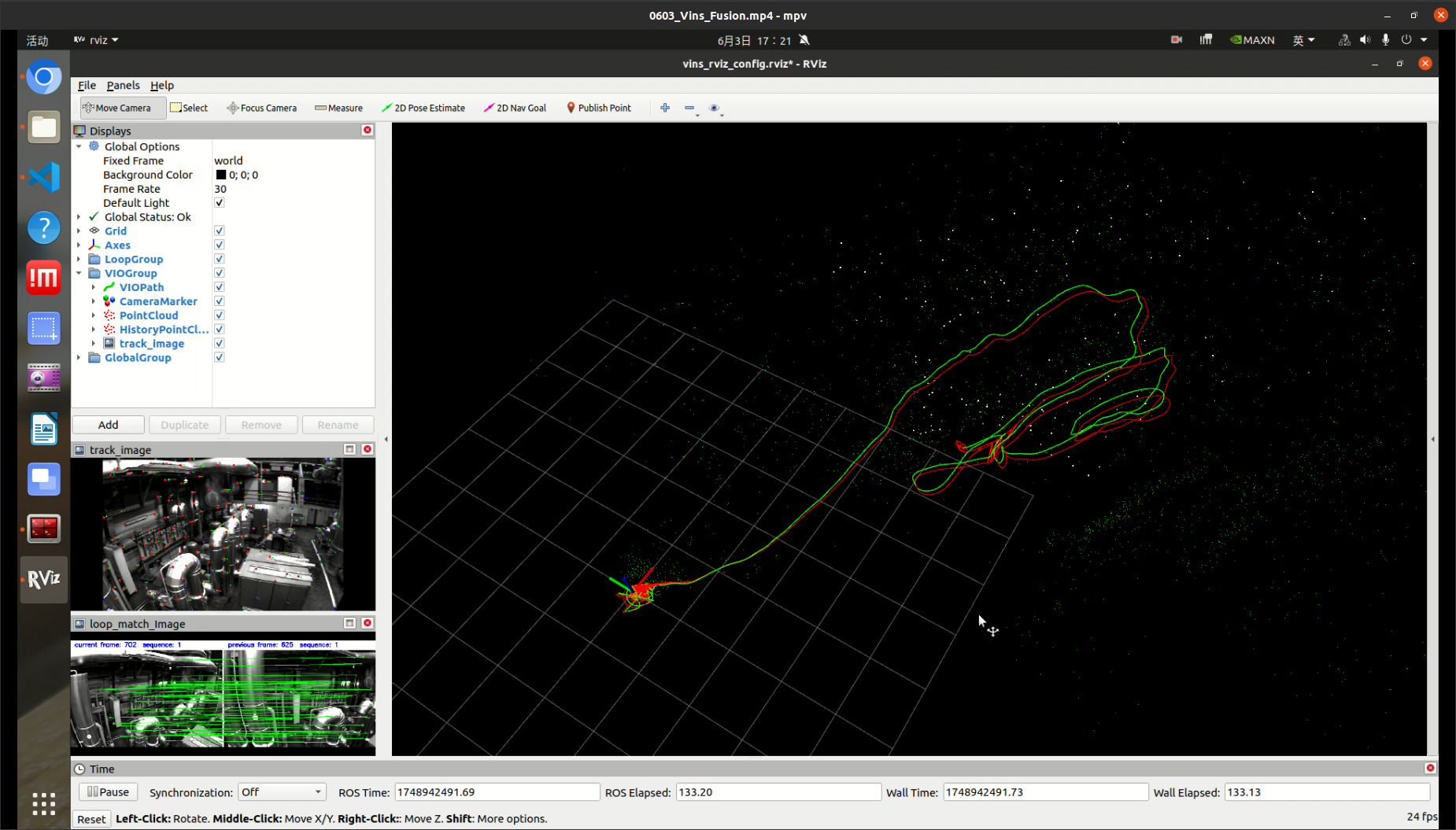
展示结果:
编译Vins Fusion
创建工作空间vins_ws
# 创建目录结构
mkdir -p ~/vins_ws/srccd ~/vins_ws/src# 初始化工作空间(生成 CMakeLists.txt)
catkin_init_workspace# 克隆官网的代码
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Fusion.gitcd ..catkin_make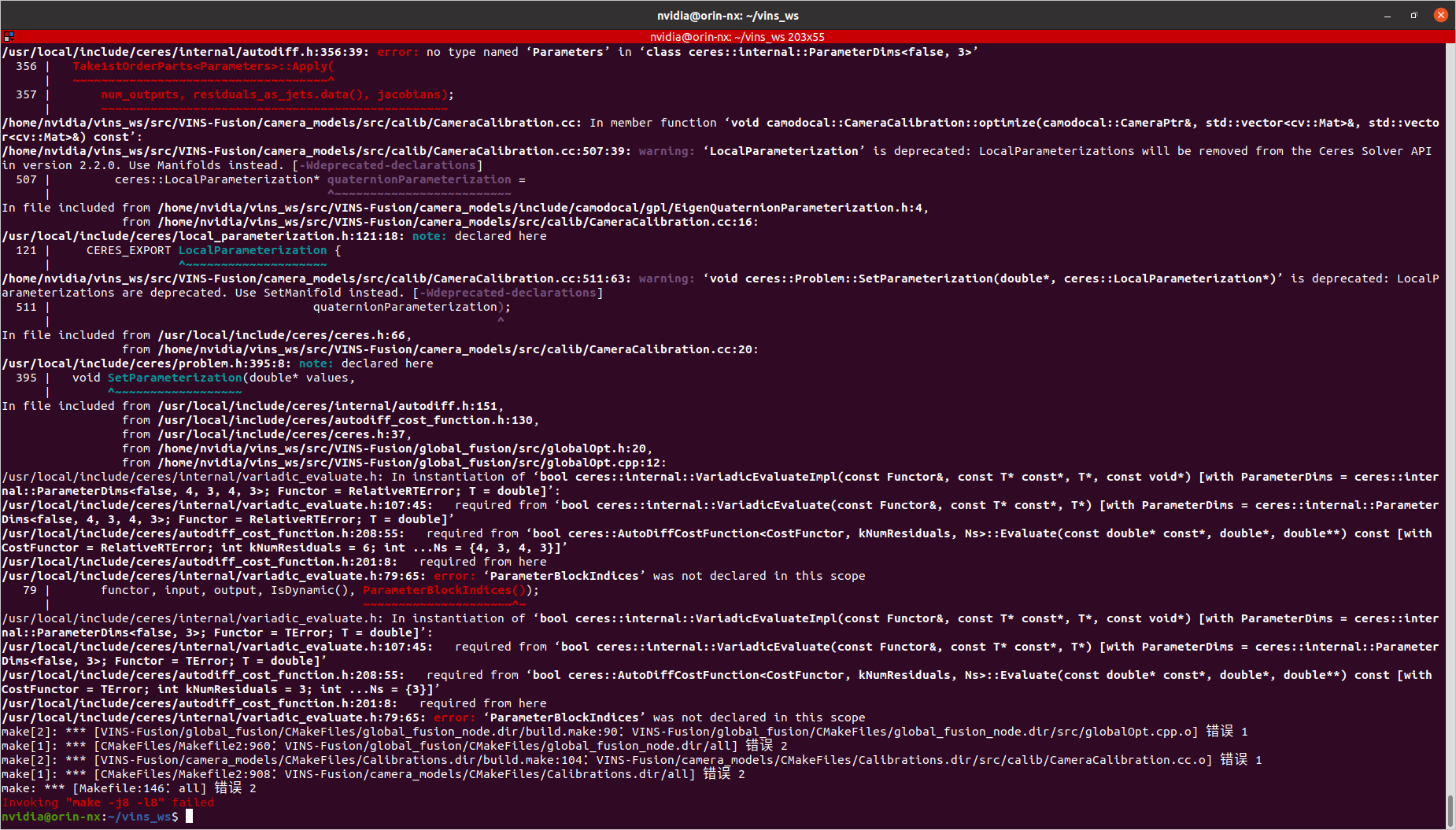
遇到了不少报错,参考以下内容可以基本解决前期的编译问题。
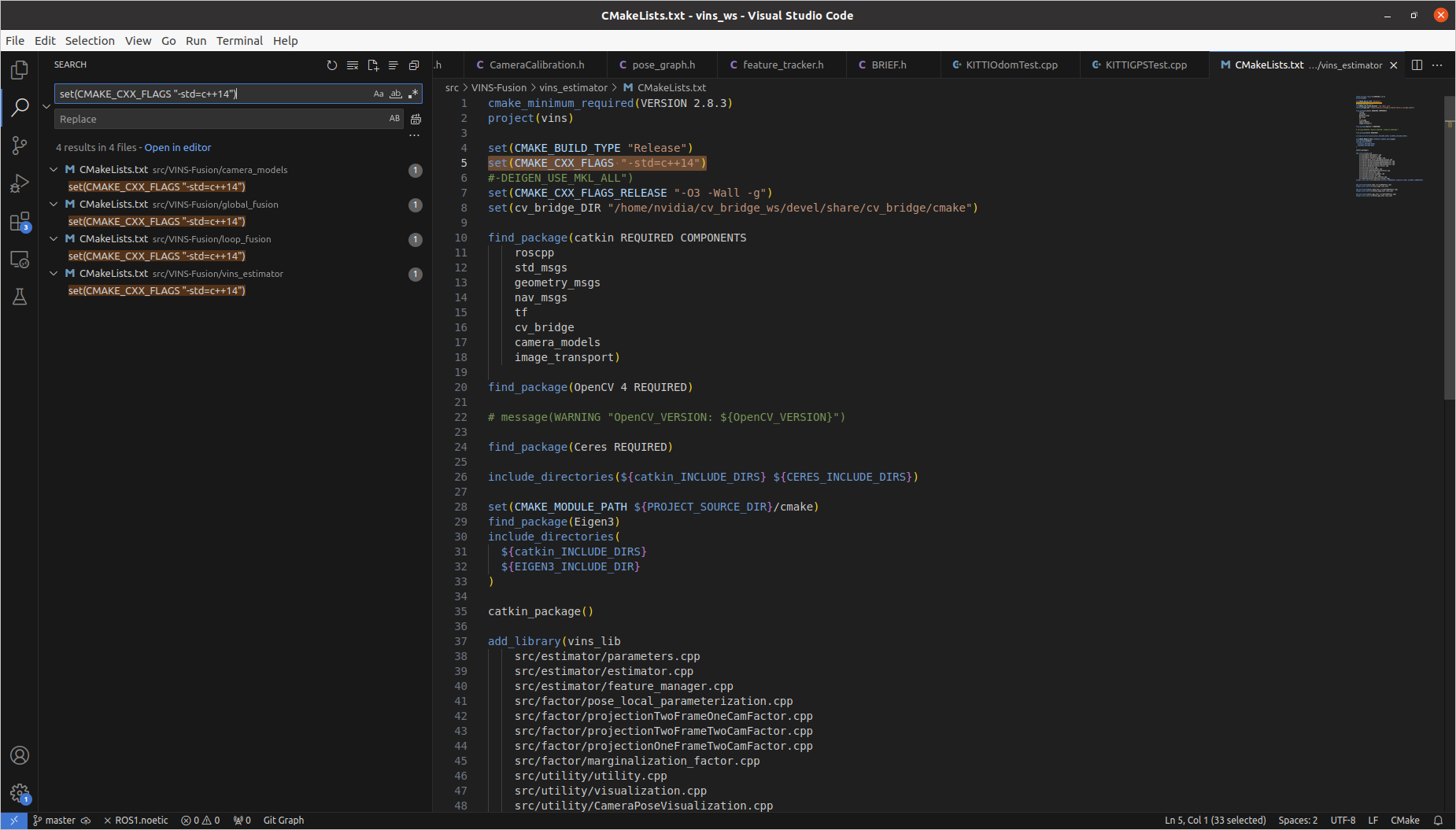
将c++11 修改为c++14
用VScode搜索set(CMAKE_CXX_FLAGS "-std=c++11"),全部替换为set(CMAKE_CXX_FLAGS "-std=c++14"),图中我已经全部替换过了。
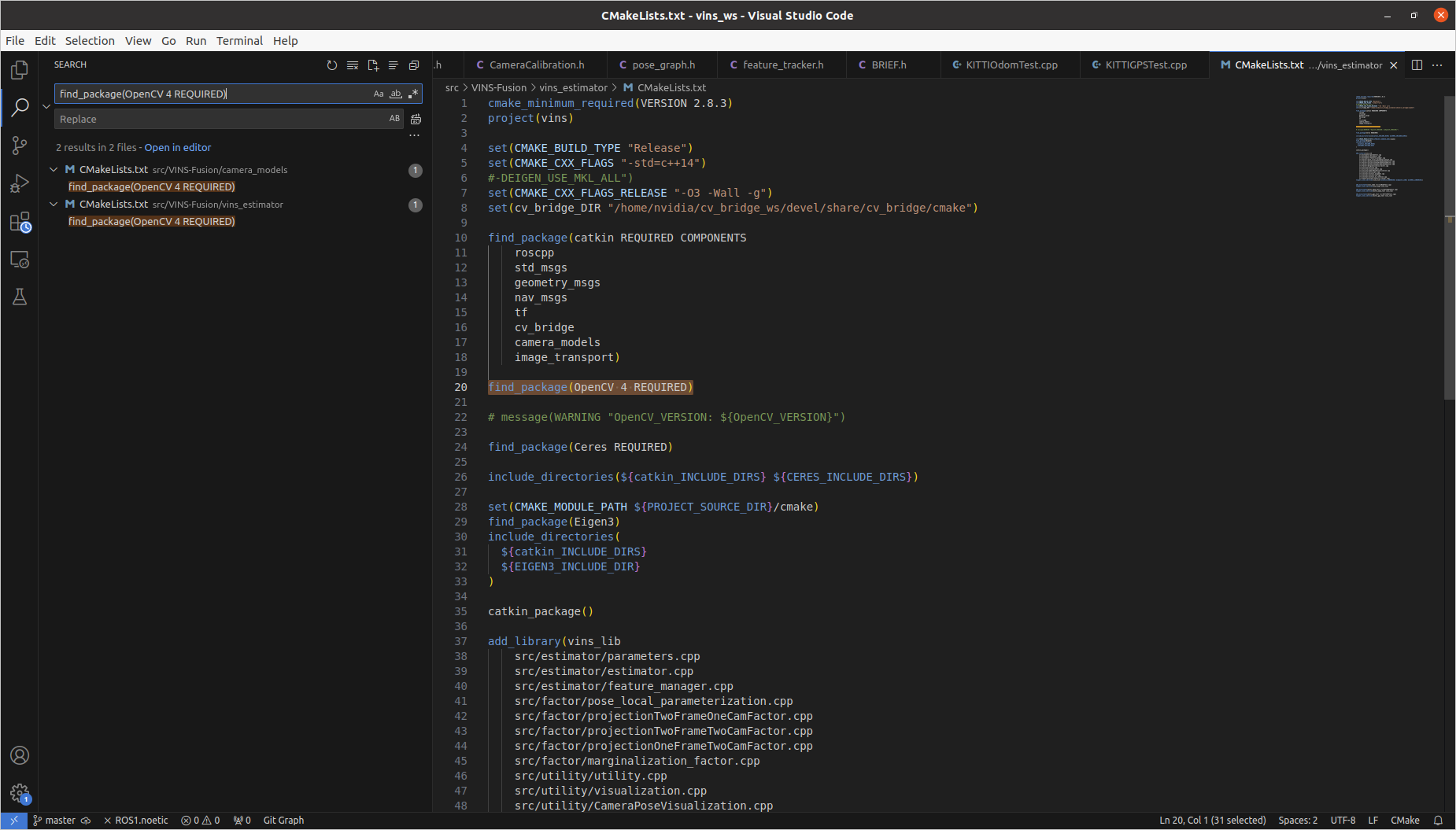
指定find_package中的OpenCV的版本
用VScode搜索find_package(OpenCV REQUIRED),全部替换为find_package(OpenCV 4 REQUIRED),图中我已经全部替换过了。
添加头文件
camera_models>include>camodocal>chessboard>Chessboard.h中添加
#include <opencv2/imgproc/types_c.h>
#include <opencv2/calib3d/calib3d_c.h>在以下文件:
camera_models/include/camodocal/calib/CameraCalibration.h
loop_fusion/src/pose_graph.h
vins_estimator/src/featureTracker/feature_tracker.h
loop_fusion/src/ThirdParty/DVision/BRIEF.h
加入以下的头文件:
#include <opencv2/imgproc/types_c.h>
#include <opencv2/imgproc/imgproc_c.h>修改报错文件
在以下文件
VINS-Fusion/vins_estimator/src/KITTIGPSTest.cpp
VINS-Fusion/vins_estimator/src/KITTIOdomTest.cpp
其中,将 CV_LOAD_IMAGE_GRAYSCALE修改为cv::IMREAD_GRAYSCALE,同样的直接用VScode搜索 CV_LOAD_IMAGE_GRAYSCALE将其替换即可。
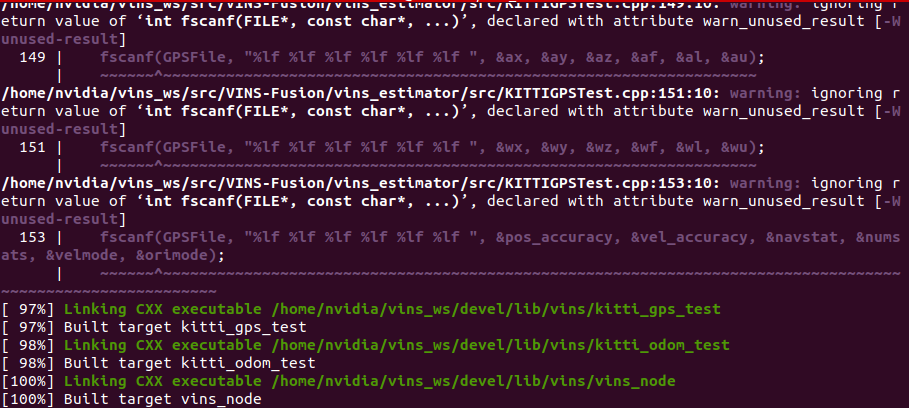
然后编译
usr/bin/ld: warning: libopencv_video.so.4.2, needed by /home/nvidia/vins_ws/devel/lib/libvins_lib.so, may conflict with libopencv_video.so.405
