2023年电赛---运动目标控制与自动追踪系统(E题)OpenART mini的代码移植到OpenMV
前言
(1)已经有不少同学根据我上一篇博客完成了前三问,恭喜恭喜。有很多同学卡在了第四问。
(2)我说了OpenART mini的代码是可行的。但是他们不会移植到OpenMV上,再次我讲移植之后的代码贴出来。
(3)吐槽一下,我就看不懂了。为啥这么多人移植不了。这不是几分钟的事情吗?(苦笑)
识别矩形框以及对应角点
(1)这个地方的40行会出现一个奇怪的报错,说corner没有被定义。但是前面明明调用corner = r.corners()进行了一波定义。
(2)然后我在在前面写上了一句corner = 0,报错就消失了。这个bug很奇怪。希望各位注意
from machine import Pin
import sensor, image, time
import pyb
#import seekfree, pyb# 初始化TFT180屏幕
#lcd = seekfree.LCD180(3)# 初始化摄像头
sensor.reset()
sensor.set_pixformat(sensor.RGB565) # 设置图像色彩格式为RGB565格式
sensor.set_framesize(sensor.QQVGA) # 设置图像大小为160*120
sensor.set_auto_whitebal(True) # 设置自动白平衡
sensor.set_brightness(3000) # 设置亮度为3000
sensor.skip_frames(time = 20) # 跳过帧clock = time.clock()
corner = 0
while(True):clock.tick()img = sensor.snapshot()# -----矩形框部分-----# 在图像中寻找矩形for r in img.find_rects(threshold = 10000):# 判断矩形边长是否符合要求if r.w() > 20 and r.h() > 20:# 在屏幕上框出矩形img.draw_rectangle(r.rect(), color = (255, 0, 0), scale = 4)# 获取矩形角点位置corner = r.corners()# 在屏幕上圈出矩形角点img.draw_circle(corner[0][0], corner[0][1], 5, color = (0, 0, 255), thickness = 2, fill = False)img.draw_circle(corner[1][0], corner[1][1], 5, color = (0, 0, 255), thickness = 2, fill = False)img.draw_circle(corner[2][0], corner[2][1], 5, color = (0, 0, 255), thickness = 2, fill = False)img.draw_circle(corner[3][0], corner[3][1], 5, color = (0, 0, 255), thickness = 2, fill = False)# 打印四个角点坐标, 角点1的数组是corner[0], 坐标就是(corner[0][0],corner[0][1])# 角点检测输出的角点排序每次不一定一致,矩形左上的角点有可能是corner0,1,2,3其中一个corner1_str = f"corner1 = ({corner[0][0]},{corner[0][1]})"corner2_str = f"corner2 = ({corner[1][0]},{corner[1][1]})"corner3_str = f"corner3 = ({corner[2][0]},{corner[2][1]})"corner4_str = f"corner4 = ({corner[3][0]},{corner[3][1]})"print(corner1_str + "\n" + corner2_str + "\n" + corner3_str + "\n" + corner4_str)# 显示到屏幕上,此部分会降低帧率#lcd.show_image(img, 160, 120, 0, 0, zoom=0) #屏幕显示# 打印帧率#print(clock.fps())跟踪激光灯
from machine import Pin
import sensor, image, time
import pyb
#import seekfree, pyb# 初始化激光灯控制引脚P0,并置为高电平
laser_light=Pin("P0", Pin.OUT)
laser_light.value(1)# 初始化TFT180屏幕
#lcd = seekfree.LCD180(3)# 初始化摄像头
sensor.reset()
sensor.set_pixformat(sensor.RGB565) # 设置图像色彩格式为RGB565格式
sensor.set_framesize(sensor.QQVGA) # 设置图像大小为160*120
sensor.set_auto_whitebal(True) # 设置自动白平衡
sensor.set_brightness(3000) # 设置亮度为3000
