三体问题详解
从物理学角度,三体问题之所以不稳定,是因为三个天体在万有引力作用下相互作用,形成一个非线性耦合系统。我们可以从牛顿经典力学出发,列出具体的运动方程,并说明为何这个系统本质上是混沌的,无法得到一般解析解。
🧭 问题设定:三体系统的基本假设
假设我们有三个质量分别为 m 1 , m 2 , m 3 m_1, m_2, m_3 m1,m2,m3 的天体,位置向量分别为:
- r 1 ( t ) \mathbf{r}_1(t) r1(t)
- r 2 ( t ) \mathbf{r}_2(t) r2(t)
- r 3 ( t ) \mathbf{r}_3(t) r3(t)
在牛顿引力定律下,每个天体受到其余两个天体的引力,总加速度由牛顿第二定律( F = m a \mathbf{F} = m\mathbf{a} F=ma)给出。
📐 一般形式的运动方程(牛顿引力 + 牛顿第二定律)
对第一个天体 m 1 m_1 m1,其加速度为:
m 1 d 2 r 1 d t 2 = G m 1 m 2 ∣ r 2 − r 1 ∣ 3 ( r 2 − r 1 ) + G m 1 m 3 ∣ r 3 − r 1 ∣ 3 ( r 3 − r 1 ) m_1 \frac{d^2 \mathbf{r}_1}{dt^2} = G \frac{m_1 m_2}{|\mathbf{r}_2 - \mathbf{r}_1|^3} (\mathbf{r}_2 - \mathbf{r}_1) + G \frac{m_1 m_3}{|\mathbf{r}_3 - \mathbf{r}_1|^3} (\mathbf{r}_3 - \mathbf{r}_1) m1dt2d2r1=G∣r2−r1∣3m1m2(r2−r1)+G∣r3−r1∣3m1m3(r3−r1)
类似地,对 m 2 , m 3 m_2, m_3 m2,m3 分别有:
m 2 d 2 r 2 d t 2 = G m 2 m 1 ∣ r 1 − r 2 ∣ 3 ( r 1 − r 2 ) + G m 2 m 3 ∣ r 3 − r 2 ∣ 3 ( r 3 − r 2 ) m_2 \frac{d^2 \mathbf{r}_2}{dt^2} = G \frac{m_2 m_1}{|\mathbf{r}_1 - \mathbf{r}_2|^3} (\mathbf{r}_1 - \mathbf{r}_2) + G \frac{m_2 m_3}{|\mathbf{r}_3 - \mathbf{r}_2|^3} (\mathbf{r}_3 - \mathbf{r}_2) m2dt2d2r2=G∣r1−r2∣3m2m1(r1−r2)+G∣r3−r2∣3m2m3(r3−r2)
m 3 d 2 r 3 d t 2 = G m 3 m 1 ∣ r 1 − r 3 ∣ 3 ( r 1 − r 3 ) + G m 3 m 2 ∣ r 2 − r 3 ∣ 3 ( r 2 − r 3 ) m_3 \frac{d^2 \mathbf{r}_3}{dt^2} = G \frac{m_3 m_1}{|\mathbf{r}_1 - \mathbf{r}_3|^3} (\mathbf{r}_1 - \mathbf{r}_3) + G \frac{m_3 m_2}{|\mathbf{r}_2 - \mathbf{r}_3|^3} (\mathbf{r}_2 - \mathbf{r}_3) m3dt2d2r3=G∣r1−r3∣3m3m1(r1−r3)+G∣r2−r3∣3m3m2(r2−r3)
⚠️ 为什么不稳定?
1. 非线性耦合微分方程组
这三组式子彼此高度耦合:每个加速度都依赖于另外两个天体的位置,而且这种依赖是非线性(距离的三次方在分母)。
这是典型的非线性二阶常微分方程组,形式上如下:
d 2 r i d t 2 = ∑ j ≠ i G m j r j − r i ∣ r j − r i ∣ 3 , i = 1 , 2 , 3 \frac{d^2 \mathbf{r}_i}{dt^2} = \sum_{j \ne i} G m_j \frac{\mathbf{r}_j - \mathbf{r}_i}{|\mathbf{r}_j - \mathbf{r}_i|^3}, \quad i = 1,2,3 dt2d2ri=j=i∑Gmj∣rj−ri∣3rj−ri,i=1,2,3
这种系统存在如下三大特性:
- 不可分解成单体运动 + 微扰项
- 无法通过代数方法求出通解
- 随时间演化会展现出对初始条件的极度敏感
2. 初始条件敏感性(混沌特征)
在数值模拟中,即使两个三体系统初始位置差异为 10 − 10 10^{-10} 10−10 米,几十个周期后轨道会完全不同。
这是混沌系统的定义特征:
初始条件微小扰动会被放大,导致长期行为完全不可预测。
3. 守恒定律约束不足以稳定系统
虽然系统满足以下守恒定律:
-
总动量守恒:
∑ i = 1 3 m i d r i d t = 常量 \sum_{i=1}^3 m_i \frac{d \mathbf{r}_i}{dt} = \text{常量} i=1∑3midtdri=常量
-
总能量守恒:
E = ∑ i = 1 3 1 2 m i v i 2 − ∑ i < j G m i m j ∣ r i − r j ∣ E = \sum_{i=1}^3 \frac{1}{2} m_i v_i^2 - \sum_{i<j} \frac{G m_i m_j}{|\mathbf{r}_i - \mathbf{r}_j|} E=i=1∑321mivi2−i<j∑∣ri−rj∣Gmimj
但这些守恒量(常数)无法限制轨道在高维空间的发散演化,只是提供一些“整体约束”。
📉 所以为什么不能稳定运行?
从物理角度总结三点:
- 多体引力是非线性且时变的力学系统;
- 无解析解(除极少对称情况),必须数值求解;
- 即使数值解,也极度依赖初始条件,最终表现为混沌轨道;
🎯 实际结果是什么?
小说中三体行星文明面临的核心困境——无法预测三颗恒星的运动。正是这个真实的物理问题,使得三体文明的“乱纪元”和“恒纪元”交替成为必然,也解释了为什么他们需要寻找新的家园。数值模拟证实了这种不稳定性是三体系统的内在属性,而非外部干扰的结果。
三体运动的模拟动画
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
import matplotlib.patches as patches
from matplotlib.widgets import Button
from collections import deque# 设置中文字体
plt.rcParams['font.sans-serif'] = ['SimHei', 'DejaVu Sans']
plt.rcParams['axes.unicode_minus'] = Falseclass ThreeBodySystem:def __init__(self, masses, positions, velocities, G=1.0):"""三体系统masses: [m1, m2, m3] 三个天体的质量positions: [[x1,y1], [x2,y2], [x3,y3]] 初始位置velocities: [[vx1,vy1], [vx2,vy2], [vx3,vy3]] 初始速度G: 引力常数"""self.masses = np.array(masses)self.positions = np.array(positions, dtype=float)self.velocities = np.array(velocities, dtype=float)self.G = G# 轨迹历史记录 - 为每个天体单独记录self.trail_length = 800self.trails = [deque(maxlen=self.trail_length) for _ in range(3)]# 初始化轨迹记录for i in range(3):self.trails[i].append([self.positions[i][0], self.positions[i][1]])self.dt = 0.005 # 基础时间步长self.speed_multiplier = 1.0 # 速度倍数self.time = 0# 天体属性self.colors = ['#FF6B35', '#004E89', '#00A86B'] # 橙色、深蓝、绿色self.names = ['恒星Alpha', '恒星Beta', '恒星Gamma']self.base_sizes = [300, 250, 280]# 统计数据记录self.energy_history = deque(maxlen=500)self.distance_history = {'AB': deque(maxlen=500),'AC': deque(maxlen=500),'BC': deque(maxlen=500)}def set_speed_multiplier(self, multiplier):"""设置速度倍数"""self.speed_multiplier = max(0.1, min(10.0, multiplier))def compute_gravitational_forces(self):"""计算每个天体受到的引力"""forces = np.zeros_like(self.positions)for i in range(3):for j in range(3):if i != j:# 位置差矢量: 从i指向jr_vec = self.positions[j] - self.positions[i]r_magnitude = np.linalg.norm(r_vec)# 避免数值奇点if r_magnitude > 1e-8:# 万有引力: F = G*m1*m2/r^2 * 单位矢量force_magnitude = self.G * self.masses[i] * self.masses[j] / (r_magnitude ** 3)forces[i] += force_magnitude * r_vecreturn forcesdef runge_kutta_4th_order(self):"""四阶龙格-库塔法数值积分(带速度控制)"""effective_dt = self.dt * self.speed_multiplier# 当前状态pos = self.positions.copy()vel = self.velocities.copy()# k1 计算k1_vel = velk1_acc = self.compute_gravitational_forces() / self.masses.reshape(-1, 1)# k2 计算pos_k2 = pos + 0.5 * effective_dt * k1_velself.positions = pos_k2 # 临时更新位置用于力计算k2_vel = vel + 0.5 * effective_dt * k1_acck2_acc = self.compute_gravitational_forces() / self.masses.reshape(-1, 1)# k3 计算pos_k3 = pos + 0.5 * effective_dt * k2_velself.positions = pos_k3k3_vel = vel + 0.5 * effective_dt * k2_acck3_acc = self.compute_gravitational_forces() / self.masses.reshape(-1, 1)# k4 计算pos_k4 = pos + effective_dt * k3_velself.positions = pos_k4k4_vel = vel + effective_dt * k3_acck4_acc = self.compute_gravitational_forces() / self.masses.reshape(-1, 1)# 最终更新self.positions = pos + effective_dt * (k1_vel + 2 * k2_vel + 2 * k3_vel + k4_vel) / 6self.velocities = vel + effective_dt * (k1_acc + 2 * k2_acc + 2 * k3_acc + k4_acc) / 6# 记录轨迹for i in range(3):self.trails[i].append([self.positions[i][0], self.positions[i][1]])self.time += effective_dtdef calculate_total_energy(self):"""计算系统总能量(动能+势能)"""# 动能kinetic_energy = 0for i in range(3):v_squared = np.sum(self.velocities[i] ** 2)kinetic_energy += 0.5 * self.masses[i] * v_squared# 引力势能potential_energy = 0for i in range(3):for j in range(i + 1, 3):r = np.linalg.norm(self.positions[i] - self.positions[j])if r > 1e-8:potential_energy -= self.G * self.masses[i] * self.masses[j] / rreturn kinetic_energy + potential_energydef update_statistics(self):"""更新统计数据"""# 总能量energy = self.calculate_total_energy()self.energy_history.append(energy)# 天体间距离r_AB = np.linalg.norm(self.positions[0] - self.positions[1])r_AC = np.linalg.norm(self.positions[0] - self.positions[2])r_BC = np.linalg.norm(self.positions[1] - self.positions[2])self.distance_history['AB'].append(r_AB)self.distance_history['AC'].append(r_AC)self.distance_history['BC'].append(r_BC)class SpeedController:"""速度控制器类"""def __init__(self, system):self.system = systemself.speed_levels = [0.1, 0.25, 0.5, 1.0, 2.0, 4.0, 8.0]self.current_level = 3 # 默认1.0倍速def speed_up(self, event=None):"""加速"""if self.current_level < len(self.speed_levels) - 1:self.current_level += 1self.current_level = min(self.current_level, len(self.speed_levels)-1)self.system.set_speed_multiplier(self.speed_levels[self.current_level])def slow_down(self, event=None):"""减速"""if self.current_level > 0:self.current_level -= 1self.current_level = max(self.current_level, 0)self.system.set_speed_multiplier(self.speed_levels[self.current_level])def reset_speed(self, event=None):"""重置到正常速度"""self.current_level = 3self.system.set_speed_multiplier(self.speed_levels[self.current_level])def get_current_speed_text(self):"""获取当前速度显示文本"""speed = self.speed_levels[self.current_level]return f"播放速度: {speed:.1f}x"def create_three_body_animation():"""创建带速度控制的三体运动动画"""# 初始化系统 - 选择一个展现混沌特性的配置masses = [1.5, 1.0, 1.2] # 三个不同质量的恒星# 三角形初始配置,但有适当的速度产生复杂轨道positions = [[-2.0, 0.0], # Alpha星[1.0, 1.732], # Beta星[1.0, -1.732] # Gamma星]velocities = [[0.2, 0.8], # Alpha星初始速度[-0.6, -0.2], # Beta星初始速度[0.4, -0.6] # Gamma星初始速度]system = ThreeBodySystem(masses, positions, velocities, G=3.0)speed_controller = SpeedController(system)# 创建图形界面fig = plt.figure(figsize=(19, 12), facecolor='#0a0a0a')# 主动画区域 (左侧大图)ax_main = plt.subplot2grid((3, 5), (0, 0), colspan=3, rowspan=3, facecolor='#0a0a0a')# 监控面板 (右侧)ax_energy = plt.subplot2grid((3, 5), (0, 3), colspan=2, facecolor='#0a0a0a')ax_distances = plt.subplot2grid((3, 5), (1, 3), colspan=2, facecolor='#0a0a0a')ax_info = plt.subplot2grid((3, 5), (2, 3), colspan=2, facecolor='#0a0a0a')# 在底部为按钮留出空间plt.subplots_adjust(bottom=0.15)# 创建速度控制按钮button_height = 0.04button_width = 0.08button_y = 0.02# 减速按钮ax_slow = plt.axes([0.25, button_y, button_width, button_height])btn_slow = Button(ax_slow, '减速', color='#FF4444', hovercolor='#FF6666')btn_slow.label.set_color('white')btn_slow.label.set_fontweight('bold')# 重置按钮ax_reset = plt.axes([0.35, button_y, button_width, button_height])btn_reset = Button(ax_reset, '正常', color='#4CAF50', hovercolor='#6BCF7F')btn_reset.label.set_color('white')btn_reset.label.set_fontweight('bold')# 加速按钮ax_fast = plt.axes([0.45, button_y, button_width, button_height])btn_fast = Button(ax_fast, '加速', color='#2196F3', hovercolor='#42A5F5')btn_fast.label.set_color('white')btn_fast.label.set_fontweight('bold')# 暂停/继续按钮ax_pause = plt.axes([0.55, button_y, button_width, button_height])btn_pause = Button(ax_pause, '暂停', color='#FF9800', hovercolor='#FFB74D')btn_pause.label.set_color('white')btn_pause.label.set_fontweight('bold')# 速度显示文本speed_text = fig.text(0.65, button_y + button_height / 2,speed_controller.get_current_speed_text(),fontsize=12, color='white', va='center', weight='bold')# 设置主画布ax_main.set_xlim(-8, 8)ax_main.set_ylim(-8, 8)ax_main.set_aspect('equal')ax_main.set_facecolor('#0a0a0a')ax_main.tick_params(colors='white')ax_main.set_xlabel('X 坐标', color='white', fontsize=14)ax_main.set_ylabel('Y 坐标', color='white', fontsize=14)ax_main.set_title('三体问题:三颗恒星的混沌舞蹈', color='white', fontsize=16, pad=20)# 创建星空背景np.random.seed(123)star_x = np.random.uniform(-8, 8, 200)star_y = np.random.uniform(-8, 8, 200)star_sizes = np.random.uniform(0.5, 3, 200)ax_main.scatter(star_x, star_y, c='white', s=star_sizes, alpha=0.4)# 添加网格ax_main.grid(True, alpha=0.15, color='gray', linestyle='-', linewidth=0.5)# 初始化绘图元素# 1. 三个恒星天体stars = []for i in range(3):star = ax_main.scatter([], [], s=system.base_sizes[i],c=system.colors[i], edgecolors='white',linewidth=3, alpha=0.95, zorder=20)stars.append(star)# 2. 三条轨迹线orbit_trails = []for i in range(3):trail, = ax_main.plot([], [], color=system.colors[i],linewidth=2.5, alpha=0.8, zorder=10)orbit_trails.append(trail)# 3. 引力连接线gravity_lines = []gravity_colors = ['yellow', 'orange', 'red']line_pairs = [(0, 1), (0, 2), (1, 2)]for i, (a, b) in enumerate(line_pairs):line, = ax_main.plot([], [], color=gravity_colors[i],alpha=0.4, linewidth=2, linestyle='--', zorder=5)gravity_lines.append(line)# 4. 恒星标签star_labels = []for i in range(3):label = ax_main.text(0, 0, system.names[i], fontsize=12, color='white',ha='center', va='center', weight='bold',bbox=dict(boxstyle="round,pad=0.3", facecolor=system.colors[i], alpha=0.7))star_labels.append(label)# 5. 