大陆4D毫米波雷达ARS548调试
本文介绍了大陆ARS548毫米波雷达的调试与测试流程,主要包括以下内容:
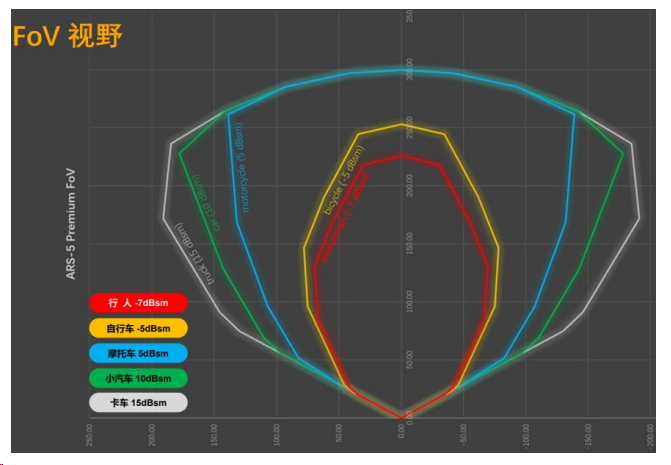
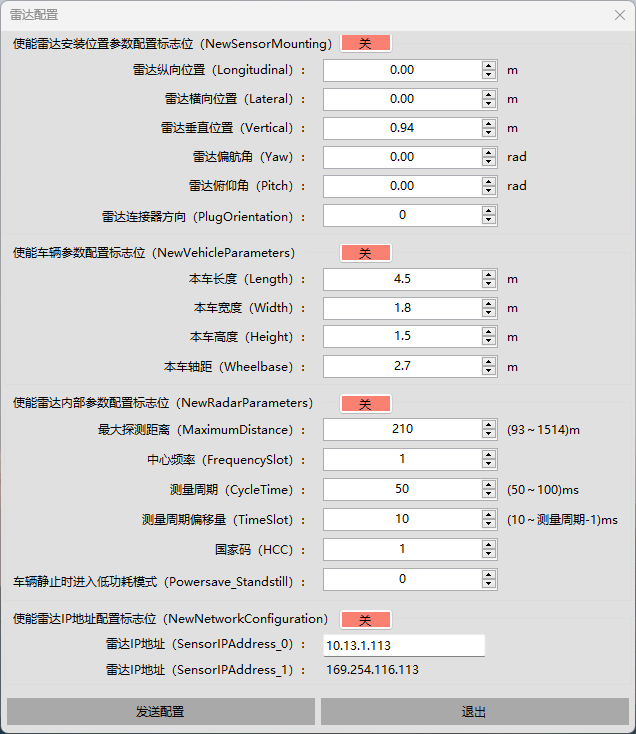
设备参数:最大检测距离301m(可调93-1514m),支持gPTP时间同步。
接线调试:
Windows需使用USB-RJ45转换器 Linux可直接连接网线
上位机测试:
需注意Windows Intel网卡不兼容点云数据显示。
Wireshark配置:
需加载对应固件版本的Lua插件 当前实验室使用5.48.4版本
VLAN配置:
提供临时和永久两种修改方式 需将VLAN ID设为19以接收组播数据
时间同步:
使用linuxptp工具实现gPTP同步 需配置主从时钟关系
ROS集成:
需将解析包放入ROS工作空间编译 运行前需确保网络配置正确 文末提供了详细的操作命令和配置示例,并强调测试过程中的注意事项。
1、大陆ARS548手册
输出点云数