sensor.skip_frames(time = 20) # 跳过帧clock = time.clock()while(True):clock.tick()img = sensor.snapshot()# -----跟踪激光部分-----# 设置激光颜色阈值red_td = [(56, 100, 45, 127, -128, 127)] # 这里要改# 根据阈值找到色块for b in img.find_blobs(red_td,pixels_threshold=2, area_threshold=15, merge=True,invert = 0):# 在屏幕上画出色块img.draw_rectangle(b.rect(), color = (0, 255, 0), scale = 2, thickness = 2)# 打印激光色块的中心位置# 使用b.x()获取色块矩形左上角X坐标# 使用b.y()获取色块矩形左上角Y坐标# 使用b.w()获取色块矩形宽度# 使用b.h()获取色块矩形高度# 矩形中心坐标为(x + w/2,y + h/2)print(f"rect = {b.x() + b.w()/2},{b.y() + b.h()/2}")break# 显示到屏幕上,此部分会降低帧率#lcd.show_image(img, 160, 120, 0, 0, zoom=0) #屏幕显示# 打印帧率#print(clock.fps())识别矩形框以及对应角点并跟踪激光灯
from machine import Pin
import sensor, image, time
#import seekfree, pyb
import pyb
# 初始化激光灯控制引脚,并置为高电平
laser_light=Pin("P9", Pin.OUT)
laser_light.value(1)# 初始化TFT180屏幕
#lcd = seekfree.LCD180(3)# 初始化摄像头
sensor.reset()
sensor.set_pixformat(sensor.RGB565) # 设置图像色彩格式为RGB565格式
sensor.set_framesize(sensor.QQVGA) # 设置图像大小为160*120
sensor.set_auto_whitebal(True) # 设置自动白平衡
sensor.set_brightness(3000) # 设置亮度为3000
sensor.skip_frames(time = 20) # 跳过帧clock = time.clock()while(True):clock.tick()img = sensor.snapshot()# -----矩形框部分-----# 在图像中寻找矩形for r in img.find_rects(threshold = 10000):# 判断矩形边长是否符合要求if r.w() > 20 and r.h() > 20:# 在屏幕上框出矩形img.draw_rectangle(r.rect(), color = (255, 0, 0), scale = 4)# 获取矩形角点位置corner = r.corners()# 在屏幕上圈出矩形角点img.draw_circle(corner[0][0], corner[0][1], 5, color = (0, 0, 255), thickness = 2, fill = False)img.draw_circle(corner[1][0], corner[1][1], 5, color = (0, 0, 255), thickness = 2, fill = False)img.draw_circle(corner[2][0], corner[2][1], 5, color = (0, 0, 255), thickness = 2, fill = False)img.draw_circle(corner[3][0], corner[3][1], 5, color = (0, 0, 255), thickness = 2, fill = False)# 角点坐标打印详见OpenART mini识别矩形框以及对应角点文件# -----跟踪激光部分-----# 设置激光颜色阈值red_td = [(56, 100, 45, 127, -128, 127)]# 根据阈值找到色块for b in img.find_blobs(red_td,pixels_threshold=2, area_threshold=15, merge=True,invert = 0):# 在屏幕上画出色块img.draw_rectangle(b.rect(), color = (0, 255, 0), scale = 2, thickness = 2)break# 坐标打印详见OpenART mini跟踪激光灯文件# 显示到屏幕上,此部分会降低帧率#lcd.show_image(img, 160, 120, 0, 0, zoom=0) #屏幕显示# 打印帧率print(clock.fps())相关文章:
OpenART mini的代码移植到OpenMV)
2023年电赛---运动目标控制与自动追踪系统(E题)OpenART mini的代码移植到OpenMV
前言 (1)已经有不少同学根据我上一篇博客完成了前三问,恭喜恭喜。有很多同学卡在了第四问。 (2)我说了OpenART mini的代码是可行的。但是他们不会移植到OpenMV上,再次我讲移植之后的代码贴出来。 ÿ…...

