ROS1ROS2之CmakeList.txt和package.xml用法详解
前言:目前还在学习ROS+无人机框架中,,,
更多更新文章详见我的个人博客主页【前往】
文章目录
- 1. CMakeLists.txt与package.xml的作用
- 2. 生成CMakeLists.txt
- 2.1 ROS1
- 2.2 ROS2
- 3. CMakeLists.txt编写
- 3.1 ROS1
- 3.2 ROS2
- 4. package.xml编写
- 5. 其他--Setup.py的修改
1. CMakeLists.txt与package.xml的作用
在ROS系统的功能包中 要包含 CMakeLists.txt 与 package.xml 文件来编译功能包的内容
CMakeLists.txt原本是Cmake编译系统的规则文件,而Catkin编译系统基本沿用了CMake的编译风格,只是针对ROS工程添加了一些宏定义。所以在写法上,catkin 的 CMakeLists.txt与CMake的基本一致。用cmake命令创建功能包时,会自动生成CMakeList.txt文件,已配置了多数编译选项,且包含详细的注释,只需稍作修改便可编译自己的文件。
而package.xml文件是描述功能包清单的文件,包括功能包的名称、版本号、作者信息、许可信息、编译依赖和运行依赖等。
所以 CMakeLists.txt 非常重要,它指定了由源码到目标文件的规则,catkin编译系统在工作时首先会找到每个package下的 CMakeLists.txt ,然后按照规则来编译构建
2. 生成CMakeLists.txt
2.1 ROS1
ROS1可通过用catkin_create_pkg命令创建功能包,这会自动生成CMakeLists.txt和package.xml文件的。
# 创建工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src# 注:std msgs rospy roscpp为创建功能时指定的铱赖,test为包名
# 也可以先不指定,后面在CMakeLists.txt和package.xmL中手动添加
catkin_create_pkg test std_msgs rospy roscpp# 查看一下在~/catkin_ws/src目录下自动生成了哪些文件夹和文件
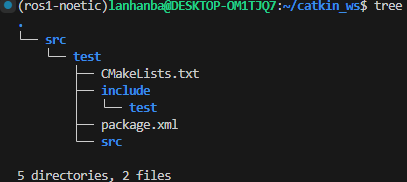
tree
通过上面的命令生成的工作空间如下
include:存放**.h**的头文件
src:可同时存放**.cpp或.py的源文件,但一般.py**文件存放在scripts目录中
scripts:习惯存放**.py的python**文件,需要自己创建注:python代码和c++代码不分家,可同时存放在同一功能包中
2.2 ROS2
ROS2可通过如下的命令来创建功能包以及必要的CMakeList.txt和package.xml文件
# 创建工作空间
mkdir -p ~/dev_ws/src
cd ~/dev_ws/src# ament_cmake和ament_python分别代表c++和python两种代码的功能包
# test_c和test_python代表包名
ros2 pkg create --build-type ament_cmake test_c
ros2 pkg create --build-type ament_python test_python# 查看一下在~/dev_ws/src目录下自动生成了哪些文件夹和文件
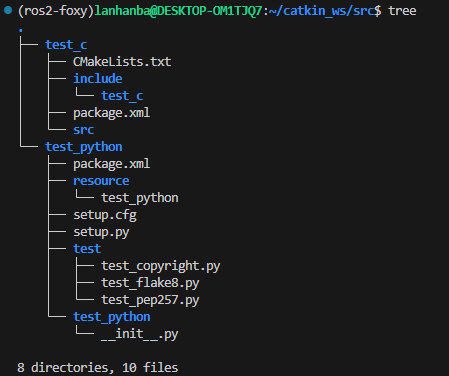
tree
通过以上命令生成的工作空间如下:
test_c/include:存放**.h**的头文件
test_c/src:存放**.cpp的C++**源文件
test_python/test_python:存放**.py的python**文件注:与ROS1不同,同一功能包内只能同时包含python文件或者C++文件中的一种
3. CMakeLists.txt编写
3.1 ROS1
- 常用的ROS1中CMakeLists.txt架构如下
视频解析参考:中科院软件所-机器人操作系统入门(ROS入门教程)
cmake_minimum_required() #CMake的最低版本号project() #项目名称find_package() #找到编译需要的其他CMake/Catkin package catkin_python_setup() #catkin新加宏,打开catkin的Python Module的支持add_message_files() #catkin新加宏,添加自定义Message文件 add_service_files() #catkin新加宏,添加自定义Service文件 add_action_files() #catkin新加宏,添加自定义Action文件 generate_message() #catkin新加宏,生成不同语言版本的msg/srv/action接口 catkin_package() #catkin新加宏,生成当前package的cmake配置,供依赖本包的其他软件包调用 add_library() #生成库 add_executable() #生成可执行二进制文件add_dependencies() #定义目标文件依赖于其他目标文件,确保其他目标已被构建 target_link_libraries() #链接catkin_add_gtest() #catkin新加宏,生成测试install() #生成可安装目标
需要自己配置的项目一般就下面几种:
-
include_directories
- 用于设置头文件的相对路径
- 全局路径默认为功能包所在目录,功能包的头文件一般放在功能包根目录下的include文件夹,
所以需要此处添加此文件夹 - 还包含catkin编译器默认的其他头文件路径,如:ROS默认安装路径、Linux系统路径等
-
add_exectuable
- 用于设置需要编译的代码和可执行文件
- 第一个参数为期望生成的可执行文件(节点)名称
- 后面的参数为参与编译的源文件(.cpp),若需要多个代码文件,可依次列出,空格分隔
-
target_link_libraries
- 用于设置链接库
- 有些功需要使用系统或第三方库函数,通过该选项可以配置执行文件链接的库文件
- 第一个参数与add_exectuable相同,为可执行文件(节点)名称
- 后面的参数为需要链接的库,依次列出,空格分隔
-
add_dependencies
- 用于设置依赖
- 有时候需要自定义消息类型,消息类型会在编译过程中产生相应语言的代码。若编译的可执行文
