模拟Stevens Lewis描述的小型飞机纵向动力学的非线性动态反演控制器研究(Matlab代码实现)
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
针对Stevens和Lewis描述的小型飞机纵向动力学的非线性动态,研究非线性动态反演控制器可以是一个有趣的课题。动态反演控制器的目标是通过了解系统的动力学方程和状态信息,从而在实时中实现对系统的反演和控制。
下面是研究步骤:
1. 系统建模:首先,你需要建立小型飞机的纵向动力学模型。这可能包括纵向运动方程、气动力模型以及控制效应模型等。这些方程需要考虑飞行器的质量、惯性、空气动力学特性等因素。你可以参考Stevens和Lewis的工作以及其他相关文献,以获取合适的模型。
2. 系统特性分析:在完成系统建模后,你可以进行系统特性分析。使用非线性系统理论,分析系统的稳定性、可控性和可观测性等特性。这些分析将有助于理解系统行为和设计控制器。
3. 动态反演控制器设计:基于系统的动力学方程和特性分析结果,设计动态反演控制器。动态反演控制器的目标是通过在线估计系统未知参数和外部扰动,实时计算出对应的控制指令。这种控制器的优势在于对系统参数变化和未建模动态的鲁棒性。
4. 仿真与验证:实施动态反演控制器,并使用仿真工具模拟小型飞机的纵向运动。通过输入一组初始条件和控制指令,在仿真环境中进行验证和评估控制器的性能。可以使用 MATLAB、Simulink 或其他仿真软件来进行此步骤。
5. 实际实验:如果仿真结果令人满意,可以考虑在实际小型飞机上实施该控制器,并进行飞行试验。在实验中收集数据,并与仿真结果进行比较和分析,以验证控制器的有效性。
需要注意的是,小型飞机的纵向动力学是一个复杂的问题,需要掌握相关的飞行器动力学和控制理论知识。同时,确保你对动态反演控制器的基本原理和设计方法有充分的了解。
📚2 运行结果
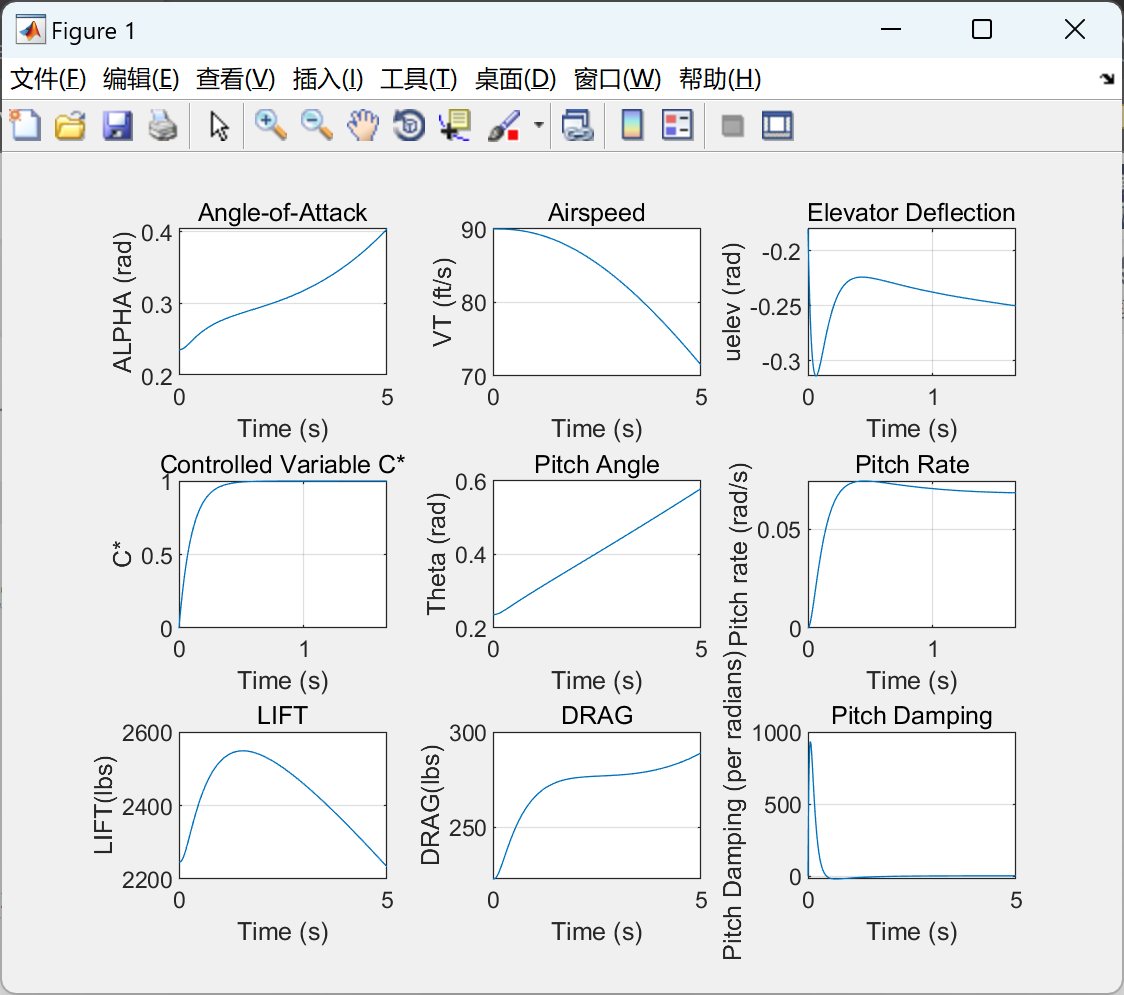
部分代码:
%% COMMAND INPUT
r=1; % Reference C* demand
rdot=0; % Reference rate
% Outputs
nz=(LIFT*cos(ALPHA)+DRAG*sin(ALPHA))/(G*MASS)-cos(THETA); % Normal acceleration [eq (2)]
nzp=nz+15*MOM/(G*IYY); % Normal acceleration at pilot's station [eq (3)]
cstar=nzp+12.4*Q; % Controlled C* variable [eq(4)]
y=cstar; % Output y=h(x)
%% DYNAMIC INVERSION CONTROL INPUT
e=r-y; % error