SAP CAP篇十二:AppRouter 深入研究
本文目录 本系列文章理解现有程序app文件夹中的package.json理解approuter.js 修改现有程序修改package.json新建index.js在Approuter中显示额外的逻辑 添加一些额外的Logger对应代码及branch 本系列文章 SAP CAP篇一: 快速创建一个Service,基于Java的实现 SAP CAP…...
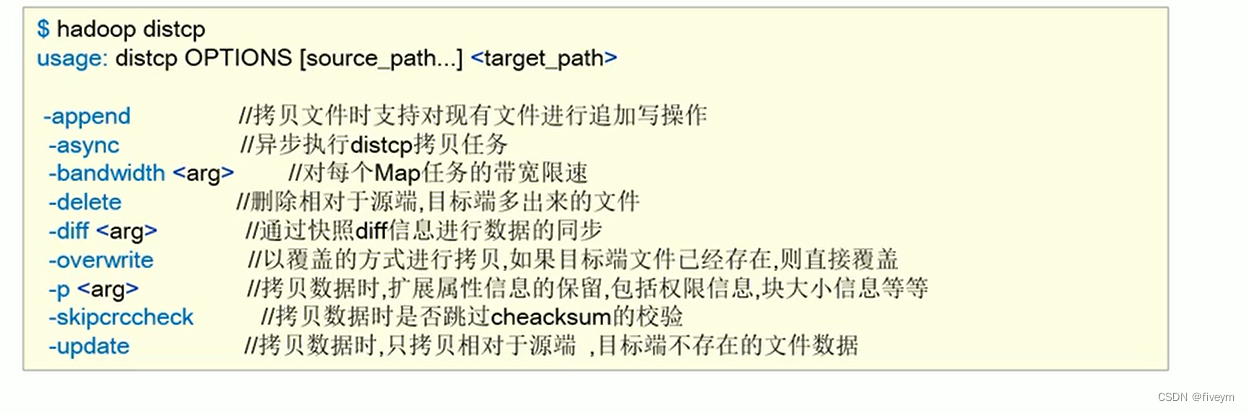
HDFS中数据迁移的使用场景和考量因素
HDFS中数据迁移的使用场景和考量因素 数据迁移使用场景数据迁移要素考量HDFS分布式拷贝工具-DistCpdistcp的优势性能命令 数据迁移使用场景 冷热集群数据同步、分类存储集群数据整体搬迁 当公司业务迅速的发展,导致的当前的服务器数量资源出现临时紧张的时候&#…...

