作为点的对象CenterNet论文阅读
摘要
检测器将图像中的物体表示为轴对齐的边界框。大多数成功的目标检测方法都会枚举几乎完整的潜在目标位置列表,并对每一个位置进行分类。这种做法既浪费又低效,并且需要额外的后处理。在本文中,我们采取了不同的方法。我们将物体建模为单个点——其边界框的中心点。我们的检测器使用关键点估计来寻找中心点,并回归预测所有其他物体属性,例如大小、三维位置、朝向,甚至姿态。基于中心点的方法 CenterNet 是端到端可微的,更简单、更快速,也比相应的基于边界框的检测器更准确。CenterNet 在 MS COCO 数据集上实现了最佳的速度—精度权衡,在 142 FPS 时达到 28.1% AP,在 52 FPS 时达到 37.4% AP,在多尺度测试(1.4 FPS)时达到 45.1% AP。我们使用相同的方法在 KITTI 基准上估计 3D 边界框,并在人体关键点数据集上进行姿态估计。我们的方法在与复杂的多阶段方法竞争时表现优异,并可实时运行。
引言
目标检测推动了许多视觉任务的发展,如实例分割 [7,21,32]、姿态估计 [3,15,39]、跟踪 [24,27] 和动作识别 [5]。它在监控 [57]、自动驾驶 [53] 以及视觉问答 [1] 等领域具有下游应用。当前的目标检测器通过一个紧密包围物体的轴对齐边界框来表示每个物体 [18,19,33,43,46]。然后,它们将目标检测问题简化为对大量潜在边界框的图像分类。对于每个边界框,分类器判断其中的图像内容是某个特定物体还是背景。单阶段检测器 [33,43] 在图像上滑动一组复杂的、可能的边界框(称为锚点),并直接对它们进行分类,而不指定框的具体内容。两阶段检测器 [18,19,46] 则为每个潜在框重新计算图像特征,然后对这些特征进行分类。随后通过非极大值抑制(NMS)后处理,依据边界框的 IoU(交并比)去除同一实例的重复检测。该后处理过程难以微分和训练 [23],因此大多数当前检测器并非端到端可训练。然而,在过去五年中 [19],这一思路已取得了良好的经验性成功 [12,21,25,26,31,35,47,48,56,62,63]。基于滑动窗口的目标检测虽然成功,但需要枚举所有可能的物体位置和尺寸,因而略显低效。
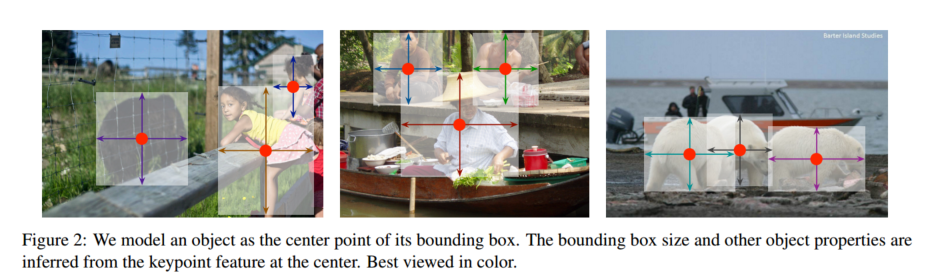
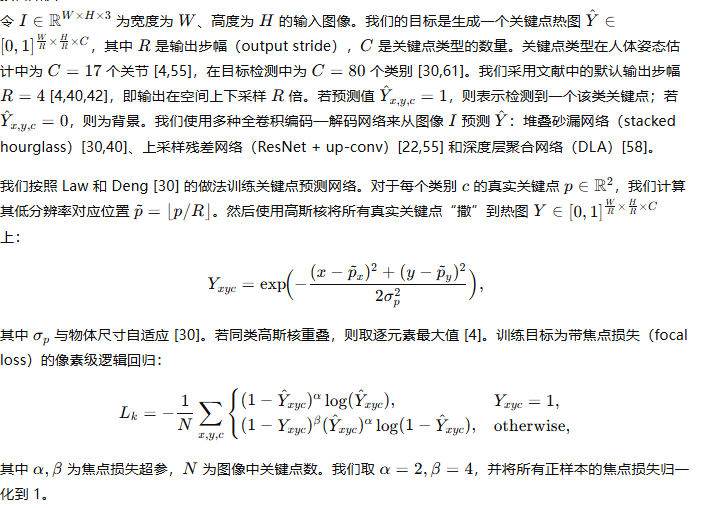
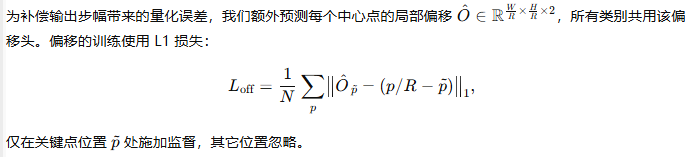
在本文中,我们提供了一种更简单、更高效的替代方案。我们将物体用其边界框中心的一个点来表示(见图 2)。然后,从该中心位置的图像特征中直接回归预测物体的大小、尺寸、三维范围、朝向和姿态等属性。目标检测便转化为标准的关键点估计问题 [3,39,60]。我们只需将输入图像送入一个全卷积网络 [37,40],它会生成一个热图。热图中的峰值对应物体中心。在每个峰值处提取的图像特征用于预测物体边界框的宽度和高度。该模型使用标准的密集监督学习进行训练 [39,60]。推理时仅需一次网络前向传播,无需非极大值抑制等后处理。
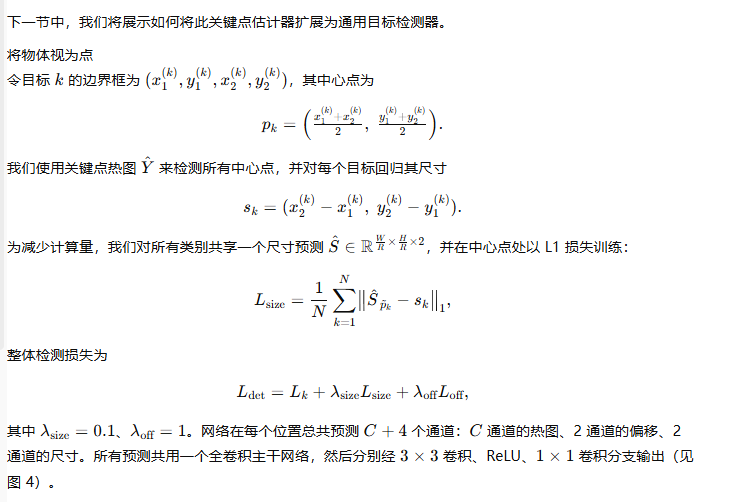
我们的方法具有通用性,仅需少量改动即可扩展到其他任务。我们在 3D 目标检测 [17] 和多人姿态估计 [4] 上进行了实验,通过在每个中心点预测额外的输出(见图 4)。对于 3D 边界框估计,我们回归预测物体的绝对深度、3D 边界框尺寸和物体朝向 [38]。对于人体姿态估计,我们将 2D 关节点位置视为相对于中心的偏移量,并在中心点位置直接回归预测这些偏移。
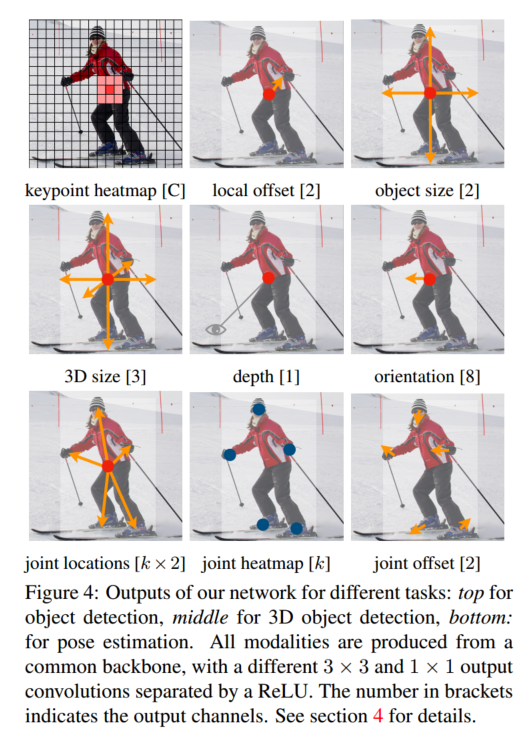
图 4:我们网络在不同任务上的输出:顶部为目标检测,中部为 3D 目标检测,底部为姿态估计。所有这些输出都来自一个通用的主干网络,之后分别通过一个 3×3 和一个 1×1 的输出卷积(中间以 ReLU 激活分隔)。括号中的数字表示输出通道数。详见第 4 节。
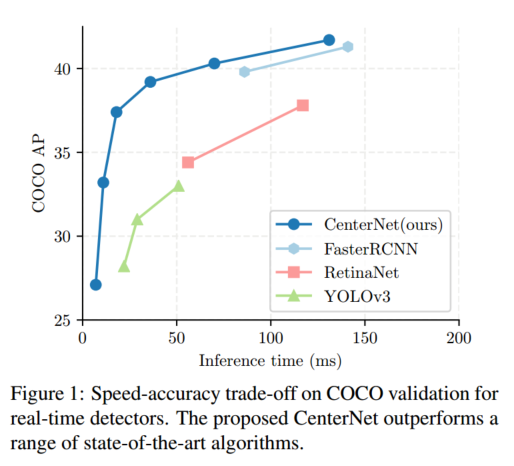