件依赖这些动态生成的代码,则需要添加${PROJECT NAME}generate messages_cpp配置
-
自定义数据类型:消息msg、服务srv、动作action
- find_package(catkin REQUIRE COMPONENTS message_generation)
- catkin_package(CATKIN_DEPENDS message_runtime)
- add_message_files(FILES xxx.msg)
- add_service_files(FILES xxx.srv)
- add_action_files(FILES xxx.action)
- generate_messages(DEPENDENCIES std_msgs)
CMakeLists.txt模板参考:CMakeLists.txt
更多教程参考:catkin/CMakeLists.txt - ROS Wiki
3.2 ROS2
常用的ROS2中CMakeLists.txt架构如下
cmake_minimum_required() #CMake的最低版本号project() #项目名称find_package() #查找系统中的依赖项ament_target_dependencies() #依赖于其他目标文件,确保其他目标已被构建 add_executable() #生成可执行二进制文件install() #生成可安装目标ament_package() #生成功能包rosidl_generate_interfaces() # 自定义消息类型接口
示例模板如下
cmake_minimum_required(VERSION 3.5)
project(test_c)# Default to C99
if(NOT CMAKE_C_STANDARD)set(CMAKE_C_STANDARD 99)
endif()# Default to C++14
if(NOT CMAKE_CXX_STANDARD)set(CMAKE_CXX_STANDARD 14)
endif()if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")add_compile_options(-Wall -Wextra -Wpedantic)
endif()# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
# uncomment the following section in order to fill in
# further dependencies manually.
# find_package(<dependency> REQUIRED)add_executable(talker src/publisher_member_function.cpp) # 修改2
ament_target_dependencies(talker rclcpp std_msgs) # 修改3install(TARGETStalker # 修改4DESTINATION lib/${PROJECT_NAME})if(BUILD_TESTING)find_package(ament_lint_auto REQUIRED)# the following line skips the linter which checks for copyrights# uncomment the line when a copyright and license is not present in all source files#set(ament_cmake_copyright_FOUND TRUE)# the following line skips cpplint (only works in a git repo)# uncomment the line when this package is not in a git repo#set(ament_cmake_cpplint_FOUND TRUE)ament_lint_auto_find_test_dependencies()
endif()# 添加自定义消息类型需要添加项
find_package(geometry_msgs REQUIRED)
find_package(rosidl_default_generators REQUIRED)rosidl_generate_interfaces(${PROJECT_NAME}"msg/Num.msg" # 自定义1"msg/Sphere.msg" # 自定义2"srv/AddThreeInts.srv" # 自定义3DEPENDENCIES geometry_msgs
)ament_package()
相较于基于catkin的CMake文件,基于ament的明显简洁很多
假设你编写了~/dev_ws/src/test.cpp文件后,需要修改的步骤如下:
- 链接源代码
add_executable(test src/test.cpp) # test为你输入节点后执行的名称,如ros2 run test_c test(前一个test_c为包名,后一个test则为这里的设置的名称,代表具体执行的代码)
ament_target_dependencies(test rclcpp) # 添加依赖项
- 添加下面这两行代码的目的是让编译器编译
~/dev_ws/src/test_c/test.cpp这个文件
install(TARGETStestDESTINATION lib/${PROJECT_NAME}
)
当你自定义消息类型时还需要消息类型文件
# 添加自定义消息类型需要添加项
# 下面两项是固定的,geometry_msgs是用于生成消息依赖包
find_package(geometry_msgs REQUIRED)
find_package(rosidl_default_generators REQUIRED)rosidl_generate_interfaces(${PROJECT_NAME}"msg/Num.msg" # 自定义1"msg/Sphere.msg" # 自定义2"srv/AddThreeInts.srv" # 自定义3DEPENDENCIES geometry_msgs
)
4. package.xml编写
package.xml的框架如下
<package format="3"><name>..</name><version>0.0.0</version><description>...</description><maintainer email="lanhanba@todo.todo">...</maintainer><license>...</license><buildtool_depend>...</buildtool_depend><exec_depend>...</exec_depend><exec_depend>...</exec_depend><export><build_type>...</build_type></export>
