常微分方程建模R包ecode(二)——绘制相速矢量场
本节中我们考虑一个更为复杂的常微分方程模型,
d X C d t = ν ( X A + Y A ) − β ⋅ X C ⋅ ( Y C + Y A ) − ( μ + g ) ⋅ X C , ( 1 ) d Y C d t = β ⋅ X C ⋅ ( Y C + Y A ) − ( μ + g + ρ ) ⋅ Y C , ( 2 ) d X A d t = g ⋅ X C − β ⋅ X A ⋅ ( Y C + Y A ) , ( 3 ) d Y A d t = β ⋅ X A ∗ ( Y C + Y A ) + g ∗ Y C − ρ ∗ Y A ( 4 ) \frac{dX_C}{dt} = \nu (X_A + Y_A) - \beta · X_C · (Y_C + Y_A) - (\mu + g) · X_C, \quad(1) \\ \frac{dY_C}{dt} = \beta · X_C · (Y_C + Y_A) - (\mu + g + \rho) · Y_C, \quad(2)\\ \frac{dX_A}{dt} = g · X_C - \beta · X_A · (Y_C + Y_A), \quad (3) \\ \frac{dY_A}{dt} = \beta · X_A * (Y_C + Y_A) + g * Y_C - \rho * Y_A \quad(4) dtdXC=ν(XA+YA)−β⋅XC⋅(YC+YA)−(μ+g)⋅XC,(1)dtdYC=β⋅XC⋅(YC+YA)−(μ+g+ρ)⋅YC,(2)dtdXA=g⋅XC−β⋅XA⋅(YC+YA),(3)dtdYA=β⋅XA∗(YC+YA)+g∗YC−ρ∗YA(4)
该常微分方程系统用于模拟一种树木传染病动态,其中 X C X_C XC代表易感树苗(susceptible sapling)的个体数, Y C Y_C YC代表感病树苗(infected sapling)的个体数, X A X_A XA代表易感成年树木的个体数(susceptible adult), Y A Y_A YA代表感病成年树木(infected adult)的个体数。显然 X C , Y C , X A , Y A ≥ 0 X_C,Y_C,X_A,Y_A≥0 XC,YC,XA,YA≥0。
( 1 ) (1) (1)式中, ν ( X A + Y A ) \nu (X_A + Y_A) ν(XA+YA)代表繁殖产生新树苗的速率,其中 ν \nu ν是繁殖速率。 − β ⋅ X C ⋅ ( Y C + Y A ) -\beta · X_C · (Y_C + Y_A) −β⋅XC⋅(YC+YA)指的是由于疾病传染,导致易感树苗转化为感病树苗的速率,其中 β \beta β为传染率。 − ( μ + g ) ⋅ X C , - (\mu + g) · X_C, −(μ+g)⋅XC,是指由于自然死亡及树木成长,导致易感树苗被移除,或是进入到易感成年树木的速率,其中 μ \mu μ为自然死亡率, g g g为树木生长率。
( 2 ) (2) (2)式中, β ⋅ X C ⋅ ( Y C + Y A ) \beta · X_C · (Y_C + Y_A) β⋅XC⋅(YC+YA)代表由易感树苗被传染而转化为感病树苗的速率, − ( μ + g + ρ ) ⋅ Y C - (\mu + g + \rho) · Y_C −(μ+g+ρ)⋅YC则包含自然死亡、树木成长、因疾病感染而死亡这三个过程,其中 ρ \rho ρ代表由于传染病而导致的死亡率。
( 3 ) (3) (3)式中, g ⋅ X C g · X_C g⋅XC代表由于树木生长而使易感树苗转换为易感成年树木的速率, − β ⋅ X A ⋅ ( Y C + Y A ) - \beta · X_A · (Y_C + Y_A) −β⋅XA⋅(YC+YA)代表由于疾病传染,使易感成年大树转换为感病成年大树的速率。
( 4 ) (4) (4)式中, β ⋅ X A ∗ ( Y C + Y A ) \beta · X_A * (Y_C + Y_A) β⋅XA∗(YC+YA)对应于疾病传染过程, g ∗ Y C g * Y_C g∗YC对应于树木生长过程, − ρ ∗ Y A -\rho * Y_A −ρ∗YA对应于疾病导致的死亡过程。
研究一个常微分方程系统,最为直接的方法是研究其相速矢量场(phase velocity vector filed)。下面我们回顾一下与相速矢量场相关的几个重要概念,
常微分方程中的几个重要概念
相空间(phase space):是指所有模型变量的所有可能取值的组合构成的空间。在本节案例中,相空间为 { ( X C , Y C , X A , Y A ) ∣ X C , Y C , X A , Y A ≥ 0 } \{(X_C,Y_C,X_A,Y_A)| X_C,Y_C,X_A,Y_A≥0\} {(XC,YC,XA,YA)∣XC,YC,XA,YA≥0}。
相点(phase point):相空间中的任意一个点称为相点。相点用于描述系统的状态。在本节案例中,相点 ( X C , Y C , X A , Y A ) = ( 10 , 60 , 20 , 100 ) (X_C,Y_C,X_A,Y_A)=(10,60,20,100) (XC,YC,XA,YA)=(10,60,20,100)代表系统中有10棵易感树苗、60棵感病树苗、20棵易感成树、100棵感病成树。
相速矢量(phase velocity vector):系统位于某一相点时,其速度大小和方向构成的矢量,叫做该相点所对应的相速矢量。在本节案例中,针对相点 ( X C , Y C , X A , Y A ) = ( 10 , 60 , 20 , 100 ) (X_C,Y_C,X_A,Y_A)=(10,60,20,100) (XC,YC,XA,YA)=(10,60,20,100),将 X C , Y C , X A , Y A X_C,Y_C,X_A,Y_A XC,YC,XA,YA的值代入式 ( 1 − 4 ) (1-4) (1−4),求出 ( d X C d t , d Y C d t , d X A d t , d Y A d t ) (\frac{dX_C}{dt}, \frac{dY_C}{dt} , \frac{dX_A}{dt} , \frac{dY_A}{dt}) (dtdXC,dtdYC,dtdXA,dtdYA),其值便是该相点所对应的相速矢量。相速矢量描述了系统位于某一相点时的运动方向和快慢。
