CTF学习路线指南(附刷题练习网址)
前言:
PWN,Reverse:偏重对汇编,逆向的理解;
Gypto:偏重对数学,算法的深入学习;
Web:偏重对技巧沉淀,快速搜索能力的挑战;
Mic:则更为复杂,所有与计算机安全挑战有关的都算在其中

常规做法;
A方向:PWN+Reverse+Gypto,随机搭配;
B方向:Web+Misc组合;
都要学的内容:
Linux基础、计算机组成原理,操作系统原理,网络协议分析;
A方向:
IDA工具使用(f5插件),逆向工程,密码学,缓冲区溢出等
书籍推荐:
《RE for Beginners(逆向工程入门)》;
《IDA Pro权威指南》;
《揭秘家庭路由器0day漏洞挖掘技术》;
《自己动手写操作系统》;
《黑客攻防宝典,系统实战篇》;
B方向:
网络安全,内网渗透,数据库安全。
书籍推荐:
《Web应用安全权威指南》
《web前端黑客技术揭秘》
《黑客秘籍-渗透测试实用指南》
《黑客攻防技术宝典Web实战篇》
《代码审计:企业级Web代码安全架构》
从基础题目出发(推荐资源):
Idf实验室:题目非常基础:ctf.idf.cn
有线下决赛题目复现:www.ichunqiu.com
xctf题库网站:oj.xctf.org.cn/
challs非常入门的国外ctf题库:www.wechall.net/ 很多国内选手都是从这里刷题成长起来
非常入门的国外cif题库:canyouhackit.it
(A方向):
很炫酷游戏化:https://microcorruption.com
比较简洁的内容,ssh连入即可玩:smashthestack.org
比较老牌的Wargame:
overthewire.org
exploit-exercise.com
PWN类题目的游乐场:pwnable.kr
(B方向)
米安的Web漏洞靶场:ctf.moonsos.com/pentest/index.php
国外的XSS测试:prompt.ml/0
国外的sql注入的挑战网站:redtiger.labs.overthewire.org
选择什么工具:
CTF比赛一般都是使用网络完全常用工具,比如burp、IDA等,但是会与很多大家不常见的工具。
这里我列举一些聚合:
https://hithub.com/truongkma/ctf-tools
https://hithub.com/Plkachu/v0lt
https://hithub.com/zardus/ctf-tools
https://hithub.com/TUCTF/Tools
以练促赛:
选择一场已经存在writeup的比赛。
以赛养练:
参加一场最新CTF比赛。
https://ctftime.org/国际比赛
http://www.xctf.org.cn/或内比赛

需要上图ctf电子书籍关注自动获取
名次不重要,过程很重要!
相关文章:
CTF学习路线指南(附刷题练习网址)
前言: PWN,Reverse:偏重对汇编,逆向的理解; Gypto:偏重对数学,算法的深入学习; Web:偏重对技巧沉淀,快速搜索能力的挑战; Mic:则更为复杂&…...

【Rust 基础篇】Rust默认泛型参数:简化泛型使用
导言 Rust是一种以安全性和高效性著称的系统级编程语言,其设计哲学是在不损失性能的前提下,保障代码的内存安全和线程安全。在Rust中,泛型是一种非常重要的特性,它允许我们编写一种可以在多种数据类型上进行抽象的代码。然而&…...

从源码分析Handler面试问题
Handler 老生常谈的问题了,非常建议看一下Handler 的源码。刚入行的时候,大佬们就说 阅读源码 是进步很快的方式。 Handler的基本原理 Handler 的 重要组成部分 Message 消息MessageQueue 消息队列Lopper 负责处理MessageQueue中的消息 消息是如何添加…...