</package>
相较于CMakeList.txt,package.xml的语法就简单许多,且ROS1和ROS2的标签语法通用
- <build_depend></build_depend>: 标签定义了功能包中代码编译时所依赖的其他功能包
- <exec_depend><exec_depend>: 标签定义了功能包中可执行程序运行时所依赖的其他功能包
- 自定义数据类型:话题消息msg、服务数据srv、动作数据action
模板如下
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3"><name>test_c</name><version>0.0.0</version><description>TODO: Package description</description><maintainer email="lanhanba@todo.todo">lanhanba</maintainer><license>TODO: License declaration</license><!-- ROS1 --><buildtool_depend>catkin</buildtool_depend><build_depend>roscpp</build_depend><build_depend>rospy</build_depend><build_depend>std_msgs</build_depend><build_export_depend>roscpp</build_export_depend><build_export_depend>rospy</build_export_depend><build_export_depend>std_msgs</build_export_depend><exec_depend>roscpp</exec_depend><exec_depend>rospy</exec_depend><exec_depend>std_msgs</exec_depend><!-- ROS2_C++ --><buildtool_depend>ament_cmake</buildtool_depend><test_depend>ament_lint_auto</test_depend><test_depend>ament_lint_common</test_depend><export><build_type>ament_cmake</build_type></export><!-- ROS2_python --><test_depend>ament_copyright</test_depend><test_depend>ament_flake8</test_depend><test_depend>ament_pep257</test_depend><test_depend>python3-pytest</test_depend><export><build_type>ament_python</build_type></export><!-- ROS2中C++功能包添加自定义消息类型还需添加下面三行(固定形式,和上面的CMake修改搭配使用,python不需要) --><depend>rosidl_default_generators</depend><depend>geometry_msgs</depend><member_of_group>rosidl_interface_packages</member_of_group></package>
5. 其他–Setup.py的修改
在ROS2-Python功能包中,如果添加类似~/dev_ws/src/test_python/test.py的python文件,则需要对功能包中的Setup.py进行如下的修改
from setuptools import setuppackage_name = 'test_python'setup(name=package_name,version='0.0.0',packages=[package_name],data_files=[('share/ament_index/resource_index/packages',['resource/' + package_name]),('share/' + package_name, ['package.xml']),],install_requires=['setuptools'],zip_safe=True,maintainer='lanhanba',maintainer_email='lanhanba@todo.todo',description='TODO: Package description',license='TODO: License declaration',tests_require=['pytest'],entry_points={'console_scripts': [# 结构如下:节点名 = 功能包名.代码文件.执行入口函数名(一般执行入口函数名都是main,也就是说python代码中一般要有main函数)# 通过ros2 run test_python test 来执行test_python.test:main下的函数# 如果有多个python代码文件都需要一一添加,名称不能一样"test = test_python.test:main","test2 = test_python.test2:main"],},
)
参考:
catkin/CMakeLists.txt - ROS Wiki
CMakeLists.txt - ROS Humble Wiki
【ROS 学习笔记】CMakeLists.txt 与 package.xml - 知乎 (zhihu.com)
详细分析一个ROS2 CMakeLists.txt文件_首飞爱玩机器人的博客-CSDN博客
相关文章:
ROS1ROS2之CmakeList.txt和package.xml用法详解
前言:目前还在学习ROS无人机框架中,,, 更多更新文章详见我的个人博客主页【前往】 文章目录 1. CMakeLists.txt与package.xml的作用2. 生成CMakeLists.txt2.1 ROS12.2 ROS2 3. CMakeLists.txt编写3.1 ROS13.2 ROS2 4. package.xml…...

