Linuxcnc-ethercat从入门到放弃(1)、环境搭建
项目开源网站 LinuxCNC![]() https://www.linuxcnc.org/当前release版本2.8.4
https://www.linuxcnc.org/当前release版本2.8.4
Downloads (linuxcnc.org)![]() https://www.linuxcnc.org/downloads/可以直接下载安装好linuxcnc的实时debian系统,直接刻盘安装就可以了
https://www.linuxcnc.org/downloads/可以直接下载安装好linuxcnc的实时debian系统,直接刻盘安装就可以了

安装IgH主站,网上有很多教程可供参考
git clone https://gitlab.com/etherlab.org/ethercat.git
安装linuxcnc-ethercat
git clone https://github.com/sittner/linuxcnc-ethercat
-
cd linuxcnc-ethercat
-
sudo make configure
-
sudo make
-
sudo install
安装cia402,控制ethercat伺服需要用到
git clone https://github.com/dbraun1981/hal-cia402
cd hal-cia402
sudo compile --install cia402.comp
配置文件放在linuxcnc/configs/sim.axis下
sd710.ini
# This config file was created 2023-07-27 05:34:43.371981 by the update_ini script
# The original config files may be found in the /home/taotech/linuxcnc/configs/sim.axis/sd710.old.old directory[EMC]
# The version string for this INI file.
VERSION = 1.1
MACHINE = EtherCAT Machine
DEBUG = 1[DISPLAY]
DISPLAY = axis
EDITOR = gedit
POSITION_OFFSET = RELATIVE
POSITION_FEEDBACK = ACTUAL
MAX_FEED_OVERRIDE = 1.2
INTRO_GRAPHIC = linuxcnc.gif
INTRO_TIME = 0
INCREMENTS = 5mm 1mm .5mm .1mm .05mm .01mm .005mm[FILTER]
PROGRAM_EXTENSION = .png,.gif,.jpg Greyscale Depth Image
PROGRAM_EXTENSION = .py Python Script
png = image-to-gcode
gif = image-to-gcode
jpg = image-to-gcode
py = python[RS274NGC]PARAMETER_FILE = linuxcnc.var[EMCMOT]EMCMOT = motmod
COMM_TIMEOUT = 1.0
BASE_PERIOD = 0
SERVO_PERIOD = 1000000[TASK]
TASK = milltask
CYCLE_TIME = 0.005[HAL]
HALFILE = sd710.hal[HALUI][TRAJ]
AXES = 1
HOME = 0 0 0
COORDINATES = X
LINEAR_UNITS = mm
ANGULAR_UNITS = deg
DEFAULT_LINEAR_VELOCITY = 100
MAX_LINEAR_VELOCITY = 400[EMCIO]
EMCIO = io
CYCLE_TIME = 0.100
TOOL_TABLE = tool.tbl[KINS]
KINEMATICS = trivkins coordinates=X
#This is a best-guess at the number of joints, it should be checked
JOINTS = 1[AXIS_X]
MIN_LIMIT = -200
MAX_LIMIT = 500
MAX_VELOCITY = 375.0
MAX_ACCELERATION = 2000.0[JOINT_0]
TYPE = LINEAR
HOME = 0.0
MAX_VELOCITY = 375.0
MAX_ACCELERATION = 2000.0
STEPGEN_MAXACCEL = 0
SCALE = 1
FERROR = 1
MIN_FERROR = 2000
MIN_LIMIT = -200
MAX_LIMIT = 500
HOME_DELAY = 50
HOME_VEL = 1
HOME_OFFSET = 100.0
HOME_SEARCH_VEL = 0.0
HOME_LATCH_VEL = 0.0
HOME_USE_INDEX = NO
HOME_IGNORE_LIMITS = NO
HOME_SEQUENCE = 0sd710.hal
###########################################################
#
# CIA 402 example snippet Hal
#
######################################################################################################################
# Setup
###########################################################loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTSloadusr -W lcec_conf sd710.xml
loadrt lcec
loadrt cia402 count=1
loadrt pid names=s-pid,0-pid###########################################################
# Functions servo-thread
###########################################################addf lcec.read-all servo-thread
addf cia402.0.read-all servo-threadaddf motion-command-handler servo-thread
addf motion-controller servo-thread
addf s-pid.do-pid-calcs servo-thread
addf 0-pid.do-pid-calcs servo-threadaddf cia402.0.write-all servo-threadaddf lcec.write-all servo-thread#########################################
#nets
#########################################
net emc-enable => iocontrol.0.emc-enable-in
sets emc-enable 1#config#
# Joint 0
#
setp cia402.0.csp-mode 1
setp cia402.0.pos-scale 800#from servo(ethercat) to cia402
net 0-statusword lcec.0.0.cia-statusword => cia402.0.statusword
net 0-drv-act-pos lcec.0.0.actual-position => cia402.0.drv-actual-position#from motion to cianet 0-home-index <= joint.0.index-enable => cia402.0.home
net 0-enable <= joint.0.amp-enable-out => cia402.0.enable
net 0-amp-fault => joint.0.amp-fault-in <= cia402.0.drv-fault
net 0-pos-cmd <= joint.0.motor-pos-cmd => cia402.0.pos-cmd
net 0-pos-fb => joint.0.motor-pos-fb <= cia402.0.pos-fb
#net 0-home lcec.0.0.in-5 => joint.0.home-sw-in#from cia402 to servo(ethercat)
net 0-controlword cia402.0.controlword => lcec.0.0.cia-controlword
net 0-drv-target-pos cia402.0.drv-target-position => lcec.0.0.target-positionsd710.xml
masters>
<master idx="0" appTimePeriod="1000000" refClockSyncCycles="5">
<slave idx="0" type="generic" vid="00850104" pid="01030507" configPdos="true">
<syncManager idx="0" dir="out"/>
<syncManager idx="1" dir="in"/>
<syncManager idx="2" dir="out">
<pdo idx="1601">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="cia-controlword" halType="u32"/>
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="target-position" halType="s32"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1A01">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="cia-statusword" halType="u32"/>
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="actual-position" halType="s32"/>
</pdo>
</syncManager>
<dcConf assignActivate="300" sync0Cycle="*1" sync0Shift="250000"/>
</slave>
</master>
</masters>配置完成后可以启动linuxcnc软件,选择sd710启动
效果参考
linuxcnc-ethercat单轴_哔哩哔哩_bilibili![]() https://www.bilibili.com/video/BV1w94y1e7jc/?vd_source=235dd4c4dfb5d45fd9bed45715a82077#reply177527865760
https://www.bilibili.com/video/BV1w94y1e7jc/?vd_source=235dd4c4dfb5d45fd9bed45715a82077#reply177527865760
相关文章:
Linuxcnc-ethercat从入门到放弃(1)、环境搭建
项目开源网站 LinuxCNChttps://www.linuxcnc.org/当前release版本2.8.4 Downloads (linuxcnc.org)https://www.linuxcnc.org/downloads/可以直接下载安装好linuxcnc的实时debian系统,直接刻盘安装就可以了 安装IgH主站,网上有很多教程可供参考 git clo…...