Fctrl=dhdx*f; % F(x)
Gctrl=dhdx*g; % G(x)
K=10; % Linear control gain
uelev=(-Fctrl+rdot+K*e)/Gctrl; % Control
%% Model State Equations
xdot=zeros(5,1);
xdot(1)=(FT*cos(ALPHA)-DRAG-WEIGHT*sin(GAMMA))/MASS; % Airspeed rate
xdot(2)=(-FT*sin(ALPHA)-LIFT+WEIGHT*cos(GAMMA))/(MASS*VT)+Q;% AoA rate
xdot(3)=Q; % Pitch rate
xdot(4)=MOM/IYY; % Pitch acceleration
xdot(5)=-20.2*EL+20.2*uelev; % Elevator rate
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]B.L. Steven & F.L. Lewis (2003) “Aircraft Flight Control & Simulation”, John Wiley (edition 2)
🌈4 Matlab代码实现
相关文章:
模拟Stevens Lewis描述的小型飞机纵向动力学的非线性动态反演控制器研究(Matlab代码实现)
目录 💥1 概述 📚2 运行结果 🎉3 参考文献 🌈4 Matlab代码实现 💥1 概述 针对Stevens和Lewis描述的小型飞机纵向动力学的非线性动态,研究非线性动态反演控制器可以是一个有趣的课题。动态反演控制器的目标…...
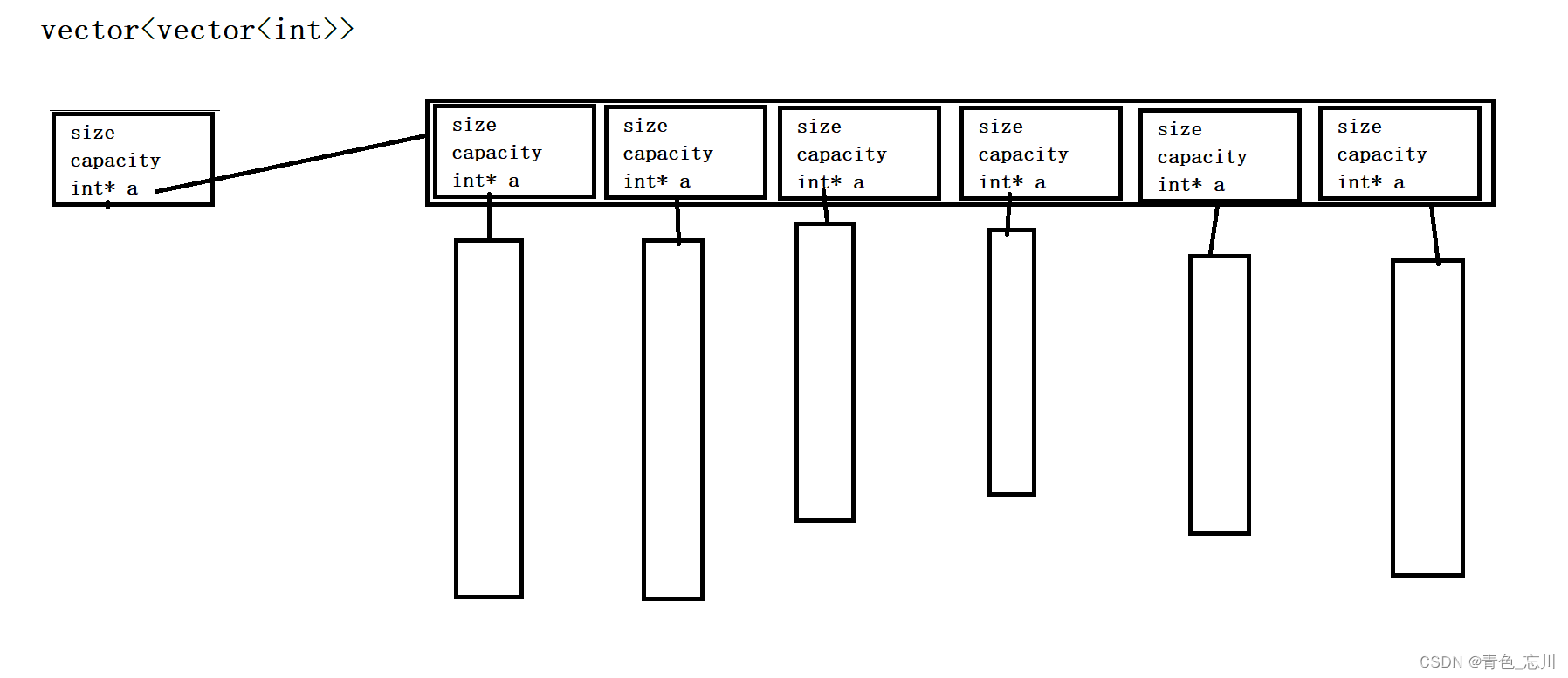
【C++从0到王者】第十二站:vector基本使用
文章目录 一、vector基本介绍二、vector的基本使用三、vector\<char> 和string的区别四、vector接口介绍1.vector的模板参数2.构造函数3.迭代器4.size和max_size5.resize和reserve6.operator[]和at7.front和back8.data9.push_back和pop_back10.insert和erase11.assign12.…...
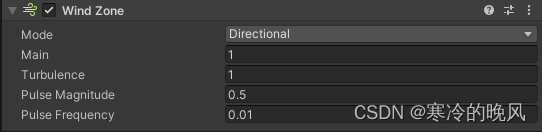
了解Unity编辑器之组件篇Miscellaneous(九)
一、Aim Constraint:是一种动画约束,用于使一个对象朝向另一个对象或一个指定的矢量方向 Activate按钮:用于激活或停用Aim Constraint。当Aim Constraint处于激活状态时,其约束效果将应用于目标对象。 Zero按钮:用于将…...