C#设计模式之---适配器模式
适配器模式(Adapter Pattern) 适配器模式(Adapter Pattern)也称包装样式或者包装(wrapper)。将一个类的接口转接成用户所期待的。适配器模式是一种结构型模式,一个适配使得因接口不兼容而不能在一起工作的类工作在一起…...

串口设备驱动
文章目录 一、串口简介二、Linux下串口驱动框架uart_driver 结构体uart_port 的添加与移除三、Linux下串口驱动工作流程四、Linux下串口应用开发终端工作模式多线程例程一、串口简介 串口全称叫做串行接口,通常也叫做 COM 接口,串行接口指的是数据一个一个的顺序传输,通信线…...
Nginx实现反向代理和负载均衡
Nginx安装 本文章主要介绍下,如何使用Nginx来实现反向代理和负载均衡,Nginx安装和基础知识,可参考我的这篇文章 Nginx安装。 Nginx实现反向代理 实现反向代理需要准备两台Nginx服务器。一台Nginx服务器A,ip为 192.168.206.140&…...
小米手机MIUI优化的影响
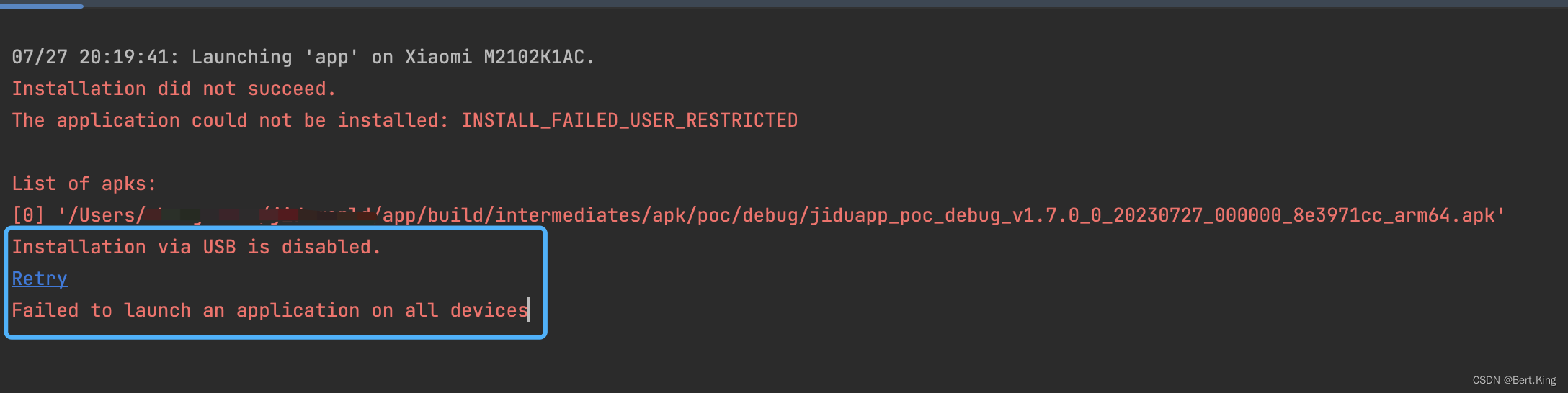
1. 小/红米手机的MIUI优化选项 2. MIUI优化选项的影响 2.1 MIUI优化会影响应用信息展示 MIUI优化选项会影响到应用信息的内容展示,具体如下图所示: 如果我们需要在应用信息里展示自启动入口,那我们就需要开启MIUI优化。 2.2 MIUI优化会影…...

