2023 电赛E题--可能会出现的问题以及解决方法
2023年电赛E题报告模板(K210版)--可直接使用
本文链接:2023年电赛E题报告模板(K210版)--可直接使用_皓悦编程记的博客-CSDN博客
解决激光笔在黑色区域无法识别
本文链接:
2023 电赛 E 题 激光笔识别有误--使用K210/Openmv/树莓派/Jetson nano实现激光笔在黑色区域的目标检测_牧子川的博客-CSDN博客
问题:第二题测量的pwm误差跟舵机跑起来不一样是什么原因啊
解决方法:动态补偿
问题:激光在黑胶带上就识别不出来
解决方法:查看该链接有方法
2023 电赛 E 题 激光笔识别有误--使用K210/Openmv/树莓派/Jetson nano实现激光笔在黑色区域的目标检测_牧子川的博客-CSDN博客
就这种现象 现在三种解决方案可以尝试,
第一种就是把曝光调到极致,这样其他地方都是黑的,方便识别;
第二种就是用浅色广告布,不要用黑胶带;
第三种就是直接用深度学习自己训练
第三种我觉得就是这个题的考点
问题:我的显示没有点定义distance_cm、H_FOV这两个值,要怎么解决?
解决:根据代码自查
import sensor, image, math, pyb
# 初始化相机
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(time=2000)
# 设置阈值,用于颜色分割
black_threshold = (0, 45, -30, 40, -30, 30) # 根据实际情况调整阈值
# 舵机参数
servo_pan_pin = 1 # 舵机1的引脚编号
servo_tilt_pin = 2 # 舵机2的引脚编号
servo_pan = pyb.Servo(servo_pan_pin) # 初始化舵机1
servo_tilt = pyb.Servo(servo_tilt_pin) # 初始化舵机2
servo_speed = 50 # 舵机转动速度(0-100,越大越快)
servo_pan_range = (0, 180) # 舵机1转动范围(角度)
servo_tilt_range = (0, 180) # 舵机2转动范围(角度)
# 控制舵机沿着矩形框移动一圈,并回到中心点
for angle in range(servo_pan_range[0], servo_pan_range[1], servo_speed):
servo_pan.angle(angle) # 控制舵机1水平旋转
servo_tilt.angle(angle) # 控制舵机2垂直旋转
pyb.delay(100) # 延时一段时间,控制舵机转动速度
# 将舵机回到中心点
servo_pan.angle((servo_pan_range[0] + servo_pan_range[1]) // 2)
servo_tilt.angle((servo_tilt_range[0] + servo_tilt_range[1]) // 2)
# 寻找矩形函数,返回第二大的矩形区域
def find_second_largest_rectangle(blobs):
max_area = 0
max_blob = None
second_max_area = 0
second_max_blob = None
for blob in blobs:
area = blob.area()
if area > max_area:
second_max_area = max_area
second_max_blob = max_blob
max_area = area
max_blob = blob
elif area > second_max_area:
second_max_area = area
second_max_blob = blob
return second_max_blob
while True:
img = sensor.snapshot().lens_corr(1.8) # 获取图像
blobs = img.find_blobs([black_threshold], pixels_threshold=200, area_threshold=200)
if blobs:
# 寻找第二大的矩形区域
second_max_blob = find_second_largest_rectangle(blobs)
if second_max_blob:
img.draw_rectangle(second_max_blob.rect(), color=(255, 0, 0), thickness=4) # 绘制第二大的矩形框,颜色为红色
# 获取矩形框的中心点坐标
x, y = second_max_![]() blob.cx(), second_max_
blob.cx(), second_max_![]() blob.cy()
blob.cy()
# 计算矩形框的长度和宽度(单位:厘米)
width_cm = 2 * distance_cm * math.tan(math.radians(H_FOV / 2)) * (second_max_blob.w() / img.width())
问题:openmv能 不用pid直接从中心坐标跑到矩形的一个顶点吗
解决:不能
问题:arduino接收到原点坐标如何控制激光笔移动到原点啊,思路是什么啊?