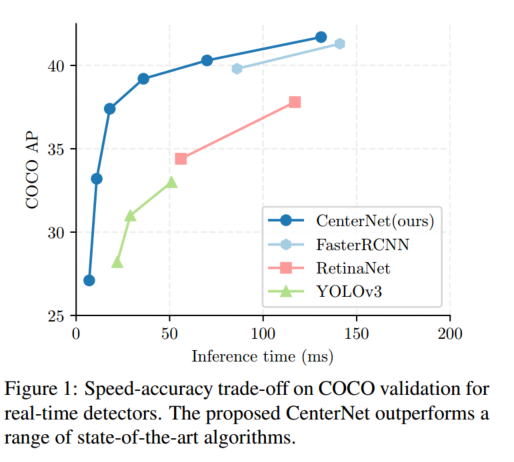
我们的方法 CenterNet 足够简单,能够以非常高的速度运行(见图 1)。使用简单的 ResNet-18 和上采样卷积层 [55],我们的网络在 142 FPS 下实现了 28.1% 的 COCO 边界框 AP。使用精心设计的关键点检测网络 DLA-34 [58],我们的网络在 52 FPS 下达到 37.4% 的 COCO AP。配备最先进的关键点估计网络 Hourglass-104 [30,40] 并使用多尺度测试后,我们的网络在 1.4 FPS 下实现了 45.1% 的 COCO AP。在 3D 边界框估计和人体姿态估计任务中,我们以更高的推理速度与最先进的方法竞争。代码已发布于 https://github.com/xingyizhou/CenterNet。
相关工作
基于区域分类的目标检测。 RCNN [19] 是最早成功的深度目标检测器之一,它从大量候选区域 [52] 中枚举目标位置,对每个区域进行裁剪,然后使用深度网络进行分类。Fast R-CNN [18] 则对图像特征进行裁剪,以节省计算资源,但两者都依赖于缓慢的低层区域提议方法。
带隐式锚点的目标检测。 Faster R-CNN [46] 在检测网络内部生成区域提议。它在低分辨率的图像网格上采样固定形状的边界框(锚点),并将每个锚点分类为“前景或背景”。当锚点与任一真实目标的重叠度(IoU)>0.7 时标记为前景,<0.3 时标记为背景,否则忽略。随后对每个生成的区域提议再次进行分类 [18]。将提议分类器改为多类分类器构成了单阶段检测器的基础。一阶段检测器的若干改进包括锚点形状先验 [44,45]、不同的特征分辨率 [36] 以及对不同样本重加权的损失 [33]。
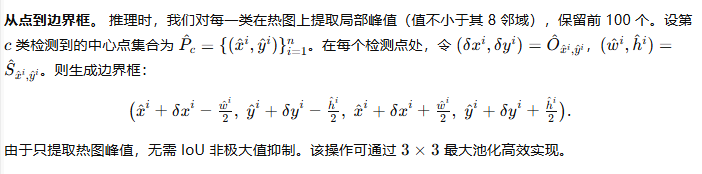
我们的方法与基于锚点的一阶段方法 [33,36,43] 密切相关。中心点可看作是一个与形状无关的单一锚点(见图 3)。但我们的 CenterNet 有几点重要区别。首先,CenterNet 仅基于位置分配“锚点”,而不是基于边界框重叠度 [18],无需人为设定前景/背景阈值 [18]。其次,每个物体仅有一个正样本“锚点”,因此无需非极大值抑制(NMS)[2],只需在关键点热图中提取局部峰值 [4,39]。第三,CenterNet 使用更高的输出分辨率(输出步幅为 4),而传统检测器输出步幅为 16 [21,22],从而无需使用多重锚点 [47]。
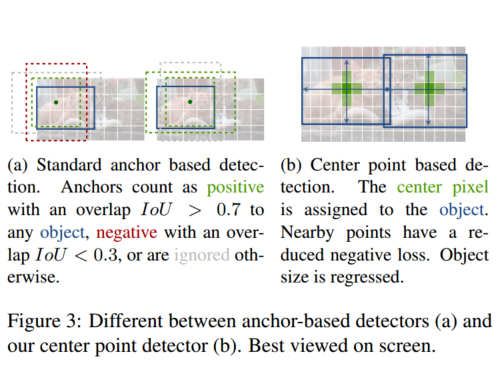
(a) 标准的基于锚框检测。对于任何目标,如果锚框与目标的 IoU > 0.7 则视为正样本,IoU < 0.3 则视为负样本,其它情况忽略。
(b) 基于中心点的检测。将中心像素分配给对应目标;距离中心较近的点会有较低的负样本损失;并回归目标的尺寸。
图 3:基于锚框的检测器 (a) 与我们提出的中心点检测器 (b) 之间的区别。建议在屏幕上观看以获得最佳效果。
通过关键点估计进行目标检测。 我们并不是首个将关键点估计用于目标检测的方法。CornerNet [30] 将两个边界框角点检测为关键点,而 ExtremeNet [61] 检测所有物体的顶部、左侧、底部、右侧和中心点。这两种方法都建立在与 CenterNet 相同的强大关键点估计网络之上,但它们在关键点检测后需要进行组合分组,这显著降低了速度。而我们的 CenterNet 则仅需为每个物体提取单个中心点,无需分组或后处理。
单目 3D 目标检测。 3D 边界框估计在自动驾驶中至关重要 [17]。Deep3Dbox [38] 使用类似 RCNN [19] 的框架,先检测 2D 目标 [46],再将每个目标输入到 3D 估计网络。3D RCNN [29] 在 Faster R-CNN [46] 后添加了一个 3D 投影分支。Deep Manta [6] 使用多任务训练的粗到精 Faster R-CNN [46]。我们的方法类似于 Deep3Dbox [38] 或 3DRCNN [29] 的一阶段版本,因此比竞品方法更简单、更快速。
预备知识
4.1 3D检测