【图论】kruskal算法
一.介绍 Kruskal(克鲁斯卡尔)算法是一种用于解决最小生成树问题的贪心算法。最小生成树是指在一个连通无向图中,选择一棵包含所有顶点且边权重之和最小的树。 下面是Kruskal算法的基本步骤: 将图中的所有边按照权重从小到大进行…...

Django框架:使用channels实现websocket,配置和项目实际使用
一、基本配置 依赖包: Django3.2 django-cors-headers3.5.0 redis4.6.0 #操作redis数据库的 channels3.0.0 #websocket channels-redis4.1.0 #通道层需要,依赖redis包项目目录结构: study_websocket --study_websocket --__init__.py --s…...

基于RK3588+FPGA+AI算法定制的智慧交通与智能安防解决方案
随着物联网、大数据、人工智能等技术的快速发展,边缘计算已成为当前信息技术领域的一个热门话题。在物联网领域,边缘计算被广泛应用于智慧交通、智能安防、工业等多个领域。因此,基于边缘计算技术的工业主板设计方案也受到越来越多人的关注。…...
)
AI面试官:LINQ和Lambda表达式(一)
AI面试官:LINQ和Lambda表达式(一) 当面试官面对C#中关于LINQ和Lambda表达式的面试题时,通常会涉及这两个主题的基本概念、用法、实际应用以及与其他相关技术的对比等。以下是一些可能的面试题目,附带简要解答和相关案…...

FPGA学习——FPGA利用状态机实现电子锁模拟
文章目录 一、本次实验简介二、源码及分析三、总结 一、本次实验简介 本次是实验是为了利用状态机模拟电子锁,相关要求如下: 顺序输入4位密码,密码为1234,用按键来键入密码用led灯指示键入第几位密码,(博…...
Bert经典变体学习
ALBert ALBERT就是为了解决模型参数量大以及训练时间过长的问题。ALBERT最小的参数只有十几M, 效果要比BERT低1-2个点,最大的xxlarge也就200多M。可以看到在模型参数量上减少的还是非常明显的,但是在速度上似乎没有那么明显。最大的问题就是这种方式其实…...
uniapp checkbox radio 样式修改
文章目录 通过查看代码,发现 before部分是设置样式的主要属性 我们要设置的话,就要设置checkbox::before的属性。 其中的content表示内容,比如内部的对勾 那么我们设置的时候,比如设置disabletrue的时候或者checkedtrue的时候&…...