/usr/bin/ld: warning: libopencv_imgcodecs.so.405, needed by /home/nvidia/vins_ws/devel/lib/libvins_lib.so, may conflict with libopencv_imgcodecs.so.4.2
/usr/bin/ld: warning: libopencv_core.so.405, needed by /usr/local/lib/libopencv_video.so.4.5.5, may conflict with libopencv_core.so.4.2
/usr/bin/ld: warning: libopencv_video.so.4.2, needed by /home/nvidia/vins_ws/devel/lib/libvins_lib.so, may conflict with libopencv_video.so.405
/usr/bin/ld: warning: libopencv_imgcodecs.so.405, needed by /home/nvidia/vins_ws/devel/lib/libvins_lib.so, may conflict with libopencv_imgcodecs.so.4.2
/usr/bin/ld: warning: libopencv_core.so.405, needed by /usr/local/lib/libopencv_video.so.4.5.5, may conflict with libopencv_core.so.4.2
[ 98%] Built target kitti_odom_test
[ 98%] Built target kitti_gps_test
[100%] Linking CXX executable /home/nvidia/vins_ws/devel/lib/vins/vins_node
/usr/bin/ld: warning: libopencv_video.so.4.2, needed by /home/nvidia/vins_ws/devel/lib/libvins_lib.so, may conflict with libopencv_video.so.405
/usr/bin/ld: warning: libopencv_core.so.405, needed by /usr/local/lib/libopencv_video.so.4.5.5, may conflict with libopencv_core.so.4.2编译虽然通过了,但是有警告,这里是因为在链接过程中存在 OpenCV 库版本冲突。系统检测到两个不同版本的 OpenCV 库(4.2 和 4.5.5)被同时链接 。
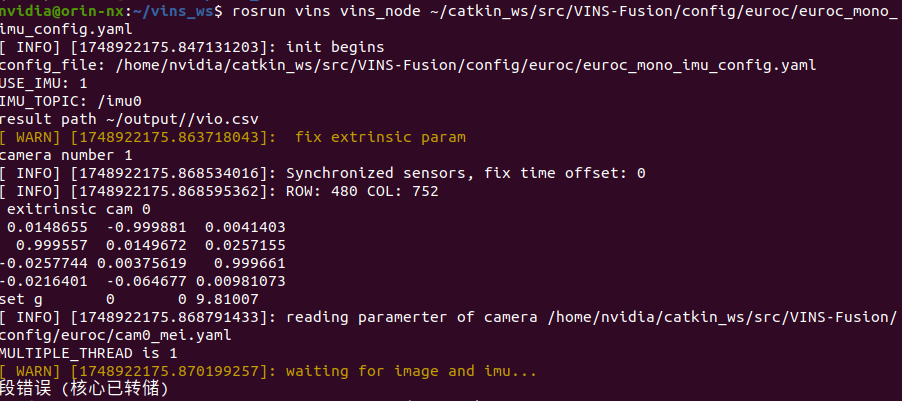
段错误
如果不解决上述OpenCV 库版本冲突问题,后续运行vins_node将会出现段错误:
解决OpenCV 库版本冲突问题。
最好的解决方法就是全部统一成一个OpenCV 4.5.5。