4.2人体姿态估计
5、实现细节
我们在四种网络结构上进行了实验:ResNet-18、ResNet-101 [55]、DLA-34 [58] 和 Hourglass-104 [30]。对 ResNet 和 DLA-34 加入了可变形卷积层 [12],Hourglass 网络则保持原样。
Hourglass
堆叠砂漏网络(stacked Hourglass)[30,40] 首先将输入下采样 4×,然后依次通过两个砂漏模块。每个砂漏模块是一个对称的五层下采样—上采样卷积网络,带有跨层跳跃连接。该网络规模较大,但通常能带来最佳的关键点估计性能。
ResNet
Xiao 等 [55] 在标准残差网络 [22] 后接三个上采样卷积网络,以获得更高分辨率的输出(输出步幅为 4)。我们首先将这三层上采样的通道数改为 256、128、64,以节省计算量;然后在每个上采样卷积前分别加入一个通道数同为 256、128、64 的 3×3 可变形卷积层。上采样卷积核采用双线性插值初始化。详见补充材料中的结构图。
DLA
深度层聚合网络(DLA)[58] 是一种带层次化跳跃连接的图像分类网络。我们采用其全卷积上采样版本用于密集预测,通过迭代深度聚合对称地提高特征图分辨率。我们在每个上采样层将原卷积替换为 3×3 可变形卷积 [63],在跳跃连接中引入更灵活的采样。详见补充材料中的结构图。
对于所有模型,在每个输出头之前,我们都加入一个 3×3、256 通道的卷积层,随后再接一个 1×1 卷积以产生所需输出。更多细节见补充材料。
训练
输入分辨率为 512×512,产生的输出分辨率为 128×128。数据增强包括随机翻转、随机缩放(0.6–1.3)、裁剪和颜色抖动;使用 Adam [28] 优化总体目标。由于裁剪或缩放会改变 3D 测量,我们对 3D 分支不做增强。ResNet 和 DLA-34 以批量大小 128(8 GPUs)训练 140 个 epoch,初始学习率 5e-4,在第 90 和 120 个 epoch 时各将学习率降低 10×(同 [55])。Hourglass-104 按 ExtremeNet [61] 设置,批量大小 29(5 GPUs,其中主 GPU 批量大小为 4),学习率 2.5e-4,训练 50 个 epoch,第 40 个 epoch 时学习率降低 10×。检测任务中,为节省计算,Hourglass-104 从 ExtremeNet [61] 微调。ResNet-101 和 DLA-34 的下采样层使用 ImageNet 预训练权重,上采样层随机初始化。ResNet-101 和 DLA-34 在 8 枚 TITAN-V GPU 上训练 2.5 天,Hourglass-104 则需 5 天。
推理
我们使用三种测试增强策略:无增强、翻转增强、翻转+多尺度(0.5、0.75、1、1.25、1.5)。对于翻转增强,先对网络输出取平均,再解码边界框;对于多尺度,则使用 NMS 合并结果。这些增强在速度—精度上提供了不同的权衡,见下节分析。
实验
我们在 MS COCO 数据集 [34] 上评估目标检测性能。该数据集包含 118k 训练图像(train2017)、5k 验证图像(val2017)和 20k 测试图像(test-dev)。我们报告所有 IoU 阈值上的平均精度(AP),以及 IoU=0.5(AP50)和 IoU=0.75(AP75)下的 AP。补充材料中包含 PascalVOC [14] 上的额外实验。
6.1 目标检测
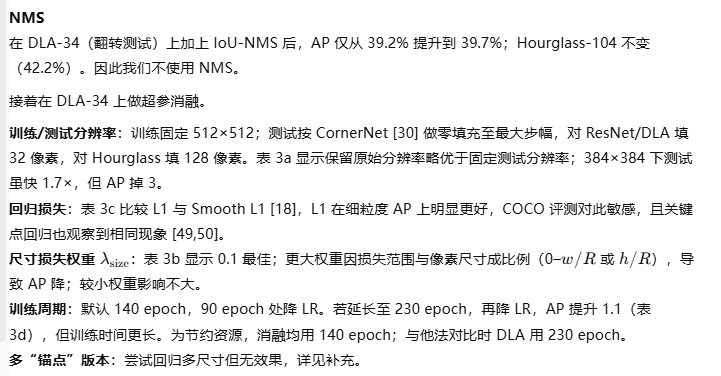
表 1 列出了在 COCO 验证集上,不同主干网络和测试选项下的结果;图 1 将 CenterNet 与其它实时检测器进行速度—精度对比。运行环境:Intel Core i7-8086K CPU、Titan Xp GPU、PyTorch 0.4.1、CUDA 9.0、cuDNN 7.1。我们下载各模型官方代码和预训练权重¹²,在同一机器上测运行时间。
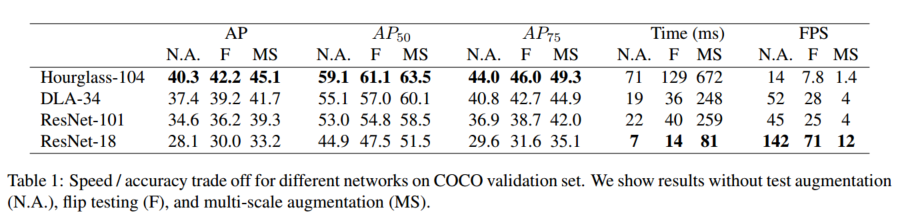
Hourglass-104 在较高精度和较好速度间取得平衡:7.8 FPS 下 42.2% AP。该主干上,CenterNet 在速度和精度上均优于 CornerNet [30](4.1 FPS,40.6% AP)和 ExtremeNet [61](3.1 FPS,40.3% AP)——得益于更少的输出头和更简单的解码方式;更高精度表明中心点比角点或极值点更易检测。
ResNet-101 主干下,我们也超越了同样主干的 RetinaNet [33]:在相同精度下速度提升超 2 倍(CenterNet 34.8% AP @ 45 FPS (512×512) vs. RetinaNet 34.4% AP @ 18 FPS (500×800))。我们最快的 ResNet-18 模型在 142 FPS 下也能取得 28.1% AP。
DLA-34 实现了最佳的速度—精度折衷:52 FPS 下 37.4% AP,比 YOLOv3 [45] 快超 2 倍、精度高 4.4% AP。加入翻转测试后,CenterNet 39.2% AP @ 28 FPS 仍快于 YOLOv3,且达到 Faster-R-CNN-FPN [46] 水平(39.8% AP @ 11 FPS)。
与最先进方法对比
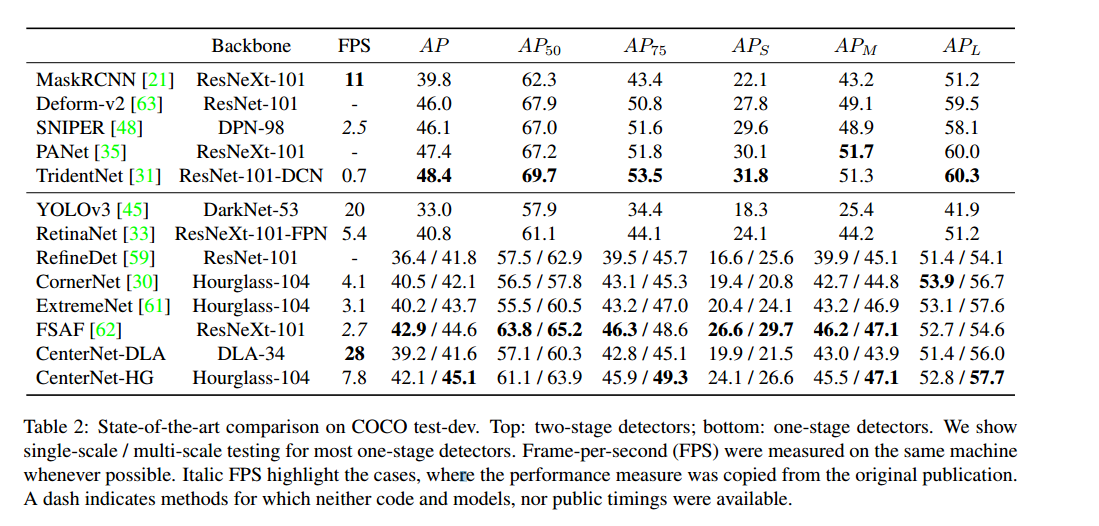
表 2 给出了 COCO test-dev 上的对比。多尺度测试下,Hourglass-104 主干的 CenterNet 达到 45.1% AP,超越所有现有一阶段检测器。复杂的两阶段方法 [31,35,48,63] 精度更高但速度更慢。CenterNet 在不同目标尺寸和 IoU 阈值下表现与常规模型无异,只是更快。
6.1.1 额外实验
中心点冲突
在 COCO 训练集中,步幅 4 下有 614 对物体中心重合。总对象数 860 001,因此因中心冲突丢失的检测 <0.1%,远低于 RCNN 因提议不足丢失的 ∼2% [52],以及 Faster-RCNN 因锚点不足丢失的 20.0% [46](15 锚点、IoU 0.5)。且其中 715 对重合的框 IoU>0.7,本应分配两个锚点,中心点方法冲突更少。
6.2 3D 检测
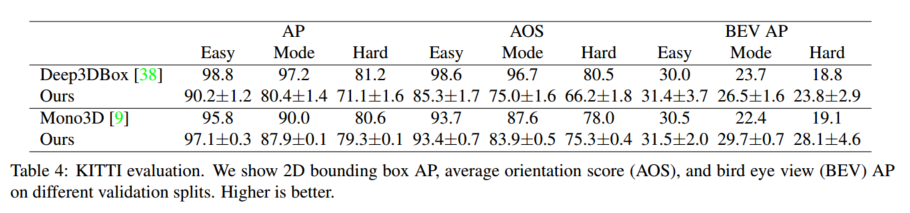
在 KITTI 数据集 [17] 上做 3D 边界框估计,包含 7841 张带车辆 3D 标注的训练图。按文献 [10,54] 划分训练/验证,评测使用 11 个召回率(0.0–1.0,步长 0.1)下的 AP@IoU 0.5,包括 2D AP、朝向精度 AOS 及鸟瞰图 BEV AP。训练/测试均保持原分辨率并填充至 1280×384;70 epoch 收敛,45、60 epoch 处各降 LR。主干用 DLA-34,深度/朝向/尺寸损失权重均设 1,其它超参同检测任务。
由于阈点少,验证 AP 波动达 10%,我们训练 5 个模型并报告均值±标准差。与 Deep3DBox [38](slow-RCNN)和 Mono3D [9](Faster-RCNN)对比(各自验证集划分),表 4 显示 CenterNet 在 AP、AOS 上持平,BEV 上略优,速度快两个量级。
6.3 姿态估计
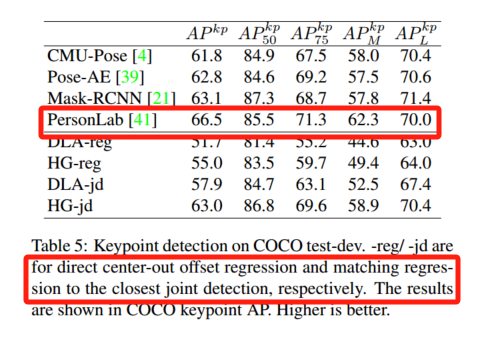
在 MS COCO 上评估多人姿态,使用关键点 AP(用关键点相似度替代 IoU)。在 COCO test-dev 上与其它方法对比。
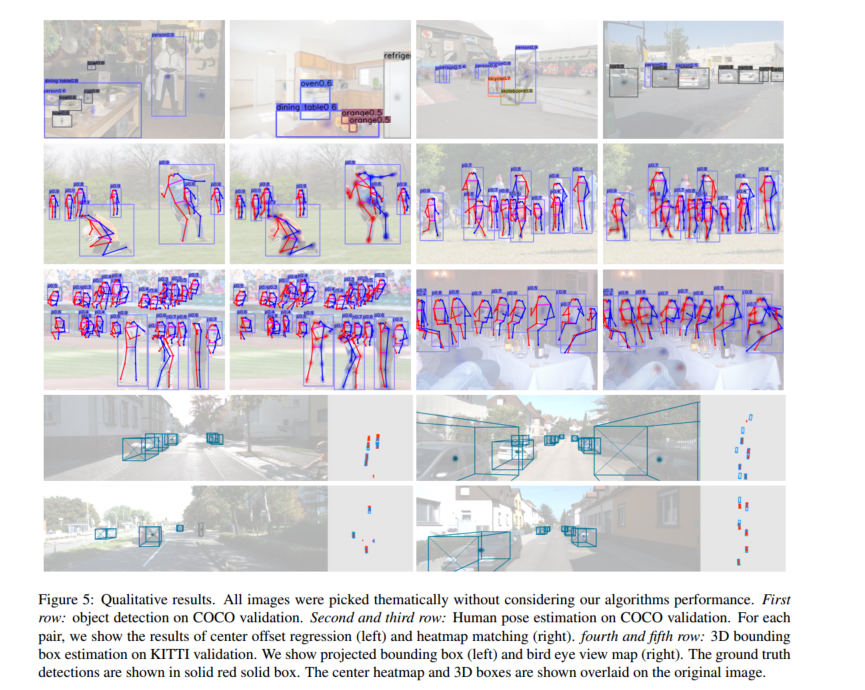
我们用 DLA-34(320 epoch,≈3 天/8 GPU 收敛)和 Hourglass-104(150 epoch,≈8 天/5 GPU 收敛),所有额外损失权重设 1,其它超参同检测。表 5 显示:直接回归关节点表现尚可但难进高 IoU;将回归值映射到最近热图检测点后,AP 大幅提升,与最先进的多人体姿态方法 [4,21,39,41] 相当,验证了 CenterNet 的通用性和易适应性。图 5 给出各任务的定性示例。
结论
综上所述,我们提出了一种新的物体表示方式:将物体视为点(points)。我们的 CenterNet 目标检测器基于已有的关键点估计网络,定位物体中心点,并回归其尺寸。该算法简单、快速、准确,并且端到端可微分,无需任何 NMS 后处理。这个思想具有通用性,可广泛应用于二维检测之外的场景。CenterNet 能在一次前向传递中估计多种额外的物体属性,例如姿态、三维朝向、深度和范围。我们的初步实验结果令人鼓舞,并为实时物体识别及相关任务开启了新的研究方向。
相关文章:
作为点的对象CenterNet论文阅读
摘要 检测器将图像中的物体表示为轴对齐的边界框。大多数成功的目标检测方法都会枚举几乎完整的潜在目标位置列表,并对每一个位置进行分类。这种做法既浪费又低效,并且需要额外的后处理。在本文中,我们采取了不同的方法。我们将物体建模为单…...