相速矢量场(phase velocity vector field):相空间中所有相速矢量组成的集合。
相位曲线(phase curve):相点沿相速矢量场移动所形成的运动轨迹。
在ecode包中,当函数plot作用于eode类的对象时,plot函数会自动绘制出某个常微分方程系统的相速矢量场,或相速矢量。在上一节中,我们介绍了当常微分方程系统中含有两个模型变量时,plot函数的用法。
本节所关注的模型含有四个模型变量 X C , Y C , X A , Y A X_C,Y_C,X_A,Y_A XC,YC,XA,YA,因而将介绍含有多个模型变量时,plot函数的行为。
一、绘制相速矢量场
首先我们在ecode包中构建上述模型(式 ( 1 − 4 ) (1-4) (1−4)):
library(ecode)dX_Cdt <- function(X_C, Y_C, X_A, Y_A, nu = 0.15, beta = 0.1, mu = 0.15, g = 0.04)nu * (X_A + Y_A) - beta * X_C * (Y_C + Y_A) - (mu + g) * X_CdY_Cdt <- function(X_C, Y_C, Y_A, beta = 0.1, mu = 0.15, g = 0.04, rho = 0.2)beta * X_C * (Y_C + Y_A) - (mu + g + rho) * Y_CdX_Adt <- function(X_C, Y_C, X_A, Y_A, beta = 0.1, g = 0.04)g * X_C - beta * X_A * (Y_C + Y_A)dY_Adt <- function(X_A, Y_C, Y_A, beta = 0.1, g = 0.04, rho = 0.2)beta * X_A * (Y_C + Y_A) + g * Y_C - rho * Y_Ax <- eode(dX_Cdt = dX_Cdt, dY_Cdt = dY_Cdt, dX_Adt = dX_Adt, dY_Adt = dY_Adt)
x
### An ODE system: 4 equations
### equations:
### dX_Cdt = nu * (X_A + Y_A) - beta * X_C * (Y_C + Y_A) - (mu + g) * X_C
### dY_Cdt = beta * X_C * (Y_C + Y_A) - (mu + g + rho) * Y_C
### dX_Adt = g * X_C - beta * X_A * (Y_C + Y_A)
### dY_Adt = beta * X_A * (Y_C + Y_A) + g * Y_C - rho * Y_A
### variables: X_C Y_C X_A Y_A
### parameters: nu = 0.15, beta = 0.1, mu = 0.15, g = 0.04, rho = 0.2
### constraints: X_A<1000 X_A>0 X_C<1000 X_C>0 Y_A<1000 Y_A>0 Y_C<1000 Y_C>0
由于我们没有在模型中指定模型变量的范围,ecode包自动将变量范围设置在 ( 0 , 1000 ) (0,1000) (0,1000)内。此时调用plot函数,
plot(x)
### Set X_A = 500, Y_A = 500 for mapping in two axis
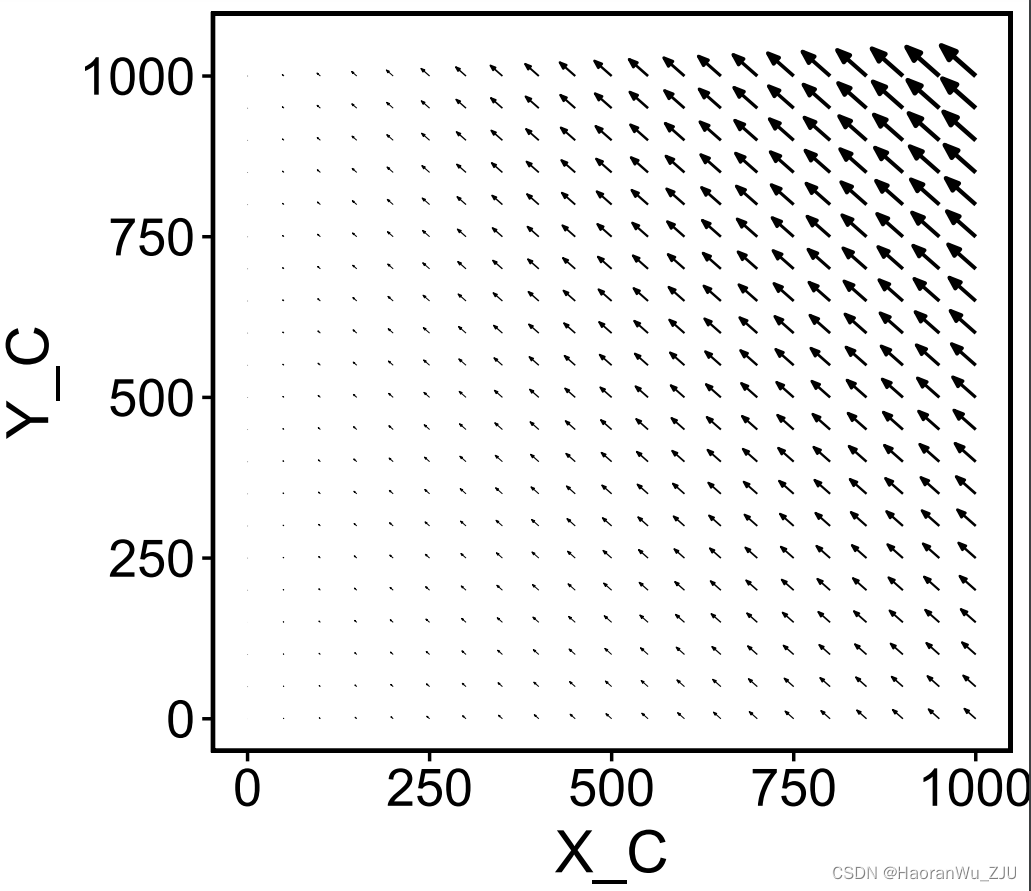
输出结果如图所示。plot函数自动限制了 X A = 500 , Y A = 500 X_A = 500, Y_A = 500 XA=500,YA=500,并以 X C , Y C X_C, Y_C XC,YC为横、纵坐标系绘制相速矢量场。需要注意的是,该相速矢量图仅仅表示 X A , Y A X_A,Y_A XA,YA为固定值时的相速矢量场,该矢量场位于相空间内部的一个平面。
当常微分方程组含有多个模型变量时,如果不给
plot任何参数,则plot函数默认会以常微分方程中前两个变量为坐标轴绘制相速矢量场,而其余变量将会被赋上一个固定值,其值等于该模型变量范围的中值。
二、自定义模型变量的值
如果不希望以 X A = 500 , Y A = 500 X_A = 500, Y_A = 500 XA=500,YA=500为限制条件,则可以在plot函数中添加set_covar参数,
plot(x, set_covar = list(X_A = 10, Y_A = 20))
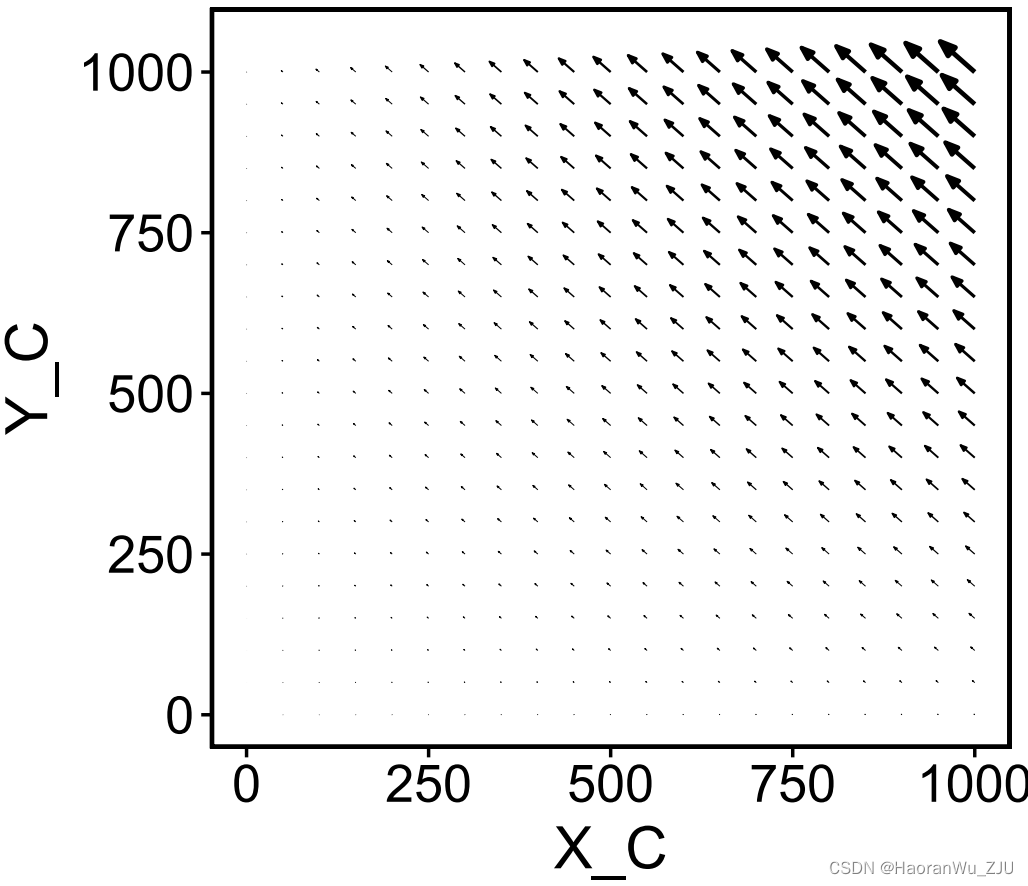 此时,
此时,plot函数给出的是 X A = 10 , Y A = 20 X_A=10, Y_A=20 XA=10,YA=20株时,以 X C , Y C X_C,Y_C XC,YC为坐标轴作出的相速矢量场。
如果想要固定 X C , Y C X_C, Y_C XC,YC,以 X A , Y A X_A, Y_A XA,YA为坐标轴作相速矢量场,则
plot(x, set_covar = list(X_C = 10, Y_C = 20))
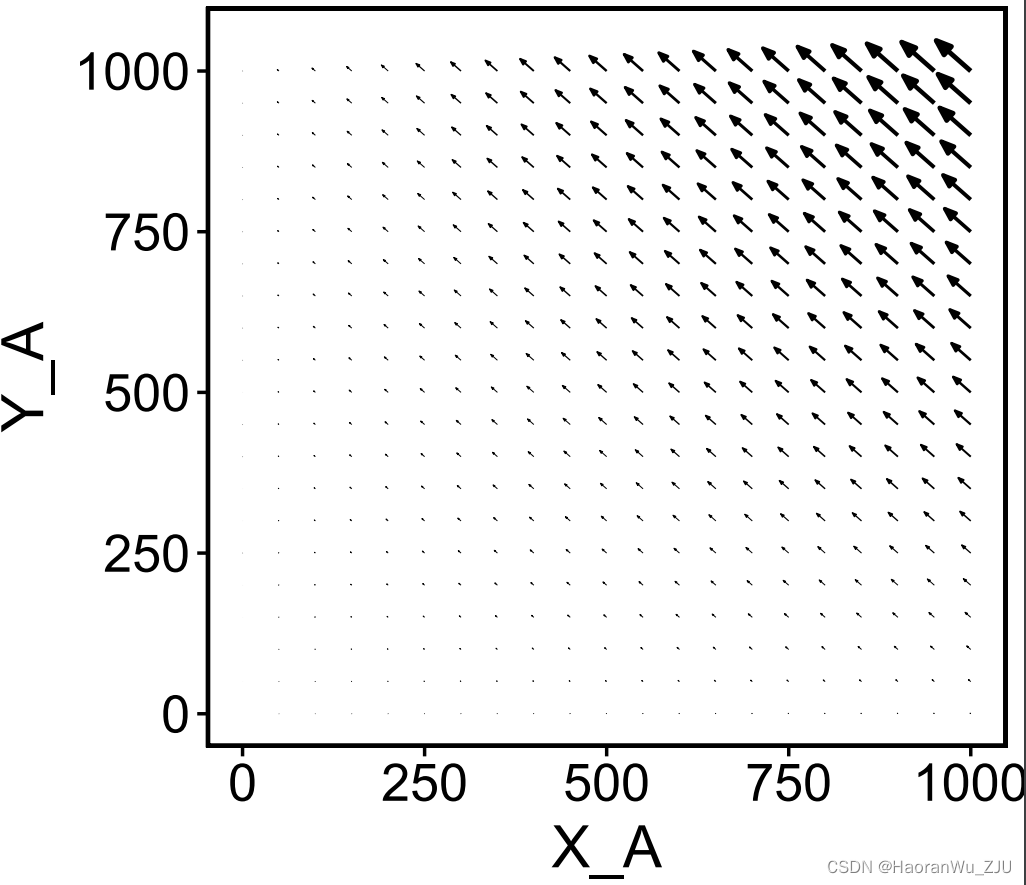
此为 X C = 10 , Y C = 20 X_C=10, Y_C=20 XC=10,YC=20时,以 X A , Y A X_A, Y_A XA,YA为坐标轴的相速矢量场。
三、自定义模型变量的范围