# 卸载通过 apt 安装的 OpenCV
sudo apt purge -y '^libopencv.*' '^opencv.*'# 清除残留配置文件
sudo rm -rf /usr/local/include/opencv* /usr/local/lib/libopencv* /usr/local/share/opencv* \/usr/include/opencv* /usr/lib/x86_64-linux-gnu/libopencv* \~/.local/lib/python*/*/site-packages/cv2*# 更新系统库缓存
sudo ldconfig# 更新下
sudo apt-get updatesudo apt-get upgrade# 下载Opencv 4.5.5源码
wget https://github.com/opencv/opencv/archive/refs/tags/4.5.5.zip# 解压
unzip opencv-4.5.5.zip # 安装依赖
sudo apt-get install cmake
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg-dev libswscale-dev libtiff5-dev
sudo apt-get install libgtk2.0-dev
sudo apt-get install pkg-config# 编译安装
mkdir buildcd buildcmake -D WITH_TBB=ON -D WITH_EIGEN=ON -D OPENCV_GENERATE_PKGCONFIG=ON -D BUILD_DOCS=ON -D BUILD_TESTS=OFF -D BUILD_PERF_TESTS=OFF -D BUILD_EXAMPLES=OFF -D WITH_OPENCL=OFF -D WITH_CUDA=OFF -D BUILD_opencv_gpu=OFF -D BUILD_opencv_gpuarithm=OFF -D BUILD_opencv_gpubgsegm=O -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local ..make -j8
sudo make install# 环境配置
sudo gedit /etc/ld.so.conf.d/opencv.conf# 添加以下路径
/usr/local/lib# 保存后,终端执行
sudo ldconfig # 更新路径
sudo gedit /etc/bash.bashrc# 最后添加
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH# 保存后,终端执行
source /etc/bash.bashrc
sudo updatedb然后编译Vins Fusion 发现没有 cv_bridge
ither need to install the package with the same name or change your environment so that it can be found.