自动驾驶小车
开发自动驾驶小车涉及多个方面,包括硬件和软件。下面是一般情况下开发自动驾驶小车的主要步骤: 确定需求和功能:明确您的自动驾驶小车的目标和应用场景,确定需要的功能和特性,例如感知、决策、控制等。 硬件选择和安…...
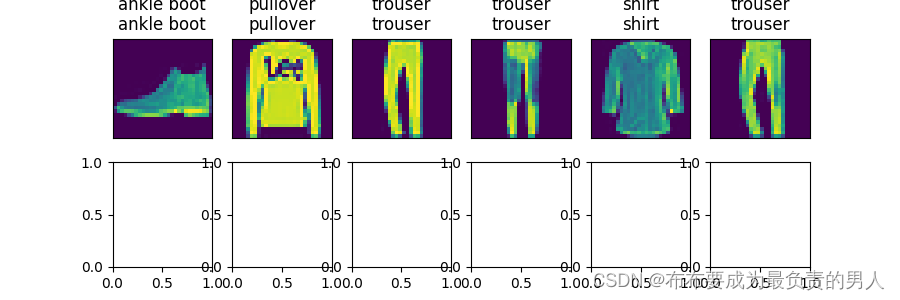
机器学习深度学习——多层感知机的从零开始实现
👨🎓作者简介:一位即将上大四,正专攻机器学习的保研er 🌌上期文章:机器学习&&深度学习——多层感知机 📚订阅专栏:机器学习&&深度学习 希望文章对你们有所帮助 为…...