上一节中已经提到,可以采用eode_set_constraint重新设置模型变量的范围。例如,以下代码将 X C , Y C , X A , Y A X_C, Y_C, X_A, Y_A XC,YC,XA,YA的范围位置为 ( 0 , 5 ) (0,5) (0,5),
x <- eode_set_constraint(x, new_constraint = c("X_C<5","Y_C<5","X_A<5","Y_A<5"))
x
### An ODE system: 4 equations
### equations:
### dX_Cdt = nu * (X_A + Y_A) - beta * X_C * (Y_C + Y_A) - (mu + g) * X_C
### dY_Cdt = beta * X_C * (Y_C + Y_A) - (mu + g + rho) * Y_C
### dX_Adt = g * X_C - beta * X_A * (Y_C + Y_A)
### dY_Adt = beta * X_A * (Y_C + Y_A) + g * Y_C - rho * Y_A
### variables: X_C Y_C X_A Y_A
### parameters: nu = 0.15, beta = 0.1, mu = 0.15, g = 0.04, rho = 0.2
### constraints: X_A<5 X_A>0 X_C<5 X_C>0 Y_A<5 Y_A>0 Y_C<5 Y_C>0
接下来,我们尝试固定 X A = 2 , Y A = 2 X_A = 2, Y_A = 2 XA=2,YA=2,以 X C , Y C X_C, Y_C XC,YC为坐标轴,绘制相速矢量场,
plot(x, set_covar = list(X_A = 2, Y_A = 2))
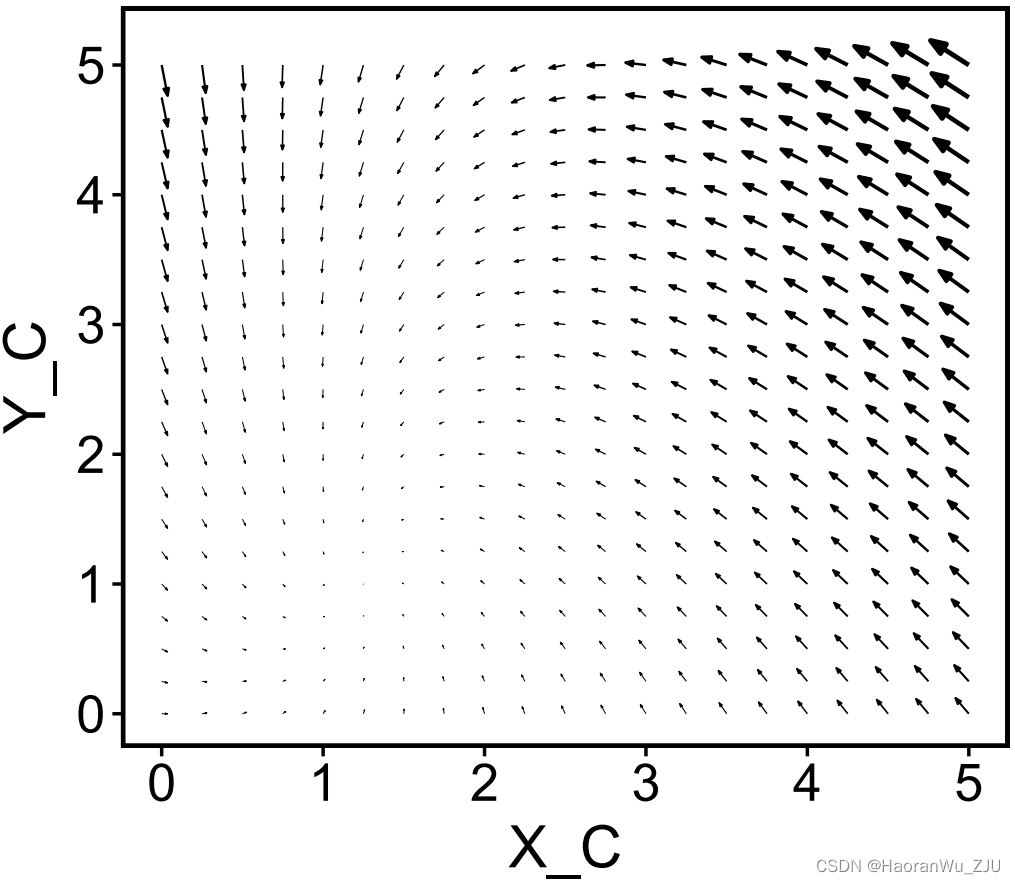
可以看到,该常微分方程组似乎在 X C , Y C X_C, Y_C XC,YC的值很小时存在使 d X C / d t , d Y C / d t = 0 dX_C/dt, dY_C/dt=0 dXC/dt,dYC/dt=0的点。
四、一维相速矢量场
如果一个常微分方程只有一个模型变量,或者在含有 n n n个模型变量的常微分方程组中,有 ( n − 1 ) (n-1) (n−1)个变量的值都被固定了,那么plot函数就会绘制一维的相速矢量场。
现在我们尝试固定 X A = 2 , Y A = 2 , X C = 2 X_A = 2, Y_A = 2, X_C = 2 XA=2,YA=2,XC=2。这样,只剩下模型变量 X A X_A XA的值没有被固定。plot函数将以 X A X_A XA为唯一的坐标轴,绘制一维的相速矢量场,
plot(x, set_covar = list(X_A = 2, Y_A = 2, X_C = 2))
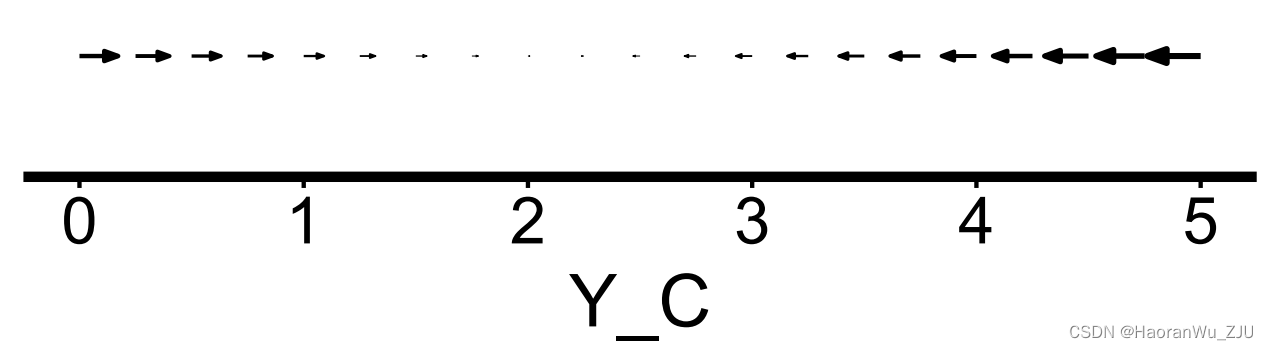
其中,每个相速矢量的值代表的是 d Y C / d t dY_C/dt dYC/dt在某一相点的对应值。
五、相速矢量
当所有模型变量都被赋值时,plot函数将会作出某一相点所对应的相速矢量。在相空间中,相速矢量的起点在其对应的相点,长度代表相点在相点在该处运动的速率。例如,在本节案例中,位于相点 ( X C 0 , Y C 0 , X A 0 , Y A 0 ) (X_{C0},Y_{C0},X_{A0},Y_{A0}) (XC0,YC0,XA0,YA0)的相速矢量的值为,
( d X C / d t , d Y A / d t , d X A / d t , d Y A / d t ) ∣ X C = X C 0 , Y C = Y C 0 , X A = X A 0 , Y A = Y A 0 (dX_C/dt,dY_A/dt,dX_A/dt,dY_A/dt)|_{X_{C}=X_{C0}, Y_{C}=Y_{C0}, X_{A}=X_{A0}, Y_{A}=Y_{A0}} (dXC/dt,dYA/dt,dXA/dt,dYA/dt)∣XC=XC0,YC=YC0,XA=XA0,YA=YA0
调用plot时,plot函数会画出相速矢量在各个维度上的值,
plot(x, set_covar = list(X_A = 2, Y_A = 2, X_C = 2, Y_C = 2))
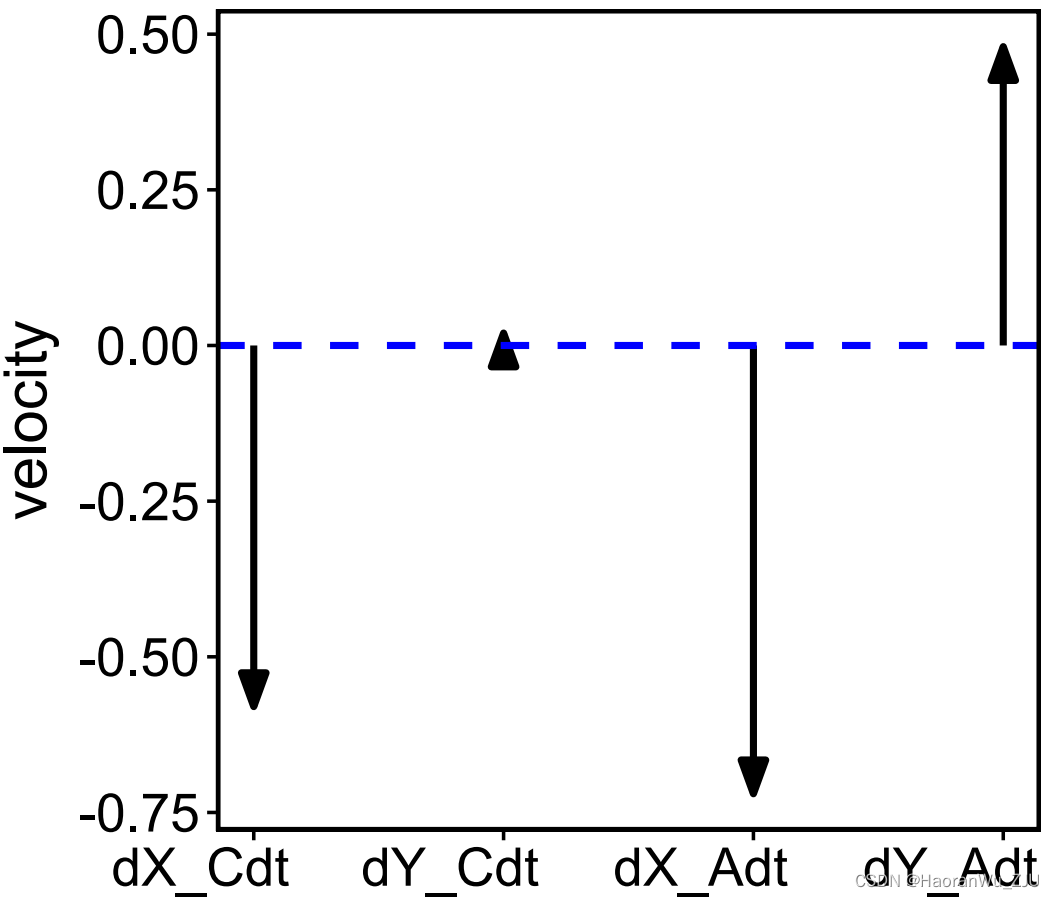
该图给出了相点 ( 2 , 2 , 2 , 2 ) (2,2,2,2) (2,2,2,2)所对应的相速矢量,其中横坐标的每一个标签代表相速矢量在某一维度上的分解值,即 d X C / d t ∣ X C = 2 , d Y C / d t ∣ Y C = 2 , d X A / d t ∣ X A = 2 , d Y A / d t ∣ Y A = 2 dX_C/dt|_{X_C=2}, dY_C/dt|_{Y_C=2}, dX_A/dt|_{X_A=2}, dY_A/dt|_{Y_A=2} dXC/dt∣XC=2,dYC/dt∣YC=2,dXA/dt∣XA=2,dYA/dt∣YA=2。
如何引用
Wu, H. (2023). ecode: An R package to investigate community dynamics in ordinary differential equation systems. bioRxiv, 2023-06.
原文见bioRxiv。
相关文章:
常微分方程建模R包ecode(二)——绘制相速矢量场
本节中我们考虑一个更为复杂的常微分方程模型, d X C d t ν ( X A Y A ) − β ⋅ X C ⋅ ( Y C Y A ) − ( μ g ) ⋅ X C , ( 1 ) d Y C d t β ⋅ X C ⋅ ( Y C Y A ) − ( μ g ρ ) ⋅ Y C , ( 2 ) d X A d t g ⋅ X C − β ⋅ X A ⋅ ( Y C Y A …...