解决:把舵机移动范围划分出来,每一格代表多少 然后移动
问题:用arduino实现与openmv的通信
解决:
OpenMV上的代码(Python):
```python
import sensor, image, time, pyb
# 初始化串口
uart = pyb.UART(3, 9600)
while(True):
# 拍摄图像
img = sensor.snapshot()
# 在图像上绘制一个矩形
img.draw_rectangle(50, 50, 100, 100)
# 将图像转换为灰度图像
img_gray = img.to_grayscale()
# 计算矩形区域的平均亮度
avg_brightness = img_gray.get_statistics().mean()
# 将平均亮度值发送到Arduino
uart.write(str(avg_brightness) + '\n')
# 延迟一段时间
time.sleep(100)
```
在Arduino上的代码(C/C++):
```cpp
void setup() {
// 初始化串口
Serial.begin(9600);
}
void loop() {
if (Serial.available()) {
// 读取串口数据
String data = Serial.readStringUntil('\n');
// 将字符串转换为浮点数
float brightness = data.toFloat();
// 打印接收到的亮度值
Serial.print("Received brightness: ");
Serial.println(brightness);
// 延迟一段时间
delay(100);
}
}
OpenMV通过串口将图像的平均亮度值发送到Arduino,然后Arduino接收并打印接收到的亮度
问题:open mvF7PLUS能不能使用pwm
解决:不能
问题:为啥我链接上openmv 就变成变成一个角度,之后就不动了
解决:首先要能单独控制舵机 旋转任意角度
jetson(1404551917) 2023/8/3 17:21:16
import time
import machine
# 配置舵机引脚和PWM
pwm_pin = machine.Pin("P7", machine.Pin.OUT)
pwm = machine.PWM(pwm_pin, freq=50) # 使用50Hz的频率
# 设置舵机的转动范围(可以根据舵机型号进行调整)
min_duty = 30 # 最小占空比,对应最小角度
max_duty = 130 # 最大占空比,对应最大角度
# 控制舵机转动到指定角度
def set_servo_angle(angle):
# 将角度转换为对应的占空比
duty = min_duty + (max_duty - min_duty) * angle / 180.0
pwm.duty(int(duty))
# 示例:让舵机在0°和180°之间来回转动
while True:
for angle in range(0, 181, 10):
set_servo_angle(angle)
time.sleep(0.5)
for angle in range(180, -1, -10):
set_servo_angle(angle)
time.sleep(0.5)
使用PWM信号控制舵机的转动角度
问题:第四题的思路
解决:你要使用k210得到A4靶的旋转角度 ,摄像头检测A4靶纸的位置和角度信息。
将检测到的位置和角度信息与舵机的控制代码结合,使之执行相应的旋转动作
示例代码
import machine
import time
# 定义舵机控制引脚
servo_pin = machine.Pin(12, machine.Pin.OUT)
servo_pwm = machine.PWM(servo_pin)
# 定义旋转角度的范围
min_angle = 0
max_angle = 180
# 定义舵机旋转函数
def rotate_servo(angle):
duty_cycle = int((angle / 180) * 1023) # 转换为占空比
servo_pwm.duty(duty_cycle)
# 获取A4靶纸的旋转角度
def get_target_rotation():
# 使用相应的传感器或相机模块获取位置和角度信息
# 在这里假设已经获取到了旋转角度
rotation_angle = 90 # 假设旋转角度为90度
return rotation_angle
# 将A4靶纸以任意旋转角度贴在屏幕上,并启动运动目标控制系统
def run_target_control():
target_rotation = get_target_rotation()
if min_angle <= target_rotation <= max_angle:
rotate_servo(target_rotation)
time.sleep(1) # 等待舵机旋转到指定角度
# 在这里添加您的其他运动目标控制代码
else:
print("无效的旋转角度")
# 主循环
while True:
run_target_control()
问题:第四问,识别到坐标后,没有什么好的思路
解决:获取倾斜矩形框的位置和角度:使用OpenMV的图像处理功能,通过颜色识别或者边缘检测算法检测出倾斜的矩形框,并获取其位置和角度信息。 计算矩形框的中心点坐标:根据矩形框的位置信息,计算出矩形框的中心点坐标。可以通过矩形框的左上角和右下角坐标来计算中心点坐标。 计算激光笔需要移动的路径:根据矩形框的中心点坐标和角度,计算出激光笔需要移动的路径。具体的计算方式可以根据你的需求和实际情况来确定,以下是一种可能的计算方式: 假设激光笔的起始位置为(0, 0)。 根据矩形框的中心点坐标和角度,计算出激光笔需要移动的相对坐标。可以使用三角函数来计算相对坐标,例如使用正弦函数和余弦函数来计算横向和纵向的相对坐标。 将相对坐标转换为绝对坐标,即将相对坐标加上起始位置的坐标,得到激光笔需要移动的绝对坐标。 返回移动路径:将计算得到的移动路径返回,以便后续控制舵机移动。
相关文章:

2023 电赛E题--可能会出现的问题以及解决方法
2023年电赛E题报告模板(K210版)--可直接使用 本文链接:2023年电赛E题报告模板(K210版)--可直接使用_皓悦编程记的博客-CSDN博客 解决激光笔在黑色区域无法识别 本文链接: 2023 电赛 E 题 激光笔识别有误-…...