Redis的基本使用命令
Redis的使用命令 Redis是一个开源的使用ANSI C编写、遵守BSD协议、支持网络、可基于内存亦可持久化的日志型、Key-Value数据库,并提供多种语言的API。它通常被称为数据结构服务器,因为值(value)可以是 字符串(String), 哈希(Hash…...

Ts入门到放弃
TS 的核心能力在于给 JS 提供静态类型检查,是有类型定义的 JS 的超集,包括 ES5、ES5 和其他一些诸如泛型、类型定义、命名空间等特征的集合。 本次仅会针对类型声明部分配合示例进行着重介绍,更详细的内容以及特性可以查看 Typescript handb…...

黑客技术(网络安全)学习笔记
一、网络安全基础知识 1.计算机基础知识 了解了计算机的硬件、软件、操作系统和网络结构等基础知识,可以帮助您更好地理解网络安全的概念和技术。 2.网络基础知识 了解了网络的结构、协议、服务和安全问题,可以帮助您更好地解决网络安全的原理和技术…...

Cloud Kernel SIG 月度动态:支持龙芯和申威架构,合入两个内存新特性
Cloud Kernel SIG(Special Interest Group):支撑龙蜥内核版本的研发、发布和服务,提供生产可用的高性价比内核产品。 01 SIG 整体进展 Cloud Kernel 开始支持龙芯和申威架构。 合入两个内存新特性:MEMCG LRU LOCK 和…...
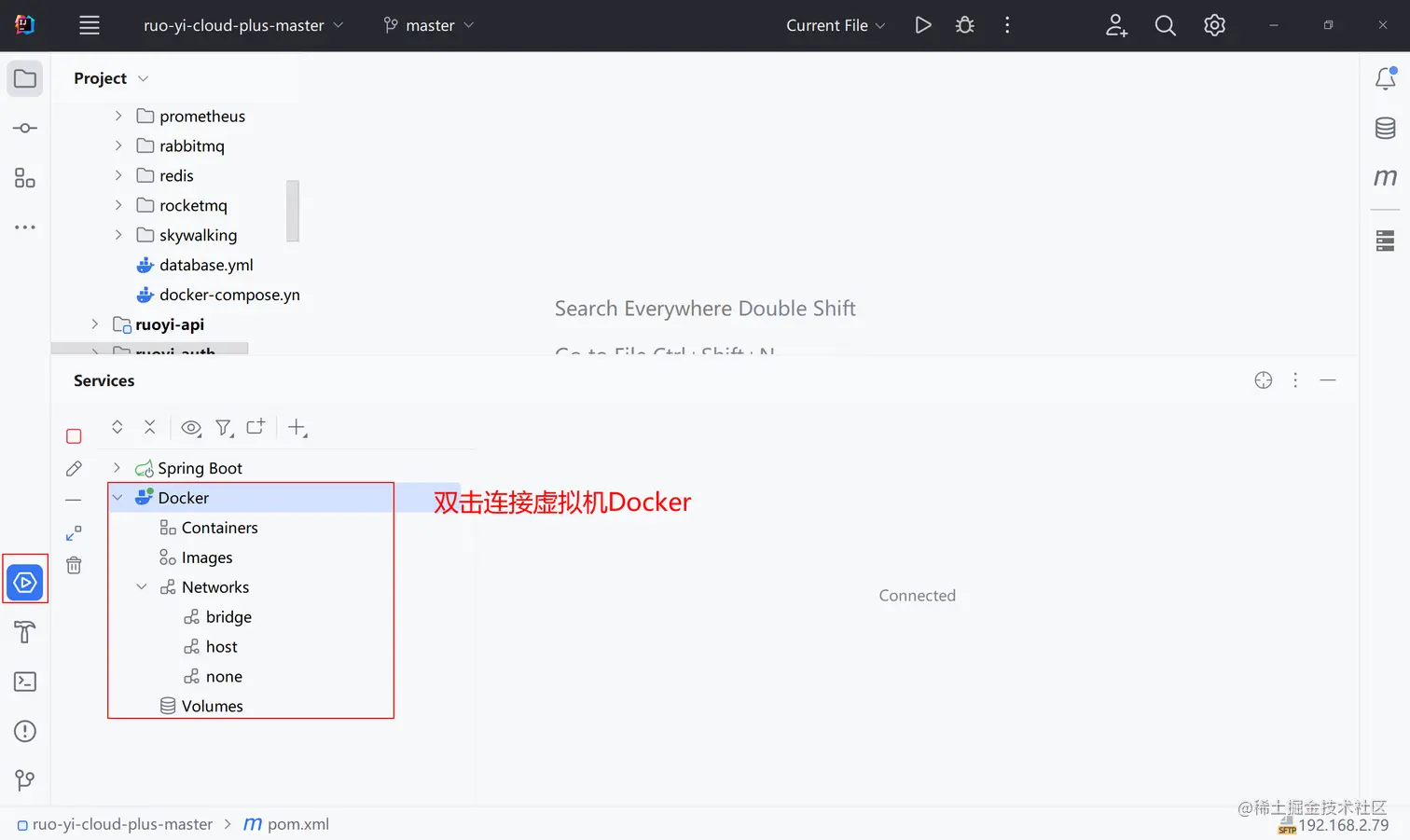
IDEA中连接虚拟机 管理Docker
IDEA中连接虚拟机 管理Docker 📔 千寻简笔记介绍 千寻简笔记已开源,Gitee与GitHub搜索chihiro-notes,包含笔记源文件.md,以及PDF版本方便阅读,且是用了精美主题,阅读体验更佳,如果文章对你有帮…...
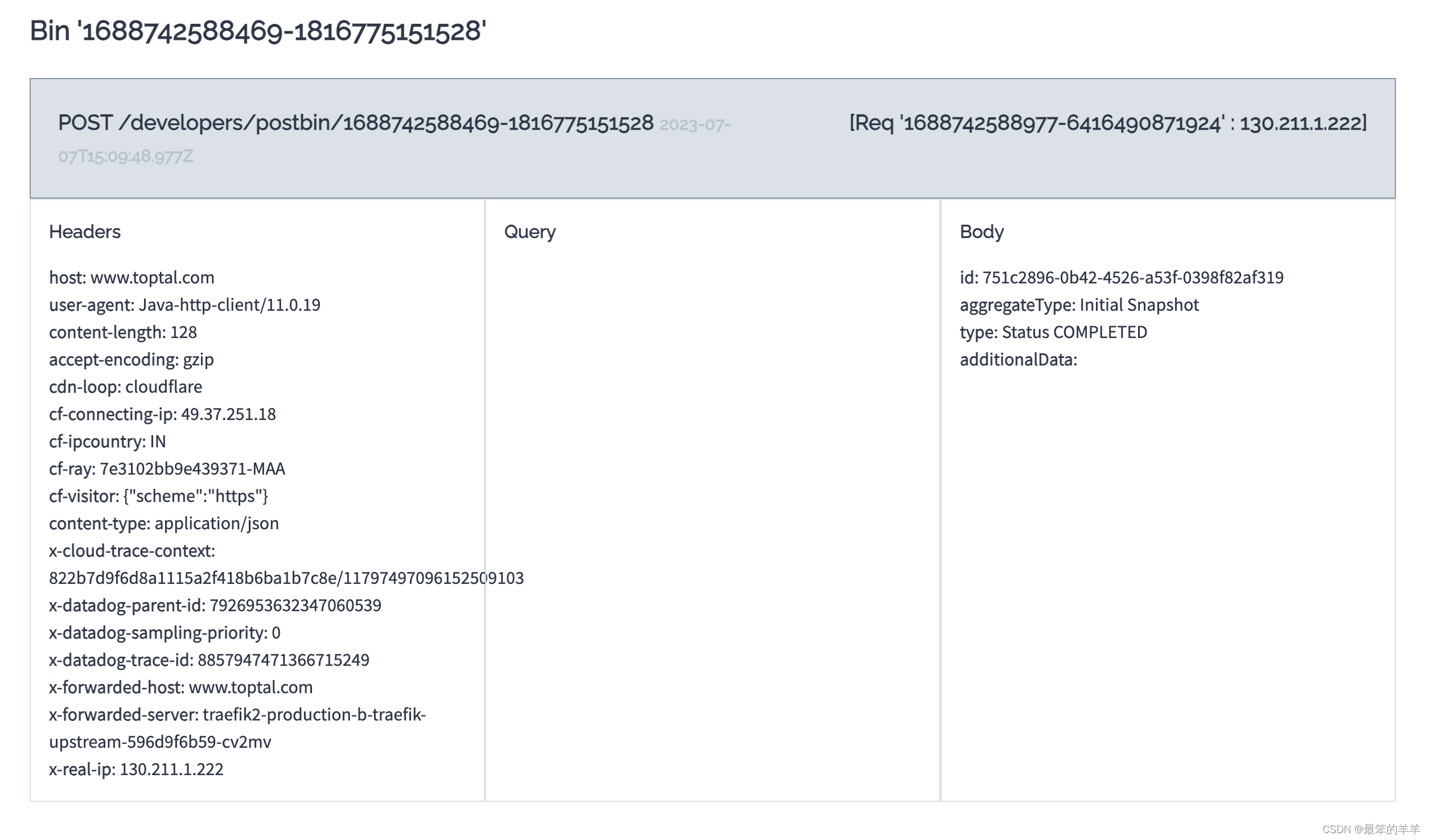
Debezium日常分享系列之:定制Debezium 信号发送和通知
Debezium日常分享系列之:定制Debezium 信号发送和通知 一、自定义信号和通知通道二、结论 Debezium 2.3 在信号和通知功能方面引入了新的改进。除了 Debezium 提供的预定义信号和通知通道之外,您还可以设置新的信号和通知通道。此功能使用户能够自定义系…...
实现思路)
RpcProvider(rpc服务提供者)实现思路