14.Netty源码之模拟简单的HTTP服务器
highlight: arduino-light 简单的 HTTP 服务器 HTTP 服务器是我们平时最常用的工具之一。同传统 Web 容器 Tomcat、Jetty 一样,Netty 也可以方便地开发一个 HTTP 服务器。我从一个简单的 HTTP 服务器开始,通过程序示例为你展现 Netty 程序如何配置启动&a…...
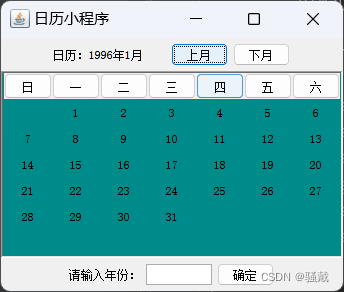
万年历【小游戏】(Java课设)
系统类型 Java实现的小游戏 使用范围 适合作为Java课设!!! 部署环境 jdk1.8Idea或eclipse 运行效果 更多Java课设系统源码地址:更多Java课设系统源码地址 更多Java小游戏运行效果展示:更多Java小游戏运行效果展…...
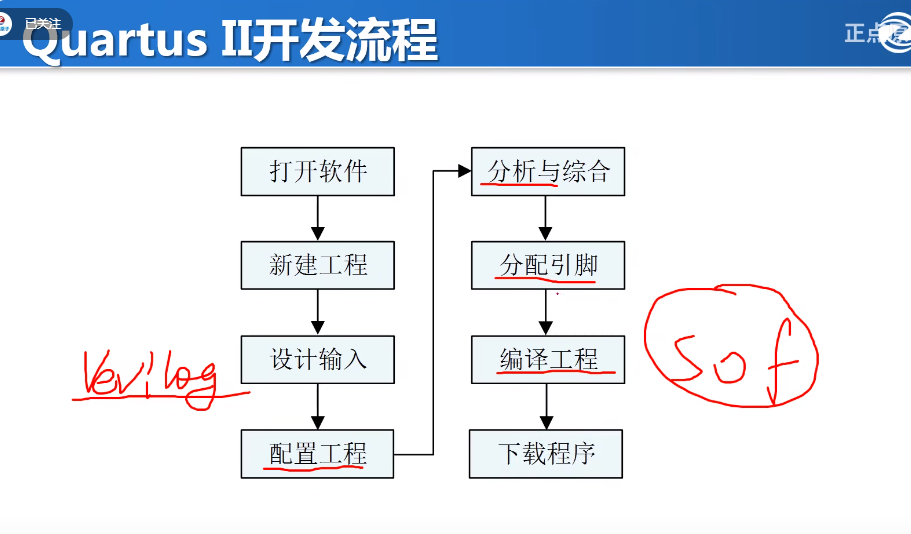
ad+硬件每日学习十个知识点(9)23.7.20
文章目录 1.正点原子fpga开拓者无gui检查项目2.排针连接器A2541WR-XP-2P3.肖特基二极管反接在LDO的输出端,是什么用?4.在AD中如何实现批量元器件的移动?5.在PCB中,如何让元器件以任意角度旋转?6.接口设计都要做静电防护…...