信息显示status_text = ax_main.text(0.02, 0.98, '', transform=ax_main.transAxes,fontsize=12, color='white', verticalalignment='top',bbox=dict(boxstyle="round,pad=0.5",facecolor="black", alpha=0.8))# 设置监控图表for ax in [ax_energy, ax_distances]:ax.set_facecolor('#0a0a0a')ax.tick_params(colors='white')ax.grid(True, alpha=0.3, color='gray')# 能量图ax_energy.set_title('系统总能量守恒', color='white', fontsize=12)ax_energy.set_ylabel('总能量', color='white')energy_line, = ax_energy.plot([], [], color='cyan', linewidth=2)# 距离图ax_distances.set_title('恒星间距离变化', color='white', fontsize=12)ax_distances.set_ylabel('距离', color='white')ax_distances.set_xlabel('时间步', color='white')dist_lines = {}dist_colors = ['red', 'blue', 'green']dist_labels = ['Alpha-Beta', 'Alpha-Gamma', 'Beta-Gamma']for i, key in enumerate(['AB', 'AC', 'BC']):line, = ax_distances.plot([], [], color=dist_colors[i],linewidth=2, label=dist_labels[i])dist_lines[key] = lineax_distances.legend(fontsize=10)# 信息面板ax_info.set_facecolor('#0a0a0a')ax_info.axis('off')info_display = ax_info.text(0.05, 0.95, '', transform=ax_info.transAxes,fontsize=11, color='white', verticalalignment='top')# 动画状态控制animation_paused = [False] # 使用列表以便在闭包中修改def toggle_pause(event):"""切换暂停/继续"""animation_paused[0] = not animation_paused[0]btn_pause.label.set_text('继续' if animation_paused[0] else '暂停')def update_speed_display():"""更新速度显示"""speed_text.set_text(speed_controller.get_current_speed_text())fig.canvas.draw_idle()def on_speed_up(event):speed_controller.speed_up()update_speed_display()def on_slow_down(event):speed_controller.slow_down()update_speed_display()def on_reset_speed(event):speed_controller.reset_speed()update_speed_display()# 连接按钮事件btn_fast.on_clicked(on_speed_up)btn_slow.on_clicked(on_slow_down)btn_reset.on_clicked(on_reset_speed)btn_pause.on_clicked(toggle_pause)def animate_frame(frame):# 如果暂停则不更新if animation_paused[0]:return (stars + orbit_trails + gravity_lines + star_labels +[status_text, energy_line] + list(dist_lines.values()) + [info_display])# 执行物理计算 - 每帧多步提高精度steps_per_frame = max(1, int(3 / max(0.1, system.speed_multiplier)))for _ in range(steps_per_frame):system.runge_kutta_4th_order()system.update_statistics()# 更新三个恒星的位置for i in range(3):# 更新恒星位置current_pos = system.positions[i].reshape(1, -1)stars[i].set_offsets(current_pos)# 添加脉动效果pulse = 1 + 0.2 * np.sin(system.time * 4 + i * 2)stars[i].set_sizes([system.base_sizes[i] * pulse])# 更新标签位置star_labels[i].set_position((system.positions[i][0] + 0.5,system.positions[i][1] + 0.5))# 更新轨迹for i in range(3):if len(system.trails[i]) > 1:trail_array = np.array(list(system.trails[i]))orbit_trails[i].set_data(trail_array[:, 0], trail_array[:, 1])# 更新引力连接线for i, (a, b) in enumerate(line_pairs):pos_a = system.positions[a]pos_b = system.positions[b]gravity_lines[i].set_data([pos_a[0], pos_b[0]], [pos_a[1], pos_b[1]])# 根据距离调整线条粗细和透明度distance = np.linalg.norm(pos_a - pos_b)alpha = max(0.2, min(0.8, 5.0 / distance))linewidth = max(1, min(4, 8.0 / distance))gravity_lines[i].set_alpha(alpha)gravity_lines[i].set_linewidth(linewidth)# 更新状态信息current_energy = system.calculate_total_energy()max_velocity = max([np.linalg.norm(v) for v in system.velocities])status_info = (f"模拟时间: {system.time:.2f}\n"f"播放速度: {system.speed_multiplier:.1f}x\n"f"系统总能量: {current_energy:.4f}\n"f"最大速度: {max_velocity:.3f}\n"f"计算步数: {frame * steps_per_frame}\n"f"\n三体位置坐标:\n")for i in range(3):pos = system.positions[i]vel_mag = np.linalg.norm(system.velocities[i])status_info += f"{system.names[i]}: ({pos[0]:.2f}, {pos[1]:.2f})\n"status_info += f" 速度: {vel_mag:.3f}\n"status_text.set_text(status_info)# 更新能量图if len(system.energy_history) > 1:time_points = list(range(len(system.energy_history)))energy_line.set_data(time_points, list(system.energy_history))ax_energy.relim()ax_energy.autoscale_view()# 更新距离图if len(system.distance_history['AB']) > 1:time_points = list(range(len(system.distance_history['AB'])))for key in ['AB', 'AC', 'BC']:dist_lines[key].set_data(time_points, list(system.distance_history[key]))ax_distances.relim()ax_distances.autoscale_view()# 更新信息面板min_dist = min([list(system.distance_history[key])[-1]for key in system.distance_history.keys()if len(system.distance_history[key]) > 0])info_text = ("=== 三体系统状态 ===\n\n"f"恒星质量:\n"f" {system.names[0]}: {system.masses[0]:.1f}M☉\n"f" {system.names[1]}: {system.masses[1]:.1f}M☉\n"f" {system.names[2]}: {system.masses[2]:.1f}M☉\n\n"f"最近距离: {min_dist:.3f}\n"f"引力常数: {system.G:.1f}\n\n""观察要点:\n""* 轨道的不规则性\n""* 近距离遭遇事件\n""* 能量守恒定律\n""* 混沌敏感依赖性\n\n""控制说明:\n""* 加速/减速按钮调节播放速度\n""* 暂停按钮停止/继续动画\n""* 正常按钮重置为1x速度")info_display.set_text(info_text)return (stars + orbit_trails + gravity_lines + star_labels +[status_text, energy_line] + list(dist_lines.values()) + [info_display])# 创建动画对象anim = FuncAnimation(fig, animate_frame, frames=3000,interval=30, blit=False, repeat=True, cache_frame_data=False)# 总标题fig.suptitle('三体问题数值模拟:混沌引力系统(速度可控)',fontsize=18, color='white', y=0.96)# 底部说明fig.text(0.02, 0.085,'物理原理: 三个质量不等的恒星在万有引力作用下的非周期运动 | ''混沌特征: 轨道不可预测、对初始条件敏感、长期行为无法确定 | ''数值方法: 四阶龙格-库塔法求解牛顿引力方程组',fontsize=10, color='white',bbox=dict(boxstyle="round,pad=0.5", facecolor="#1a1a2e", alpha=0.9))plt.tight_layout()plt.subplots_adjust(top=0.92, bottom=0.18)plt.show()return anim# 启动三体动画
print("🌟 启动三体恒星系统动态模拟(带速度控制)...")
print("\n系统配置:")
print("* 三颗质量不等的恒星: Alpha(1.5M☉), Beta(1.0M☉), Gamma(1.2M☉)")
print("* 初始三角形配置,赋予复杂初始速度")
print("* 高精度数值积分(RK4)确保长期稳定性")print("\n可视化特征:")
print("✓ 三个不同颜色的恒星实时运动")
print("✓ 彩色轨迹显示历史路径")
print("✓ 虚线显示引力相互作用")
print("✓ 恒星大小脉动模拟真实效果")
print("✓ 实时监控能量守恒和距离变化")print("\n新增速度控制功能:")
print("🎮 减速按钮: 降低播放速度(0.1x-8x)")
print("🎮 加速按钮: 提高播放速度(0.1x-8x)")
print("🎮 正常按钮: 重置为1x正常速度")
print("🎮 暂停按钮: 暂停/继续动画播放")
print("🎮 实时速度显示: 当前播放倍数")print("\n观察重点:")
print("🔍 轨道的复杂性和不可预测性")
print("🔍 恒星间距离的剧烈变化")
print("🔍 近距离遭遇引起的轨道突变")
print("🔍 系统总能量的精确守恒")print("\n操作提示:")
print("💡 使用加速功能快速观察长期行为")
print("💡 使用减速功能仔细研究细节变化")
print("💡 暂停功能方便截图和观察")print("\n正在加载动画...")# 运行动画
animation = create_three_body_animation()print("🎬 三体动画已启动!使用底部按钮控制播放速度...")
参考
- 三体问题究竟是什么?为什么说科学的尽头是神学?
相关文章:

三体问题详解
从物理学角度,三体问题之所以不稳定,是因为三个天体在万有引力作用下相互作用,形成一个非线性耦合系统。我们可以从牛顿经典力学出发,列出具体的运动方程,并说明为何这个系统本质上是混沌的,无法得到一般解…...

Rust 异步编程
Rust 异步编程 引言 Rust 是一种系统编程语言,以其高性能、安全性以及零成本抽象而著称。在多核处理器成为主流的今天,异步编程成为了一种提高应用性能、优化资源利用的有效手段。本文将深入探讨 Rust 异步编程的核心概念、常用库以及最佳实践。 异步编程基础 什么是异步…...
)
WEB3全栈开发——面试专业技能点P2智能合约开发(Solidity)
一、Solidity合约开发 下面是 Solidity 合约开发 的概念、代码示例及讲解,适合用作学习或写简历项目背景说明。 🧠 一、概念简介:Solidity 合约开发 Solidity 是一种专门为 以太坊(Ethereum)平台编写智能合约的高级编…...

LLM基础1_语言模型如何处理文本
基于GitHub项目:https://github.com/datawhalechina/llms-from-scratch-cn 工具介绍 tiktoken:OpenAI开发的专业"分词器" torch:Facebook开发的强力计算引擎,相当于超级计算器 理解词嵌入:给词语画"…...
BCS 2025|百度副总裁陈洋:智能体在安全领域的应用实践
6月5日,2025全球数字经济大会数字安全主论坛暨北京网络安全大会在国家会议中心隆重开幕。百度副总裁陈洋受邀出席,并作《智能体在安全领域的应用实践》主题演讲,分享了在智能体在安全领域的突破性实践。他指出,百度通过将安全能力…...

leetcodeSQL解题:3564. 季节性销售分析
leetcodeSQL解题:3564. 季节性销售分析 题目: 表:sales ---------------------- | Column Name | Type | ---------------------- | sale_id | int | | product_id | int | | sale_date | date | | quantity | int | | price | decimal | -…...