CMake Error at /opt/ros/noetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):Could not find a package configuration file provided by "cv_bridge" withany of the following names:cv_bridgeConfig.cmakecv_bridge-config.cmakeAdd the installation prefix of "cv_bridge" to CMAKE_PREFIX_PATH or set"cv_bridge_DIR" to a directory containing one of the above files. If"cv_bridge" provides a separate development package or SDK, be sure it hasbeen installed.
Call Stack (most recent call first):VINS-Fusion/loop_fusion/CMakeLists.txt:9 (find_package)-- Configuring incomplete, errors occurred!
See also "/home/nvidia/vins_ws/build/CMakeFiles/CMakeOutput.log".
See also "/home/nvidia/vins_ws/build/CMakeFiles/CMakeError.log".
Invoking "cmake" failed如果用这条ROS相关的安装cv_bridge的指令还会报错:
# 安装 ROS Noetic 的 cv_bridge
sudo apt-get install ros-noetic-cv-bridge 原因是系统安装了OpenCV 4.5.5,但通过ROS官方源安装的cv_bridge是针对OpenCV 4.2编译的。而我们的代码需要OpenCV 4.5.5,因此可能需要重新编译cv_bridge以匹配我们安装的OpenCV版本。
重新编译cv_bridge以匹配OpenCV 4.5.5版本
# 1. 卸载旧版本(重要!)
sudo apt remove ros-noetic-cv-bridge# 2. 创建工作空间
mkdir -p ~/cv_bridge_ws/src
cd ~/cv_bridge_ws/src# 3. 获取vision_opencv源码(noetic分支)
git clone -b noetic https://github.com/ros-perception/vision_opencv.git# 4. 关键:修改编译配置
sed -i 's/find_package(OpenCV 3 REQUIRED)/find_package(OpenCV 4.5 REQUIRED)/g' vision_opencv/cv_bridge/CMakeLists.txt# 5. 编译安装
cd ~/cv_bridge_ws
catkin config -DCMAKE_BUILD_TYPE=Release -DOpenCV_DIR=/path/to/opencv4.5.5/build
catkin build cv_bridge# 6. 添加环境变量(永久生效)
echo "source ~/cv_bridge_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc如果安装完还是报错:
# 查找 cv_bridge 的实际安装位置
find / -name "*cv_bridge*Config.cmake" 2>/dev/null得到下面这个路径
/home/nvidia/cv_bridge_ws/devel/share/cv_bridge/cmake/cv_bridgeConfig.cmake
在VINS-Fusion的CMakeLists.txt中(具体是loop_fusion/CMakeLists.txt)的find_package(cv_bridge)之前加入:
set(cv_bridge_DIR "/home/nvidia/cv_bridge_ws/devel/share/cv_bridge/cmake")最后编译成功,没有warning也没有报错:
最后结果:
roslaunch vins vins_rviz.launchrosrun vins vins_node src/VINS-Fusion/config/euroc/euroc_stereo_imu_config.yamlrosrun loop_fusion loop_fusion_node src/VINS-Fusion/config/euroc/euroc_stereo_imu_config.yaml# 数据集去Vins-Fusion github官网上进行下载
rosbag play MH_01_easy.bag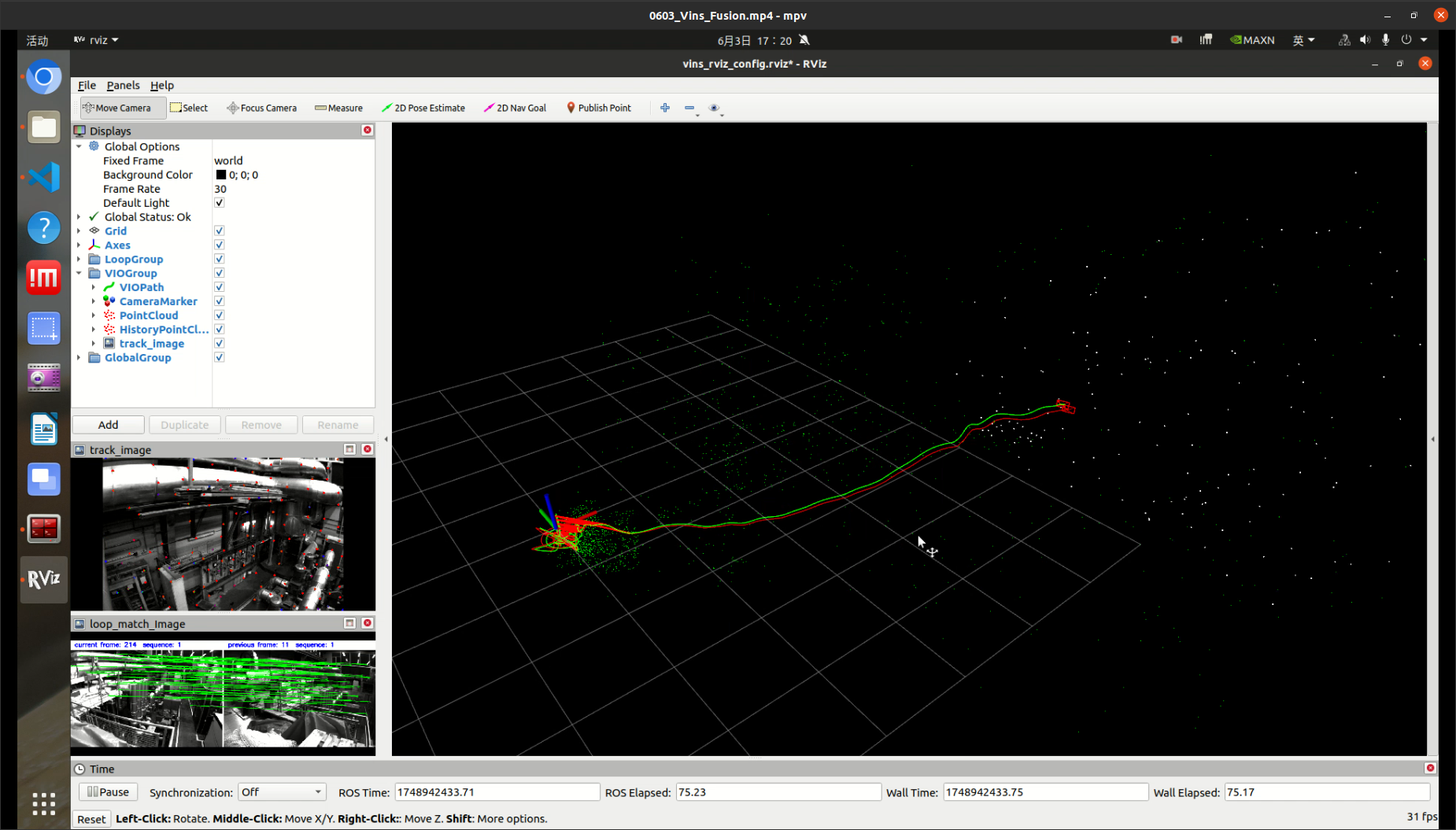
相关文章:
无人机避障——感知部分(Ubuntu 20.04 复现Vins Fusion跑数据集)胎教级教程
硬件环境:NVIDIA Jeston Orin nx 系统:Ubuntu 20.04 任务:跑通 EuRoC MAV Dataset 数据集 展示结果: 编译Vins Fusion 创建工作空间vins_ws # 创建目录结构 mkdir -p ~/vins_ws/srccd ~/vins_ws/src# 初始化工作空间…...