ipmitool 配置BMC的ip
要使用ipmitool配置BMC的IP地址,可以按照以下步骤进行操作: 确保已安装ipmitool工具。如果尚未安装,可以使用以下命令进行安装: |复制代码 sudo yum install ipmitool连接到BMC:使用IPMI-over-LAN(通过网…...
)
C++设计模式::小结(creation)
creation:隐藏创建逻辑. 1) 抽象工厂模式(Abstract Factory Pattern):多层次"任选"创建对象; 实现: 1) cShape:抽象对象; cShape*:具体对象; 2) cColor:抽象对象; cColor*:具体对象; 3) cFacto…...

运维工程师第一阶段windows的学习
文章目录 计算机硬件组成计算机历史计算机硬件组成最重要的三个硬件冯诺依曼体系:组装一台电脑:虚拟机和装系统虚拟机VMware安装系统搭建局域网本地安全策略用户本地安全策略共享文件删除操作系统操作系统分类系统优化常用命令系统的启动和密码破解winodws启动过程windows系统…...
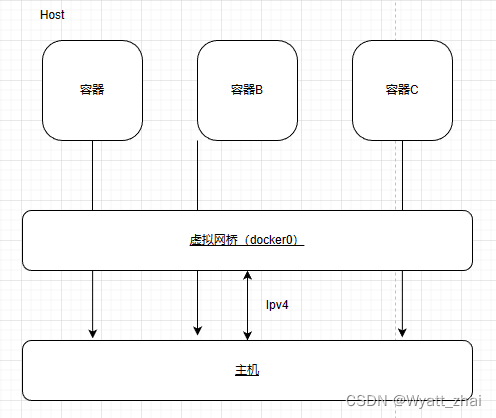
Docker复习
目录 1. Docker的理解1.1 Docker三要素 2 安装Docker2.1 安装命令2.2 配置阿里云加速器 3 Docker命令3.1 启动类命令3.2 镜像类命令 4 实战4.1 启动容器,自动创建实例4.2 查看Docker内启动的容器4.3 退出容器4.4 其他4.5 导入导出文件4.6 commit 5 Dockerfile5.1 理…...