shell编程 变量作用域
变量 变量赋值不用$,访问值时用$,赋值时两边不留空格,双引号括起来的变量被值替换{}标记变量开始和结束,变量名区分大小写,所有bash变量的值变量不区分类型,统一为字符串 变量类型 环境变量,子进程可以继承父进程环境…...
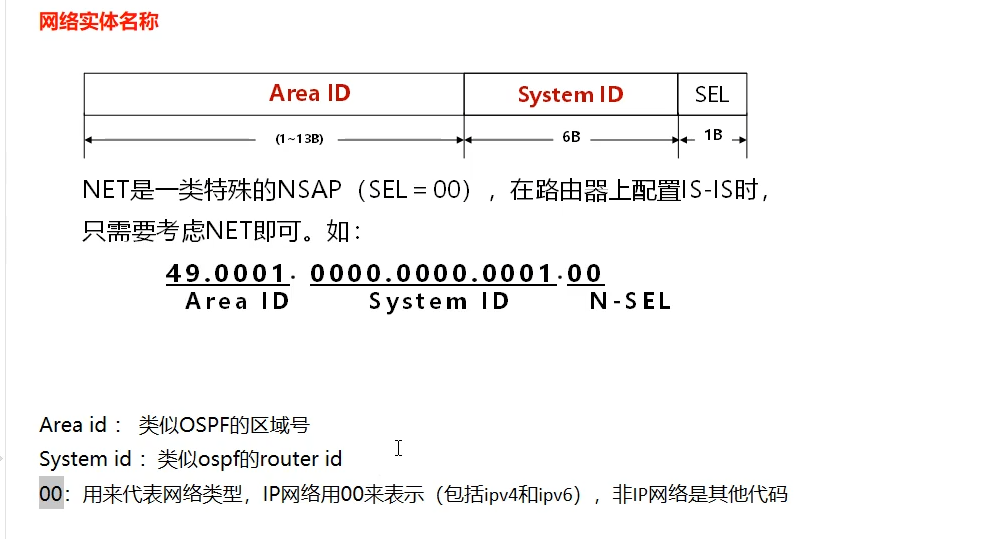
华为eNSP:isis的配置
一、拓扑图 二、路由器的配置 配置接口IP AR1: <Huawei>system-view [Huawei]int g0/0/0 [Huawei-GigabitEthernet0/0/0]ip add 1.1.1.1 24 [Huawei-GigabitEthernet0/0/0]qu AR2: <Huawei>system-view [Huawei]int g0/0/0 [Huawei-GigabitEthe…...