RpcProvider(服务提供者)实现思路 上一节说到,如何将一个本地服务发布成远程服务,但没有说明一个rpc框架怎么进行调用的,看看上节代码 #include <iostream> #include <string> #include "user.pb.h…...
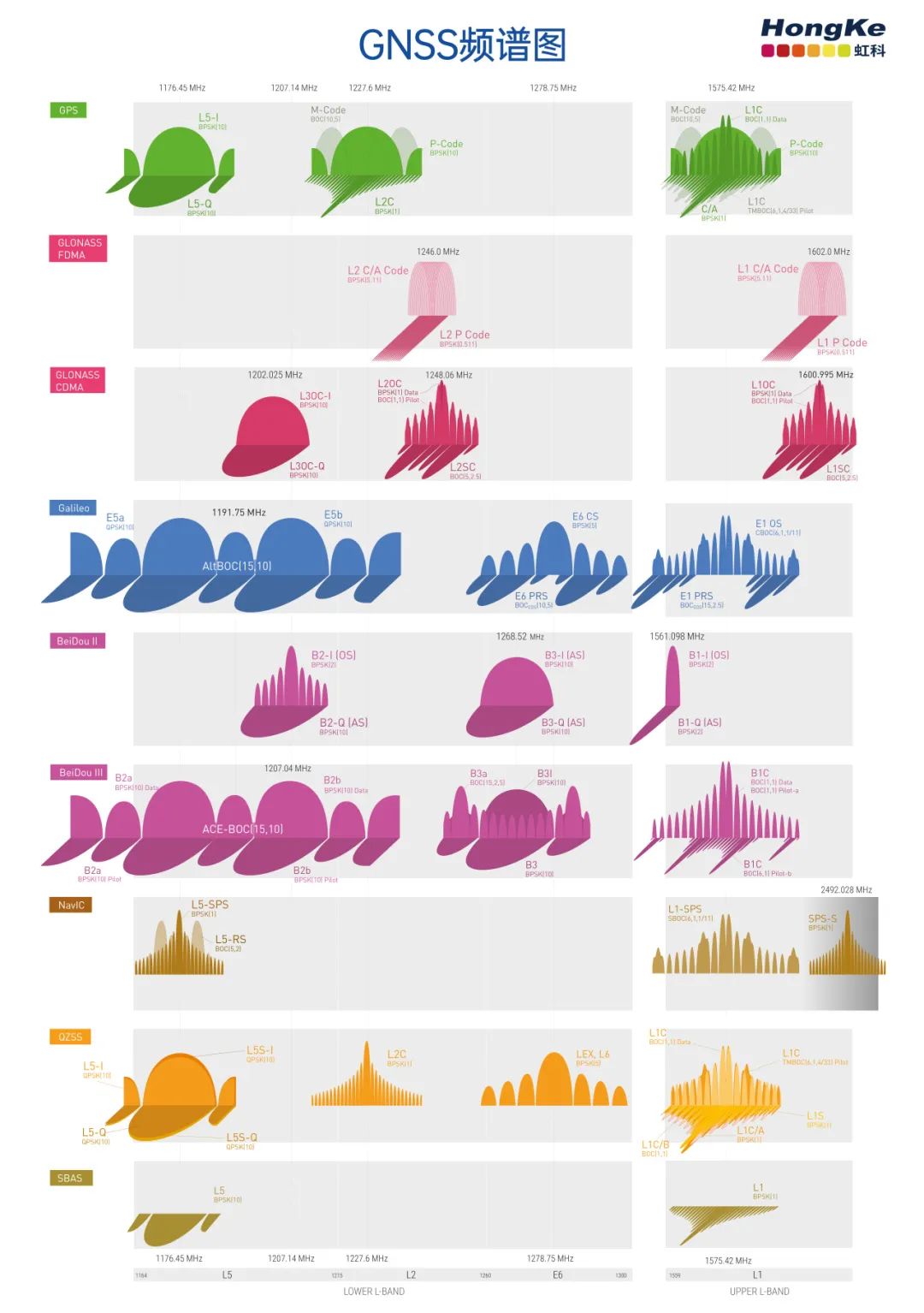
GNSS技术知识你知道多少?这些你或许还未掌握
GNSS信号频段 GNSS频谱图展示了不同的GNSS信号及其星座、载波频率、调制方案,以及所有这些信号在同一L波段频段内如何相互关联,是GNSS专业人员的必备工具,包括设计和开发GNSS系统的工程师,以及测试GNSS系统的工程师。 GNSS术语 …...
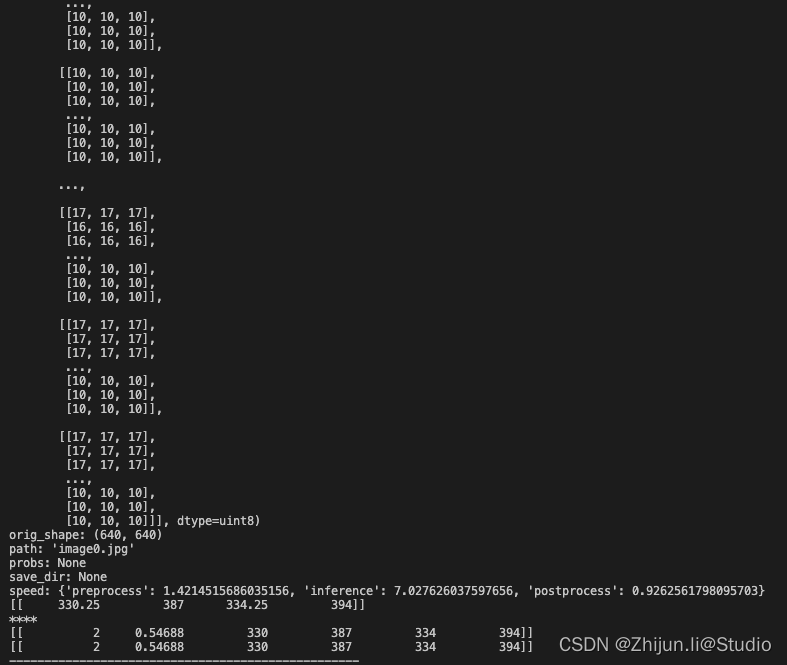
YOLOv8教程系列:三、使用YOLOv8模型进行自定义数据集半自动标注
YOLOv8半自动标注 目标检测半自动标注的优点包括: 1.提高标注效率:算法能够自动标注部分数据,减少了人工标注的工作量,节省时间和资源。 2.降低成本:自动标注可以减少人工标注的成本,特别是对于大规模数据…...