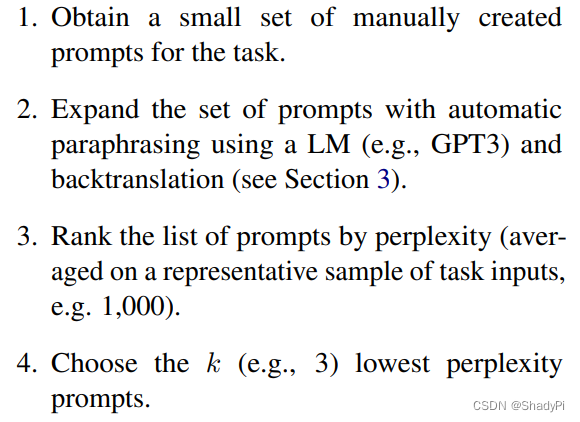
Demystifying Prompts in Language Models via Perplexity Estimation
Demystifying Prompts in Language Models via Perplexity Estimation 原文链接 Gonen H, Iyer S, Blevins T, et al. Demystifying prompts in language models via perplexity estimation[J]. arXiv preprint arXiv:2212.04037, 2022. 简单来说就是作者通过在不同LLM和不同…...

WEB集群——http、tomcat
1. 简述静态网页和动态网页的区别。 2. 简述 Webl.0 和 Web2.0 的区别。 3. 安装tomcat8,配置服务启动脚本,部署jpress应用。 1. 简述静态网页和动态网页的区别。 1)、静态网页 (1)、什么是静态网页 请求响应信息&…...

Socks5代理:网络安全与爬虫之利器
一、Socks5代理:简介与工作原理 Socks5代理,全称为Socket Secure 5代理,是一种允许用户通过代理服务器进行网络连接的技术。它是Socks协议的最新版本,在网络安全和数据传输方面有着显著的优势。 Socks5代理与其他代理的不同之处在…...

如何兼容低版本浏览器
如何兼容低版本浏览器 分为三个部分来说 HTML 低版本浏览器无法识别新增的HTML5元素,如果要兼容这部分浏览器,需要做以下处理: 对于非可替换元素,比如article、section、header、footer等,这种元素虽然低版本浏览器不识…...

【雕爷学编程】MicroPython动手做(39)——机器视觉之图像基础2
MixPY——让爱(AI)触手可及 MixPY布局 主控芯片:K210(64位双核带硬件FPU和卷积加速器的 RISC-V CPU) 显示屏:LCD_2.8寸 320*240分辨率,支持电阻触摸 摄像头:OV2640,200W像素 扬声器&#…...

gitlab搭建
回到目录 GitLab 是一个用于仓库管理系统的开源项目,使用 Git 作为代码管理工具,并在此基础上搭建起来的 Web 服务。 Gitlab 是被广泛使用的基于 git 的开源代码管理平台, 基于 Ruby on Rails 构建, 主要针对软件开发过程中产生的代码和文档进行管理,…...