基于Java项目的Karate API测试
Karate 实现了可以只编写Feature 文件进行测试,但是对于熟悉Java语言的开发或是测试人员,可以通过编程方式集成 Karate 丰富的自动化和数据断言功能。 本篇快速介绍在Java Maven项目中编写和运行测试的示例。 创建Maven项目 最简单的创建项目的方式就是创建一个目录,里面…...

自定义线程池1.2
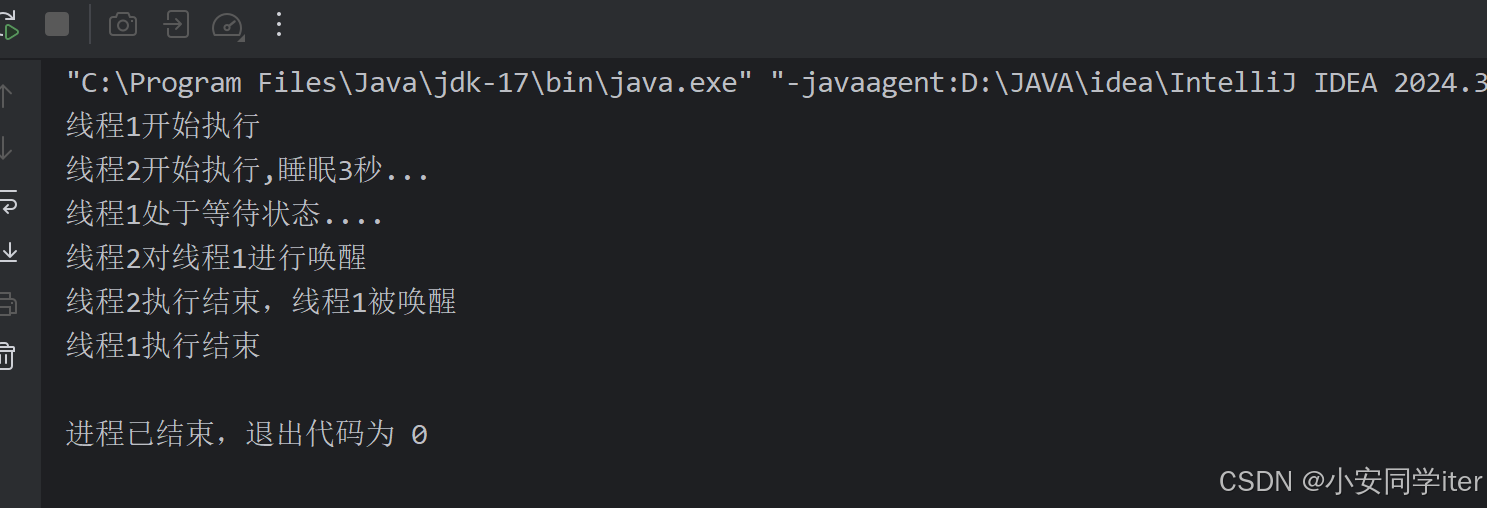
自定义线程池 1.2 1. 简介 上次我们实现了 1.1 版本,将线程池中的线程数量交给使用者决定,并且将线程的创建延迟到任务提交的时候,在本文中我们将对这个版本进行如下的优化: 在新建线程时交给线程一个任务。让线程在某种情况下…...