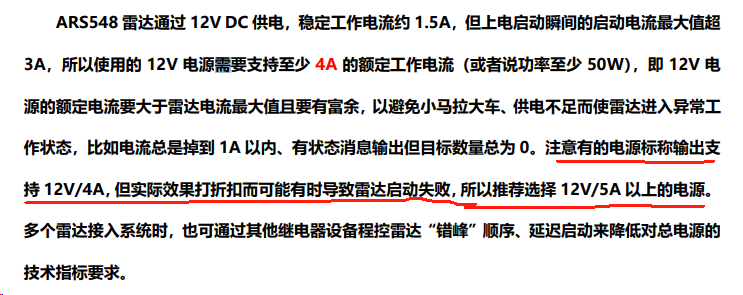
电源:
最大检测距离: 301m 93~1514m可调
时间同步:gPTP
2. 接线调试
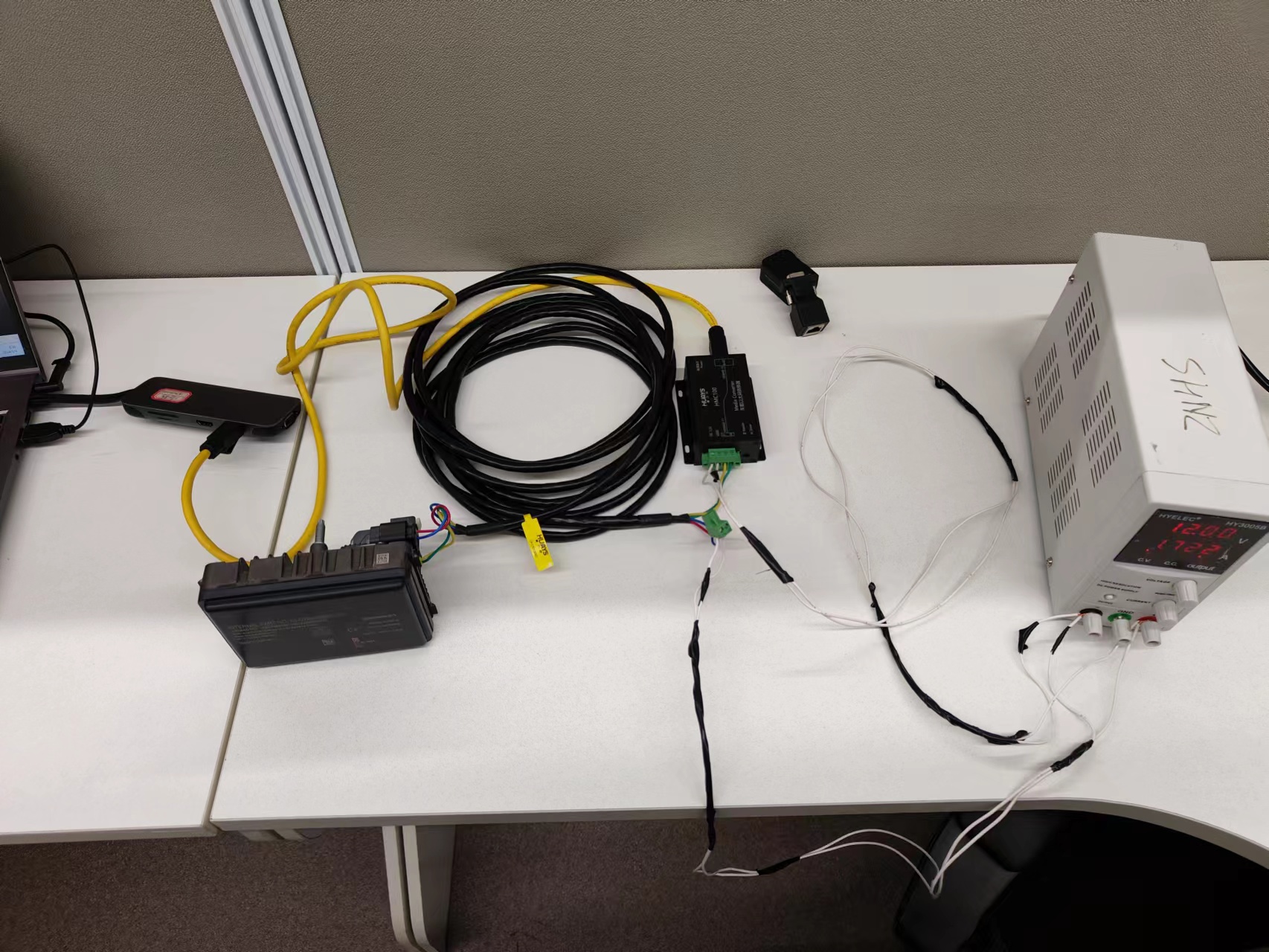
windows - 需要加一个Hub
Linux - 直接连网线就行
根据测试的实际结果,建议Windows 下测试时 加一个 RJ45 - USB的 hub 修改 hub 上的网卡 , linux 直接连接电脑修改eno1的网卡就行。
注:windows下 intel的网卡不支持点云数据的查看,需要使用绿联的以太转USB的hub,接到电脑上,设置相应的 VLAN ID 和 IP,防火墙可以不禁用。
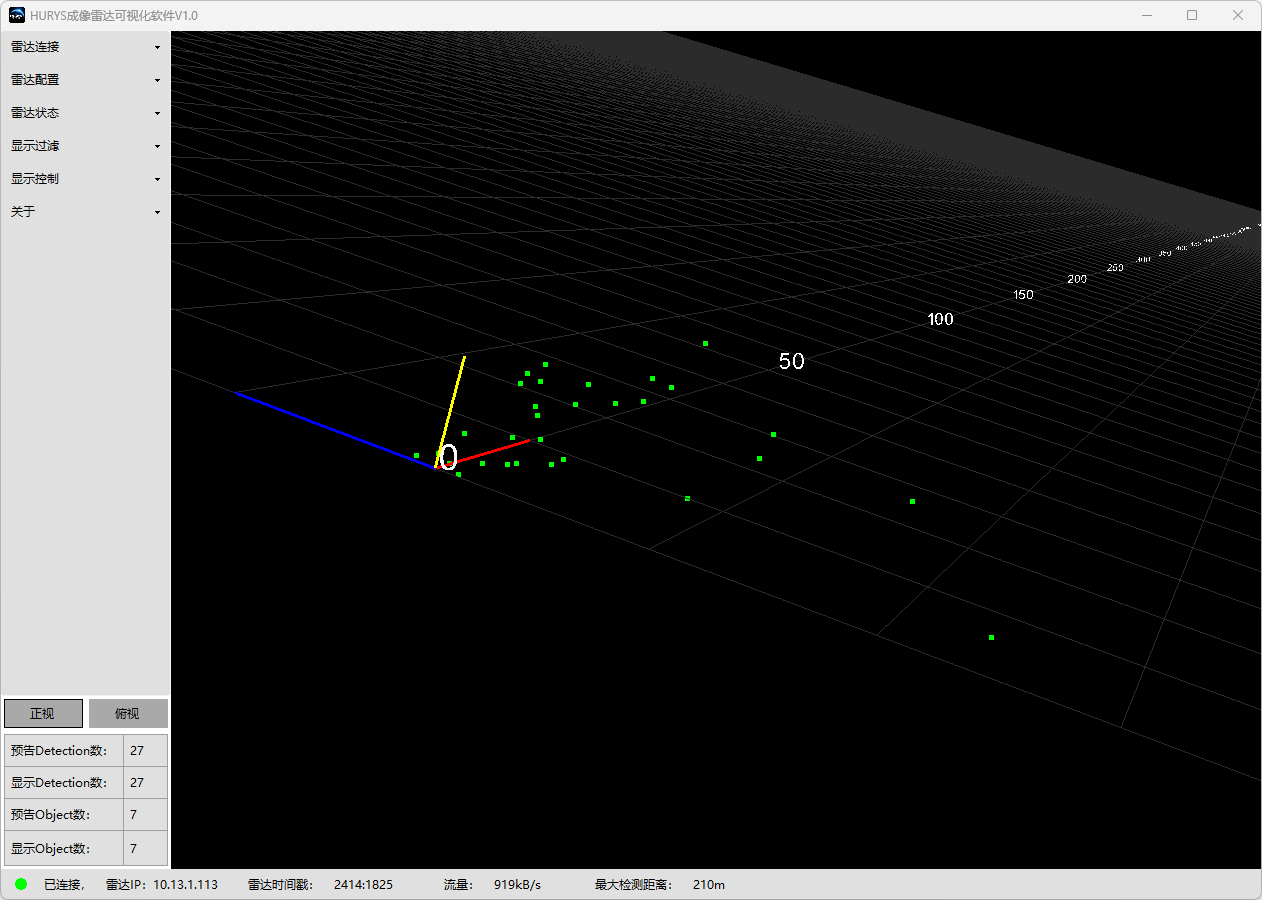
3. 上位机软件测试
2
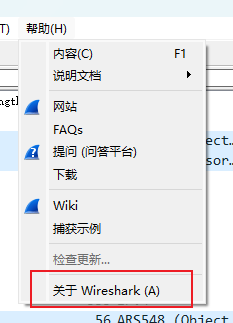
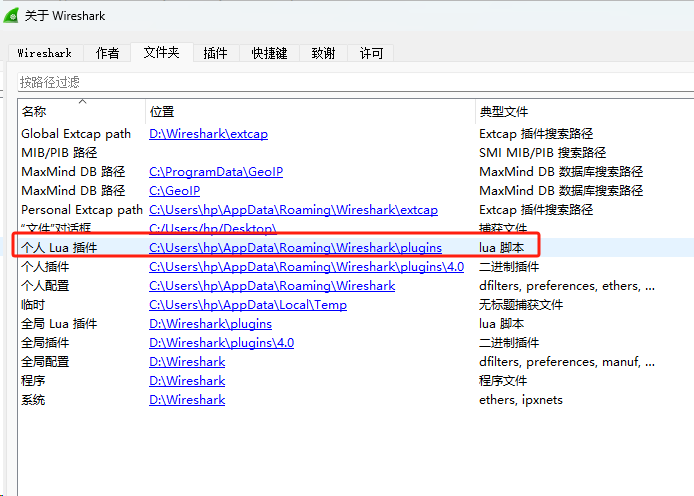