学习C#编写上位机的基础知识和入门步骤:
00001. 掌握C#编程语言基础和.NET框架的使用。 00002. 学习WinForm窗体应用程序开发技术,包括控件的使用和事件驱动编程。 00003. 熟悉基本的数据结构和算法知识,如链表、栈、队列等。 00004. 理解串口通信协议和通信方法,用于与底层硬件设…...
简单高效!低代码搭建销售自动化程序的方法与实践
在当今数字化时代,销售自动化成为了提高销售效率和业绩的重要手段之一。而低代码平台的兴起,使得搭建销售自动化程序变得更加简单和高效。本文将介绍低代码平台及其优势,并探讨如何利用低代码平台搭建销售自动化程序。 1、低代码平台 1&…...

第九十三回 在Flutter中mock数据
文章目录 概念介绍使用方法示例代码 我们在上一章回中介绍了"在Flutter中解析JSON数据"相关的内容,本章回中将介绍 如何mock数据.闲话休提,让我们一起Talk Flutter吧。 概念介绍 我们在本章回中介绍的mock数据主要是通过相关的代码模拟服务器…...

进程与线程的区别与联系
多进程已经可以很好的实现并发编程的效果了,但是仍然有一个明显的缺点:进程太重了,进程消耗的资源更多,速度更慢。如果进程创建销毁不频繁,那么还好,一旦需要大规模创建和销毁进程,开销就比较大…...