人工智能--大型语言模型的存储
好的,我现在需要回答用户关于GGUF文件和safetensors文件后缀的差别的问题。首先,我得先确认这两个文件格式的具体应用场景和它们各自的优缺点。用户可能是在处理大模型时遇到了这两种文件格式,想了解它们的区别以便正确使用。 首先ÿ…...

OD 算法题 B卷【删除字符串中出现次数最少的字符】
文章目录 删除字符串中出现次数最少的字符 删除字符串中出现次数最少的字符 实现删除字符串中出现次数最少的字符,若(最少的)有多个字符出现次数一样,则都删除。输出删除后的字符串,其他字符保持原有顺序;…...
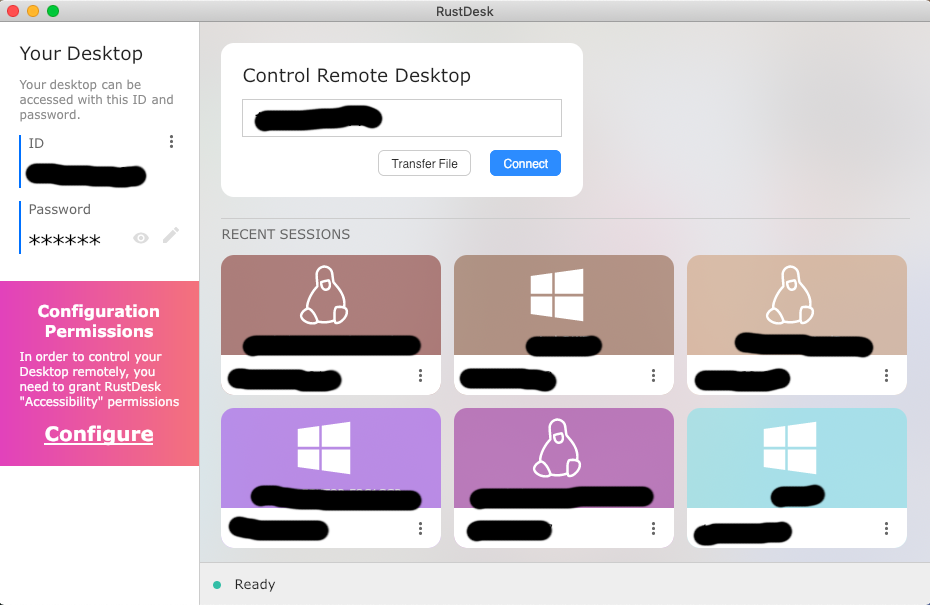
如何安装并使用RustDesk
参考: 搭建 RustDesk Server:打造属于自己的远程控制系统,替代 TeamViewer 和 ToDesk! 向日葵、ToDesk再见!自己动手,自建RustDesk远程服务器真香! 通俗易懂:RustDesk Server的搭…...
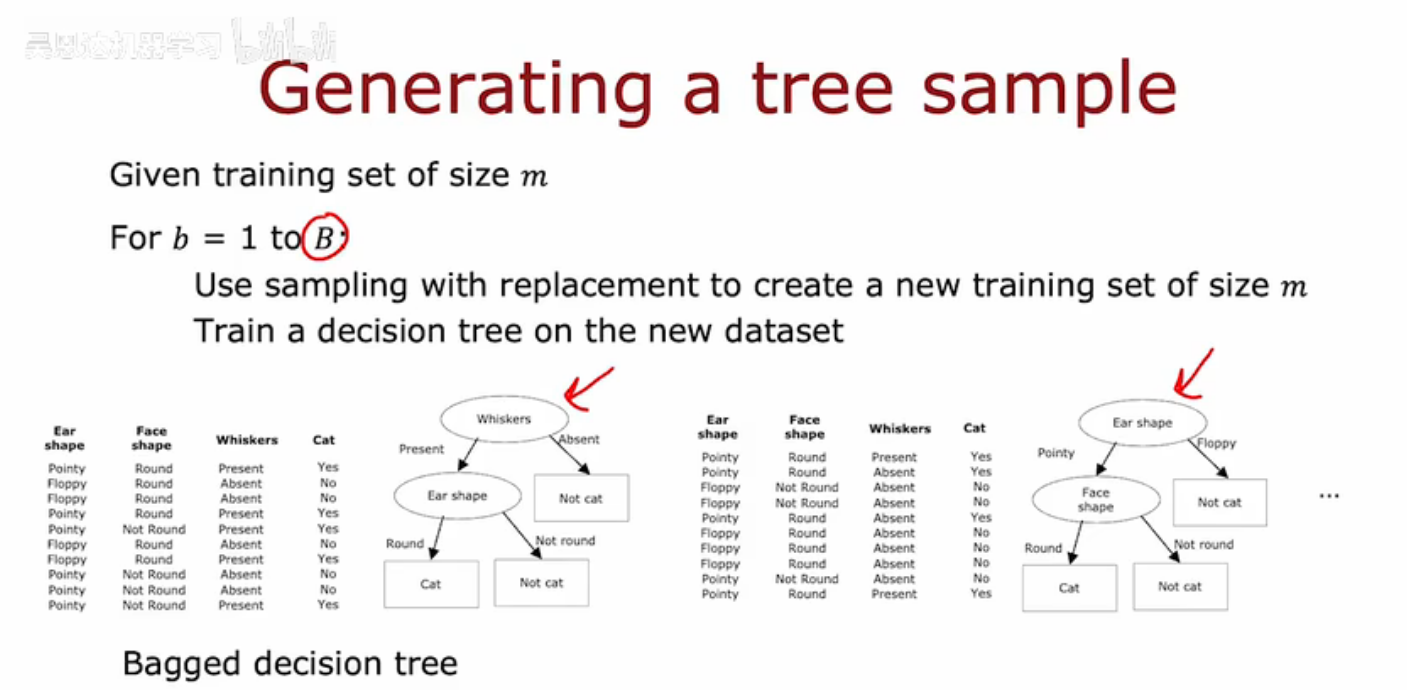
机器学习——随机森林算法
随机森林算法是一种强大的树集成算法,比使用单个决策树效果要好得多。 以下是生成树集成的方法:假设有一个大小为m的训练集,然后对于b1到B,所以执行B次,可以使用有放回抽样来创建一个大小为m的训练集。所以如果有10个…...
【从零学习JVM|第二篇】字节码文件
前言: 通过了解字节码文件可以帮助我们更容易的理解JVM的工作原理,所以接下来,我们来介绍一下字节码文件。 目录 前言: 正确的打开字节码文件 字节码文件组成 1. 魔数(Magic Number) 2. 版本号&…...

Fractal Generative Models论文阅读笔记与代码分析
何恺明分型模型这篇文章在二月底上传到arXiv预出版网站到现在已经过了三个月,当时我也听说这篇文章时感觉是大有可为,但是几个月不知道忙啥了,可能错过很多机会,但是亡羊补牢嘛,而且截至目前,该文章应该也还…...