AI聊天GPT三步上篮!
1、是什么? CHATGPT是OpenAI开发的基于GPT(Generative Pre-trained Transformer)架构的聊天型人工智能模型。也就是你问它答,根据网络抓去训练 2、怎么用? 清晰表达自己诉求,因为它就是一个AI助手&#…...

如何彻底卸载VMware
目录 第一章、停止并卸载VMware程序1.1)停止VMware有关的服务1.2)打开任务管理器停止进程1.3)卸载VMware程序 第二章、残留文件删除2.1)打开注册表2.2)删除注册表残留文件2.3)C盘文件删除 友情提醒…...
[个人笔记] Windows配置NTP时间同步
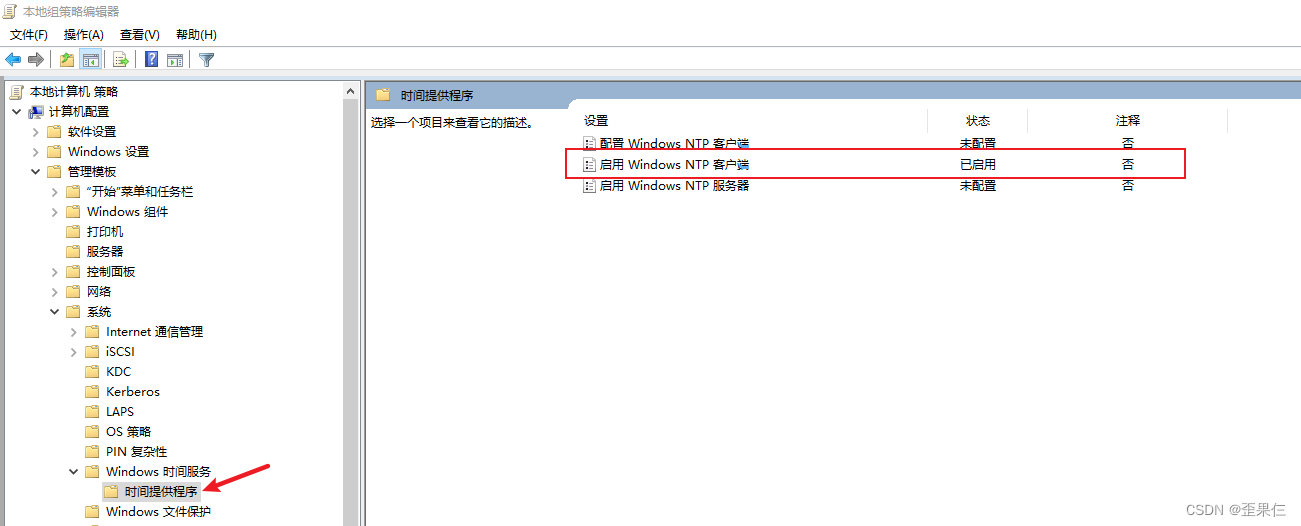
Windows - 运维篇 第六章 Windows配置NTP时间同步 Windows - 运维篇系列文章回顾Windows配置NTP时间同步域控环境的NTP配置工作组环境的NTP配置Windows的CMD部分命令集 参考来源 系列文章回顾 第一章 迁移WinSrv系统到虚拟机 第二章 本地安全策略xcopy实现实时备份文件夹内容 …...