Spring事务传播机制有哪些?
导语: Spring事务传播机制是后端面试中的必考知识点,特别容易出现在“项目细节挖掘”阶段。面试官通过它来判断你是否真正理解事务控制的本质与异常传播机制。本文将从实战与源码角度出发,全面剖析Spring事务传播机制,帮助你答得有…...
使用ch340继电器完成随机断电测试
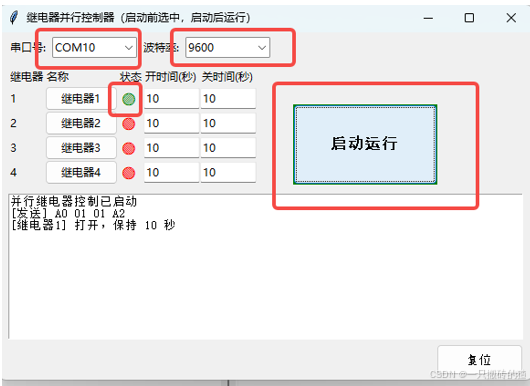
前言 如图所示是市面上常见的OTA压测继电器,通过ch340串口模块完成对继电器的分路控制,这里我编写了一个脚本方便对4路继电器的控制,可以设置开启时间,关闭时间,复位等功能 软件界面 在设备管理器查看串口号后&…...
基于谷歌ADK的 智能产品推荐系统(2): 模块功能详解
在我的上一篇博客:基于谷歌ADK的 智能产品推荐系统(1): 功能简介-CSDN博客 中我们介绍了个性化购物 Agent 项目,该项目展示了一个强大的框架,旨在模拟和实现在线购物环境中的智能导购。它不仅仅是一个简单的聊天机器人,更是一个集…...

VSCode 没有添加Windows右键菜单
关键字:VSCode;Windows右键菜单;注册表。 文章目录 前言一、工程环境二、配置流程1.右键文件打开2.右键文件夹打开3.右键空白处打开文件夹 三、测试总结 前言 安装 VSCode 时没有注意,实际使用的时候发现 VSCode 在 Windows 菜单栏…...

vxe-table vue 表格复选框多选数据,实现快捷键 Shift 批量选择功能
vxe-table vue 表格复选框多选数据,实现快捷键 Shift 批量选择功能 查看官网:https://vxetable.cn 效果 代码 通过 checkbox-config.isShift 启用批量选中,启用后按住快捷键和鼠标批量选取 <template><div><vxe-grid v-bind"gri…...
Android Framework预装traceroute执行文件到system/bin下
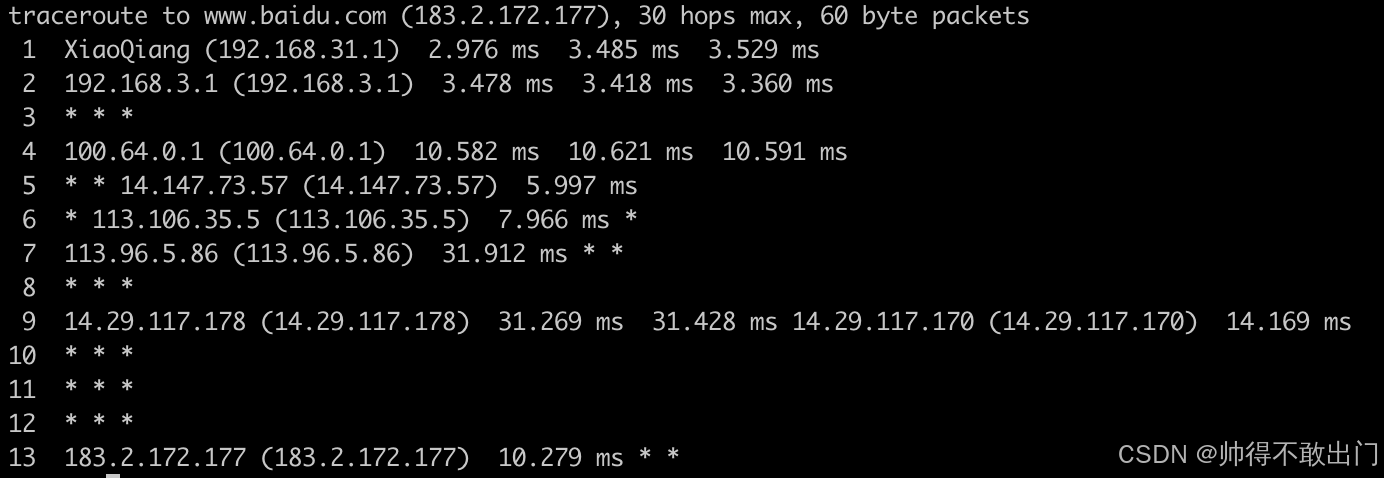
文章目录 Android SDK中寻找traceroute代码内置traceroute到SDK中traceroute参数说明-I 参数(使用 ICMP Echo 请求)-T 参数(使用 TCP SYN 包) 相关文章 Android SDK中寻找traceroute代码 设备使用的是Android 11,在/s…...