FS.05-SAS-UP-Methodology
FS.05-SAS-UP-Methodology-v9.2.pdf 附录 D 数据处理审核 作为现场数据处理系统和支持流程审核的一部分,受审核方最好在审核日期之前准备一些 SAS 特定的测试数据文件。 本文件提供了建议的方法; 受审核方和审核团队将就每次审核的具体方法达成一致。 …...
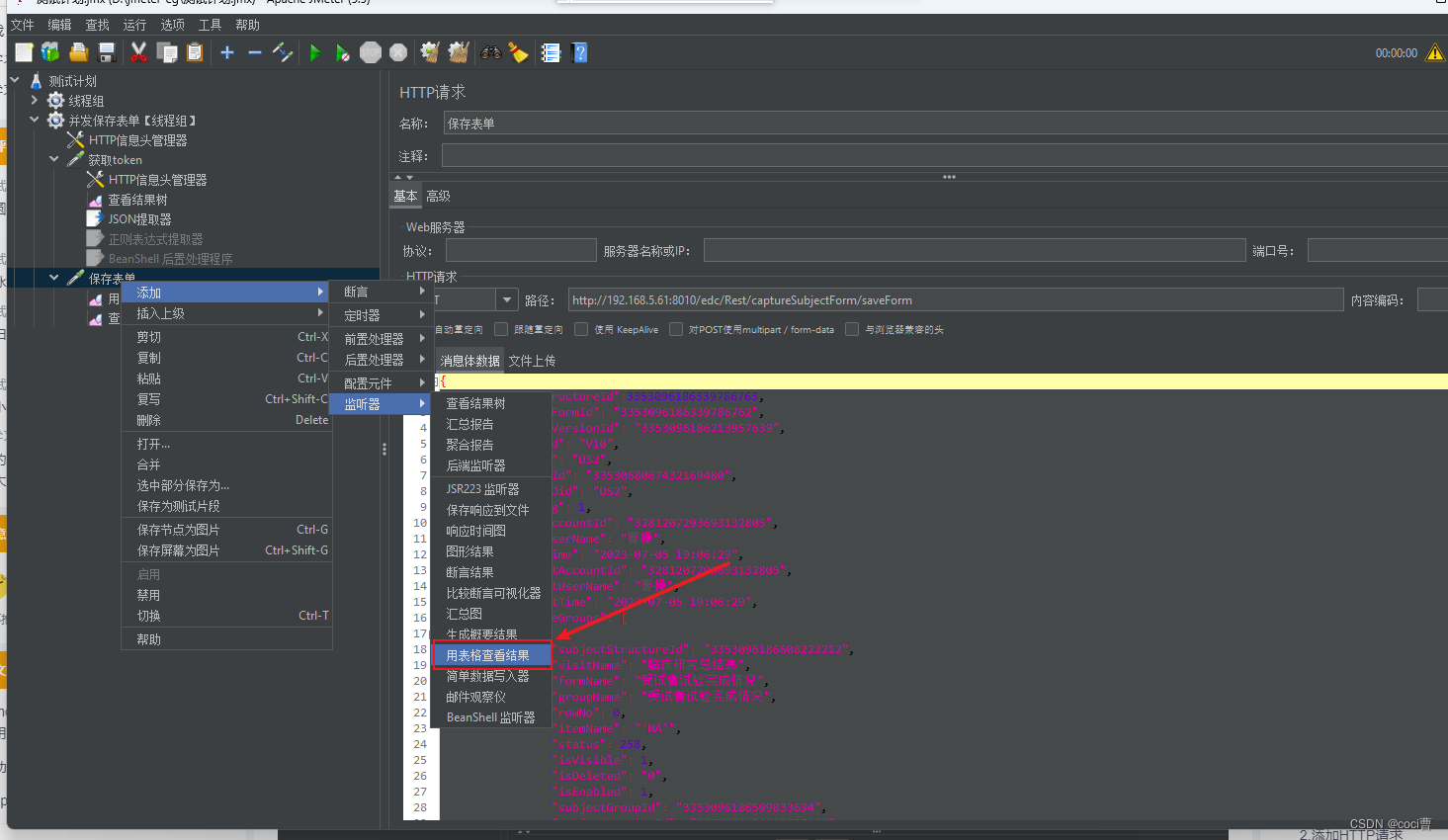
Jmeter并发测试
基本步骤 1、新建线程组 测试计划右键——>添加——>线程(用户)——>线程组 2、 添加HTTP请求 线程组右键——>添加——>取样器——>HTTP请求 3、 添加HTTP信息头管理器 线程组右键——>添加——>配置元件——>HTTP信息头…...

【JVM】浅看JVM的运行流程和垃圾回收
1.JVM是什么 JVM( Java Virtual Machine)就是Java虚拟机。 Java的程序都运行在JVM中。 2.JVM的运行流程 JVM的执行流程: 程序在执行之前先要把java代码转换成字节码(class文件),JVM 首先需要把字节码通过…...