JMeter 的使用
文章目录 1. JMeter下载2. JMeter的使用2.1 JMeter中文设置2.2 JMeter的使用2.2.1 创建线程组2.2.2 HTTP请求2.2.3 监听器 1. JMeter下载 官网地址 https://jmeter.apache.org/download_jmeter.cgi https://dlcdn.apache.org//jmeter/binaries/apache-jmeter-5.6.2.zip 下载解…...

Java语言 Iterator 如何装换成 List
迭代器如何逆向转换成List集合 在 Java 中,迭代器(Iterator)是一种用于遍历集合中元素的对象,它提供了一种简单而一致的方式来访问集合中的元素,而不需要暴露集合内部的结构。如果我们需要将一个迭代器逆向转换成 Lis…...
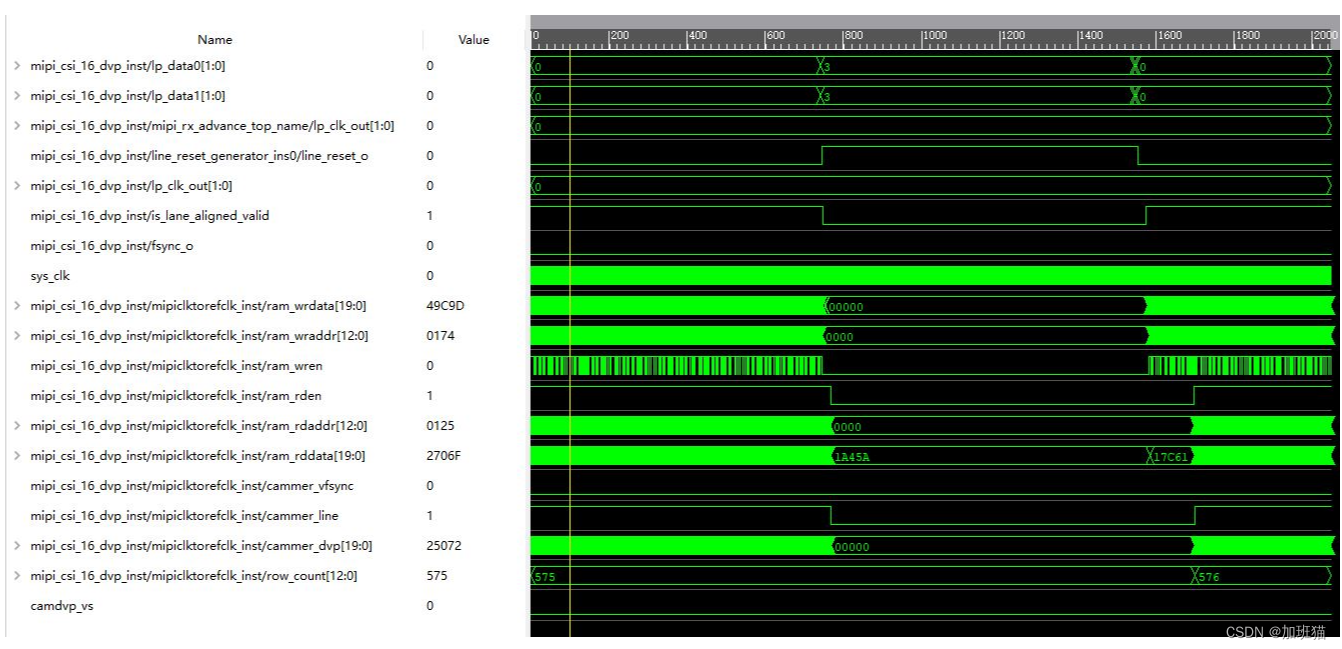
国产GOWIN实现低成本实现CSI MIPI转换DVP
CSI MIPI转换DVP,要么就是通用IC操作,如龙讯芯片和索尼芯片,但是复杂的寄存器控制器实在开发太累。对于FPGA操作,大部分都是用xilinx的方案,xilinx方案成本太高,IP复杂。 而用国产GOWIN已经实现了直接mipi …...