生信服务器 | 做生信为什么推荐使用Linux服务器?
原文链接:生信服务器 | 做生信为什么推荐使用Linux服务器? 一、 做生信为什么推荐使用服务器? 大家好,我是小杜。在做生信分析的同学,或是将接触学习生信分析的同学,<font style"color:rgb(53, 1…...
react-pdf(pdfjs-dist)如何兼容老浏览器(chrome 49)
之前都是使用react-pdf来渲染pdf文件,这次有个需求是要兼容xp环境,xp上chrome最高支持到49,虽然说iframe或者embed都可以实现预览pdf,但为了后续的定制化需求,还是需要使用js库来渲染。 chrome 49测试环境 能用的测试…...

RKNN开发环境搭建2-RKNN Model Zoo 环境搭建
目录 1.简介2.环境搭建2.1 启动 docker 环境2.2 安装依赖工具2.3 下载 RKNN Model Zoo2.4 RKNN模型转化2.5编译C++1.简介 RKNN Model Zoo基于 RKNPU SDK 工具链开发, 提供了目前主流算法的部署例程. 例程包含导出RKNN模型, 使用 Python API, CAPI 推理 RKNN 模型的流程. 本…...

AT模式下的全局锁冲突如何解决?
一、全局锁冲突解决方案 1. 业务层重试机制(推荐方案) Service public class OrderService {GlobalTransactionalRetryable(maxAttempts 3, backoff Backoff(delay 100))public void createOrder(OrderDTO order) {// 库存扣减(自动加全…...
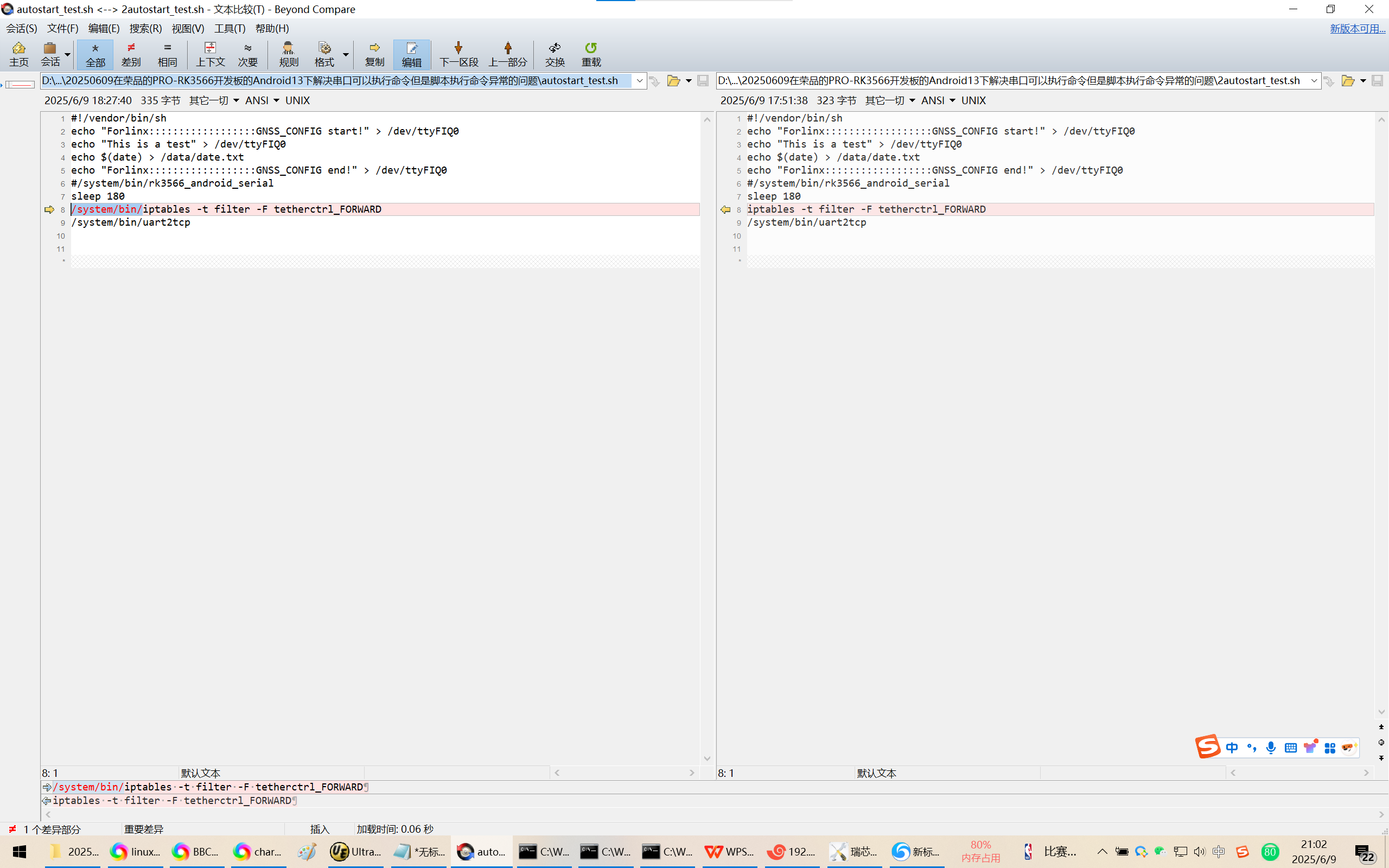
20250609在荣品的PRO-RK3566开发板的Android13下解决串口可以执行命令但是脚本执行命令异常的问题
20250609在荣品的PRO-RK3566开发板的Android13下解决串口可以执行命令但是脚本执行命令异常的问题 2025/6/9 20:54 缘起,为了跨网段推流,千辛万苦配置好了网络参数。 但是命令iptables -t filter -F tetherctrl_FORWARD可以在调试串口/DEBUG口正确执行。…...