4. Wireshark加载lua插件
不同固件版本的雷达,需要加载不同固件对应的 lua 脚本;
帮助 >> 关于wireshark >> 文件夹 >> lua插件文件夹加载 >> 重启wireshark
实验室 目前 ARS548的毫米波雷达 需要加载 《5.ARS548_v5.48.4_20221214》 lua
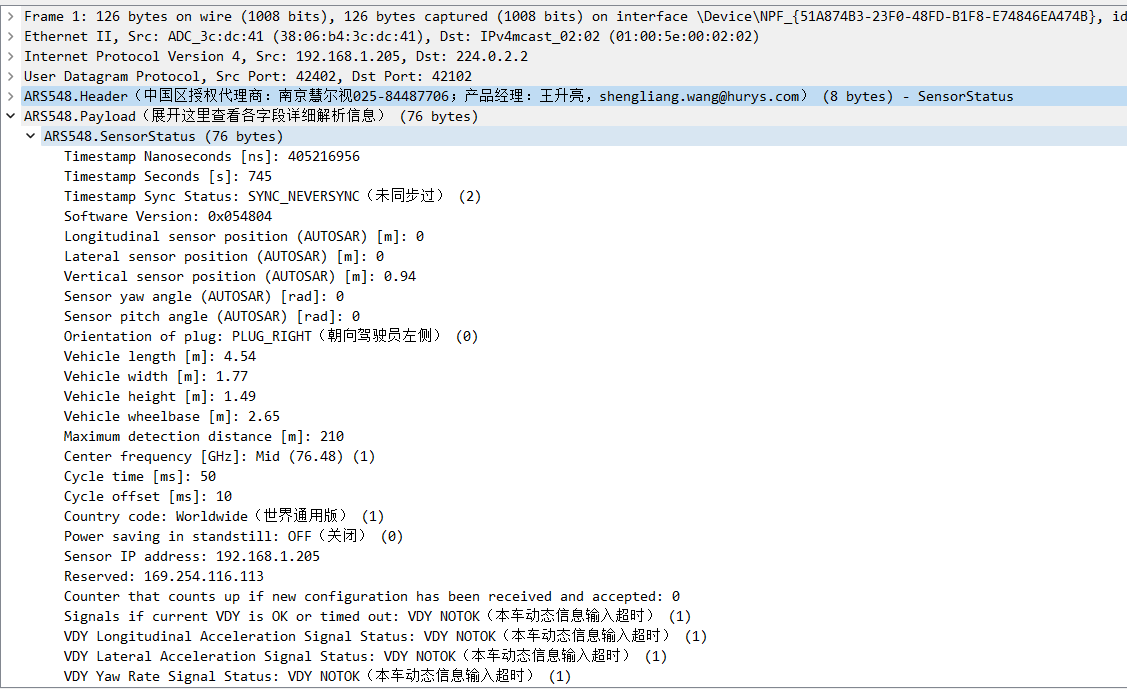
加载后
5. 设备VLAN ID 19 修改
设备:ubuntu系统
(1) 设备 VLAN ID 19修改
由于ARS548雷达本身是组播模式传输数据,提供的上位机软件没有单播模式可修改。
因此,需要将电脑本身的IP添加到组播组中,修改VLAN ID为19.
提供了两种修改方式,建议采用第二种方式修改。
方式1 - 临时修改:
在 Ubuntu 系统下,可以使用 ip 命令来配置以太网卡的 VLAN。以下是配置以太网卡 VLAN ID 为
19 的步骤:
确认网络接口名称: 打开终端并运行以下命令,找到你要配置的网络接口的名称。
ip link