科普 | 以太坊坎昆升级是什么
坎昆升级是什么 坎昆,是墨西哥一个著名的旅游城市,也是 Devcon 3 大会的举办地,按照以太坊升级命名的规律,以地名命名的升级,是针对以太坊执行层的升级。 之前同样命名的还有柏林升级、伦敦升级和这次的上海升级等。…...

C# 一些知识整理
C#反射和特性 反射Reflection Type 类型 Name NameSpace Assembly GetFields() GetProperties() GetMethods() 特性Attribute Obsolete弃用 Condit…...
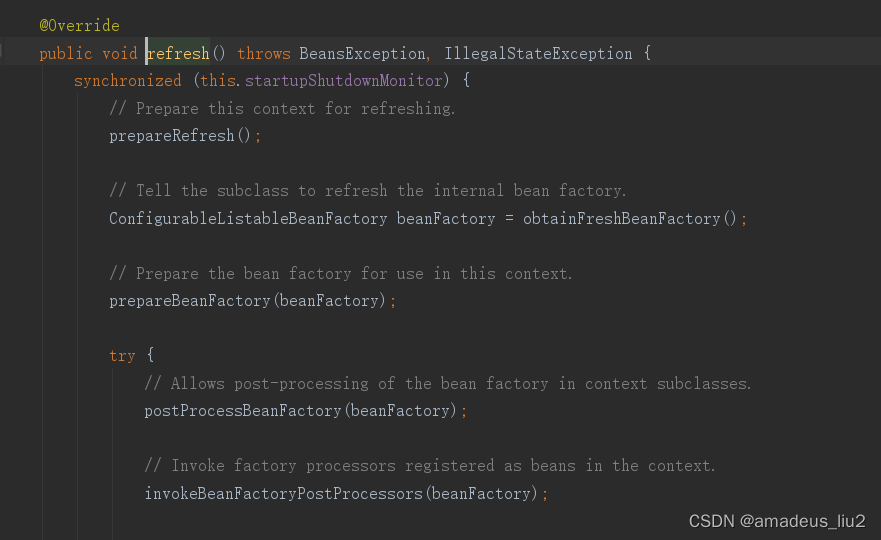
SpringBoot复习:(15)Spring容器的核心方法refresh是在哪里被调用的?
在SpringApplication的run方法: refreshContext代码如下: 其中调用的refresh方法代码如下: 其中调用的refresh方法代码如下: 其中调用的fresh方法代码如下: 其中调用了super.refresh();而这个super.refresh()就是…...
Android安卓实战项目(5)---完整的健身APP基于安卓(源码在文末)可用于比赛项目或者作业参考中
Android安卓实战项目(5)—完整的健身APP(源码在文末🐕🐕🐕)可用于比赛项目 一.项目运行介绍 1.大致浏览 【bilibili视频】 https://www.bilibili.com/video/BV1uX4y177iR/? (1&…...
11.2-存储处理与Block)
AutoSAR系列讲解(实践篇)11.2-存储处理与Block
目录 一、NVRAM Block NVRAM Block的类型 二、Fee Block 三、Ea Block 四、总结 同通信的PDU一样,存储功能也需要一些特殊的数据结构来存放和管理我们的NV数据(NV data) 一、NVRAM Block NVRAM Block的作用类似于IPDU,但它们两仅仅只是作用上相似,其功能实现是完全…...
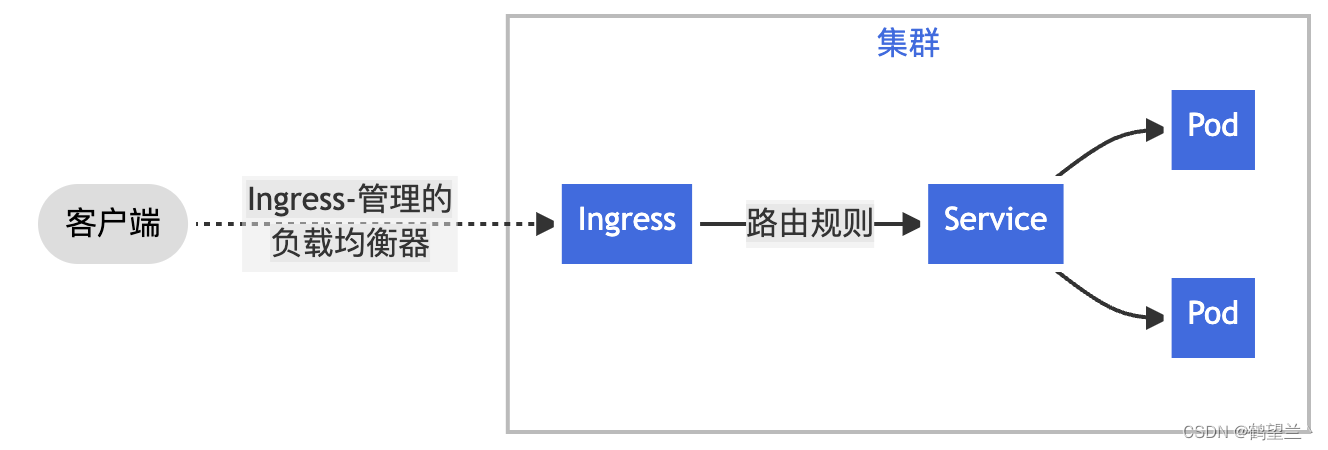
K8s总结
K8s 是什么 Kubernetes是一个开源的,用于管理云平台中多个主机上的容器化的应用,Kubernetes的目标是让部署容器化的应用简单并且高效(powerful),Kubernetes提供了应用部署,规划,更新,维护的机制…...
3.playbook剧本二
文章目录 playbook二Roles模块roles模式安装LNMP创建nginxfiles目录handlers目录tasks目录templates目录vars目录 创建mysqltasks目录 创建phpfiles目录handlers目录tasks目录templates目录vars目录 创建LNMP剧本文件 playbook二 Roles模块 角色的作用:把playbook…...