使用低代码开发,需要注意哪些?
低代码平台的历史相对较短,大约始于 2000 年初,源于快速应用程序开发工具。随着低代码平台和工具的日益普及和优势,它不断发展以满足各种领域和角色的需求。 本文将研究各种低代码和无代码应用程序开发方法、业务用例、挑战和未来预测等。 一…...
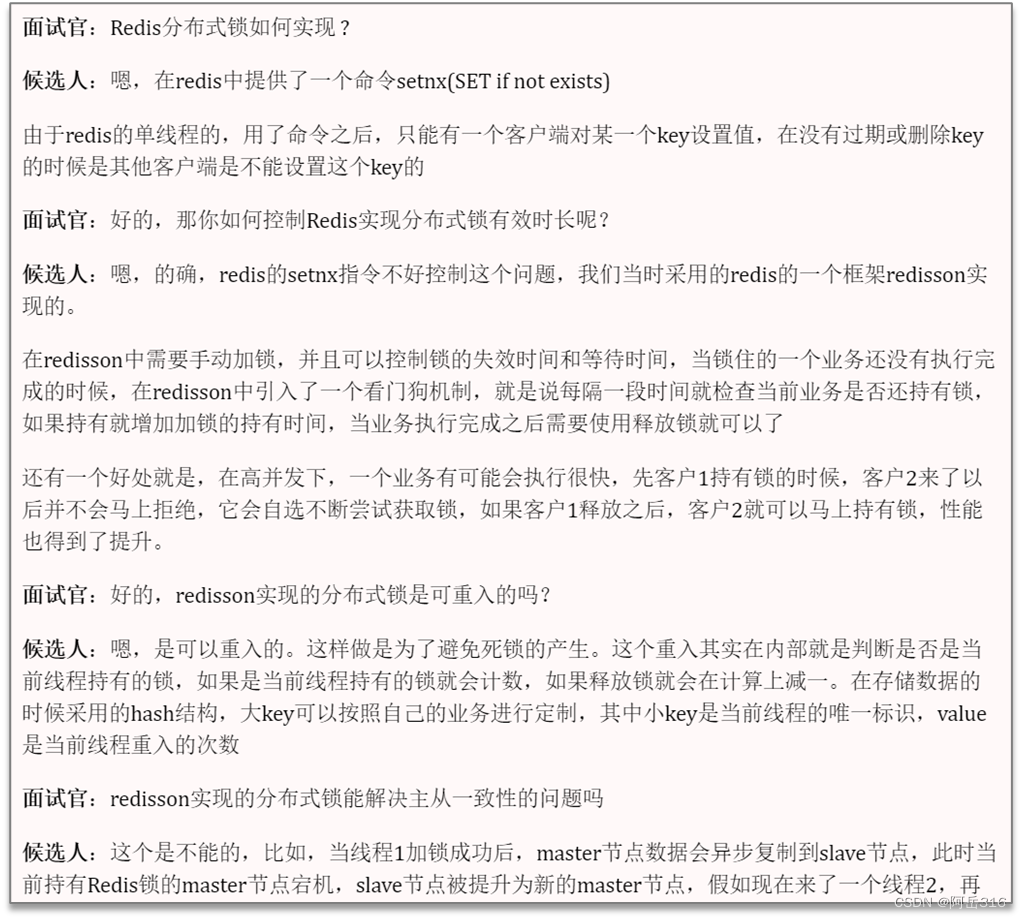
面试总结-Redis篇章(八)——Redis分布式锁
JAVA 面试总结-Redis分布式锁 模拟抢券场景通过下面方法添加Synchronized锁来防止上述情况,如果上面是单体服务没有问题,但是如果项目是集群部署,会出现下面的问题,因为Synchronized是属于本地的锁端口8080和8081同时访问…...