- 添加 VLAN: 使用以下命令将 VLAN 19 添加到你的以太网接口, 以太网接口名称为eno1 :
sudo ip link add link eno1 name eno1.19 type vlan id 19
这将创建一个名为 eth0.19 的虚拟接口,并将其与 VLAN 19 关联。
- 启用 VLAN 接口: 使用以下命令启用新创建的 VLAN 接口:
sudo ip link set dev eno1.19 up
up是开启,down是关闭。
- 验证配置: 运行以下命令验证 VLAN 配置:
ip link show
你应该能够看到 eth0 和 eth0.19 这两个接口,其中 eth0.19 是 VLAN 19 的子接口。
这样,以太网卡就配置了 VLAN ID 19。
方式2 - 永久修改:
上述更改在系统重启后将被重置。如果想要使其永久生效,需要将配置信息添加到网络配置文件中。
网络配置文件通常位于: /etc/network/interfaces 或 /etc/netplan/
目录下,具体取决于你的系统和网络管理器。如果使 用 Netplan 进行网络配置,可以编辑 Netplan 配置文件,例如 /etc/netplan/01-netcfg.yaml,
修改前需要备份一下:

并在接口的 vlans 部分添加以下内容:
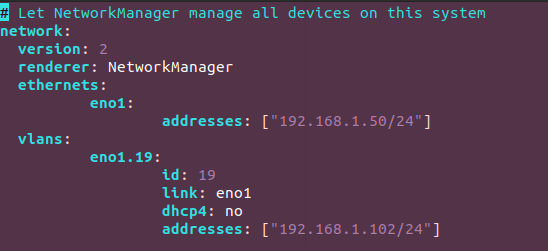
最后执行:
sudo netplan apply
这样配置将在系统重启后保持。
6. 时间同步测试
参考介绍博文:
- https://getiot.tech/zh/linux-command/ Linux命令大全 有 ptp4l + phc2sys的使用介绍
ARS548支持gPTP协议,采用 linuxptp 开源工具进行时间同步,PC机或者域控制器是主时钟,雷达是从时钟;
(1)安装linuxptp工具
linuxptp-4.2.tgz
1
一般直接sudo apt-get install linuxptp就行,但是在使用过程中发现报错:
unknown option BMCA at line 26 in global section
查资料发现,直接apt-get安装,不支持BMCA
2
随后从github上下载 git clone git://git.code.sf.net/p/linuxptp/code linuxptp
执行 sudo make | sudo make install 安装, 依旧报错