)
Typescript第六章 类型进阶(类型之间的关系,全面性检查,对象类型进阶,函数类型进阶,条件类型等)
文章目录 第六章 类型进阶6.1 类型之间的关系6.1.1 子类型和超类型6.1.2 型变结构和数组型变函数型变 6.1.3 可赋值性6.1.4 类型拓宽const类型多余属性检查 6.1.5 细化辨别并集类型 6.2 全面性检查6.3对象类型进阶6.3.1 对象类型的类型运算符“键入”运算符keyof运算符 6.3.2 R…...
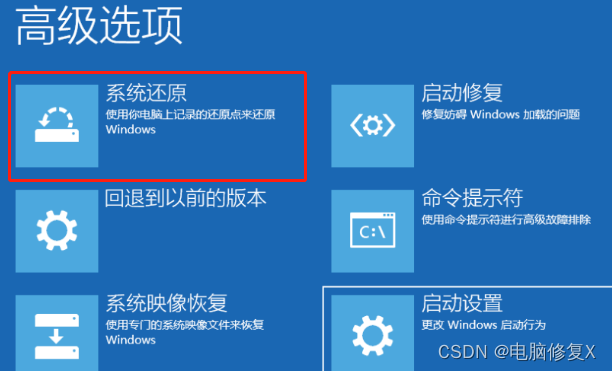
kernel32.dll如何修复,快速解决kernel32.dll缺失的方法
Kernel32.dll是Windows操作系统中一个重要的系统文件,对于系统的正常运行至关重要。然而,由于各种原因,用户可能会遇到kernel32.dll文件的缺失问题。今天小编就来给大家详细的介绍一下kernel32.dll这个文件,并且详细的介绍一下ker…...

初始化前端项目配置 eslint、prettier、husky 等等
每次新项目都要重新配置一遍,有点麻烦,记录一下。 一、配置 ESLint 1.1 核心配置 执行 npm init eslint/config 命令进行初始化,根据提示一路下一步即可,完成后会自动生成 eslintrc 文件并安装相关依赖。 1.2 React 编译模式配…...

嵌入式存储器为AI的实现提供了实现架构
近年来,大脑启发式计算机领域的研究活动获得了巨大的发展。主要原因是试图超越传统的冯诺依曼架构的局限性,后者越来越受存储器-逻辑通信的带宽和等待时间的局限性的影响。在神经形态架构中,内存是分布式的,可以与逻辑共定位。鉴于…...

iOS开发-格式化时间显示刚刚几分钟前几小时前等
iOS开发-格式化时间显示刚刚几分钟前几小时前等 在开发中经常遇到从服务端获取的时间戳,需要转换显示刚刚、几分钟前、几小时前、几天前、年月日等格式。 主要用到了NSCalendar、NSDateComponents这两个类 NSString *result nil;NSCalendarUnit components (NSC…...

ffmpeg视频音频命令
视频音频合并 视频音频合并,以视频时间为主,音频短了循环 方法1:混音,视频权重0,volume调节音量,aloop无限循环,duration:first为第一个素材的长度 ffmpeg -i video.mp4 -i audio.mp3 -filter_…...