使用gadl对土地利用栅格重分类
要使用Python语言进行土地利用栅格的重分类,可以使用gadl库(GDAL的Python绑定)来实现。gadl库提供了一组功能强大的函数和类,可用于读取、处理和分析栅格数据。 首先,确保已经安装了gadl库。可以使用以下命令通过pip进…...
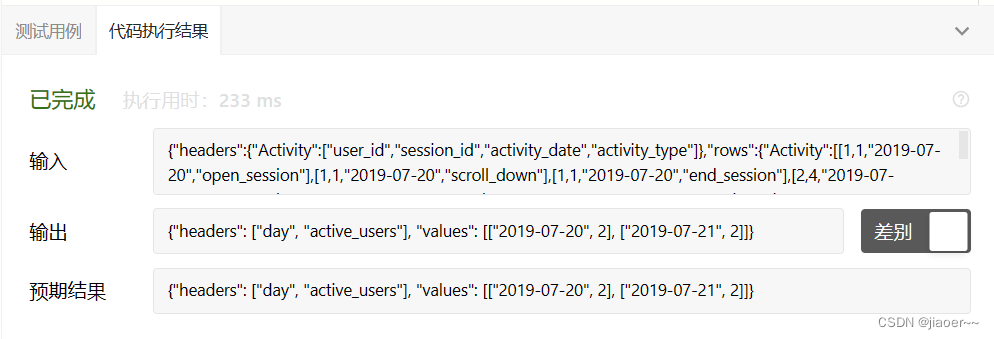
SQL-每日一题【1141. 查询近30天活跃用户数】
题目 活动记录表:Activity 请写SQL查询出截至 2019-07-27(包含2019-07-27),近 30 天的每日活跃用户数(当天只要有一条活动记录,即为活跃用户)。 以 任意顺序 返回结果表。 查询结果示例如下。…...
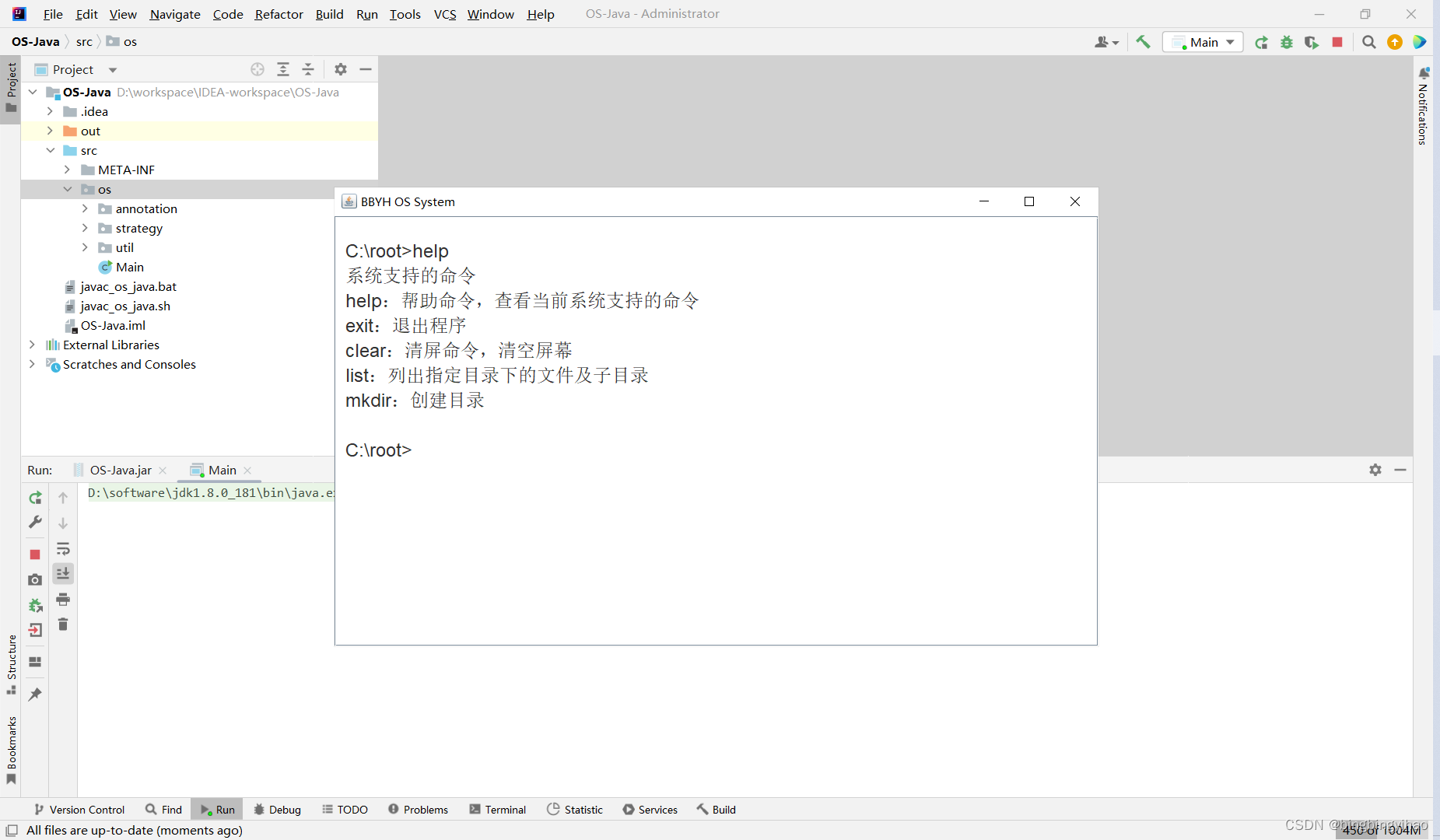
Java小型操作系统模拟(采用策略模式结合反射进行搭建,支持一些简单的命令)
Java小型操作系统模拟 项目说明第一阶段:反射结合策略模式搭建基本的命令结构第二阶段:注解结合反射与策略模式,将结构进一步规范第三阶段:开启新的窗口,将控制台输入切换到新窗口中,同时创建右键菜单&…...
VsCode与Idea编辑器更换背景图
目录 VsCode Idea VsCode 需要安装background插件 安装完成后,打开设置,搜索background 然后就可以在json文件进行图片设置,透明度等等 Idea 打开File -> Settings 然后找到Appearance , 往下滑,找到BackGround …...