[QMT量化交易小白入门]-六十二、ETF轮动中简单的评分算法如何获取历史年化收益32.7%
本专栏主要是介绍QMT的基础用法,常见函数,写策略的方法,也会分享一些量化交易的思路,大概会写100篇左右。 QMT的相关资料较少,在使用过程中不断的摸索,遇到了一些问题,记录下来和大家一起沟通,共同进步。 文章目录 相关阅读1. 策略概述2. 趋势评分模块3 代码解析4 木头…...
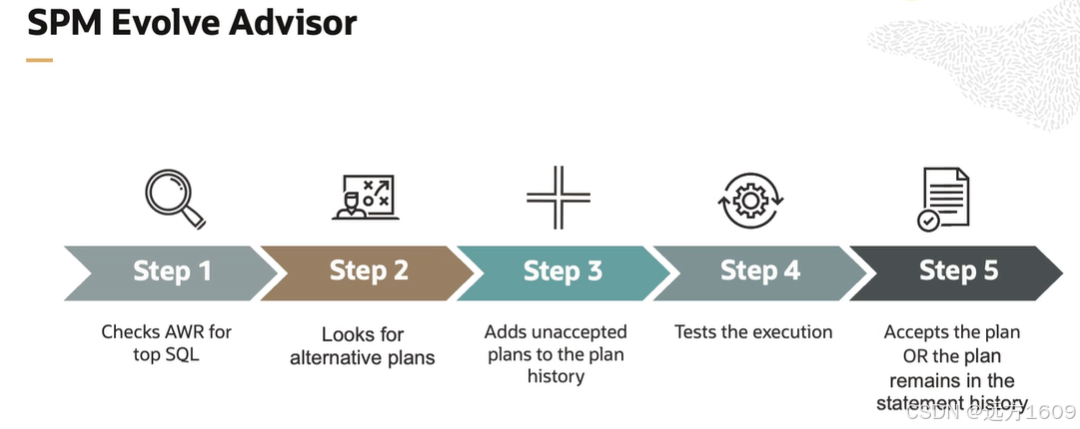
21-Oracle 23 ai-Automatic SQL Plan Management(SPM)
小伙伴们,有没有迁移数据库完毕后或是突然某一天在同一个实例上同样的SQL, 性能不一样了、业务反馈卡顿、业务超时等各种匪夷所思的现状。 于是SPM定位开始,OCM考试中SPM必考。 其他的AWR、ASH、SQLHC、SQLT、SQL profile等换作下一个话题…...
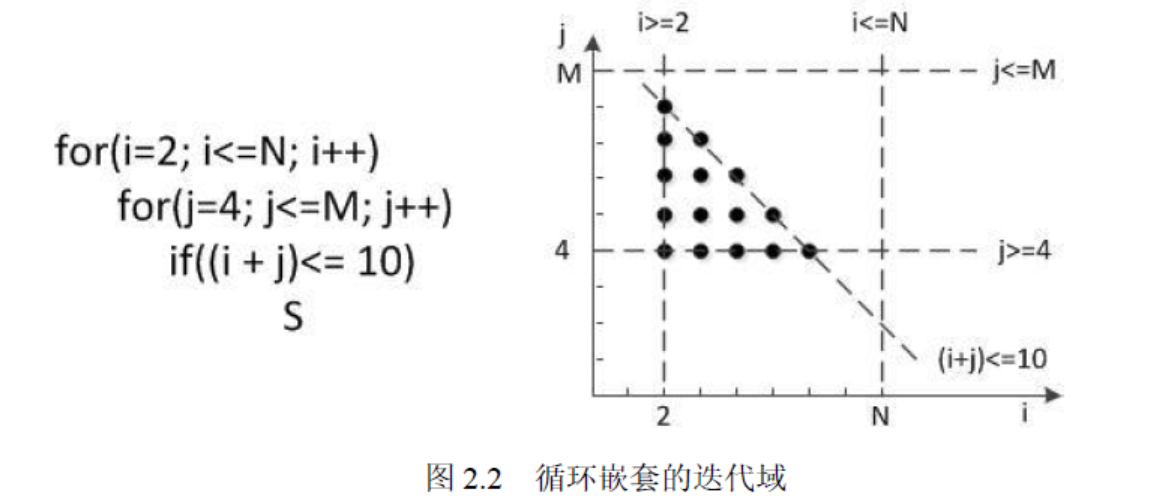
性能优化中,多面体模型基本原理
1)多面体编译技术是一种基于多面体模型的程序分析和优化技术,它将程序 中的语句实例、访问关系、依赖关系和调度等信息映射到多维空间中的几何对 象,通过对这些几何对象进行几何操作和线性代数计算来进行程序的分析和优 化。 其中࿰…...

【Zephyr 系列 16】构建 BLE + LoRa 协同通信系统:网关转发与混合调度实战
🧠关键词:Zephyr、BLE、LoRa、混合通信、事件驱动、网关中继、低功耗调度 📌面向读者:希望将 BLE 和 LoRa 结合应用于资产追踪、环境监测、远程数据采集等场景的开发者 📊篇幅预计:5300+ 字 🧭 背景与需求 在许多 IoT 项目中,单一通信方式往往难以兼顾近场数据采集…...
二维数组 行列混淆区分 js
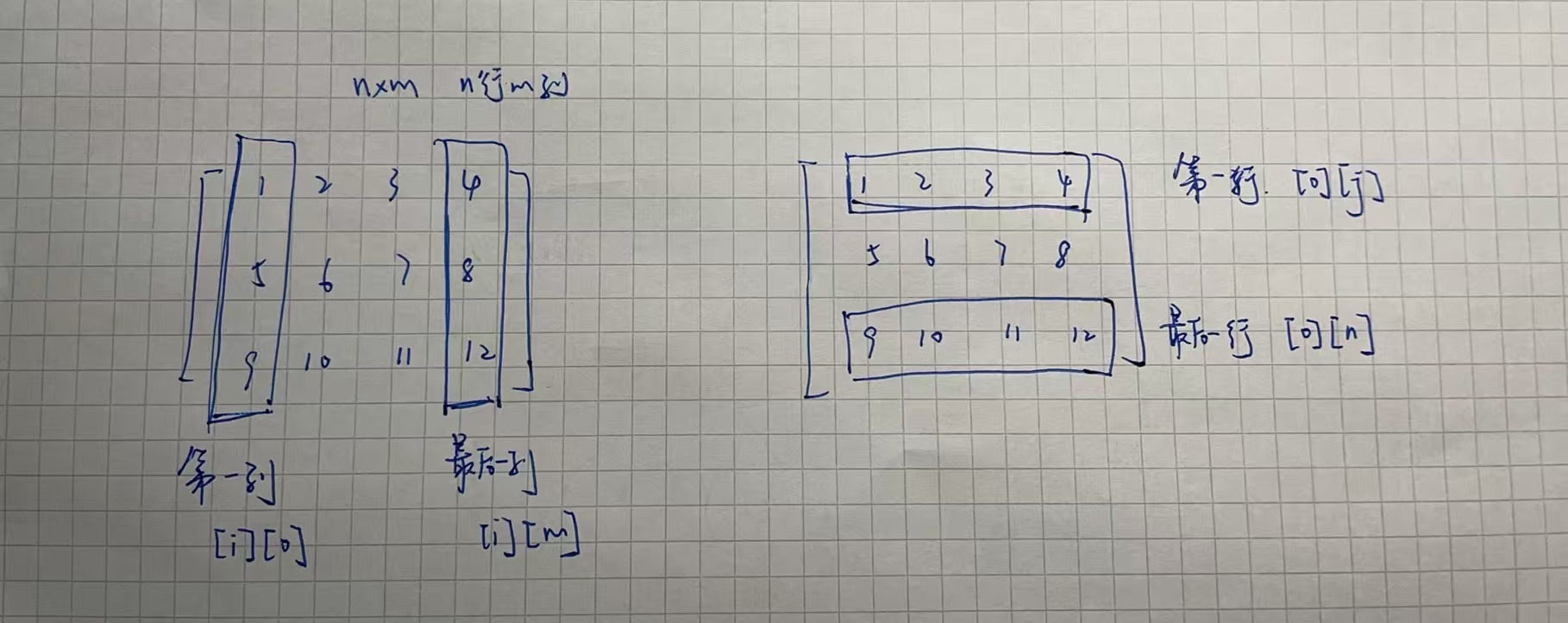
二维数组定义 行 row:是“横着的一整行” 列 column:是“竖着的一整列” 在 JavaScript 里访问二维数组 grid[i][j] 表示 第i行第j列的元素 let grid [[1, 2, 3], // 第0行[4, 5, 6], // 第1行[7, 8, 9] // 第2行 ];// grid[i][j] 表示 第i行第j列的…...