华为OD机考--食堂供餐--带答案
题目描述: 某公司员工食堂以盒饭方式供餐。为将员工取餐排队时间降低为0,食堂的供餐速度必须要足够快。现在需要根据以往员工取餐的统计信息,计算出一个刚好能达成排队时间为0的最低供餐速度。即,食堂在每个单位时间内必须至少做出…...
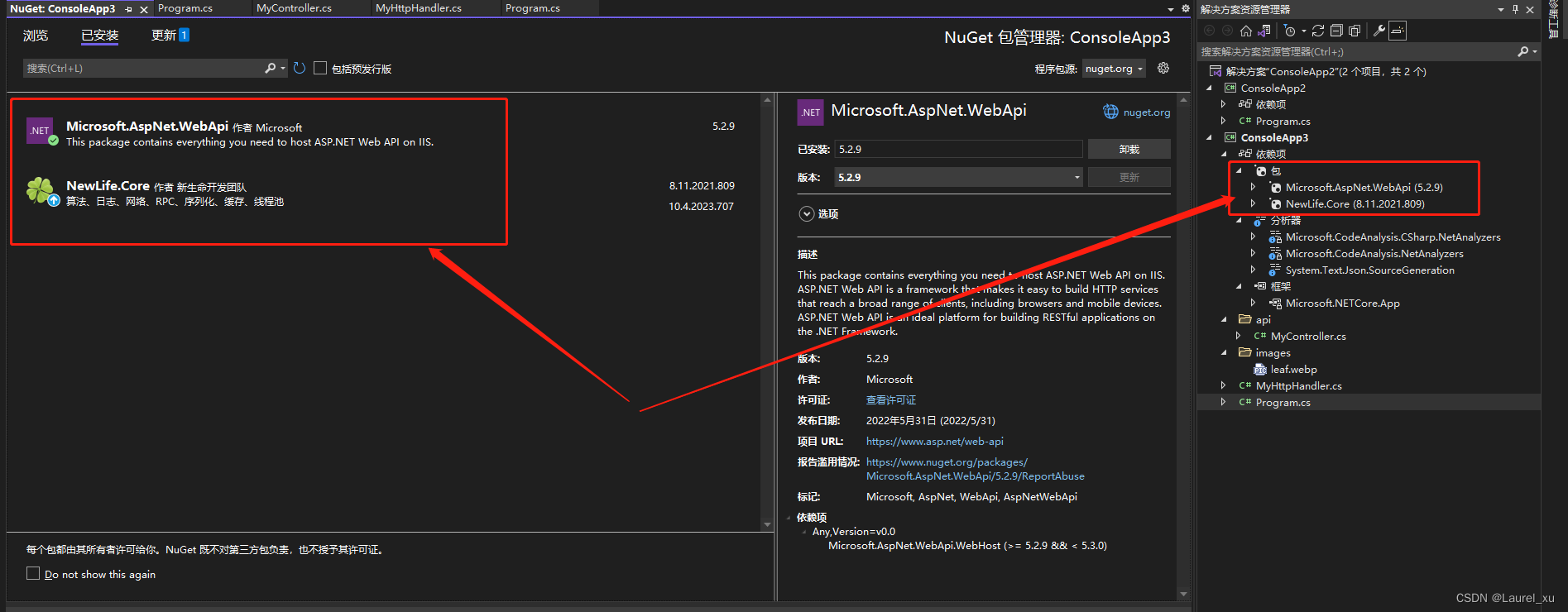
C# 关于使用newlife包将webapi接口寄宿于一个控制台程序、winform程序、wpf程序运行
C# 关于使用newlife包将webapi接口寄宿于一个控制台程序、winform程序、wpf程序运行 安装newlife包 Program的Main()函数源码 using ConsoleApp3; using NewLife.Log;var server new NewLife.Http.HttpServer {Port 8080,Log XTrace.Log,SessionLog XTrace.Log }; serv…...
初识TDMQ
目录 一:需求背景二:相关文档三:验证TDMQ广播消息 一:需求背景 目前公司需要将决策引擎处理的结果, 一部分数据交给下游分析/入黑/通知等功能。因此就需要决策引擎生产结果让多方下游去消费。 而我需要实现下游的一部…...