【MySQL】视图与用户管理
【MySQL】视图 视图视图概念使用基表与视图的相互影响 用户管理新增用户删除修改密码 用户权限授予权限回收权限 视图 视图概念 视图就是一张虚拟表,其内容由查询定义。与真实的表一样,视图包含一系列带有名称的列和行数据。视图的数据变化影响到基表&…...

LINUX系统监控工具ATOP的使用
最近在排查嵌入式系统的问题,需要监控各种系统资源的消耗。 ATOP不错,可以实时看,也可以保存成日志,分析历史情况。 直接使用: atop 想写入文件就是: sudo atop -a -w /home/guo/atoplog2.log 2 2的意…...
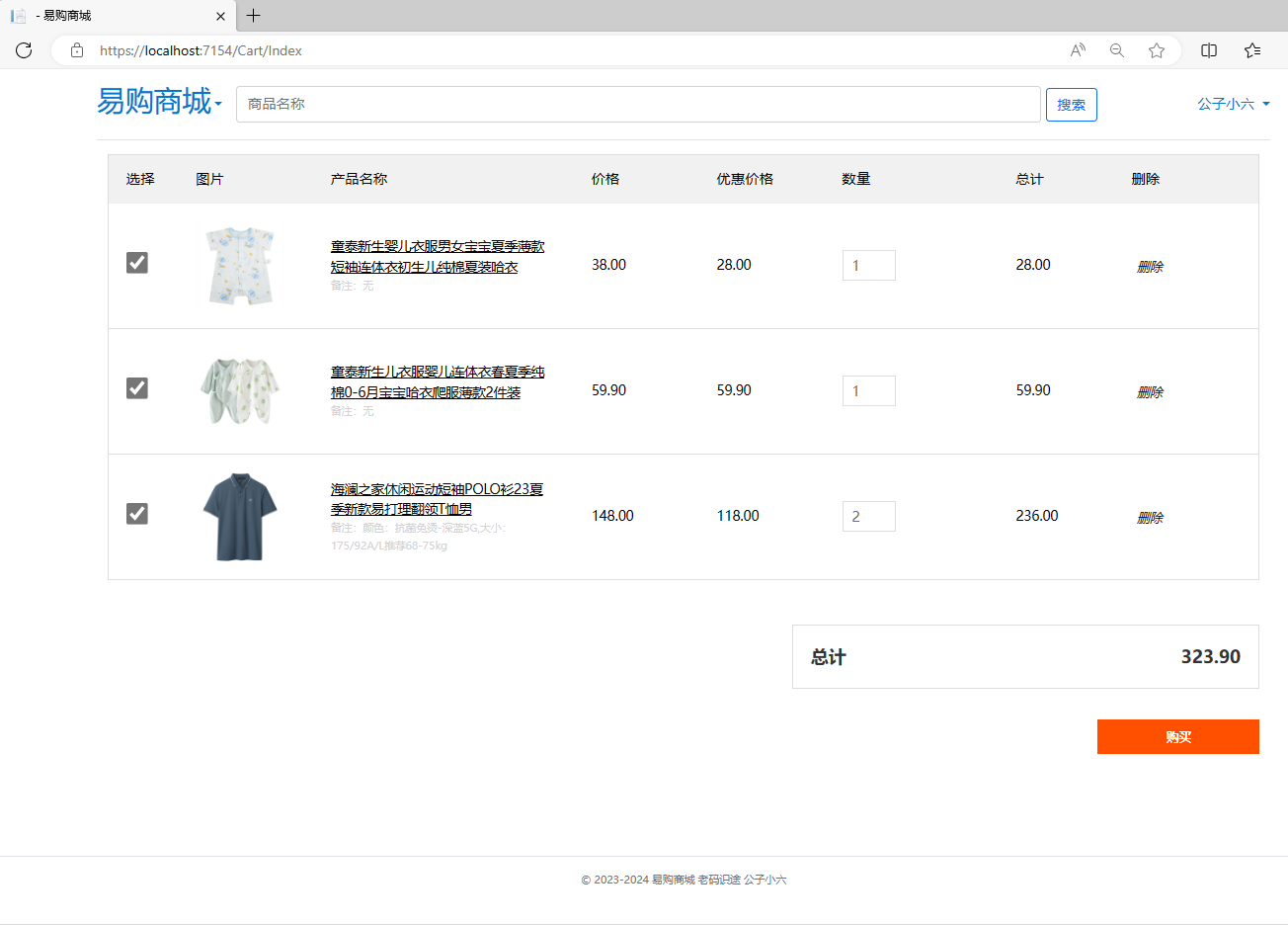
[回馈]ASP.NET Core MVC开发实战之商城系统(五)
经过一段时间的准备,新的一期【ASP.NET Core MVC开发实战之商城系统】已经开始,在之前的文章中,讲解了商城系统的整体功能设计,页面布局设计,环境搭建,系统配置,及首页【商品类型,ba…...