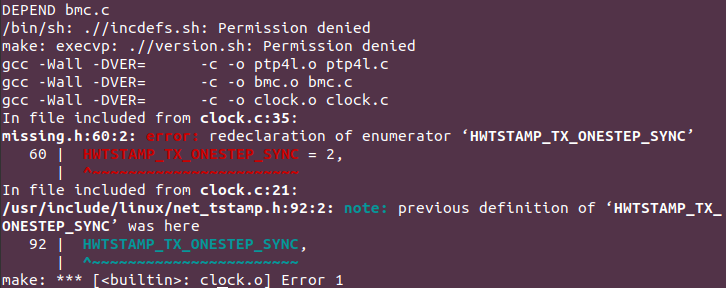
3
更换了一个安装包,
https://sourceforge.net/projects/linuxptp/
执行 cd linuxptp | sudo make | sudo make install 安装
(2) 安装完成之后,修改auto-Master.cfg 配置文件
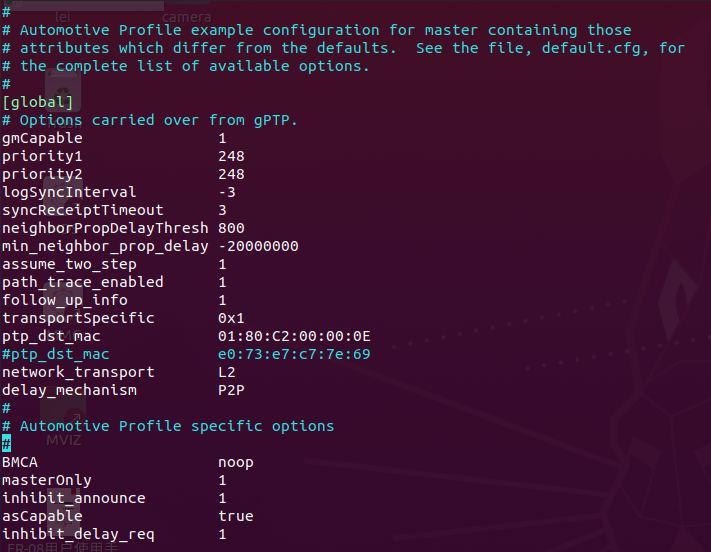
将 ptp_dst_mac 修改为 ARS548 雷达的 mac 地址。
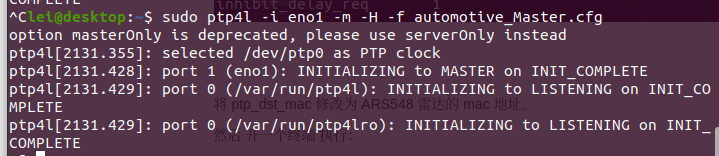
然后 开一个终端 执行:
sudo ptp4l -i eno1 -m -H -f automotive_Master.cfg
结果如下:
再开一个终端 执行:
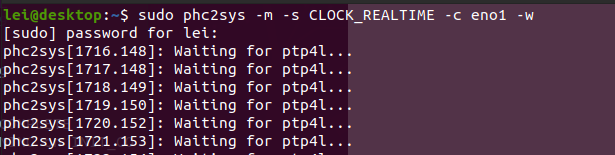
sudo phc2sys -m -s CLOCK_REALTIME -c eno1 -w
结果如下:
然后打开终端执行:
sudo wireshark
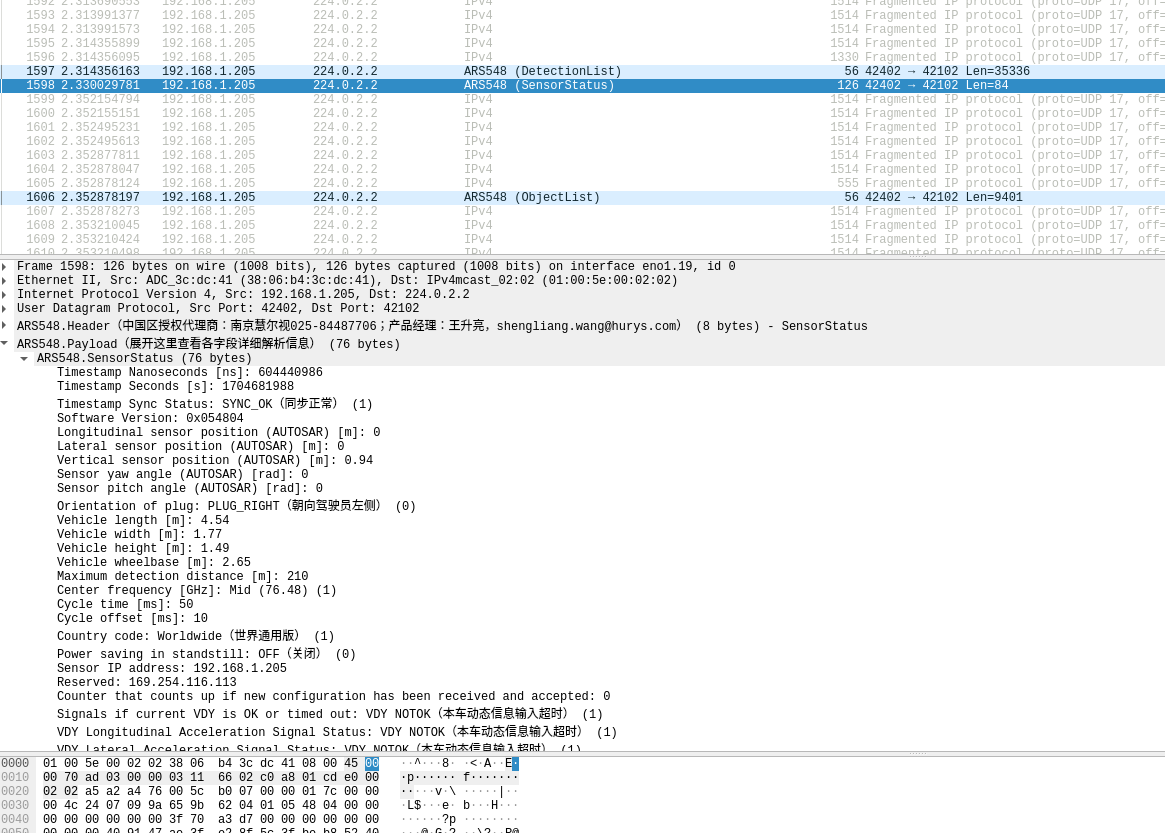
ARS548会以20HZ的速度发数据报文,三种类型,detectionlist、sensorstatus、objectlist。
主要查看其中的sensorsStatus : Sync Status 状态位为1 则表示 时间同步成功,此时同步正常。
注意:
-
测试过程中使用转接盒的话,ARS548发的包,其MAC 地址 是 转接盒的 MAC地址;
-
以上两条核心命令测试执行后,下次还需要再次输入,因此可以将其以服务的方式启动,每次系统自启,作为后台进程;
7. ROS 点云查看
需要将供应商提供的 parse 包放到ROS 的catkin_ws 的src下面
按照如下步骤,编译ros node节点
CATKIN_MAKE:
将parse文件夹拷贝至“${ROS_WORKSPACE}/src/”下
切换至WORKSPACE目录: cd ${ROS_WORKSPACE}
执行命令:catkin_make
若catkin_make忽略了parse项目,执行: catkin_make --only-pkg-with-deps parse
运行DEMO前确认以下步骤:
配置网卡IP与雷达IP在相同网段,配置网卡VLAN ID