HTML版英语学习系统
HTML版英语学习系统 这是一个完全免费、无需安装、功能完整的英语学习工具,使用HTML CSS JavaScript实现。 功能 文本朗读练习 - 输入英文文章,系统朗读帮助练习听力和发音,适合跟读练习,模仿学习;实时词典查询 - 双…...
【threejs】每天一个小案例讲解:创建基本的3D场景
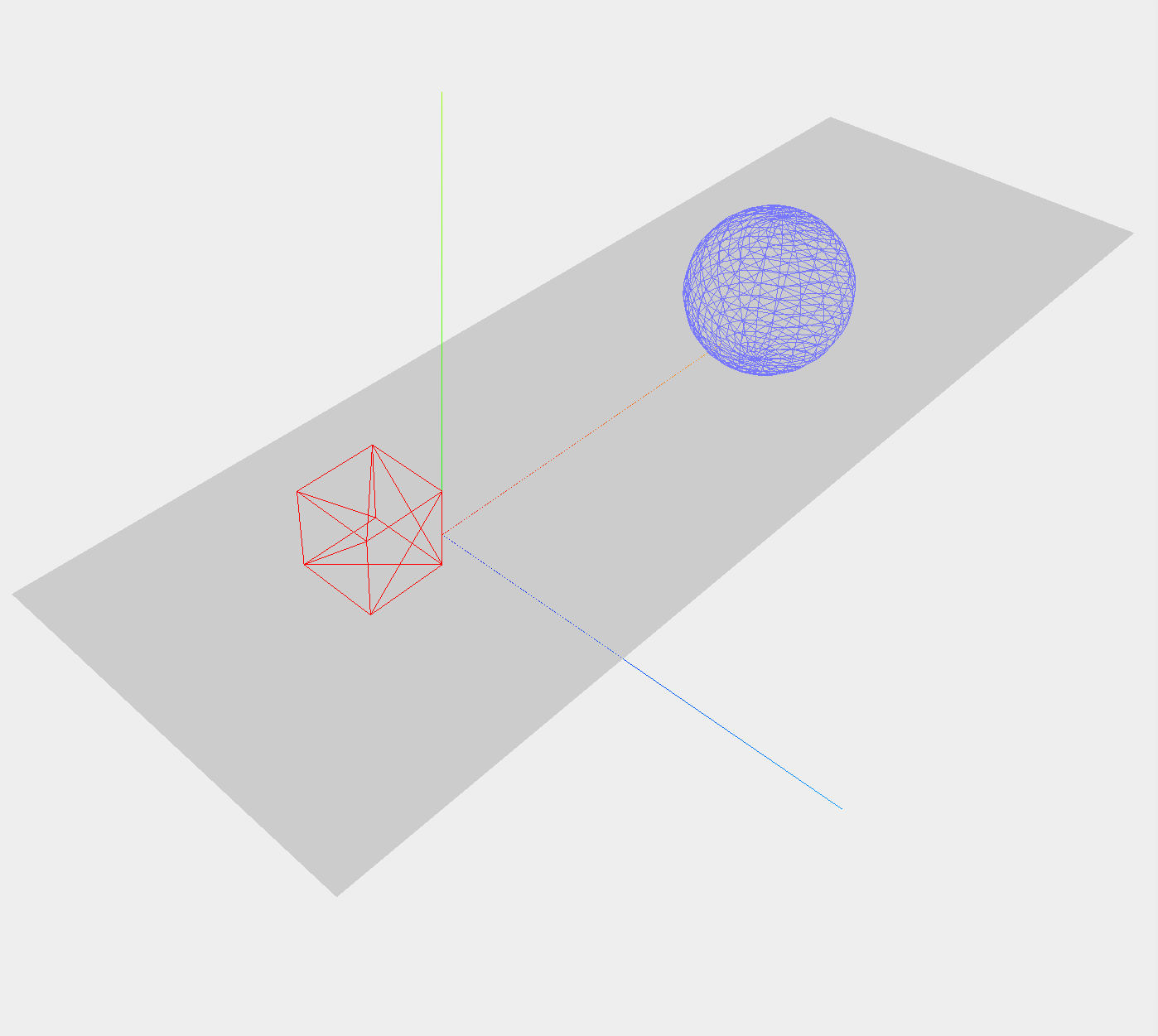
代码仓 GitHub - TiffanyHoo/three_practices: Learning three.js together! 可自行clone,无需安装依赖,直接liver-server运行/直接打开chapter01中的html文件 运行效果图 知识要点 核心三要素 场景(Scene) 使用 THREE.Scene(…...

C#中用于控制自定义特性(Attribute)
我们来详细解释一下 [AttributeUsage(AttributeTargets.Class, AllowMultiple false, Inherited false)] 这个 C# 属性。 在 C# 中,Attribute(特性)是一种用于向程序元素(如类、方法、属性等)添加元数据的机制。Attr…...

2025 后端自学UNIAPP【项目实战:旅游项目】7、景点详情页面【完结】
1、获取景点详情的请求【my_api.js】 // 引入公共的请求封装 import http from ./my_http.js// 登录接口(适配服务端返回 Token) export const login async (code, avatar) > {const res await http(/login/getWXSessionKey, {code,avatar}); };//…...

项目进度管理软件是什么?项目进度管理软件有哪些核心功能?
无论是建筑施工、软件开发,还是市场营销活动,项目往往涉及多个团队、大量资源和严格的时间表。如果没有一个系统化的工具来跟踪和管理这些元素,项目很容易陷入混乱,导致进度延误、成本超支,甚至失败。 项目进度管理软…...
)
iOS 项目怎么构建稳定性保障机制?一次系统性防错经验分享(含 KeyMob 工具应用)
崩溃、内存飙升、后台任务未释放、页面卡顿、日志丢失——稳定性问题,不一定会立刻崩,但一旦积累,就是“上线后救不回来的代价”。 稳定性保障不是某个工具的功能,而是一套贯穿开发、测试、上线全流程的“观测分析防范”机制。 …...

02-性能方案设计
需求分析与测试设计 根据具体的性能测试需求,确定测试类型,以及压测的模块(web/mysql/redis/系统整体)前期要与相关人员充分沟通,初步确定压测方案及具体的性能指标QA完成性能测试设计后,需产出测试方案文档发送邮件到项目组&…...
)
window 显示驱动开发-如何查询视频处理功能(三)
D3DDDICAPS_GETPROCAMPRANGE请求类型 UMD 返回指向 DXVADDI_VALUERANGE 结构的指针,该结构包含特定视频流上特定 ProcAmp 控件属性允许的值范围。 Direct3D 运行时在D3DDDIARG_GETCAPS的 pInfo 成员指向的变量中为特定视频流的 ProcAmp 控件属性指定DXVADDI_QUER…...
)
MySQL基本操作(续)
第3章:MySQL基本操作(续) 3.3 表操作 表是关系型数据库中存储数据的基本结构,由行和列组成。在MySQL中,表操作包括创建表、查看表结构、修改表和删除表等。本节将详细介绍这些操作。 3.3.1 创建表 在MySQL中&#…...
JUC并发编程(二)Monitor/自旋/轻量级/锁膨胀/wait/notify/锁消除
目录 一 基础 1 概念 2 卖票问题 3 转账问题 二 锁机制与优化策略 0 Monitor 1 轻量级锁 2 锁膨胀 3 自旋 4 偏向锁 5 锁消除 6 wait /notify 7 sleep与wait的对比 8 join原理 一 基础 1 概念 临界区 一段代码块内如果存在对共享资源的多线程读写操作…...

SpringCloud优势
目录 完善的微服务支持 高可用性和容错性 灵活的配置管理 强大的服务网关 分布式追踪能力 丰富的社区生态 易于与其他技术栈集成 完善的微服务支持 Spring Cloud 提供了一整套工具和组件来支持微服务架构的开发,包括服务注册与发现、负载均衡、断路器、配置管理等功能…...