Visual Studio 快捷键
记录一下VS的快捷键,用Xcode几个星期后回到VS一下子有点乱,还好有条件反射在,过了会就都恢复了 目录 跳转快捷键查找快捷键编辑快捷键代码折叠书签操作记忆来源VS一定要装VAssistX插件,下面的快捷键部分是VX提供的。 跳转快捷键 快速打开文件 Alt + Shift + O 快速打开对…...

IT技术面试中常见的问题及解答技巧
在IT技术面试中,面试官常常会问到一些常见的问题,针对这些问题,我们可以充分准备和提前准备一些解答技巧。下面我将分享一些我个人的经验和观察,希望对大家有所帮助。 请介绍一下你的项目经验。 在回答这个问题时,我们…...
Java使用hive连接kyuubi
一、Maven依赖 <dependency><groupId>org.apache.hive</groupId><artifactId>hive-jdbc</artifactId><version>2.3.9</version> </dependency> 二、相关配置信息 驱动类:org.apache.hive.jdbc.HiveDriver连接UR…...

性能测试基础知识(三)性能指标
性能测试基础知识(三)性能指标 前言一、时间特性1、响应时间2、并发数3、吞吐量(TPS) 二、资源特性1、CPU利用率2、内存利用率3、I/O利用率4、网络带宽使用率5、网络传输速率(MB/s) 三、实例场景 前言 性能…...