Ascend NPU上适配Step-Audio模型
1 概述 1.1 简述 Step-Audio 是业界首个集语音理解与生成控制一体化的产品级开源实时语音对话系统,支持多语言对话(如 中文,英文,日语),语音情感(如 开心,悲伤)&#x…...

Axios请求超时重发机制
Axios 超时重新请求实现方案 在 Axios 中实现超时重新请求可以通过以下几种方式: 1. 使用拦截器实现自动重试 import axios from axios;// 创建axios实例 const instance axios.create();// 设置超时时间 instance.defaults.timeout 5000;// 最大重试次数 cons…...

Python如何给视频添加音频和字幕
在Python中,给视频添加音频和字幕可以使用电影文件处理库MoviePy和字幕处理库Subtitles。下面将详细介绍如何使用这些库来实现视频的音频和字幕添加,包括必要的代码示例和详细解释。 环境准备 在开始之前,需要安装以下Python库:…...

大模型多显卡多服务器并行计算方法与实践指南
一、分布式训练概述 大规模语言模型的训练通常需要分布式计算技术,以解决单机资源不足的问题。分布式训练主要分为两种模式: 数据并行:将数据分片到不同设备,每个设备拥有完整的模型副本 模型并行:将模型分割到不同设备,每个设备处理部分模型计算 现代大模型训练通常结合…...

Spring AI 入门:Java 开发者的生成式 AI 实践之路
一、Spring AI 简介 在人工智能技术快速迭代的今天,Spring AI 作为 Spring 生态系统的新生力量,正在成为 Java 开发者拥抱生成式 AI 的最佳选择。该框架通过模块化设计实现了与主流 AI 服务(如 OpenAI、Anthropic)的无缝对接&…...
【Java_EE】Spring MVC
目录 Spring Web MVC 编辑注解 RestController RequestMapping RequestParam RequestParam RequestBody PathVariable RequestPart 参数传递 注意事项 编辑参数重命名 RequestParam 编辑编辑传递集合 RequestParam 传递JSON数据 编辑RequestBody …...

【C语言练习】080. 使用C语言实现简单的数据库操作
080. 使用C语言实现简单的数据库操作 080. 使用C语言实现简单的数据库操作使用原生APIODBC接口第三方库ORM框架文件模拟1. 安装SQLite2. 示例代码:使用SQLite创建数据库、表和插入数据3. 编译和运行4. 示例运行输出:5. 注意事项6. 总结080. 使用C语言实现简单的数据库操作 在…...
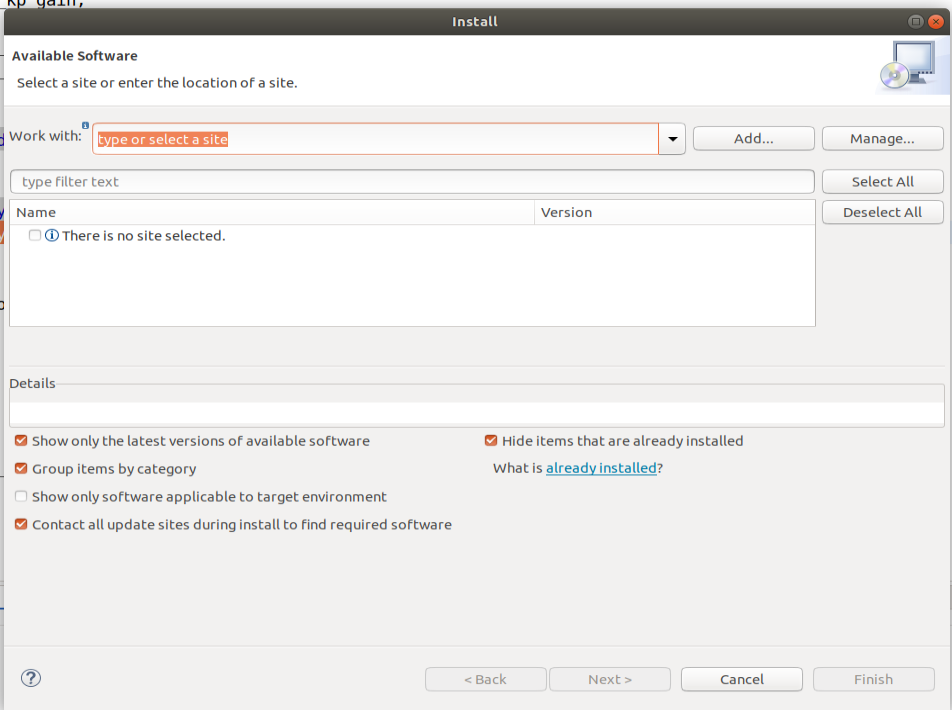
ardupilot 开发环境eclipse 中import 缺少C++
目录 文章目录 目录摘要1.修复过程摘要 本节主要解决ardupilot 开发环境eclipse 中import 缺少C++,无法导入ardupilot代码,会引起查看不方便的问题。如下图所示 1.修复过程 0.安装ubuntu 软件中自带的eclipse 1.打开eclipse—Help—install new software 2.在 Work with中…...