压力测试-商场项目
1.压力测试 压力测试是给软件不断加压,强制其在极限的情况下运行,观察它可以运行到何种程度,从而发现性能缺陷,是通过搭建与实际环境相似的测试环境,通过测试程序在同一时间内或某一段时间内,向系统发送预…...
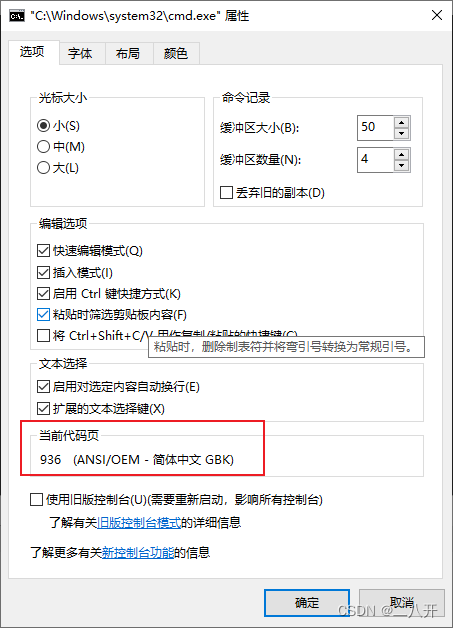
IDEA中文UT方法执行报错问题、wps默认保存格式
wps默认保存格式、IDEA中文UT方法执行报错问题 背景 1、wps修改文件后,编码格式从UTF-8-bom变成UTF-8(notepad可以查看); 2、IDEA中文UT执行报错: 解决方案 1、语言设置中不要勾选 “Beta版。。。。” 2、cmd中执…...
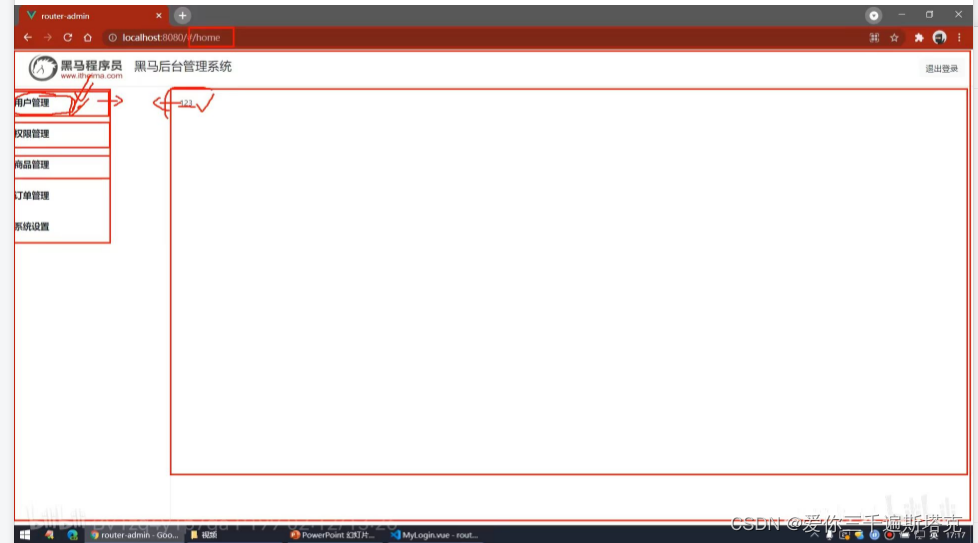
Vue如何实现编程式导航声明方法,前进和后退导航
编程式导航声明方法,前进和后退导航 在router中设置路由导航跳转函数 只要发生跳转 导航的声明函数 访问控制系统如何形成 就这三种 导航守卫的案例,写一个Main.Vue 和login .Vue 后台主页 如果想要展示后台主页,就用这种方法 想实现路由跳转…...

torch.load 报错 ModuleNotFoundError 或 AttributeError
Python 3.11.3 (main, Apr 7 2023, 19:25:52) [Clang 14.0.0 (clang-1400.0.29.202)] on darwin Type "help", "copyright", "credits" or "license" for more information.正常情况下,我们会使用 torch.save 保存模型的 …...
前端,js , Error in created hook: TypeError ,有bug了
怎么兄弟,遇到bug了???你开心吗,哈哈哈哈...

百度文心千帆大模型平台:企业级大模型服务的新航标
随着人工智能和大数据的快速发展,大模型平台正越来越受到各大企业和个人开发者的青睐。本文将以百度最新推出的文心千帆大模型平台为例,深入分析其在国家战略布局,经济发展趋势,市场变化动向和技术研发周期等方面的影响和应用。同…...

uniApp低功耗蓝牙一键开门、多对多查找、数组匹配数组、开锁
文章目录 htmlJavaScript坑 html <view class"m_t_36"><view class"w_50_ h_100 lh_100 m_l_a m_r_a bc_409eff radius_10 color_fff ta_c" click"openBluetoothAdapter()">一键开门</view> </view>JavaScript export…...
类和对象|六个默认成员函数|const成员函数|运算符重载
文章目录 默认成员构造函数1. 构造函数1.1 概念1.2 特性 2. 析构函数2.1 概念2.2 特性 3. 拷贝构造函数3.1 概念3.2 特性 4. 运算符重载4.1 赋值重载4.2 自增自减重载4.3 取地址操作符重载 5. const成员函数6. 取地址重载 默认成员构造函数 上一节我们说过,空类的大…...