iPhone 8透明屏的透明度高吗?
iPhone 8是苹果公司于2017年推出的一款智能手机,它采用了全新的设计和技术,其中一个亮点就是透明屏。 透明屏是指屏幕具有透明度,可以透过屏幕看到背后的物体。 iPhone 8的透明屏采用了最新的OLED技术,这种技术可以实现更高的对比…...
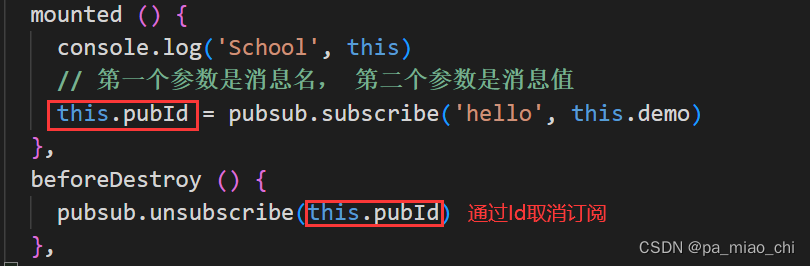
Vue2 第十五节 组件间通信方式
1.组件的自定义事件 2.全局事件总线 3.消息订阅与发布 一.组件的自定义事件 1.1 绑定自定义事件 ① 自定义事件就是一种组件间通信方式,用于子组件和父组件之间传递数据 ② props来实现子组件给父组件传递数据 (1)先给父组件中绑定一个…...
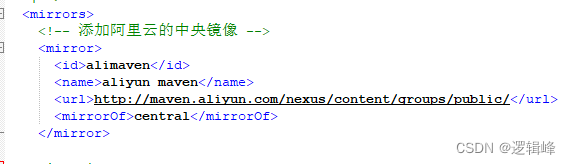
maven的下载与安装
文章目录 1 官网下载地址2 设置环境变量3 设置仓库地址4 添加阿里云的中央镜像 1 官网下载地址 https://maven.apache.org/ 下载 2 设置环境变量 MAVEN_HOME PATH mvn -v验证 3 设置仓库地址 仓库地址 4 添加阿里云的中央镜像 阿里云中央镜像...

BroadcastChannel 实现浏览器tab无刷新通讯
前提须知 使用 BroadcastChannel 来实现浏览器tab通讯必须是同源的BroadcastChannel 支持多tab间通讯mdn 链接 具体使用 发送方使用 <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><meta name"viewpor…...

98. Python基础教程:try...except...finally语句
【目录】 文章目录 1. try...except...finally语法介绍2. try...except...finally执行顺序3. 捕获特定类型的异常4. 捕获所有类型的异常5. 实操练习-打开txt文件并输出文件内容 【正文】 在今天的课程中,我们将学习Python中的异常处理语句try...except...finally。 …...

c语言实现简单的tcp客户端
功能:实现一个简单的tcp客户端,连接本地端口8888的tcp服务端,并发送一条报文。 /* * File: main.c* Author: vincent** Created on 2023年8月3日, 上午9:56*/#include <stdio.h> #include <stdlib.h> #include <string.h…...