【 Redis】的乱码问题
问题描述: 使用RedisTemplate存储的数据,在 redis-cli 客户端查看时,key 和 value 都会携带类似\xac\xad\这样的字符串。 原因: 由于默认使用了 jdk 的序列化方式。以下是支持的序列化方式 项目一般都会有缓存,常常…...
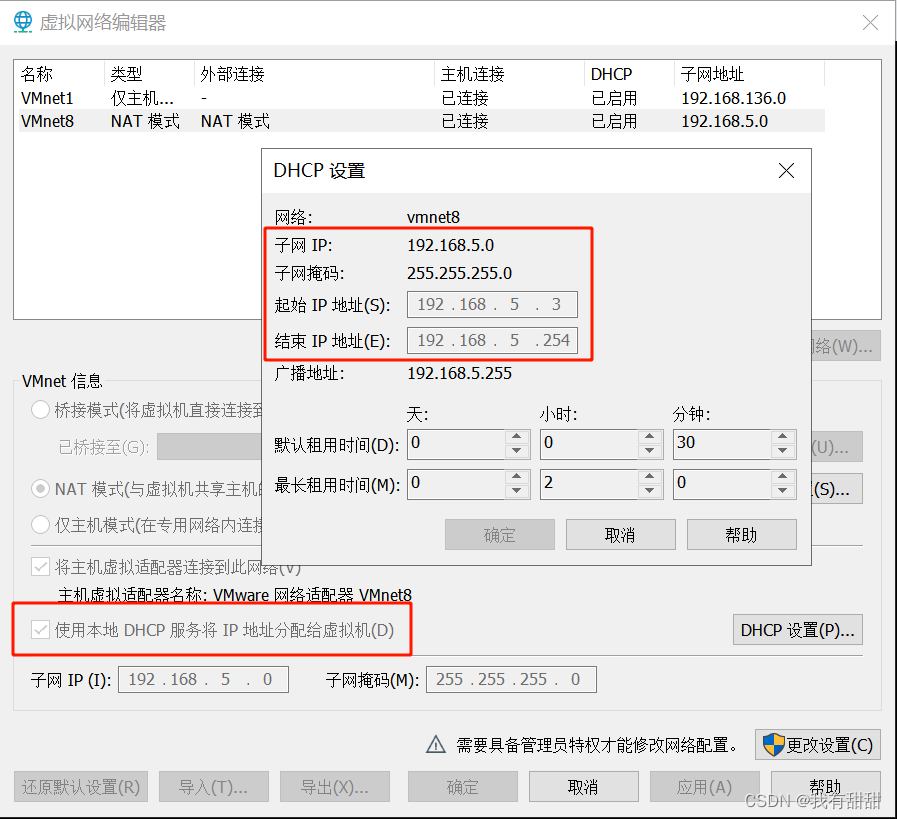
虚拟机安装的问题
CentOS7报错: Host SMBus Controller not enabled! 1.在上图界面中直接输入root用户的密码登录到系统 2.输入命令,lsmod | grep i2c 3.输入命令,vi /etc/modprobe.d/blacklist.conf 创建黑名单,添加以下内容: blacklist i2c_piix…...
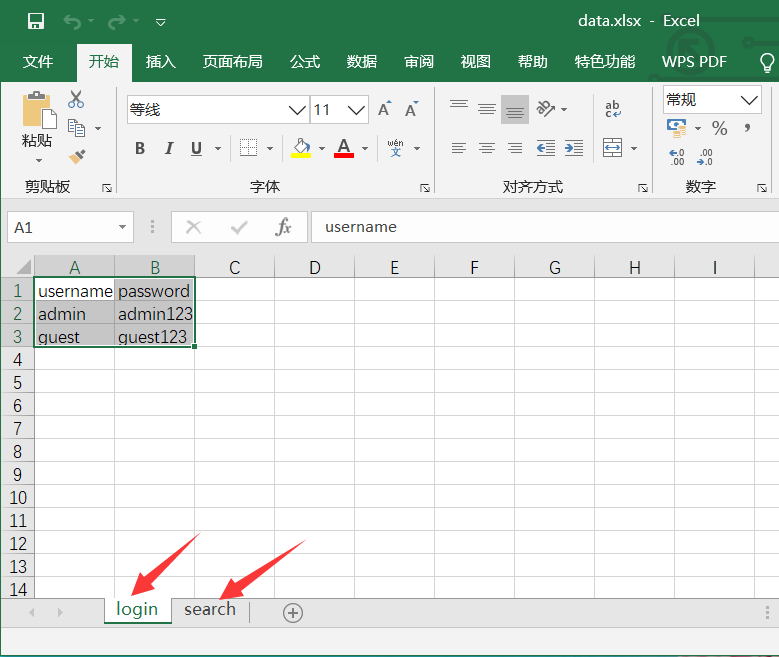
seldom之数据驱动
seldom之数据驱动 如果自动化某个功能,测试数据不一样而操作步骤是一样的,那么就可以使用参数化来节省测试代码。 seldom是我在维护一个Web UI自动化测试框,这里跟大家分享seldom参数化的实现。 GitHub:GitHub - SeldomQA/seld…...
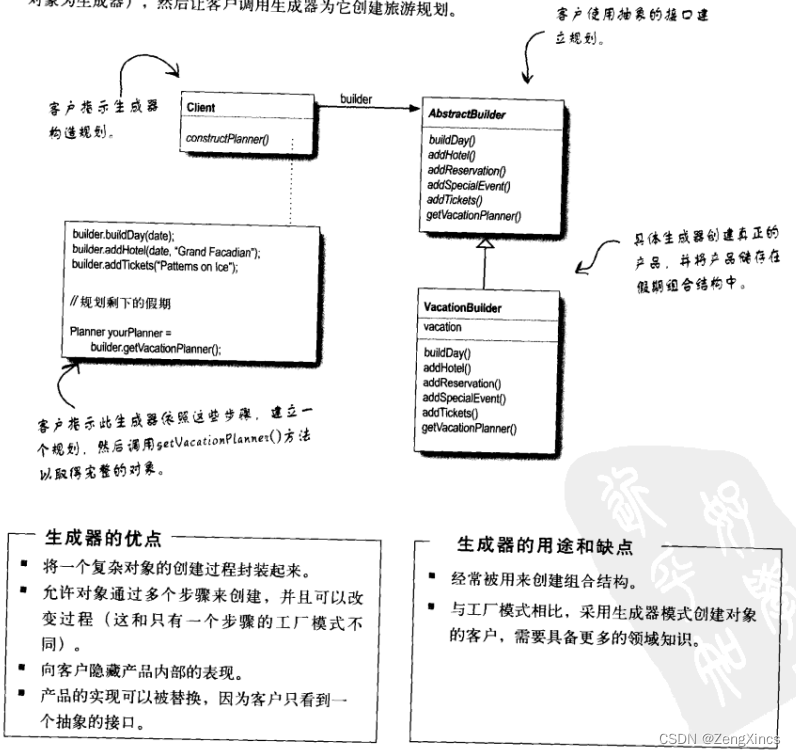
设计模式:生成器模式
这个模式书上讲的比较简单,但是感觉精华应该是讲到了。 引用下其它博客的总结:生成器模式的核心在于分离构建算法和具体的构造实现,从而使得构建算法可以重用。 【设计模式】建造者模式_鼠晓的博客-CSDN博客...
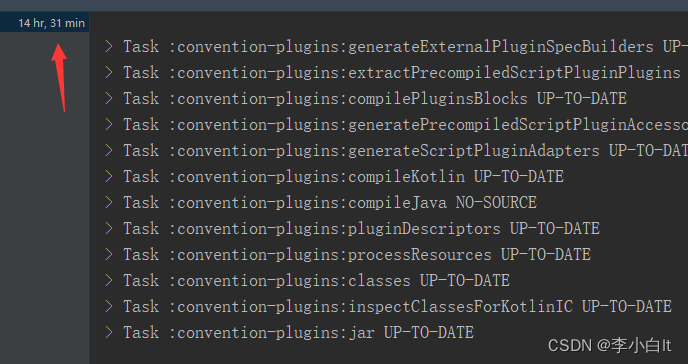
Gradle同步任务一直不动问题(非网络情况)
最近更新ComposeViews的Kotlin和Compose版本,升级到Kotlin1.9和Compose1.4.3时遇见一个问题,Gradle同步时始终会卡在一个位置,同步了一晚上也没用 然后又试了两次还是不行,猜测可能是Gradle的问题,于是使用命令行进行同步,并打印debug日志 ./gradlew -debug -refresh-dependen…...
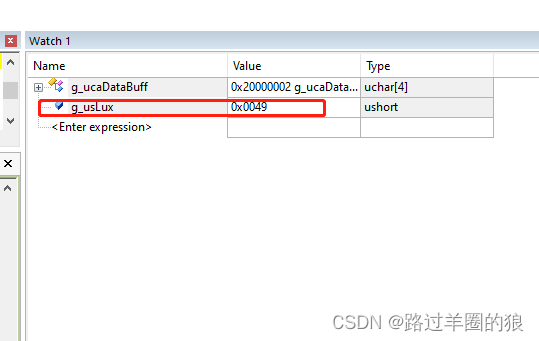
STM32使用HAL库BH1750光照度传感器
开发环境 单片机:STM32F103C8T6 光照度传感器:BH1750 IDE:KEILSTM32CUBEMX 单片机配置 1、STM32CUBEMX BH1750代码 1、头文件 /* ************************************************* BH1750光照数据计算(LUX) …...
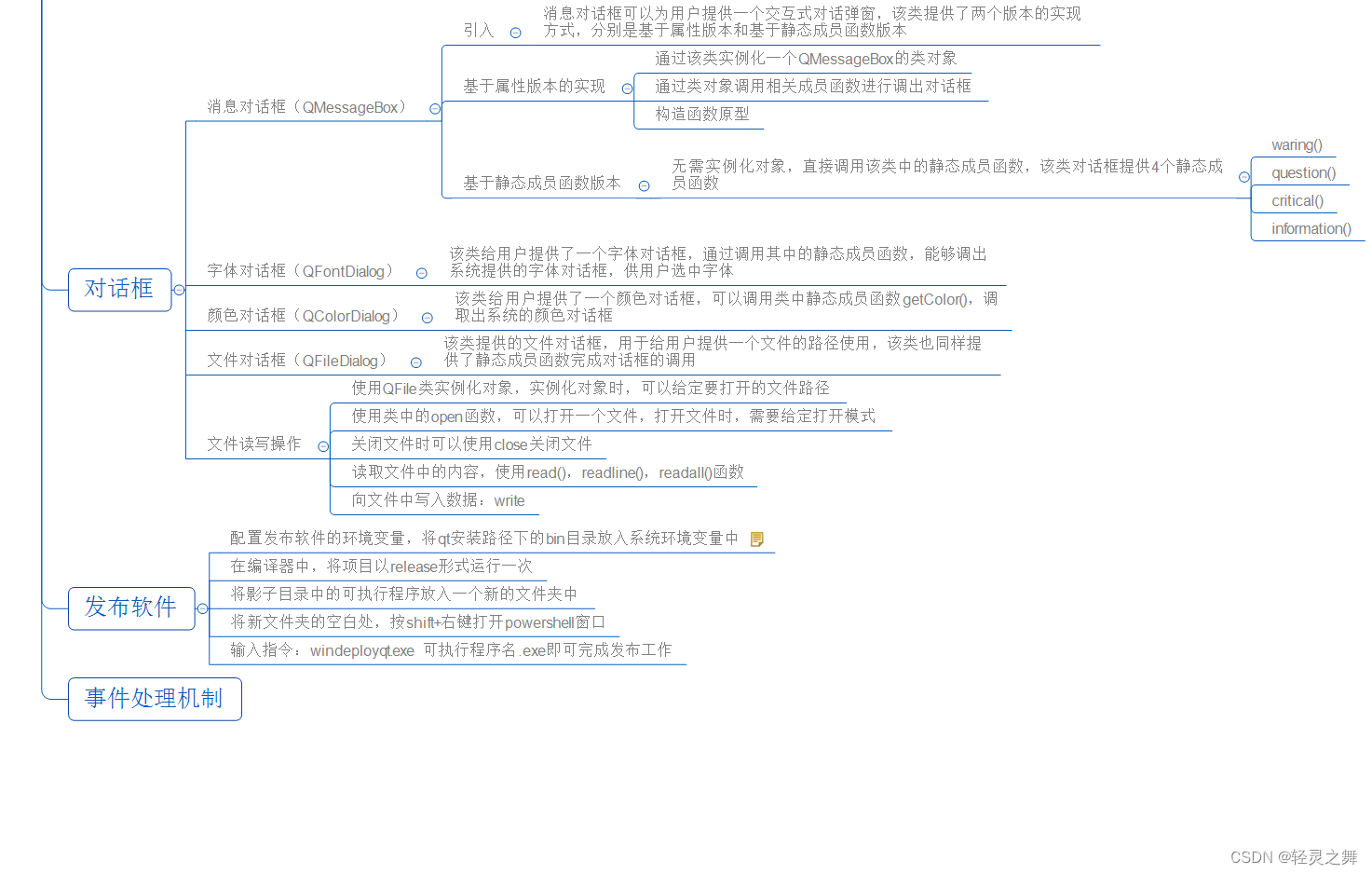
qt代码练习
计时器练习 namespace Ui { class third; }class third : public QWidget {Q_OBJECTpublic:explicit third(QWidget *parent nullptr);~third();QLabel *labth1 new QLabel(this);QTextEdit *txtth1 new QTextEdit("闹钟",this);QLineEdit *leth1 new QLineEdit(t…...