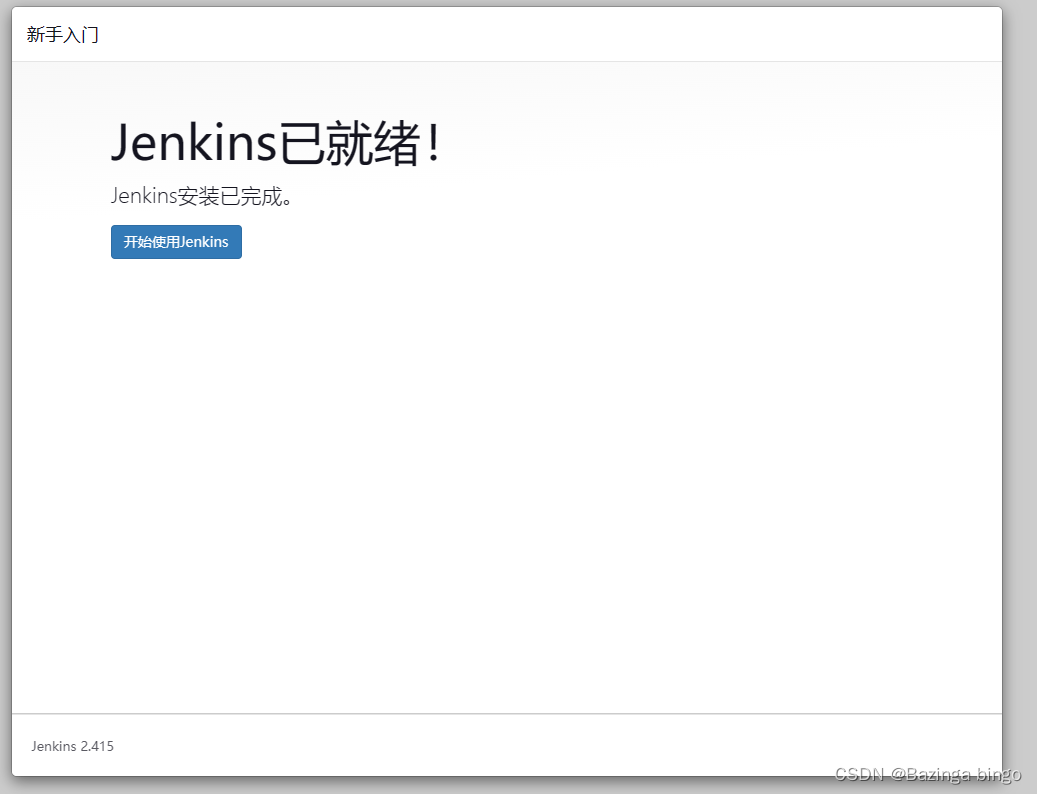
Jenkins工具系列 —— Jenkins 安装并启动
文章目录 安装涉及相关链接选择安装Jenkins版本安装JenkinsJenkins web页面启动卸载Jenkins 安装涉及相关链接 Jenkins官网: https://www.jenkins.io/zh/ Jenkins下载安装步骤: https://www.jenkins.io/zh/download/ 安装各种版本OpenJDK: h…...

使用中间人攻击的arp欺骗教程
文章目录 前言一、查看网络接口配置第 1 步:从受害者处获取 IP 配置第 2 步:在 Linux 中打开数据包转发第 3 步:使用 arpspoof 将包重定向到您的计算机步骤4:拦截来自路由器的包裹步骤5:从目标的浏览器历史记录中嗅探图…...