UEditor 百度富文本编辑器使用 遇到问题
小小吐槽 碰到前后不分离项目,富文本使用的UEdtior UEditor 点击上传图片转base64 在ueditor.all.js文件中找到这个 callback()函数 这里使用根据图片的url转成base64 UEditore 粘贴图片转base64 UEditor回显图片(base64) 把ueditor.all…...
 单机部署以及(400)报错)
jaeger+elasticsearch(cassandra ) 单机部署以及(400)报错
Jaeger 快速体验 官网下载地址 https://www.jaegertracing.io/download/ GitHub 下载地址 https://github.com/jaegertracing/jaeger/releases 下载二进制文件压缩包后,运行解压后的 all-in-one 文件即可。 jaeger-all-in-one 采用内存存储数据,专为…...
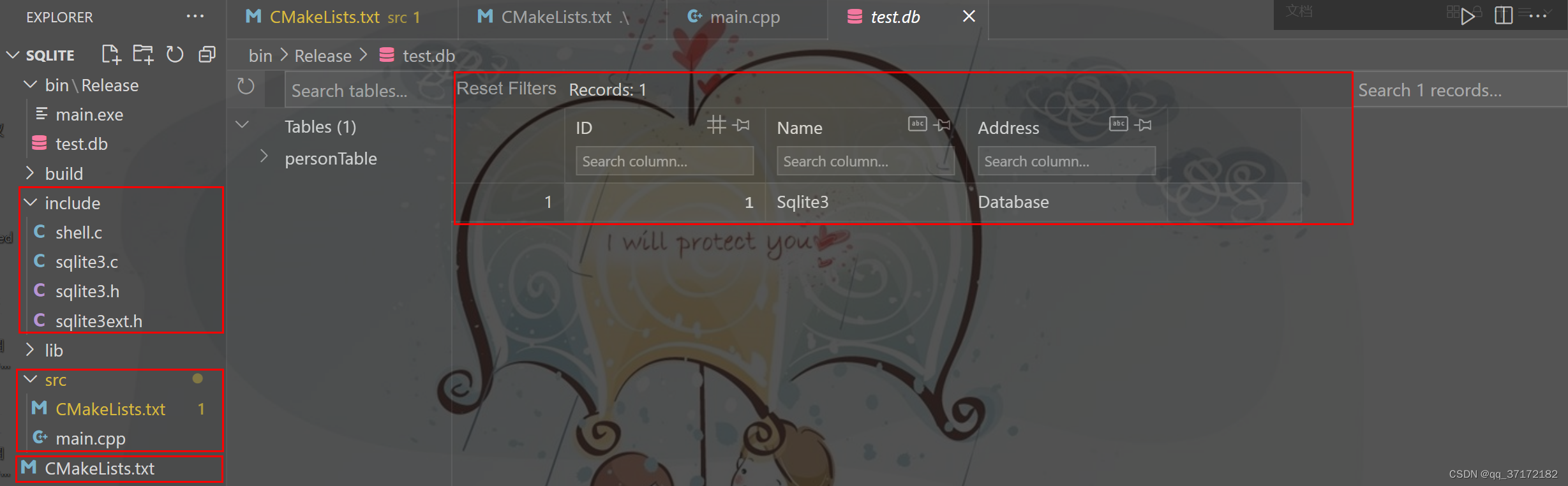
VSCode配置之C++ SQLite3极简配置方案
背景 最近在学习《深入应用C11: 代码优化与工程级应用》,其中第13章说到SQLite库,查询网上诸多教程,发现比较容易出现bug且配置较为麻烦,故记录此次简化版方案,以供参考。 软件环境 SQLite 3.42.0 版本(仅…...

P5725 【深基4.习8】求三角形
题目描述 模仿例题,打印出不同方向的正方形,然后打印三角形矩阵。中间有个空行。 输入格式 输入矩阵的规模,不超过 9 9 9。 输出格式 输出矩形和正方形 1.题目分析 循环判断就可以解决,总的来说,是个比较简单的…...

分布式消息中间件介绍
什么是分布式消息中间件? 对于分布式消息中间件,首先要了解两个基础的概念,即什么是分布式系统,什么又是中间件。 分布式系统 “A distributed system is one in which components located at networked computers communicate an…...

【Linux进程篇】冯诺依曼体系
【Linux进程篇】冯诺依曼体系 目录 【Linux进程篇】冯诺依曼体系冯诺依曼体系结构(1/3内容 )操作系统(Operator System)概念设计OS的目的定位如何理解“管理”总结系统调用和库函数的概念 作者:爱写代码的刚子 时间:2023.7.28 前言…...

陕西师范大学大学:融合传统与创新的学府之旅
前言 > 📕作者简介:热爱跑步的恒川,致力于C/C、Java、Python等多编程语言,热爱跑步,喜爱音乐的一位博主。 > 📗本文收录于恒川的日常汇报系列,大家有兴趣的可以看一看 > Ὅ…...

HTML <progress> 标签
实例 正在进行的下载: <progress value"22" max"100"></progress> 浏览器支持 元素ChromeIEFirefoxSafariOpera<progress>8.010.016.06.011.0 定义和用法 <progress> 标签标示任务的进度(进程…...