软件测试—学习Day11
今天学习下兼容性 1.App兼容性常见问题 以下是关于 App 兼容性问题的常见举例,涵盖界面展示、操作逻辑、性能差异三大维度,涉及不同系统、设备及网络环境的兼容性场景: 一、界面展示问题 界面展示兼容性问题主要由操作系统版本差异、屏幕…...
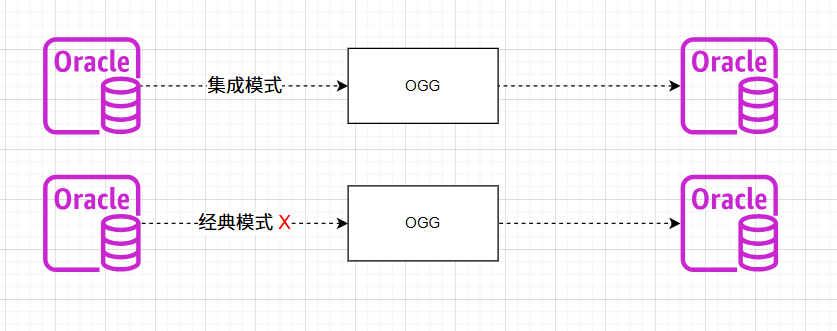
OGG-01635 OGG-15149 centos服务器远程抽取AIX oracle11.2.0.4版本
背景描述 有一套ogg远程抽取的环境,源端是AIX7.1环境的oracle 11.2.0.4版本的数据库,中间是OGG抽取服务器,目标端是centos 7.9环境的oracle 19c。 采用集成模式远程抽取源端数据正常,但是经典模式远程抽取源数据的时候抽取进程启…...
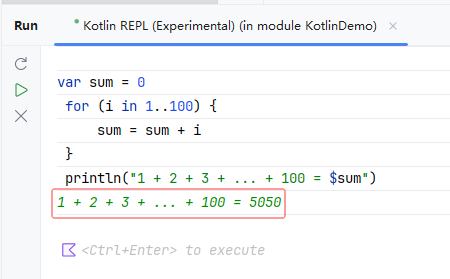
Kotlin REPL初探
文章目录 1. Kotlin REPL 简介2. 在命令行中玩Kotlin REPL2.1 下载Kotlin编译器压缩包2.2 安装配置Kotlin编译器2.3 启动Kotlin交互式环境2.4 在命令行玩Kotlin REPL 3. 在IDEA里玩Kotlin REPL3.1 打开Kotlin REPL窗口3.2 在Kotlin REPL窗口玩代码 4. Kotlin REPL 的优势 1. Ko…...
git引用概念(git reference,git ref)(简化对复杂SHA-1哈希值的管理)(分支引用、标签引用、HEAD引用、远程引用、特殊引用)
文章目录 **引用的本质**1. **引用是文件**2. **引用的简化作用** **引用的类型**1. **分支引用(Branch References)**2. **标签引用(Tag References)**3. **HEAD 引用**4. **远程引用(Remote References)*…...
Github 2025-06-07 Rust开源项目日报Top10
根据Github Trendings的统计,今日(2025-06-07统计)共有10个项目上榜。根据开发语言中项目的数量,汇总情况如下: 开发语言项目数量Rust项目10Dart项目1TypeScript项目1RustDesk: 用Rust编写的开源远程桌面软件 创建周期:1218 天开发语言:Rust, Dart协议类型:GNU Affero Ge…...

gorm 配置数据库
介绍 GORM 是 Go 语言中最流行的 ORM(对象关系映射)库之一,基于数据库操作的封装,提供类似 Django ORM / SQLAlchemy 的开发体验。 特性描述支持多种数据库MySQL、PostgreSQL、SQLite、SQL Server、ClickHouse 等自动迁移自动根…...
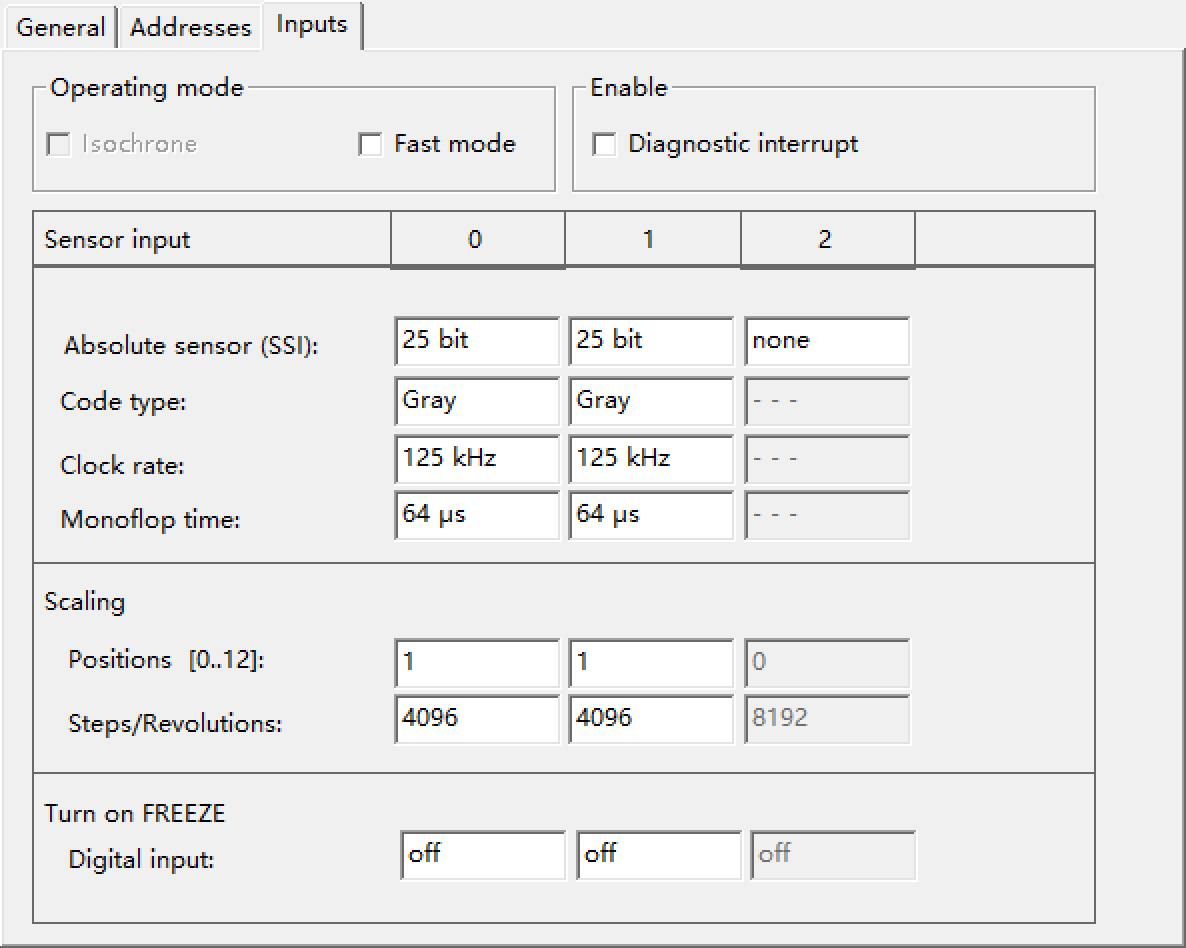
自动化立体仓库堆垛机控制系统STEP7 OB1功能块
1、堆垛机控制系统STEP7硬件组态如下图 CPU CPU 314C-2 PN/DP 6ES7 314-6EH04-0AB0 SM 338 POS-INPUT AO2x12Bit 6ES7 332-5HB01-0AB0 2、堆垛机控制系统STEP7内部变量 前进HMI M 0.0 BOOL 后退HMI M 0.1 BOOL 上升HMI M 0.2 B…...