拉力测试cuda pytorch 把 4070显卡拉满
import torch import timedef stress_test_gpu(matrix_size16384, duration300):"""对GPU进行压力测试,通过持续的矩阵乘法来最大化GPU利用率参数:matrix_size: 矩阵维度大小,增大可提高计算复杂度duration: 测试持续时间(秒&…...
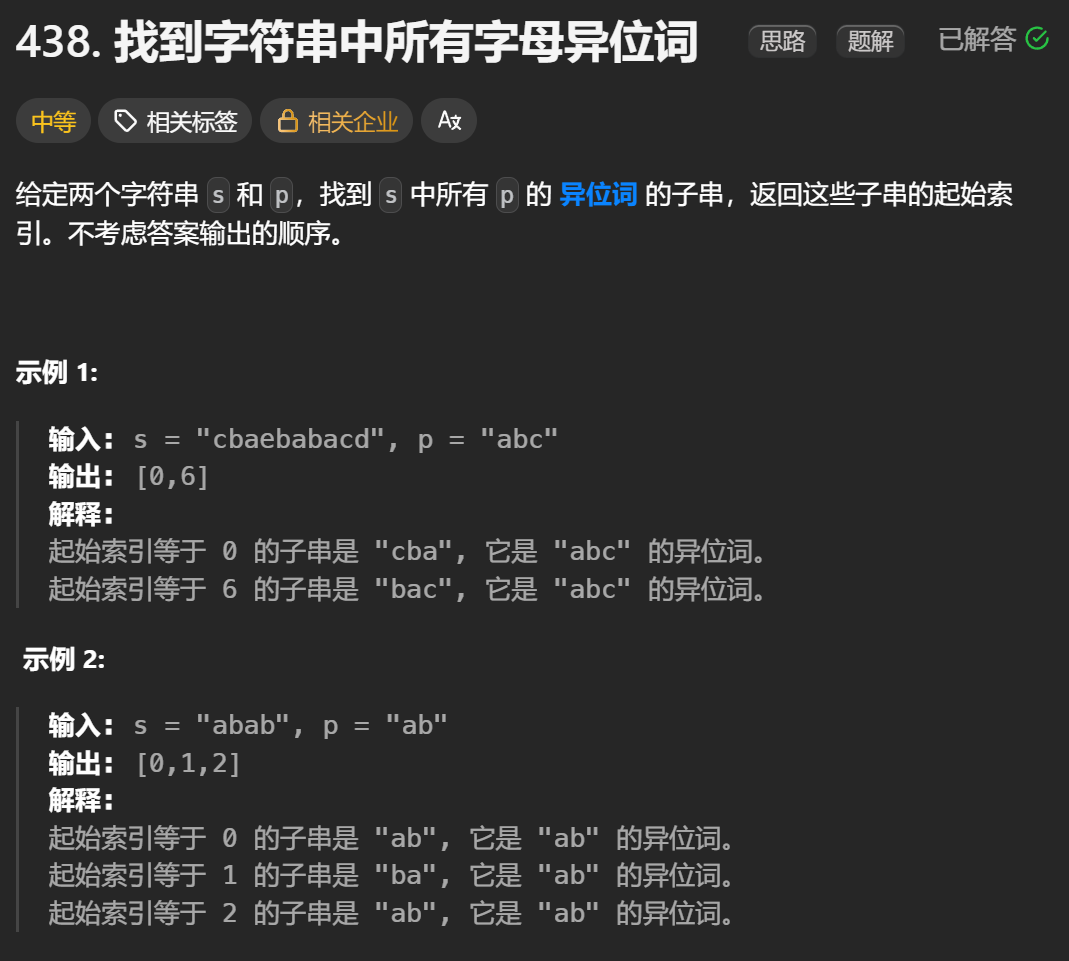
12.找到字符串中所有字母异位词
🧠 题目解析 题目描述: 给定两个字符串 s 和 p,找出 s 中所有 p 的字母异位词的起始索引。 返回的答案以数组形式表示。 字母异位词定义: 若两个字符串包含的字符种类和出现次数完全相同,顺序无所谓,则互为…...
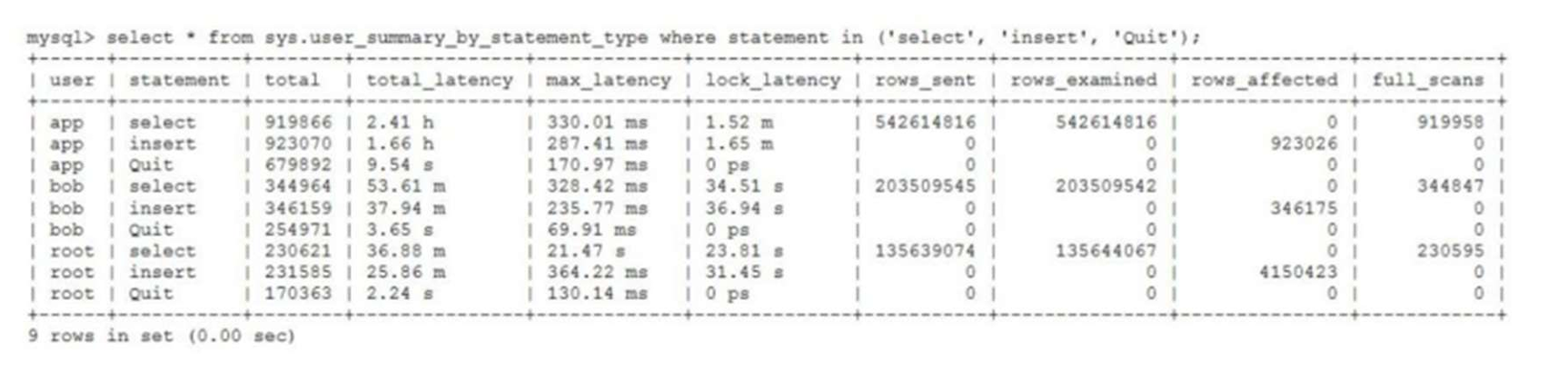
MySQL 8.0 OCP 英文题库解析(十三)
Oracle 为庆祝 MySQL 30 周年,截止到 2025.07.31 之前。所有人均可以免费考取原价245美元的MySQL OCP 认证。 从今天开始,将英文题库免费公布出来,并进行解析,帮助大家在一个月之内轻松通过OCP认证。 本期公布试题111~120 试题1…...
C++ 求圆面积的程序(Program to find area of a circle)
给定半径r,求圆的面积。圆的面积应精确到小数点后5位。 例子: 输入:r 5 输出:78.53982 解释:由于面积 PI * r * r 3.14159265358979323846 * 5 * 5 78.53982,因为我们只保留小数点后 5 位数字。 输…...

涂鸦T5AI手搓语音、emoji、otto机器人从入门到实战
“🤖手搓TuyaAI语音指令 😍秒变表情包大师,让萌系Otto机器人🔥玩出智能新花样!开整!” 🤖 Otto机器人 → 直接点明主体 手搓TuyaAI语音 → 强调 自主编程/自定义 语音控制(TuyaAI…...