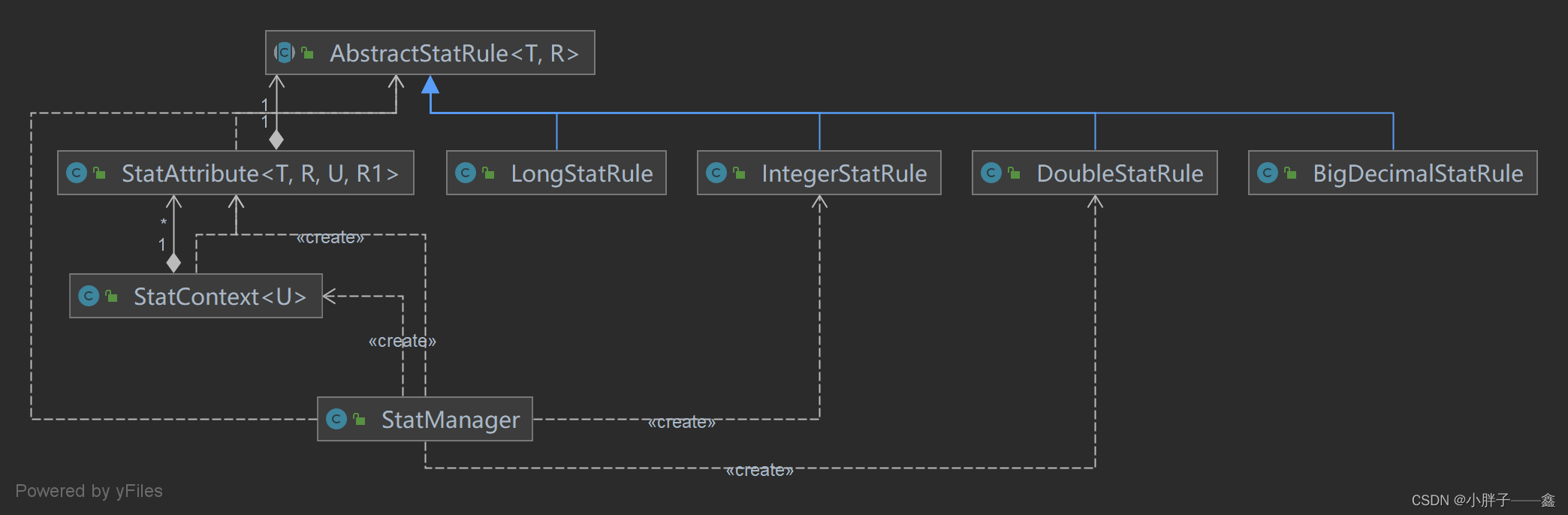
设计模式、Java8新特性实战 - List<T> 抽象统计组件
一、背景 在日常写代码的过程中,针对List集和,统计里面的某个属性,是经常的事情,针对List的某个属性的统计,我们目前大部分时候的代码都是这样写,每统计一个变量,就要定义一个值,且…...
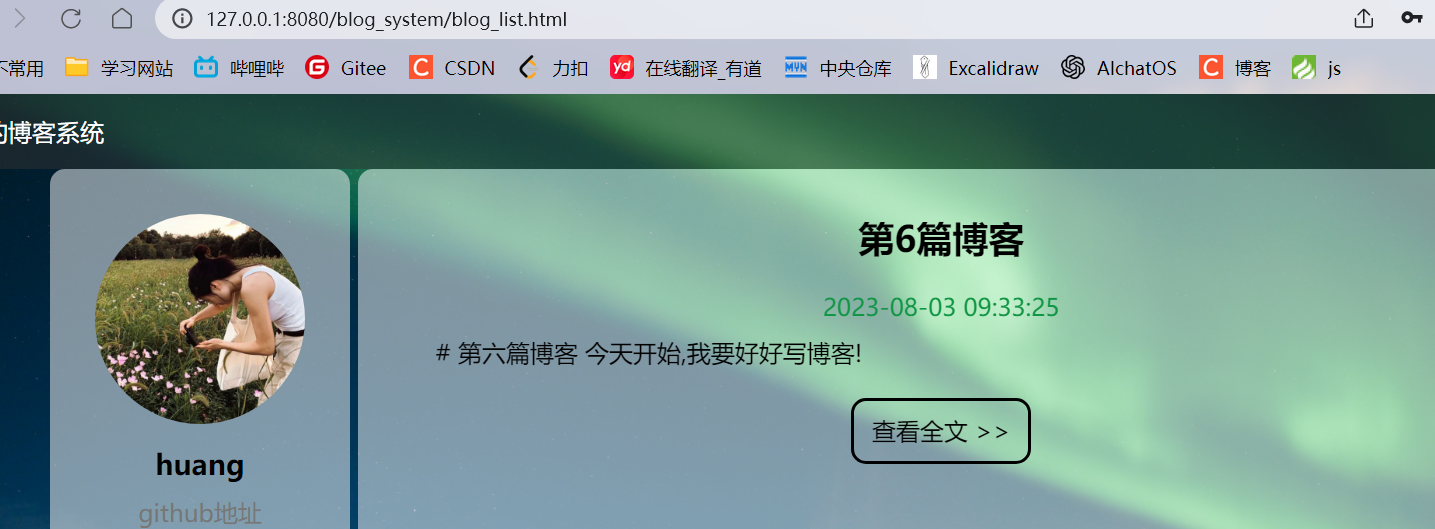
【JavaEE初阶】博客系统后端
文章目录 一. 创建项目 引入依赖二. 设计数据库三. 编写数据库代码四. 创建实体类五. 封装数据库的增删查改六. 具体功能书写1. 博客列表页2. 博客详情页3. 博客登录页4. 检测登录状态5. 实现显示用户信息的功能6. 退出登录状态7. 发布博客 一. 创建项目 引入依赖 创建blog_sy…...