常用测试工具汇总
目录 1.Web页面检查器 2.客户端-代理抓包 3.自动化测试工具 3.1接口自动化测试 3.2webUI自动化测试 3.3客户端UI自动化测试 4.手机模拟器测试工具 5.阿里云测试工具 1.Web页面检查器 F12查看html页面,查看页面大小和加载时间 2.客户端-代理抓包 Charles&a…...

【与我学 ClaudeCode】协作篇 之 Worktree + Task Isolation :目录隔离的并行执行通道
作者:逆境不可逃 技术永无止境 希望我的内容可以帮助到你!!!! 大家吼 ! 我是 逆境不可逃 今天给大家带来文章《【与我学 ClaudeCode】协作篇 之 Worktree Task Isolation :目录隔离的并行执行通道》. Le…...

终极Node.js Mock工具:Mockery入门到精通实战教程
终极Node.js Mock工具:Mockery入门到精通实战教程 【免费下载链接】mockery Simplifying the use of mocks with Node.js 项目地址: https://gitcode.com/gh_mirrors/mock/mockery Mockery是Node.js生态中简化Mock使用的终极工具,它为开发者提供了…...

告别枯燥理论!用Unity脚本生命周期与预制体玩转一个“会变身的敌人”
用Unity打造会变身的敌人:脚本生命周期与预制体的实战应用在游戏开发中,敌人AI的行为设计往往是新手开发者最感兴趣也最容易感到困惑的部分。Unity的脚本生命周期和预制体系统为这类需求提供了强大支持,但教科书式的讲解常常让学习者陷入枯燥…...
)
Windows开机自动全屏打开指定网页?一个快捷方式参数就搞定(Chrome/Edge/Firefox教程)
Windows开机自动全屏展示网页的终极方案每次开机都要手动打开浏览器、输入网址、切换全屏模式?这种重复操作不仅浪费时间,还容易在重要演示时手忙脚乱。想象一下:电脑启动后自动全屏显示你的仪表盘、会议日程或是监控大屏,整个过程…...

ROS机器人仿真架构解析:基于wpr_simulation的移动操作机器人技术实现
ROS机器人仿真架构解析:基于wpr_simulation的移动操作机器人技术实现 【免费下载链接】wpr_simulation 项目地址: https://gitcode.com/gh_mirrors/wp/wpr_simulation 在机器人操作系统(ROS)开发领域,硬件依赖和测试成本一直是制约算法迭代效率的…...

从无人机到自动驾驶:一文读懂ROS中ENU、NED、相机坐标系到底怎么用
从无人机到自动驾驶:ROS中ENU、NED与相机坐标系实战指南 当你在无人机上安装Realsense相机时,是否遇到过相机数据与飞控数据"对不上"的情况?或者在自动驾驶项目中,GPS的北东地坐标如何与激光雷达的东北天坐标对齐&#…...

Python爬虫避坑手册:10年爬取经验总结,看完再也不会被封IP
做爬虫这么多年,我见过太多新手从入门到放弃,不是因为学不会Python,而是被各种反爬机制虐得怀疑人生。 我刚入行的时候,写的第一个爬虫是爬某电商网站的商品价格。当时觉得爬虫不就是发个请求,解析个HTML吗?结果代码刚跑了5分钟,IP就被封了。我当时还傻乎乎地重启路由器…...

MPC Video Renderer技术解析:DirectShow硬件加速渲染器的实现原理与深度剖析
MPC Video Renderer技术解析:DirectShow硬件加速渲染器的实现原理与深度剖析 【免费下载链接】VideoRenderer Внешний видео-рендерер 项目地址: https://gitcode.com/gh_mirrors/vi/VideoRenderer MPC Video Renderer是一款基于GPL v3协…...

荣耀出征离线挂机深度攻略:吃透隐性机制,告别无效挂机碾压同级
作为混迹游戏圈二十余年、从街机厅搓摇杆到网吧通宵刷端游,日均稳坐游戏6小时以上的老玩家,实测过无数网游的挂机体系。《荣耀出征》的离线挂机看似门槛极低、操作简单,但全网九成攻略都只停留在“开自动、挂地图”的基础层面,完全…...

5.18~5.24补题
牛客周赛Round 144 A.我是谁?牛客周赛Round 144 B.我是清楚姐姐牛客周赛Round 144 C.其实我是小苯 牛客周赛Round 144 D.骗你的,其实我是小红牛客周赛Round 144 E.好吧,我是BingbongSMU Spring 2026 Round 4 ASMU Spring 2026 Round 4 BSMU S…...