Windows热键冲突终极排查指南:5分钟快速定位占用进程
Windows热键冲突终极排查指南:5分钟快速定位占用进程 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-detective 你是否曾经…...

深度解析m4s-converter:B站缓存视频无损转换架构设计与性能优化
深度解析m4s-converter:B站缓存视频无损转换架构设计与性能优化 【免费下载链接】m4s-converter 一个跨平台小工具,将bilibili缓存的m4s格式音视频文件合并成mp4 项目地址: https://gitcode.com/gh_mirrors/m4/m4s-converter 在数字内容版权日益严…...

3个技巧让LaTeX参考文献自动符合GB/T 7714国标:告别手动排版烦恼
3个技巧让LaTeX参考文献自动符合GB/T 7714国标:告别手动排版烦恼 【免费下载链接】gbt7714-bibtex-style BibTeX styles for Chinese National Standard GB/T 7714 项目地址: https://gitcode.com/gh_mirrors/gb/gbt7714-bibtex-style 还在为毕业论文、学术论…...

树与二叉树:数据结构核心解析
引言在前面的文章中,我们已经系统学习了线性数据结构——链表、栈、队列。线性结构的特点是元素之间存在一对一的先后关系。然而,现实世界中的很多数据关系是一对多的:文件系统中的目录与子目录、公司的组织架构、网页的 DOM 结构……树&…...

把旧路由器改造成远程ADB调试服务器:OpenWrt安装adb与公网访问指南
旧路由器变身远程ADB调试服务器:OpenWrt实战指南 在移动应用开发过程中,频繁连接USB数据线进行调试不仅效率低下,更限制了开发者的工作灵活性。想象一下,当你需要同时调试多台设备,或者在不同网络环境下快速切换测试场…...

深入RISC-V链接脚本:从.lds文件看C程序的内存‘出生’与‘搬家’全过程
深入RISC-V链接脚本:从.lds文件看C程序的内存‘出生’与‘搬家’全过程 在嵌入式开发的世界里,一个C程序从源代码到最终在硬件上运行,经历了编译、链接和加载三个关键阶段。这个过程就像一个人的生命历程:编译是"出生"&…...

Faust高级特性:窗口聚合与状态管理完整教程
Faust高级特性:窗口聚合与状态管理完整教程 【免费下载链接】faust Python Stream Processing. A Faust fork 项目地址: https://gitcode.com/gh_mirrors/faus/faust 掌握Faust的窗口聚合与状态管理功能,构建高效的Python流处理应用!&…...

JSON格式强制输出失败,深度解析DeepSeek-R1/V3模型token级响应机制与schema约束绕过方案
更多请点击: https://intelliparadigm.com 第一章:JSON格式强制输出失败的现象与根本归因 典型失败现象 当后端服务(如 Go/Node.js/Python)尝试通过 HTTP 响应强制输出 JSON 数据时,常出现空响应、500 错误、或返回 …...

MASA模组汉化包终极指南:3分钟告别Minecraft英文界面困扰
MASA模组汉化包终极指南:3分钟告别Minecraft英文界面困扰 【免费下载链接】masa-mods-chinese 一个masa mods的汉化资源包 项目地址: https://gitcode.com/gh_mirrors/ma/masa-mods-chinese 你是否曾在Minecraft中使用Litematica、Minihud等MASA模组时&#…...

可穿戴电子入门:基于CircuitPython与3D打印的LED发光皇冠制作全解
1. 项目概述与核心思路如果你和我一样,对把电子设备“穿”在身上这件事着迷,那么可穿戴电子项目绝对能带来无穷的乐趣。它不仅仅是把一块电路板缝进衣服里那么简单,而是将微控制器、灯光、传感器这些冰冷的电子元件,与柔软的织物、…...