)
Huggingface-CLI实战:从零搭建个人AI模型库(含国内镜像站配置)
Huggingface-CLI实战:从零搭建个人AI模型库(含国内镜像站配置) 当你第一次尝试下载某个热门AI模型时,是否经历过漫长的等待甚至中途失败?作为国内开发者,我们常常面临这样的困境。但很少有人告诉你…...

3.8B小模型大智慧:Phi-4-mini-reasoning数学推理服务SpringBoot一键部署
3.8B小模型大智慧:Phi-4-mini-reasoning数学推理服务SpringBoot一键部署 1. 为什么选择Phi-4-mini-reasoning? 在AI模型部署领域,我们常常面临一个两难选择:大模型效果虽好但资源消耗高,小模型轻量但能力有限。Phi-4…...

IDM激活脚本终极指南:一键实现永久免费使用的完整教程
IDM激活脚本终极指南:一键实现永久免费使用的完整教程 【免费下载链接】IDM-Activation-Script IDM Activation & Trail Reset Script 项目地址: https://gitcode.com/gh_mirrors/id/IDM-Activation-Script 想要免费使用Internet Download Manager&#…...

久坐危机:软件测试工程师的健康警报与破局之道
在数字化浪潮中,软件测试工程师作为产品质量的终极守门人,长期深陷“静态工作陷阱”。数据显示,测试从业者日均久坐时间高达9.2小时,引发三重健康危机:一、职业健康风险图谱肌肉骨骼系统颈椎反弓发生率68%(…...

AIAgent内容冷启动失败率下降86%的密钥:奇点大会闭门工作坊流出的「意图-结构-信噪比」三维校准法
第一章:AIAgent内容冷启动失败率下降86%的密钥:从现象到范式跃迁 2026奇点智能技术大会(https://ml-summit.org) 传统AIAgent冷启动阶段常因初始知识稀疏、意图建模失准与上下文锚定漂移,导致首周任务失败率高达73.5%。2025年Q2多家头部Agen…...

VsionPro经典PatMax_Demo.idb图片分析
VsionPro自带数据集,位置:C:\Program Files\Cognex\VisionPro\Images(默认位置)PatMax_Demo.idb 是 VisionPro 最经典的高精度几何模板匹配教学案例,用一个复杂机械零件直观展示 PatMax 在旋转、缩放、遮挡、光照变化下…...

STM32F030K6T6 定时器触发ADC采样的DMA传输实战
1. 为什么需要定时器触发ADC采样? 在嵌入式开发中,ADC(模数转换器)采样是获取模拟信号的关键环节。传统的手动触发或查询式ADC采样存在两个明显痛点:一是需要CPU频繁介入,二是采样间隔难以精确控制。比如用…...
|3种方法一步步教会你)
如何把PPT做成讲解视频(新手指南)|3种方法一步步教会你
很多人都有这样的需求:做课程讲解做培训视频做知识分享但卡在一个关键问题:👉 怎么把PPT变成“会讲解”的视频?注意,这里不是简单导出视频,而是:✅ 有讲解 ✅ 有节奏 ✅ 有字幕这篇文章…...

WeChatExporter:解锁iOS微信聊天记录的数字记忆宝库
WeChatExporter:解锁iOS微信聊天记录的数字记忆宝库 【免费下载链接】WeChatExporter 一个可以快速导出、查看你的微信聊天记录的工具 项目地址: https://gitcode.com/gh_mirrors/wec/WeChatExporter 你是否曾因误删微信对话而懊悔不已?是否担心手…...
)
AIAgent上下文管理失效全归因分析(LLM推理链断裂深度复盘)
第一章:AIAgent上下文管理失效的系统性认知框架 2026奇点智能技术大会(https://ml-summit.org) AI Agent在真实业务场景中频繁出现“遗忘用户前序意图”“混淆多轮对话实体”“跨任务上下文污染”等现象,其根源并非单一模块缺陷,而是上下文管…...