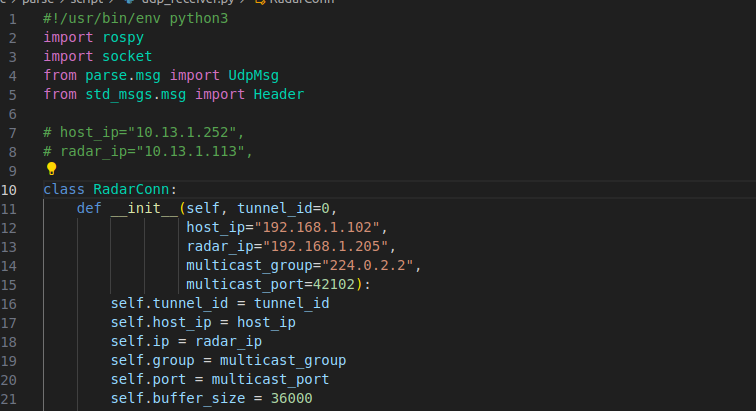
parse/script/udp_receiver.py, line 75 配置host_ip与radar_ip
host_ip : 192.168.1.102
radar_ip : 192.168.1.205
添加python脚本执行权限: chmod +x ${ROS_WORKSPACE}/src/parse/script/*
运行DEMO:
roslaunch parse single_radar_viz.launch
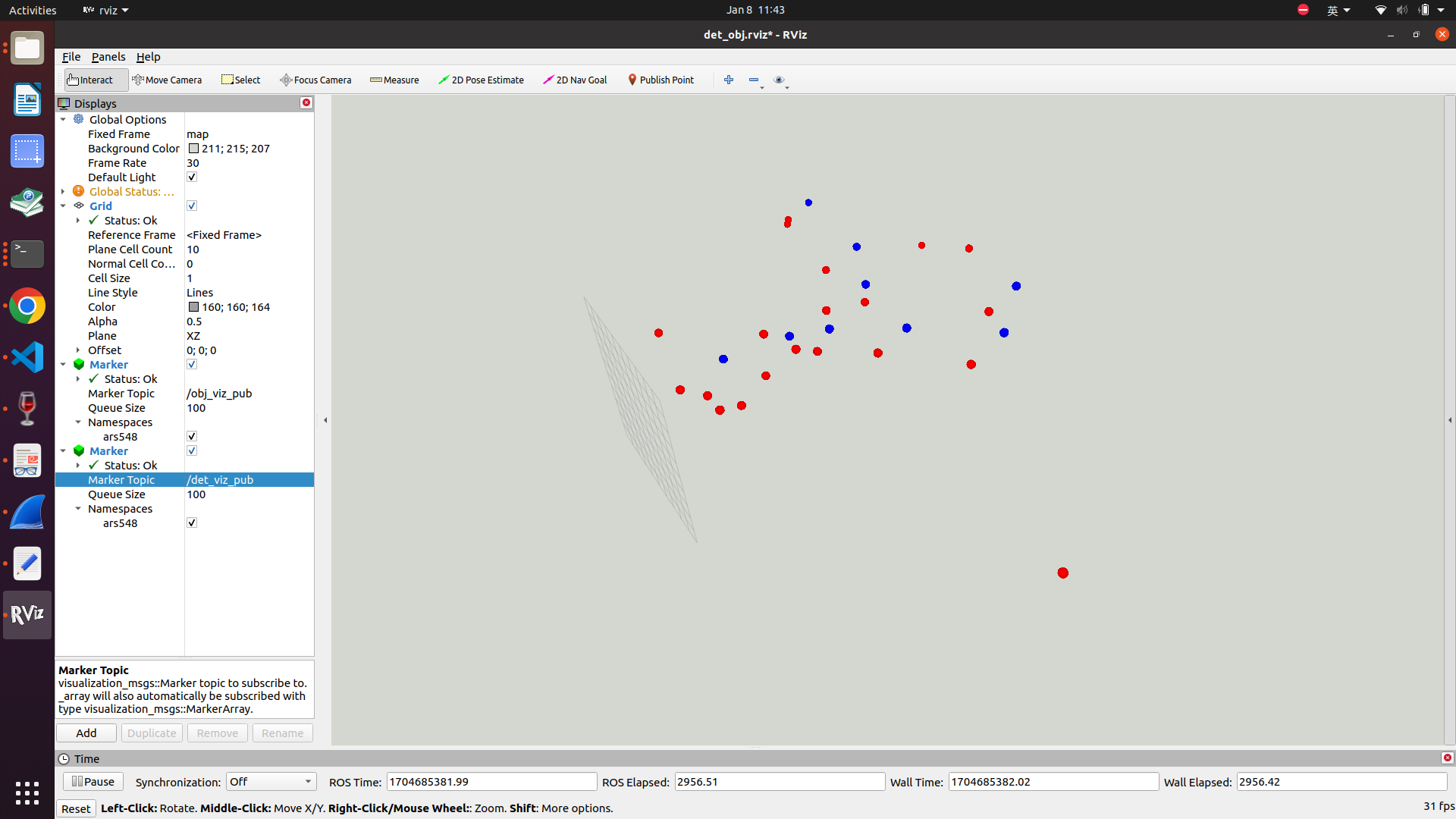
**核心有两种类型的 Topic : ** detection模式: /det_viz_pub | obj_viz_pub
可以选择显示某种类型的数据。
8. ROS点云数据采集
类似菜鸟教程的网站:https://getiot.tech/zh/
1. rosbag 使用说明:
https://blog.csdn.net/QLeelq/article/details/123201294
2. rosbag 播放数据, rviz查看数据
https://blog.csdn.net/qq_42585108/article/details/104853192
- 启动launch文件
roslaunch parse single_radar_viz.launch
- 记录所有的话题数据 (文件名会自动保存为日期)
rosbag record -a
- 播放bag文件
rosbag play xx.bag
- 打开rviz查看数据
rosrun rviz rviz
- 在rviz中订阅相关的topic即可查看
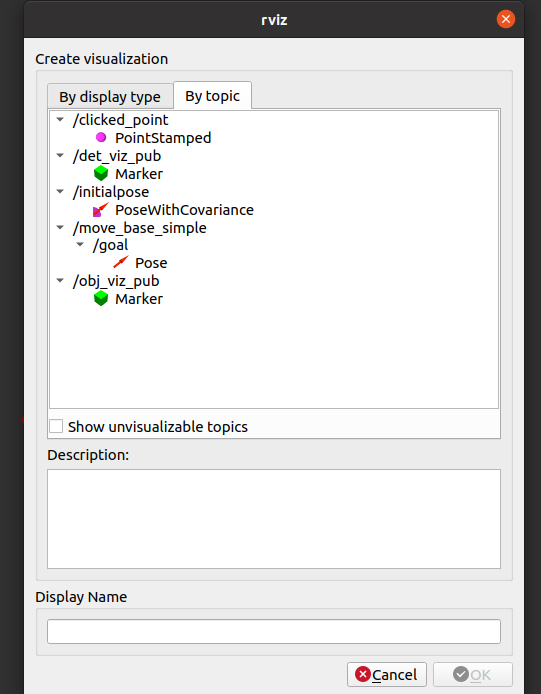
附录
1. VLAN + 组播 (云驰适配问题)
二层交换机和三层交换机的区别: https://zhuanlan.zhihu.com/p/379870366
VLAN介绍: https://zhuanlan.zhihu.com/p/385949949
相关文章:
大陆4D毫米波雷达ARS548调试
本文介绍了大陆ARS548毫米波雷达的调试与测试流程,主要包括以下内容: 设备参数:最大检测距离301m(可调93-1514m),支持gPTP时间同步。 接线调试: Windows需使用USB-RJ45转换器 Linux可直接连接网…...