从源码角度去深入分析关于Spring的异常处理ExceptionHandler的实现原理
ExceptionHandler的作用 ExceptionHandler是Spring框架提供的一个注解,用于处理应用程序中的异常。当应用程序中发生异常时,ExceptionHandler将优先地拦截异常并处理它,然后将处理结果返回到前端。该注解可用于类级别和方法级别,…...

04mysql查询语句之查询与分页02
1. 所有有门派的人员信息 ( A、B两表共有) INSERT INTO t_dept(deptName,address) VALUES(华山,华山); INSERT INTO t_dept(deptName,address) VALUES(丐帮,洛阳); INSERT INTO t_dept(deptName,address) VALUES(峨眉,峨眉山); INSERT INTO t_dept(deptN…...

3分钟搞定:终极免费DeepL Chrome翻译插件安装指南
3分钟搞定:终极免费DeepL Chrome翻译插件安装指南 【免费下载链接】deepl-chrome-extension A DeepL Translator Chrome extension 项目地址: https://gitcode.com/gh_mirrors/de/deepl-chrome-extension 还在为浏览外文网页而烦恼吗?想要获得专业…...

如何永久保存微信聊天记录?这款开源工具帮你一键导出并生成年度报告!
如何永久保存微信聊天记录?这款开源工具帮你一键导出并生成年度报告! 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com…...

OpenSSH协议层隐藏版本号实战指南
1. 为什么连OpenSSH版本号都要藏?这不是小题大做很多人第一次听说“要隐藏SSH版本号”,第一反应是:这玩意儿不就是个登录提示吗?又不是密码,至于这么紧张?我刚入行那会儿也这么想。直到有次在客户现场做渗透…...

韭菜盒子VSCode插件:开发者的终极投资情报中心完整指南
韭菜盒子VSCode插件:开发者的终极投资情报中心完整指南 【免费下载链接】leek-fund :chart_with_upwards_trend: 韭菜盒子VSCode插件,可以看股票、基金、期货等实时数据。 LeekFund turns your VS Code and Cursor into a real-time stock, fund, and fu…...

英雄联盟终极自动化工具:5分钟快速上手League Akari完整指南
英雄联盟终极自动化工具:5分钟快速上手League Akari完整指南 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 还在为繁琐的游戏操作…...

告别熬夜改 PPT!okbiye AI PPT,毕业论文答辩的 “救场神器”
okbiye-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPTAI PPT制作 - Okbiye智能写作https://www.okbiye.com/ppt 一、前言:答辩 PPT,毕业季的头号难题 又到了毕业季,多少同学卡在了毕业论文答辩 PPT 这一步?论…...

记忆学习导向的高速运动感知图像的去模糊及目标识别【附数据】
✨ 长期致力于深度卷积网络、长短期记忆网络、相机高速运动感知、运动去模糊、运动目标识别研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)融合DCNN与…...

数字主权还是数字枷锁?德国eIDAS钱包的Apple/Google账户依赖之困
数字主权还是数字枷锁?德国eIDAS钱包的Apple/Google账户依赖之困 2025年的深秋,一则来自德国联邦内政部(BMI)的技术文档在开发者社区引发了轩然大波。文档明确指出,即将在德国落地的eIDAS钱包——这个承载着欧盟数字身…...

QMcDump终极指南:三步解锁QQ音乐加密文件,实现音乐自由
QMcDump终极指南:三步解锁QQ音乐加密文件,实现音乐自由 【免费下载链接】qmcdump 一个简单的QQ音乐解码(qmcflac/qmc0/qmc3 转 flac/mp3),仅为个人学习参考用。 项目地址: https://gitcode.com/gh_mirrors/qm/qmcdum…...
)
别再为DBSCAN调参发愁了!用Python的sklearn轻松上手OPTICS聚类(附实战代码)
用OPTICS算法告别DBSCAN调参噩梦:Python实战全解析当面对不规则形状或密度不均的数据集时,密度聚类算法往往能大显身手。DBSCAN作为其中最著名的代表,却让无数数据科学家又爱又恨——它的表现极度依赖两个关键参数ε和MinPts的选择࿰…...