C# SqlSugar:依赖注入与仓储模式实践
C# SqlSugar:依赖注入与仓储模式实践 在 C# 的应用开发中,数据库操作是必不可少的环节。为了让数据访问层更加简洁、高效且易于维护,许多开发者会选择成熟的 ORM(对象关系映射)框架,SqlSugar 就是其中备受…...
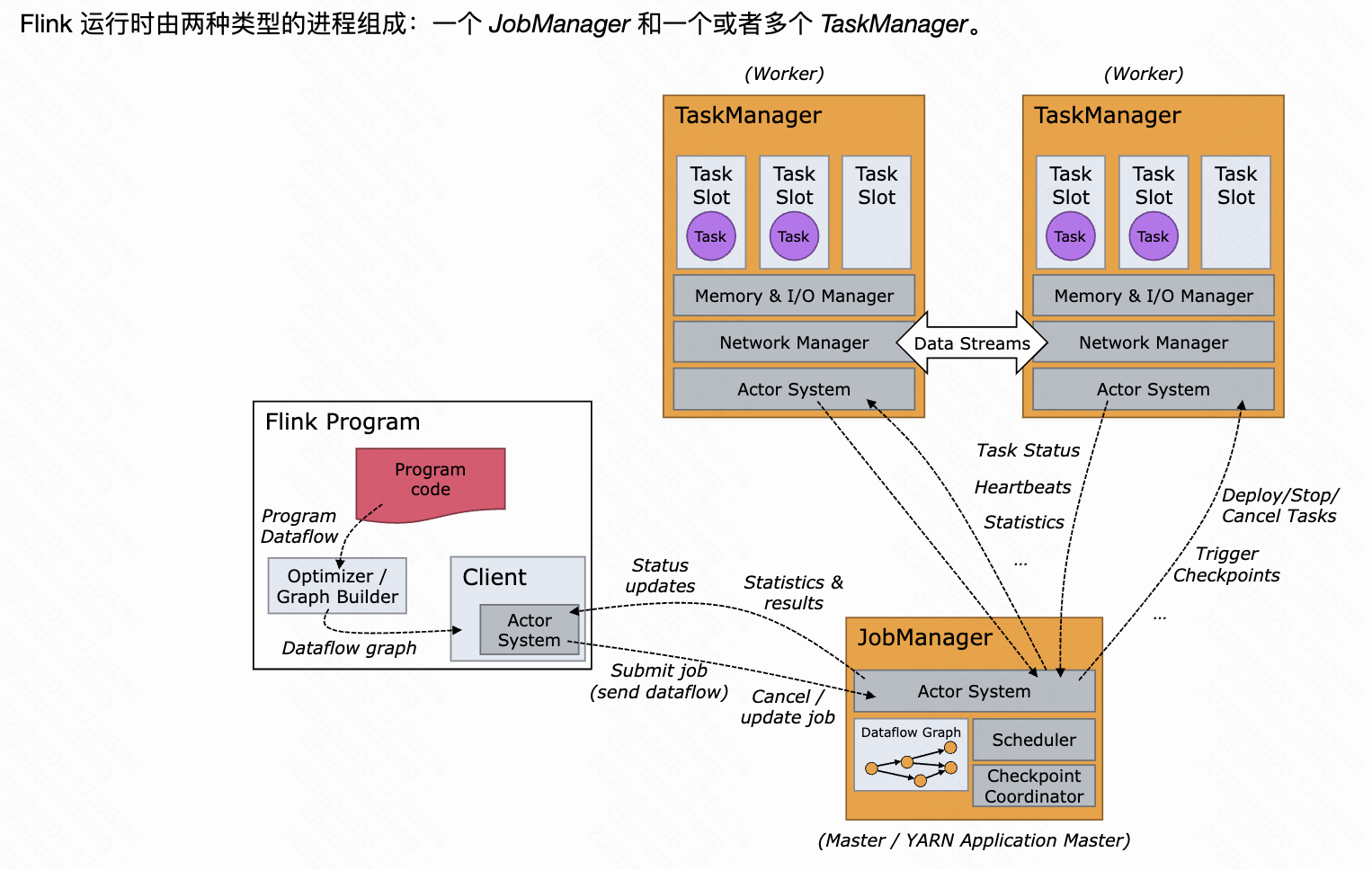
《基于Apache Flink的流处理》笔记
思维导图 1-3 章 4-7章 8-11 章 参考资料 源码: https://github.com/streaming-with-flink 博客 https://flink.apache.org/bloghttps://www.ververica.com/blog 聚会及会议 https://flink-forward.orghttps://www.meetup.com/topics/apache-flink https://n…...
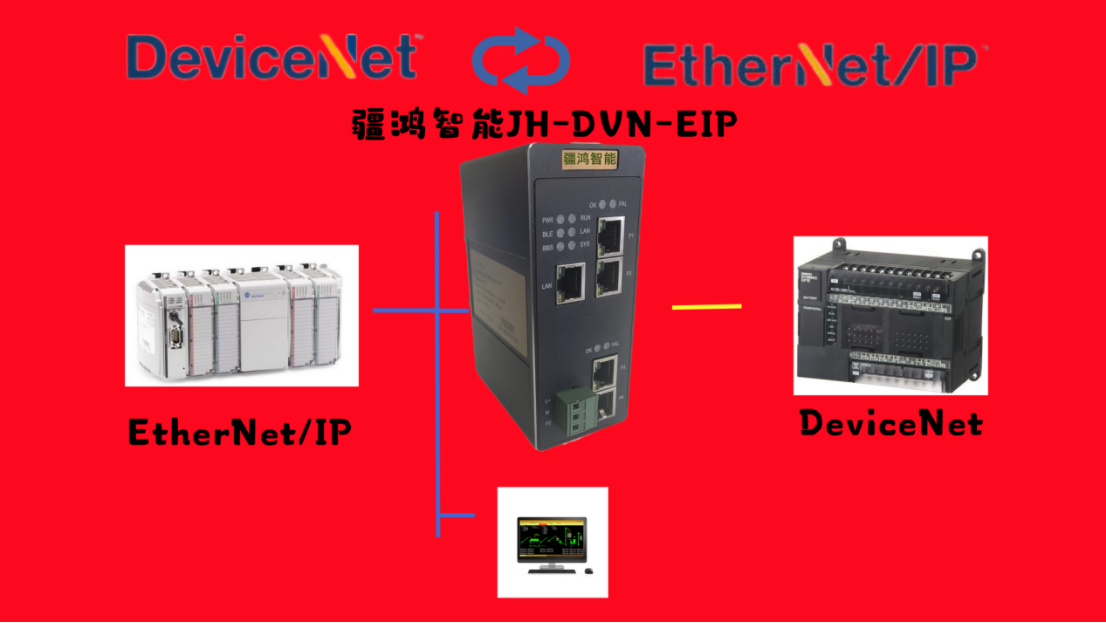
EtherNet/IP转DeviceNet协议网关详解
一,设备主要功能 疆鸿智能JH-DVN-EIP本产品是自主研发的一款EtherNet/IP从站功能的通讯网关。该产品主要功能是连接DeviceNet总线和EtherNet/IP网络,本网关连接到EtherNet/IP总线中做为从站使用,连接到DeviceNet总线中做为从站使用。 在自动…...