Qt Quick模块功能及架构
Qt 6.0 中的 Qt Quick 模块是构建现代、动态用户界面的核心框架,基于声明式编程(QML)和 JavaScript,专注于高性能、流畅的动画和跨平台 UI 开发。、 一、主要功能改进 1. Qt Quick 核心架构 QML 引擎升级:Qt 6.0 使用…...

C++信息学竞赛中常用函数的一般用法
在C 信息学竞赛中,有许多常用函数能大幅提升编程效率。下面为你介绍一些常见函数及其一般用法: 一、比较函数 1、max()//求出a,b的较大值 int a10,b5,c;cmax(a,b);//得出的结果就是c等于10. 2、min()//求出a,b的较小值 int a1…...
大语言模型解析
1. Input Embedding embedding:将自然语言翻译成index 每个index对应一个embedding,embedding需要训练,embedding是一个数组...

全面解析网络端口:概念、分类与安全应用
在计算机网络的世界里,数据的传输与交互如同一场繁忙的物流运输,而网络端口就是其中不可或缺的 “货运码头”。无论是日常浏览网页、收发邮件,还是运行各类网络服务,都离不开网络端口的参与。本文将深入介绍网络端口的相关知识&am…...

Python网页自动化测试,DrissonPage库入门说明文档
🛰️ 基本逻辑 操作浏览器的基本逻辑如下: 创建浏览器对象,用于启动或接管浏览器获取一个 Tab 对象使用 Tab 对象访问网址使用 Tab 对象获取标签页内需要的元素对象使用元素对象进行交互 除此以外,还能执行更为复杂的操作&am…...
摄像机(Camera))
C++.OpenGL (9/64)摄像机(Camera)
颜色(Color) 颜色理论在OpenGL中的应用 #mermaid-svg-dKNDfS4EKDUmG4Ts {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-dKNDfS4EKDUmG4Ts .error-icon{fill:#552222;}#mermaid-svg-dKNDfS4EKDUmG4Ts .error-text…...

民锋视角下的资金流效率与账户行为建模
民锋视角下的资金流效率与账户行为建模 在当前复杂多变的金融环境中,资金流效率已成为衡量一家金融服务机构专业能力的重要指标。民锋在账户管理与资金调配的实战经验中,逐步建立起一套以资金流路径为核心的行为建模方法,用以评估客户行为、交…...

python打卡第48天
知识点回顾: 随机张量的生成:torch.randn函数卷积和池化的计算公式(可以不掌握,会自动计算的)pytorch的广播机制:加法和乘法的广播机制 ps:numpy运算也有类似的广播机制,基本一致 **…...

matlab实现DBR激光器计算
DBR激光器计算程序。非常值得参考的程序。DBR激光器程序 DBR计算/1.txt , 2056 DBR计算/4.asv , 22 DBR计算/4.txt , 32 DBR计算/GetDeviceEfficiency.asv , 2012 DBR计算/GetDeviceEfficiency.m , 2014 DBR计算/GetOneLayerArray.asv , 837 DBR计算/GetOneLayerArray.m , 836…...
Java在word中指定位置插入图片。
Java使用(Poi-tl) 在word(docx)中指定位置插入图片 Poi-tl 简介Maven 依赖配置Poi-tl 实现原理与步骤1. 模板标签规范2.完整实现代码3.效果展示 Poi-tl 简介 Poi-tl 是基于 Apache POI 的 Java 开源文档处理库,专注于…...

uni-app学习笔记三十--request网络请求传参
request用于发起网络请求。 OBJECT 参数说明 参数名类型必填默认值说明平台差异说明urlString是开发者服务器接口地址dataObject/String/ArrayBuffer否请求的参数App 3.3.7 以下不支持 ArrayBuffer 类型headerObject否设置请求的 header,header 中不能设置 Refere…...
可视化图解算法48:有效括号序列
牛客网 面试笔试 TOP101 | LeetCode 20. 有效的括号 1. 题目 描述 给出一个仅包含字符(,),{,},[和],的字符串,判断给出的字符串是否是合法的括号序列 括号必须以正确的顺序关闭,"()"和"()[]{}"都是合法的括号序列&…...
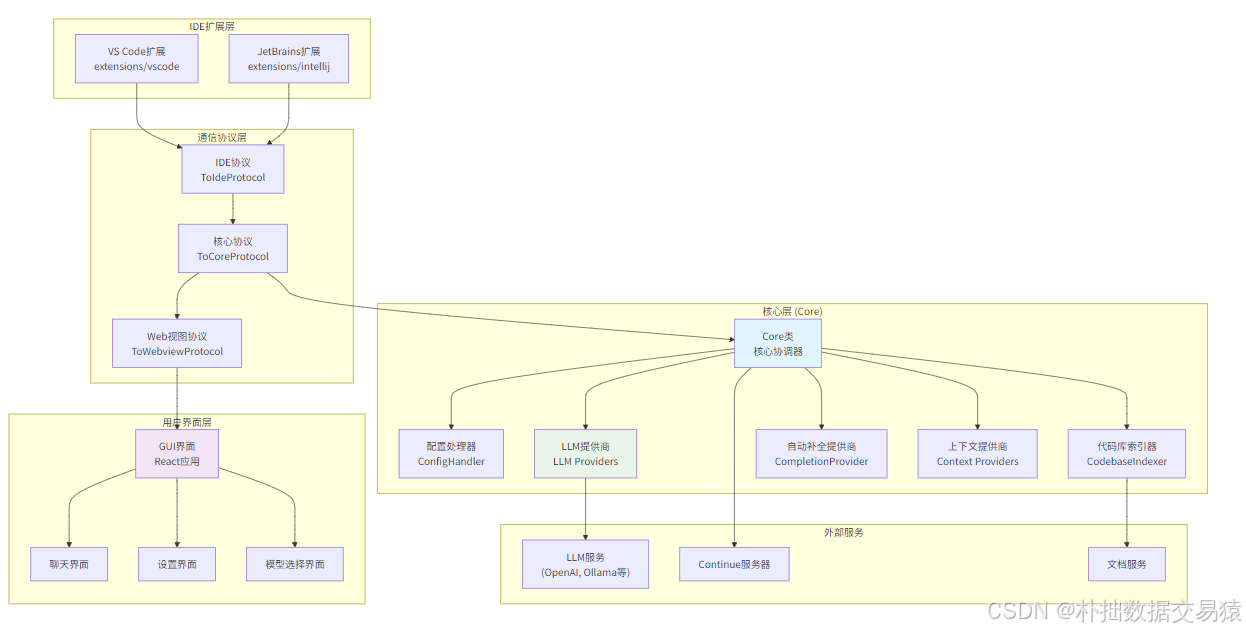
Continue 开源 AI 编程助手框架深度分析
Continue 开源 AI 编程助手框架深度分析 一、项目简介 Continue 是一个模块化、可配置、跨平台的开源 AI 编程助手框架,目标是让开发者能在本地或云端环境中,快速集成和使用自定义的 LLM 编程辅助工具。它通过支持 VS Code 与 JetBrains 等主流 IDE 插件…...