电脑重启后VScode快捷方式失效,找不到Code.exe
问题描述 下班回家关了部分程序就直接关机了,回家后重启电脑发现vscode的快捷方式就失效了,提示Code.exe已被移动或删除。 解决方法 查看你的vscode安装目录,Microsoft VS Code目录下大概率会存在一个名为_的文件夹,然后会发现…...
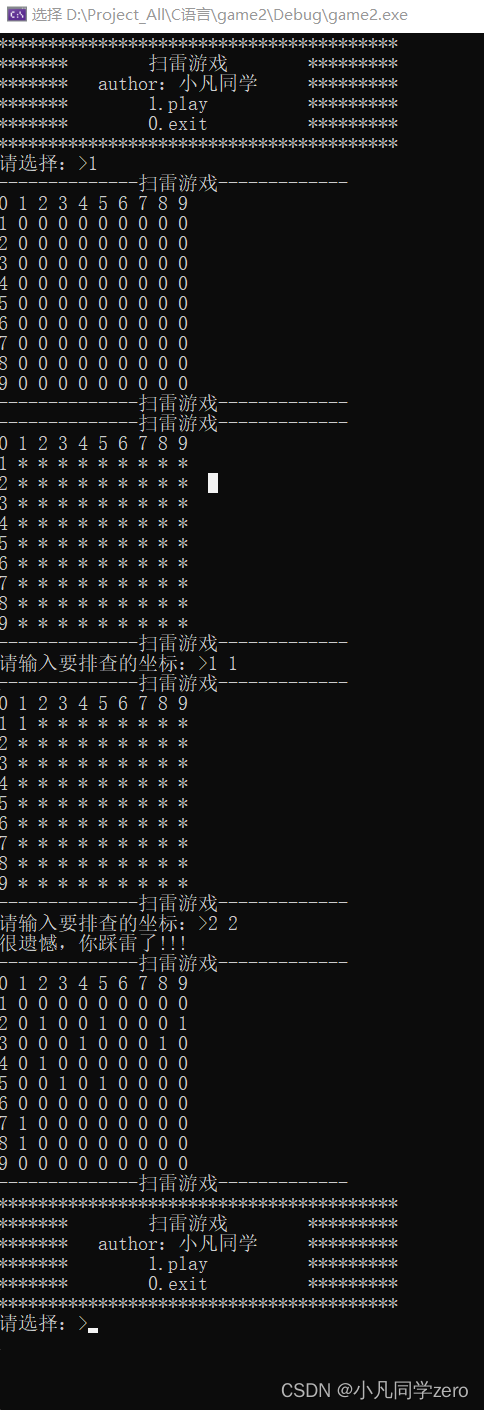
C语言实现扫雷游戏
test.c源文件 - 扫雷游戏测试 game.h头文件 - 扫雷游戏函数的声明 game.c源文件 - 扫雷游戏函数的实现 1.布置雷 -- 存放雷的雷盘 9*9 数组设计成11*11 上下左右方各多一行,保证周围8的范围 雷 - 1 不是雷 - 0 2.排查雷 主题测试源文件代码 &…...
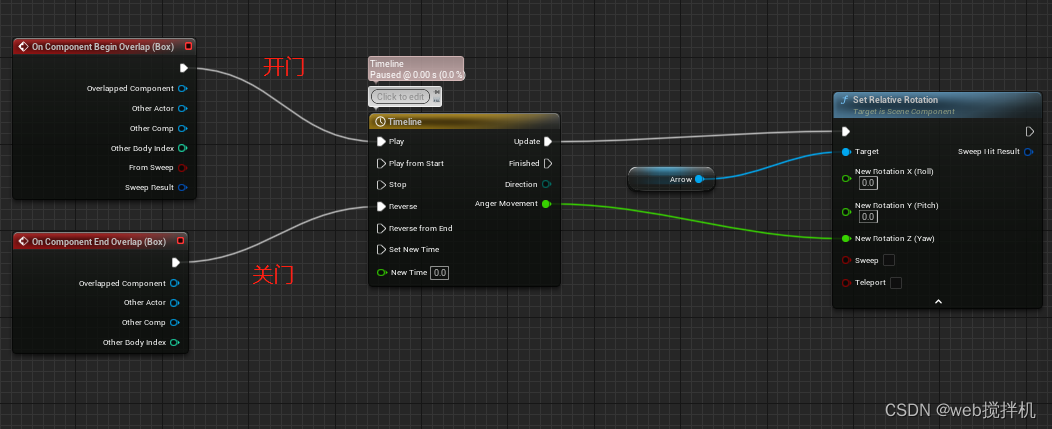
蓝图节点编辑器
打印字符串 第02章 蓝图结构 03 -注释和重新路由_哔哩哔哩_bilibili 第02章 蓝图结构 04 - 变量_哔哩哔哩_bilibili 第03章 蓝图简易门 01 - 箱子碰撞_哔哩哔哩_bilibili 第03章 蓝图简易门 02 - 静态Mesh和箭头_哔哩哔哩_bilibili 第03章 蓝图简易门 03 - 设置相对旋转节点_哔…...

MySql 知识大汇总
数据库索引 数据库索引是一种数据结构,用于提高数据库查询的速度和效率。索引可以看作是表中一列或多列的值的快速查找方式,类似于书籍的目录。通过创建索引,可以减少数据库的扫描量,加快数据的检索速度。 常见的索引类型 常见…...

深入浅出Pytorch函数——torch.sum
分类目录:《深入浅出Pytorch函数》总目录 相关文章: 深入浅出Pytorch函数——torch.Tensor 函数torch.sum有两种形式: torch.sum(input, *, dtypeNone):返回输入张量input所有元素的和。torch.sum(input, dim, keepdimFalse, *,…...
Git克隆文件不显示绿色勾、红色感叹号等图标
1、问题 Git和TorToiseGit安装后,Git克隆的文件不会显示绿色勾、红色感叹号等图标。 2、检查注册表 2.1、打开注册表 (1)WinR打开运行窗口,输入regedit,点击确定,打开注册表编辑器。 2.2、找如下路径 (1)找到路径 计算机\HKEY_…...

SOC FPGA之HPS模型设计(一)
目录 一、建立HPS硬件系统模型 1.1 GHRD 1.2 从0开始搭建HPS 1.2.1 FPGA Interfaces 1.2.1.1 General 1.2.1.2 AXI Bridge 1.2.1.3 FPGA-to-HPS SDRAM Interface 1.2.1.4 DMA Peripheral Request 1.2.1.5 Interrupts 1.2.1.6 EMAC ptp interface 1.2.2 Peripheral P…...