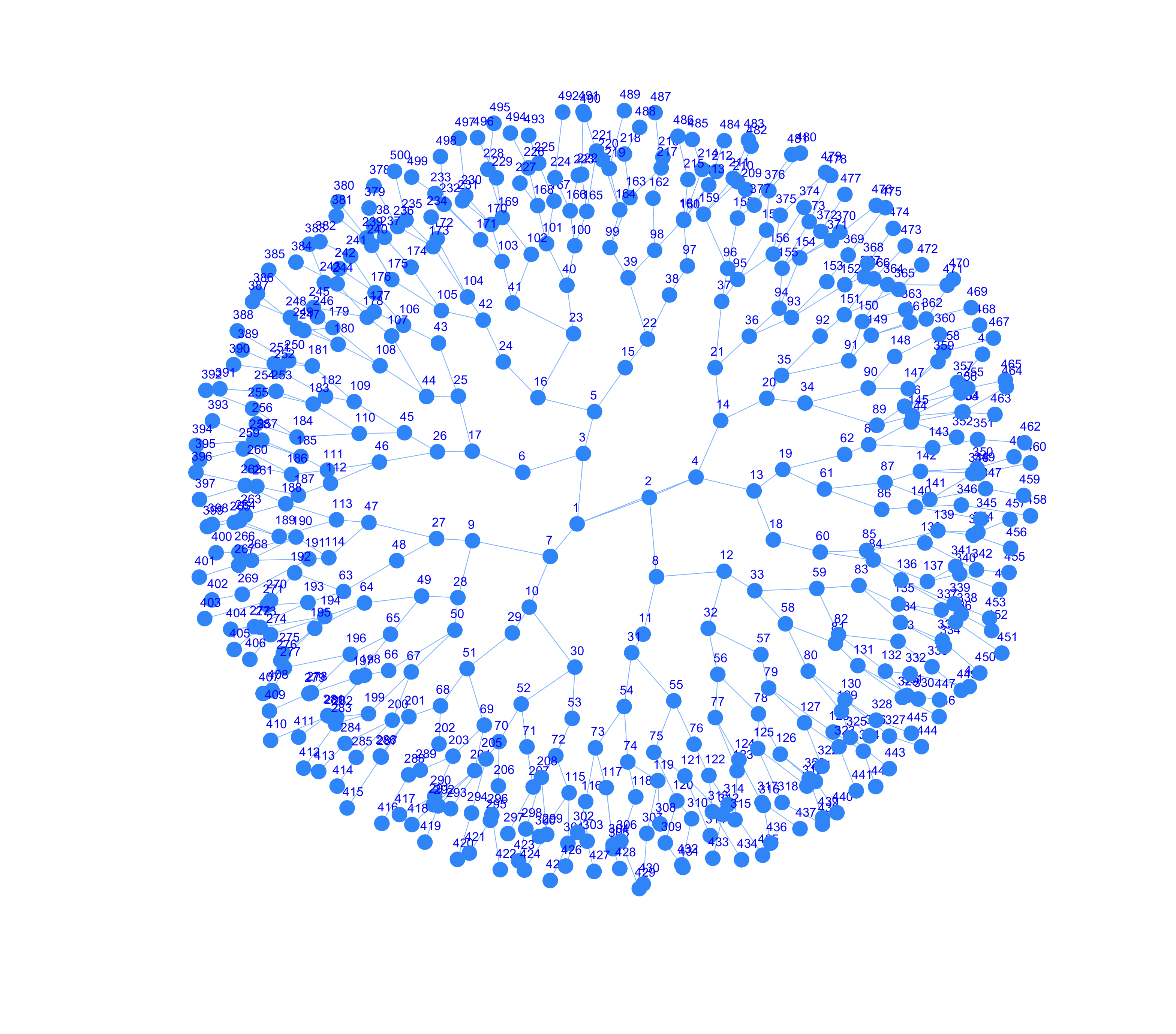
MATLAB生成大规模无线通信网络拓扑(任意节点数量)
功能: 生成任意节点数量的网络拓扑,符合现实世界节点空间分布和连接规律 效果: 30节点: 100节点: 500节点: 程序: %创建时间:2025年6月8日 %zhouzhichao %自然生长出n节点的网络% …...
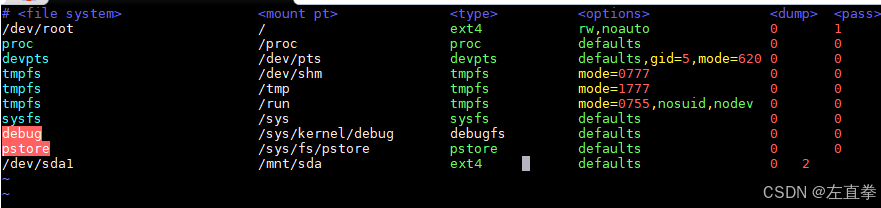
ubuntu 20.04挂载固态硬盘
我们有个工控机,其操作系统是ubuntu 20.04。可以接入一个固态硬盘。将固态硬盘插好后,就要进行挂载。在AI的指导下,过程并不顺利。记录如下: 1、检查硬盘是否被识别 安装好硬盘后,运行以下命令来检查Linux系统是否…...

【AI教我写网站-ECG datacenter】
阶段性总结:后端用户管理基础 在项目管理和协作中,清晰地阐述“为什么做”比“怎么做”更能凝聚共识和提供方向。我们不仅要理解技术实现,更要明白其背后的动机和意义。 让我们重新回顾并总结我们到目前为止的工作,这次会更侧重…...

2. Web网络基础 - 协议端口
深入解析协议端口与netstat命令:网络工程师的实战指南 在网络通信中,协议端口是服务访问的门户。本文将全面解析端口概念,并通过netstat命令实战演示如何监控网络连接状态。 一、协议端口核心知识解析 1. 端口号的本质与分类 端口范围类型说…...

PC与Windows远程连接与串流:方案简介(ZeroTier + Parsec、Moonlight + Sunshine、网易UU远程)
简介 在远程办公、云游戏、家用 NAS 串流、图形远程渲染等需求增长的背景下,越来越多用户开始寻找低延迟、高画质、跨网络可用的远程连接方案。今天这篇文章将深度分析三种目前在玩家圈和远程办公中都非常流行的组合方案: 🟢 ZeroTier Pars…...
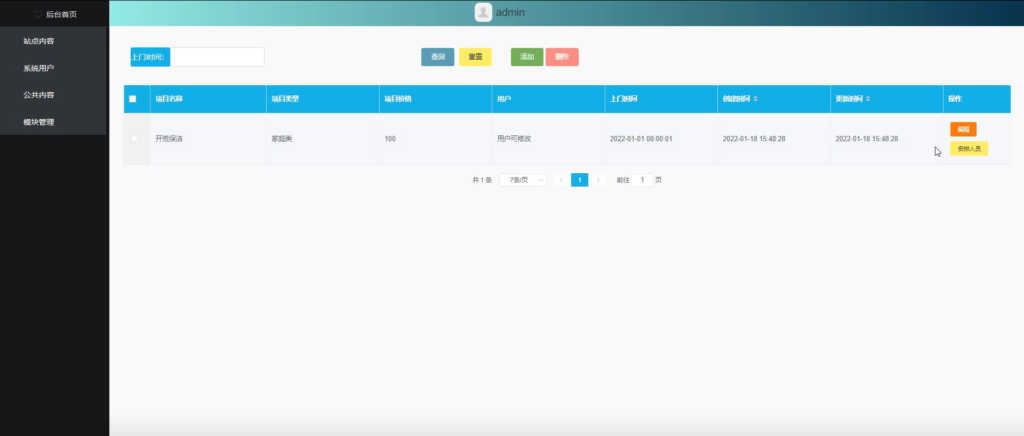
SpringBoot+MySQL家政服务平台 设计开发
概述 基于SpringBootMySQL开发的家政服务平台完整项目,该系统实现了用户预约、服务管理、订单统计等核心功能,采用主流技术栈开发,代码规范且易于二次开发。 主要内容 系统功能架构 本系统采用前后端分离架构,前端提供用户交互…...