Jetson Docker 编译 FFmpeg 支持硬解nvmpi和cuvid
0 设备和docker信息 设备为NVIDIA Jetson Xavier NX,jetpack版本为 5.1.1 [L4T 35.3.1] 使用的docker镜像为nvcr.io/nvidia/l4t-ml:r35.2.1-py3,详见https://catalog.ngc.nvidia.com/orgs/nvidia/containers/l4t-ml 使用下列命令拉取镜像: sudo docker pull nvcr…...

某某某小说app接口抓包分析
详细说明查看原文 https://sdk.qzbonline.com/ver9/shuhuajs/sdk/ioszh_shuhuajs_conf.htmlhttps://sdk.qzbonline.com/prov8/ymqxs/sdk/ios_ymqxs_conf.htmlhttps://sdk.qzbonline.com/prov8/ymqxs/sdk/ios_ymqxs_conf2.htmlhttps://sdk.qzbonline.com/prov8/fqhyxs/sdk/iosz…...
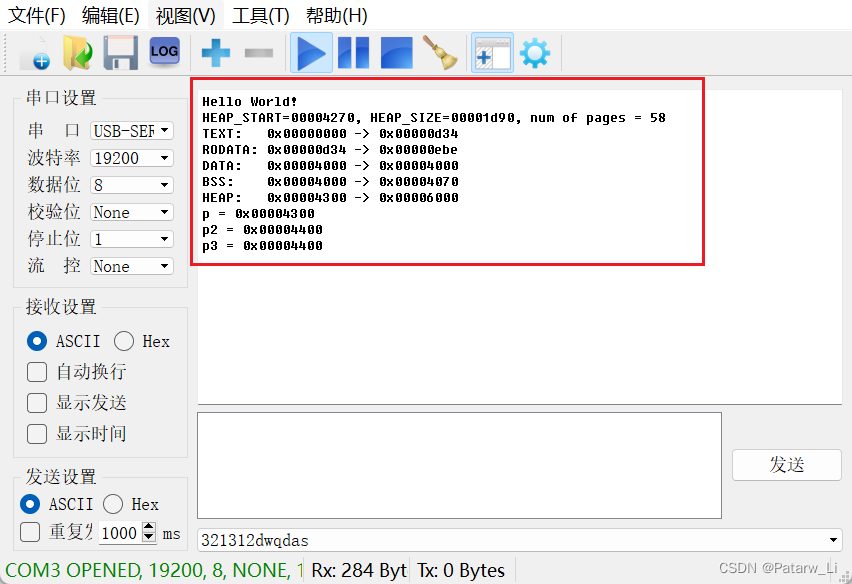
开发一个RISC-V上的操作系统(四)—— 内存管理
目录 往期文章传送门 一、内存管理简介 二、Linker Script 链接脚本 三、动态分配内存 四、测试 往期文章传送门 开发一个RISC-V上的操作系统(一)—— 环境搭建_riscv开发环境_Patarw_Li的博客-CSDN博客 开发一个RISC-V上的操作系统(二…...

iTorrent:iPhone上最强大的种子下载器终极指南
iTorrent:iPhone上最强大的种子下载器终极指南 【免费下载链接】iTorrent Torrent client for iOS 16 项目地址: https://gitcode.com/gh_mirrors/it/iTorrent 想在iPhone上轻松下载种子文件,却苦于iOS系统限制?iTorrent这款专业的iOS…...

CANN/pypto:Tensor构造函数
pypto.Tensor构造函数 【免费下载链接】pypto PyPTO(发音: pai p-t-o):Parallel Tensor/Tile Operation编程范式。 项目地址: https://gitcode.com/cann/pypto 产品支持情况 产品是否支持Atlas A3 训练系列产品/Atlas A3 推理系列产品…...

硬件工程选型解析:钡特电源VB60-24S12LD与金升阳URB2412LD-60WR3同属工业高可靠
在工业硬件研发、设备调试与批量量产工作中,大功率工业DC-DC模块的工况适配性、结构规范性与运行稳定性,是硬件研发工程师重点核查的核心指标,直接决定工控设备、电力终端、智能装备的长期运行可靠性。在60W级国产直流电源模块品类中…...

Windows下C语言编译指南
学习C语言入门有一定难度,需勤加练习。多数人使用Windows系统,那么在Windows环境下如何编译运行C语言程序?掌握合适工具与方法是关键。1、 学习C语言时,我使用的是Visual C 6.0编译器。如今,Windows系统下还可使用功能…...
)
LeetCode--112. 路径总和(二叉树)
题目描述 给你二叉树的根节点 root 和一个表示目标和的整数 targetSum 。判断该树中是否存在 根节点到叶子节点 的路径,这条路径上所有节点值相加等于目标和 targetSum 。如果存在,返回 true ;否则,返回 false 。 叶子节点 是指没…...

从用户一句话到任务完成:Hermes Agent 一次请求完整链路详解
一、先说结论:Hermes 不是“问一句答一句”的普通聊天框很多人理解 AI 应用时,会把它想成一个 Chatbot:用户发一句话,模型回一句话。但 Hermes Agent 的请求链路更像一个“任务操作系统”。用户的一句话进入系统后,Her…...

AI驱动的DNA分析平台:简化生物信息学流程
1. 项目概述:当生物信息学遇上“开箱即用”的AI逻辑引擎“BIOREASON”这个名字一出现,我就下意识在笔记本上画了个双螺旋和神经网络的交叉草图——不是为了炫技,而是因为过去八年里,我亲手调试过三十多套DNA分析流程,从…...

即插即用AI记忆协议:跨模型兼容的记忆中间件
1. 项目概述:不是“插件”,而是一套可即插即用的AI记忆增强协议你有没有遇到过这样的情况:刚让大模型帮你梳理完一份30页产品需求文档的逻辑漏洞,转头问它“第三章提到的用户分层标准是否和第五章的测试样本筛选条件冲突”&#x…...

Linux内核调试利器:/proc/sysrq-trigger原理与实战指南
1. 内核调试的“后门”:/proc/sysrq-trigger 深度解析在Linux内核开发和系统调试的深水区,当系统完全无响应、键盘鼠标失灵,甚至SSH连接都彻底中断时,常规的调试手段往往束手无策。这时,一个隐藏在/proc文件系统中的特…...

提示词失效?Midjourney印象派出图不稳的8大陷阱,资深AIGC架构师逐帧解析SD/MJ风格迁移差异
更多请点击: https://codechina.net 第一章:提示词失效的本质:当语义熵击穿Midjourney的隐空间边界 当“cyberpunk cat wearing neon sunglasses, ultra-detailed, 8k”生成结果突然坍缩为 a blurry humanoid silhouette with cat ears&…...