解决openstack重启swift服务后报错
swift重启报错 问题描述解决办法 问题描述 swift服务正常状态如下 [rootcontroller ~]# swift statAccount: AUTH_8bde12ff804e42498661b7454994c446Containers: 0Objects: 0Bytes: 0X-Put-Timestamp: 1690507907.67931X-Timestamp: 1690507907.67931X-Trans-Id: tx56d22fa13…...

Adobe-GenP 3.0:轻松激活Adobe全家桶的完整指南
Adobe-GenP 3.0:轻松激活Adobe全家桶的完整指南 【免费下载链接】Adobe-GenP Adobe CC 2019/2020/2021/2022/2023 GenP Universal Patch 3.0 项目地址: https://gitcode.com/gh_mirrors/ad/Adobe-GenP Adobe-GenP 3.0是一款专为Adobe Creative Cloud系列软件…...

AhMyth位置跟踪:GPS定位与地理围栏技术深度解析
AhMyth位置跟踪:GPS定位与地理围栏技术深度解析 【免费下载链接】AhMyth Cross-Platform Android Remote Administration Tool | The only maintained version of AhMyth on github | A revival of the original repository at https://GitHub.com/AhMyth/AhMyth-An…...
)
微信聊天图片丢了别慌!保姆级教程:找回并解密DAT文件(支持新旧版微信路径)
微信DAT图片恢复实战:从文件定位到批量解密的完整指南 微信聊天记录中的图片突然消失?别急着放弃!那些看似无法打开的DAT文件里,可能藏着您的重要回忆或工作资料。本文将带您深入微信存储机制,手把手完成从文件定位到…...

PrivacyGuard实战:基于实证差分隐私的机器学习模型隐私审计框架
1. 项目概述与核心价值在过去的几年里,我亲眼见证了机器学习模型从实验室走向银行、医疗、社交网络等各个敏感领域的全过程。模型性能的每一次飞跃都令人兴奋,但随之而来的隐私泄露事件也一次次为我们敲响警钟。一个在医疗数据上训练出的诊断模型&#x…...

AI算法工程师如何进行模型部署?这2个工具+3个技巧,快速上线
对于软件测试从业者来说,模型部署并不是一个陌生的概念——随着AI功能逐渐渗透到各类应用软件中,测试工程师不仅需要验证模型输出的准确性,更需要理解部署流程对模型稳定性、响应速度和结果一致性的影响。很多测试同学会有这样的困惑…...

使用libusb-win32驱动复活老旧USB硬件:以Elektor Magic Eye为例
1. 项目概述:让老硬件在新时代焕发新生手头有一台十多年前的《Elektor》杂志上刊登的“Magic Eye EM84”复古VFD显示屏项目,想把它接到Windows 10电脑上当个酷炫的CPU占用率显示器,却发现官方提供的“AVR309”USB驱动在新系统上彻底罢工了。这…...

结肠“瑞士卷”制片法
在肠道病理研究中,如何完整保留小鼠结肠的全层结构、同时避免人为损伤,一直是实验操作的难点。本文分享一套改良版“瑞士卷”制片技术,无需剖开肠管、无需机械顶压,即可获得高质量的全结肠切片,特别适合炎症、隐窝异常…...

自动加字幕软件推荐:口播视频如何批量加字幕过
口播视频加字幕,为什么越做越累?一位知识类博主连续两周日更3条口播视频,每条12–18分钟,需手动校对字幕、拆分金句切片、补气口停顿、匹配背景音乐——最后一条视频发布时,字幕错漏率达17%,平台审核未过。…...

从配置到运行时:Forge Admin 的动态 API 配置管理是怎么做的
问题:同一个接口,今天要加认证、明天要加加密、后天要限流,这些行为散落在拦截器、过滤器、注解里,改一次牵一发动全身,怎么集中管理和动态刷新? 1. 这个问题在企业后台里为什么常见 在企业后台开发中&am…...

清华大学学位论文LaTeX模板:30分钟快速排版终极指南
清华大学学位论文LaTeX模板:30分钟快速排版终极指南 【免费下载链接】thuthesis LaTeX Thesis Template for Tsinghua University 项目地址: https://gitcode.com/gh_mirrors/th/thuthesis 还在为论文格式烦恼吗?清华大学官方LaTeX模板thuthesis让…...