浏览器兼容-polyfill-本地服务-优化
babel和webpack结合 npx babel src --out-dir dist --presetsbabel/preset-env 这是把src下面的东西都用babel转化一下 webpack可以和babel结合使用,首先下载一个这东西: npm install babel-loader -D webpack配置: const path requir…...
c++ decltype关键字
decltype为类型推导关键字。 示例代码: // decltype也可用于函数模板编程: template<typename T, typename U> auto add(T t, U u) -> decltype(t u) {return t u; }// decltype推导函数返回类型 auto doubleNumFunc(int x) -> decltype(x * 2) {ret…...

分享今天做的力扣SQL题
其实做之前就打算分享的,但是做完又不想分享了。。。结果没几分钟,还是,写一下吧。我就当各位是监督我的。 说一下,这是第一天做SQL题,虽然我也是软件工程专业,但是学的本来就不好,又忘了个差不…...

全球化2.0|云轴科技ZStack助力香港服务机构VMware替代
香港一家大型社会服务机构长期致力于为公众提供支持与服务,是本地具有代表性的社会服务组织,在香港设有数十个服务中心。为应对VMware订阅模式带来的成本上升和硬件资源受限等问题,该机构决定采用云轴科技ZStack Cloud云平台替代VMware虚拟化…...
Selenium自动化测试工具安装和使用(PyCharm)
一,了解驱动 手工测试我们很了解,假设我要测试百度首页是否正常,只需要鼠标点击打开浏览器,然后输入百度网址即可 但是对于程序来说,打开浏览器,需要用到对应的驱动,就好比你给电脑装了个外置…...
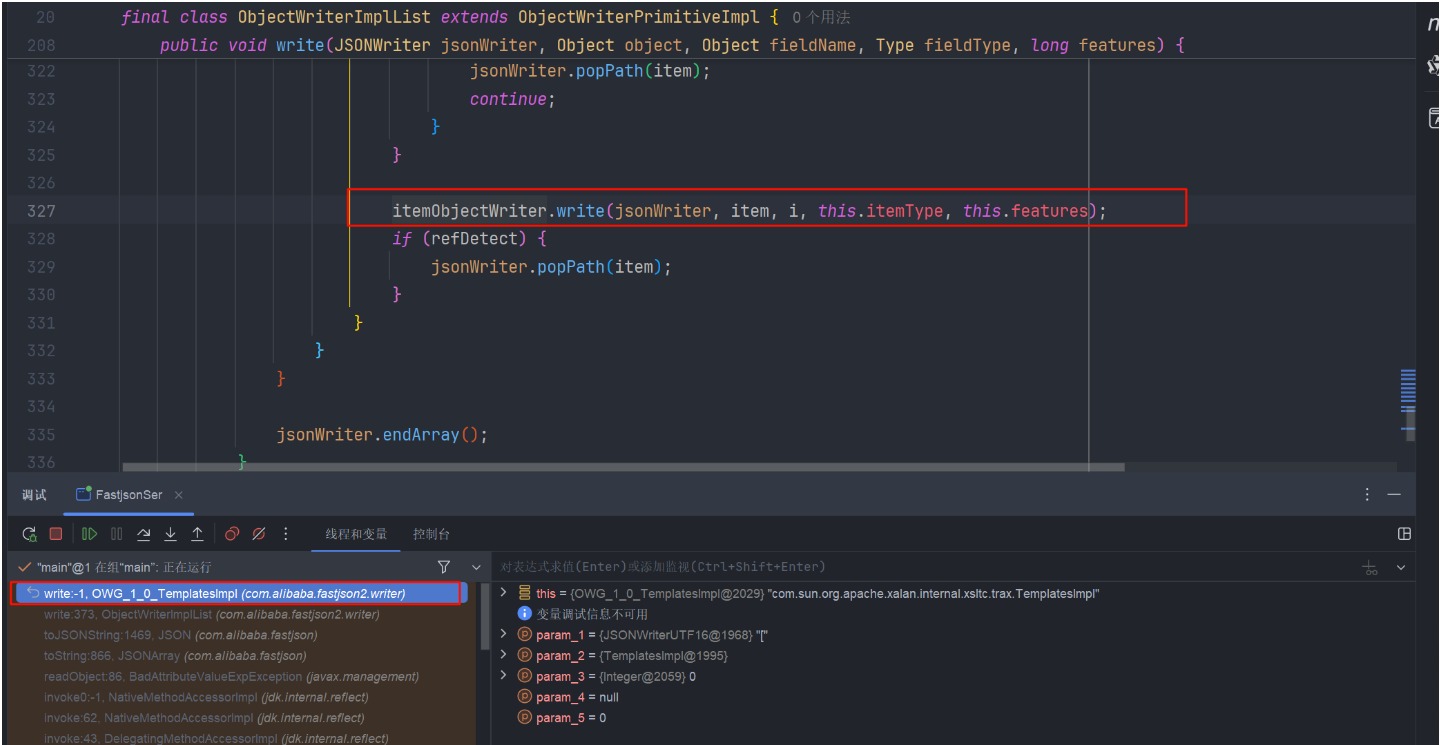
【网络安全】fastjson原生链分析
fastjson 原生链 前言 说起 fastjson 反序列化,大部分的利用都是从 type 把 json 串解析为 java 对象,在构造方法和 setter、getter 方法中,做一些文件或者命令执行的操作。当然,在 fastjson 的依赖包中,也存在着像 …...
【人工智能 | 项目开发】Python Flask实现本地AI大模型可视化界面
文末获取项目源码。 文章目录 项目背景项目结构app.py(后端服务)index.html(前端界面)项目运行项目图示项目源码项目背景 随着人工智能技术的快速发展,大语言模型在智能交互领域展现出巨大潜力。本项目基于 Qwen3-1.7B 模型,搭建一个轻量化的智能聊天助手,旨在为用户提…...

uni-app 项目支持 vue 3.0 详解及版本升级方案?
uni-app 支持 Vue 3.0 详解及升级方案 一、uni-app 对 Vue 3.0 的支持现状 uni-app 从 3.0 版本 开始支持 Vue 3.0,主要变化包括: 核心框架升级: 基于 Vue 3.0 的 Composition API 和 Options API 双模式支持提供 vueuse/core 等组合式 API…...

SpringBoot3中使用虚拟线程的详细过程
在 Spring Boot 3 中使用 Java 21 的虚拟线程(Virtual Threads)可以显著提升 I/O 密集型应用的并发能力。以下是详细实现步骤: 1. 环境准备 JDK 21:确保安装 JDK 21 或更高版本Spring Boot 3.2:最低要求(p…...

达梦使用存储过程实现删除重复记录、判断并添加主键和自增列的逻辑
在达梦数据库中,要确保主键的唯一性约束,可以在存储过程的最前面添加删除重复记录的逻辑。以下是一个完整的存储过程,包含删除重复记录、判断并添加主键和自增列的逻辑: 存储过程示例 -- 切换到指定模式;schema_name 是目标模…...