RocketMQ详解及注意事项
RocketMQ是阿里巴巴开源的一款分布式消息中间件,具有高吞吐量、高可用性、可扩展性和稳定性强等特点,广泛应用于异步消息、应用解耦、流量削峰填谷等场景。本文将详细介绍RocketMQ的基本架构、工作流程、消息模型,并列出在使用RocketMQ时需要…...

保姆级教程:用iSYSTEM winIDEA和iC5000给S32K148烧录程序,附完整配置流程
从零掌握iSYSTEM工具链:S32K148开发板烧录与调试全流程实战第一次接触iSYSTEM的winIDEA和iC5000仿真器时,很多嵌入式开发者都会感到无从下手。不同于常见的开源工具链,这套专业级开发环境在汽车电子和工业控制领域有着广泛应用,尤…...

Godot中型项目工程化实践:目录规范、资源引用与状态管理
1. 这不是续集,而是项目落地的分水岭“Godot 游戏引擎项目(二)”——看到这个标题,很多人第一反应是:“哦,上一篇讲了环境搭建和Hello World,这篇该讲节点树和信号了?”但我在带三个…...

告别浪费!SolidWorks企业级共享方案,实现降本增效全攻略
还在为 SolidWorks 高昂的硬件投入和混乱的图纸管理头疼?告别“一人一机”的浪费模式,企业级共享方案才是降本增效的正解。这套攻略基于“1 台高性能服务器 云飞云共享云桌面”架构,帮你把硬件成本砍掉 60%,把软件利用率翻倍。一…...

智能体所有权与版权:AI Agent Harness Engineering 创造的作品归谁所有?
1. 标题选项 《AI Agent创作版权迷局破解:从Harness工程原理到所有权划分的完整指南》 《智能体作品归谁?AI Agent Harness Engineering场景下的版权规则深度拆解》 《告别权属纠纷:一文搞懂AI Agent生成内容的所有权、版权与收益分配规则》 《Harness工程视角下的AI创作权:…...

GEO生成引擎优化:当AI成为信息分发的主角,品牌如何抢占对话窗口?
当用户不再"搜索-浏览",而是直接"AI提问-获取答案",传统SEO的逻辑正在被彻底改写。2026年,GEO(Generative Engine Optimization,生成式引擎优化)已经从概念走向规模化落地。本文从技术…...

告别枯燥理论!用Unity脚本生命周期与预制体玩转一个“会变身的敌人”
用Unity打造会变身的敌人:脚本生命周期与预制体的实战应用在游戏开发中,敌人AI的行为设计往往是新手开发者最感兴趣也最容易感到困惑的部分。Unity的脚本生命周期和预制体系统为这类需求提供了强大支持,但教科书式的讲解常常让学习者陷入枯燥…...

如何用免费工具解锁QQ音乐、网易云音乐等加密格式:3分钟解决音乐播放限制
如何用免费工具解锁QQ音乐、网易云音乐等加密格式:3分钟解决音乐播放限制 【免费下载链接】unlock-music 在浏览器中解锁加密的音乐文件。原仓库: 1. https://github.com/unlock-music/unlock-music ;2. https://git.unlock-music.dev/um/web…...

WarcraftHelper:让经典魔兽争霸3完美适配现代电脑的终极解决方案
WarcraftHelper:让经典魔兽争霸3完美适配现代电脑的终极解决方案 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为魔兽争霸3在现代操…...

基于ESP8266与RGBDigit的Wi-Fi网络时钟:硬件设计、物联网集成与DIY实践
1. 项目概述:一个能感知环境的网络时钟如果你和我一样,对复古又带点科技感的显示设备没有抵抗力,同时又是个喜欢动手折腾的极客,那么这个项目绝对能让你在工作室或家里多一个既实用又炫酷的玩意儿。我说的就是这款基于RGBDigit数码…...

鼎讯AM-601光纤熔接机:交通通信建设与维护的可靠伙伴
在铁路、高速公路等交通基础设施的智能化建设中,稳定高效的光纤网络是指挥调度、安全监控等核心系统运行的生命线。鼎讯AM-601光纤熔接机,作为一款专为严苛环境设计的六马达便携式熔接设备,正成为保障这些关键通信链路畅通无阻的可靠选择。无…...