HTML前端开发:JavaScript 常用事件详解
作为前端开发的核心,JavaScript 事件是用户与网页交互的基础。以下是常见事件的详细说明和用法示例: 1. onclick - 点击事件 当元素被单击时触发(左键点击) button.onclick function() {alert("按钮被点击了!&…...

鱼香ros docker配置镜像报错:https://registry-1.docker.io/v2/
使用鱼香ros一件安装docker时的https://registry-1.docker.io/v2/问题 一键安装指令 wget http://fishros.com/install -O fishros && . fishros出现问题:docker pull 失败 网络不同,需要使用镜像源 按照如下步骤操作 sudo vi /etc/docker/dae…...

【python异步多线程】异步多线程爬虫代码示例
claude生成的python多线程、异步代码示例,模拟20个网页的爬取,每个网页假设要0.5-2秒完成。 代码 Python多线程爬虫教程 核心概念 多线程:允许程序同时执行多个任务,提高IO密集型任务(如网络请求)的效率…...
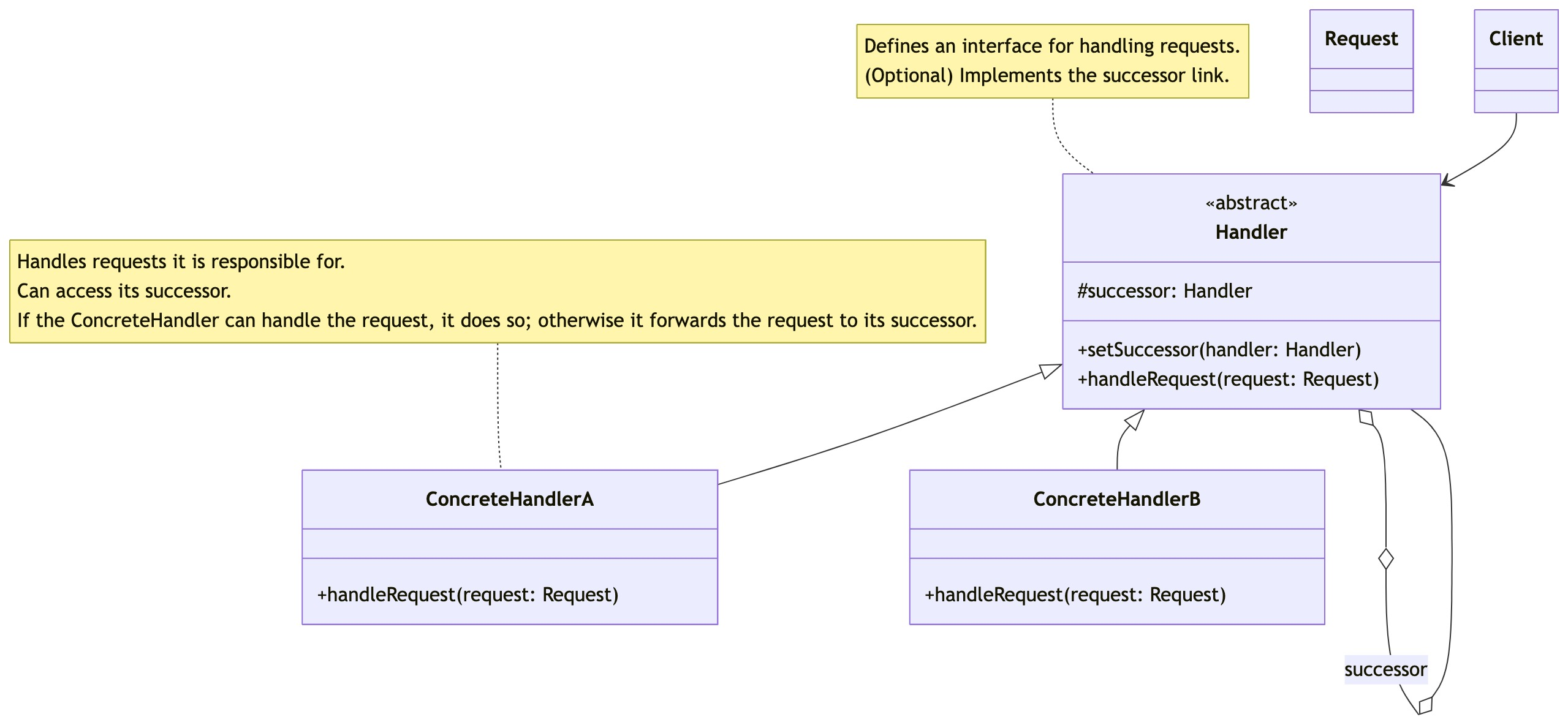
零基础设计模式——行为型模式 - 责任链模式
第四部分:行为型模式 - 责任链模式 (Chain of Responsibility Pattern) 欢迎来到行为型模式的学习!行为型模式关注对象之间的职责分配、算法封装和对象间的交互。我们将学习的第一个行为型模式是责任链模式。 核心思想:使多个对象都有机会处…...
)
【RockeMQ】第2节|RocketMQ快速实战以及核⼼概念详解(二)
升级Dledger高可用集群 一、主从架构的不足与Dledger的定位 主从架构缺陷 数据备份依赖Slave节点,但无自动故障转移能力,Master宕机后需人工切换,期间消息可能无法读取。Slave仅存储数据,无法主动升级为Master响应请求ÿ…...

NFT模式:数字资产确权与链游经济系统构建
NFT模式:数字资产确权与链游经济系统构建 ——从技术架构到可持续生态的范式革命 一、确权技术革新:构建可信数字资产基石 1. 区块链底层架构的进化 跨链互操作协议:基于LayerZero协议实现以太坊、Solana等公链资产互通,通过零知…...
前端开发面试题总结-JavaScript篇(一)
文章目录 JavaScript高频问答一、作用域与闭包1.什么是闭包(Closure)?闭包有什么应用场景和潜在问题?2.解释 JavaScript 的作用域链(Scope Chain) 二、原型与继承3.原型链是什么?如何实现继承&a…...

工业自动化时代的精准装配革新:迁移科技3D视觉系统如何重塑机器人定位装配
AI3D视觉的工业赋能者 迁移科技成立于2017年,作为行业领先的3D工业相机及视觉系统供应商,累计完成数亿元融资。其核心技术覆盖硬件设计、算法优化及软件集成,通过稳定、易用、高回报的AI3D视觉系统,为汽车、新能源、金属制造等行…...