MySQL技术内幕1:内容介绍+MySQL编译使用介绍
文章目录 1.整体内容介绍2.下载编译流程2.1 安装编译工具和依赖库2.2 下载编译 3.配置MySQL3.1 数据库初始化3.2 编辑配置文件3.3 启动停止MySQL3.4 登录并修改密码 1.整体内容介绍 MySQL技术系列文章将从MySQL下载编译,使用到MySQL各组件使用原理源码分析…...
)
RMQ 算法详解(区间最值问题)
RMQ 算法详解(区间最值问题) 问题介绍解决方法暴力法ST表法基本思想算法步骤C实现 问题介绍 RMQ问题是OI中经常遇到的问题,主要是一下形式: 给你一堆数,不断的对里面的数进行操作,例如:让某个…...

SpringCloud——Nacos
1、核心功能: 服务注册与发现: 服务实例可动态注入到Nacos中,消费者通过服务名发现可用实例。 // 启用EnableDiscoveryClient注解启用Nacos SpringBootApplication EnableDiscoveryClient public class UserServiceApplication {public st…...

ubuntu自定义服务自动启动
自定义服务 在路径 /etc/systemd/system/ 下 定义example.service [Unit] DescriptionMy Custom Script[Service] ExecStart/root/exe_start.sh Typeoneshot RemainAfterExityes[Install] WantedBymulti-user.target在/root/ 路径下执行 vi exe_start.shcd /root/mes_server/…...

网络安全问题及对策研究
摘 要 网络安全问题一直是近年来社会乃至全世界十分关注的重要性问题,网络关乎着我们的生活,政治,经济等多个方面,致力解决网络安全问题以及给出行之有效的安全策略是网络安全领域的一大目标。 本论文简述了课题的开发背景&…...

Ubantu-Docker配置最新镜像源250605
尝试其他镜像加速器 阿里云镜像加速器:登录阿里云,进入容器镜像服务获取专属加速器地址。毫秒镜像:https://docker.1ms.run。DockerHub镜像加速器:https://docker.xuanyuan.me。Docker Hub 镜像加速服务:https://dock…...
【计算机网络】NAT、代理服务器、内网穿透、内网打洞、局域网中交换机
🔥个人主页🔥:孤寂大仙V 🌈收录专栏🌈:计算机网络 🌹往期回顾🌹:【计算机网络】数据链路层——ARP协议 🔖流水不争,争的是滔滔不息 一、网络地址转…...
)
后端解决跨域问题的三种方案:注解配置 vs 全局配置 vs 过滤器配置(附完整代码详解)
文章目录 一、引言:跨域问题的本质与解决方案分类解决方案分类二、方案一:`WebMvcConfigurer` 全局配置(推荐)1. 核心代码(你提供的 `CorsConfig` 示例)2. 代码详解3. 优点4. 注意事项三、方案二:`CorsFilter` 过滤器配置(传统方式)1. 核心代码(你提供的 `ResourcesC…...
在 Vue 的template中使用 Pug 的完整教程
在 Vue 的template中使用 Pug 的完整教程 引言 什么是 Pug? Pug(原名 Jade)是一种高效的网页模板引擎,通过缩进式语法和简洁的写法减少 HTML 的冗长代码。Pug 省略了尖括号和闭合标签,使用缩进定义结构,…...

【立体匹配】:双目立体匹配SGBM:(1)运行
注:这是一个专题,我会一步步介绍SGBM的实现,按照我的使用和优化过程逐步改善算法,附带实现方法 系列文章【立体匹配】:双目立体匹配SGBM:(1)运行 【立体匹配】:双目立体匹…...
< 自用文 OS有关 新的JD云主机> 国内 京东云主机 2C4G 60G 5Mb 498/36月 Ubuntu22
攒了这么久,废话一些: 前几周很多事儿,打算回北京,开个清真的德克萨斯烤肉店,写了一篇 : < 自用文 Texas style Smoker > 美式德克萨斯烟熏炉 从设计到实现 (第一部分&…...

十、【ESP32开发全栈指南: TCP客户端】
一、TCP协议核心特性回顾 TCP与UDP关键差异 特性TCPUDP连接方式面向连接 (三次握手)无连接可靠性可靠传输 (重传/排序/校验)尽力交付数据顺序保证数据按序到达不保证顺序流控制滑动窗口机制无流控制传输效率协议开销大头部开销小适用场景文件传输、网页浏览实时音视频、广播通…...

基于机器学习的智能故障预测系统:构建与优化
前言 在现代工业生产中,设备故障不仅会导致生产中断,还会带来巨大的经济损失。传统的故障检测方法依赖于人工巡检和定期维护,这种方式效率低下且难以提前预测潜在故障。随着工业物联网(IIoT)和机器学习技术的发展&…...

设计模式-观察着模式
观察者模式 观察者模式 (Observer Pattern) 是一种行为型设计模式,它定义了对象之间一种一对多的依赖关系,当一个对象(称为主题或可观察者)的状态发生改变时,所有依赖于它的对象(称为观察者)都…...
《架构即未来》笔记
思维导图 第一部分:可扩展性组织的人员配置 第二部分:构建可扩展的过程 第三部分:可扩展的架构方案 第四部分:其他的问题和挑战 资料 问软件工程研究所: https://www.sei.cmu.edu/ AKF公司博客: http://www.akfpart…...

stm32—ADC和DAC
ADC和DAC 在嵌入式系统中,微控制器经常需要与现实世界的模拟信号进行交互。STM32微控制器内置了模拟数字转换器(ADC)和数字模拟转换器(DAC),它们是实现这种交互的关键模块。 1. 模拟数字转换器(…...