carla中lka实现(一)
前言:
对于之前项目中工作内容进行总结,使用Carla中的车辆进行lka算法调试,整体技术路线:
①在Carla中生成车辆,并在车辆上搭载camera,通过camera采集图像数据;
②使用图像处理lka算法,对于camera数据进行计算分析;
③对于分析的结果输出为偏移图像中心的线的距离,并以这个距离做为车辆控制方向盘的数值。
其中第一步比较简单,不做记录,从第二步,lka算法实现开始。
需要对于输入的图像进行边缘检测提取出车道线
一、边缘检测
车道线一般为黄线和白线,与车道线旁的公路的颜色有很大的差异,通过这种差异,就是车道线与公路之间颜色变化,可以找到车道线的边缘,找到这个边缘的过程为边缘检测。
1.1 使用sobel进行边缘检测
直接使用cv2中Sobel包来进行边缘检测:
测试源码如下:
def abs_sobel_thresh(image,orient='x',sobel_kernel=3,thresh=(0,255)):# generating the gray image.gray = cv2.cvtColor(image,cv2.COLOR_RGB2GRAY)# 计算x方向和y方向的梯度上强度值的图像if orient == 'x':abs_sobel = np.absolute(cv2.Sobel(gray,cv2.CV_64F,1,0,ksize=sobel_kernel))if orient == 'y':abs_sobel = np.absolute(cv2.Sobel(gray,cv2.CV_64F,0,1,ksize=sobel_kernel))# 利用归一化获得scaled_sobel = np.uint8(255*abs_sobel/np.max(abs_sobel))# 创建出一个同尺寸的数组grad_binary = np.zeros_like(scaled_sobel)grad_binary[ ( scaled_sobel >= thresh[0] ) & ( scaled_sobel <= thresh[1] ) ] = 1return grad_binary主要功能实现在abs_sobel_thresh函数中,
首先使用cv2.cvtColor函数将原始图像转化为灰度图,
然后计算x方向和y方向上的梯度强度值上的图像,
利用归一化获得一个数组,这个数组记录了图像中所有的点的强度值,然后新建一个同样size的图像数组,将数组中强度信息在0到255之间的值设置为1。
输出x和y方向梯度的图像对比:
ksize = 15gradx = abs_sobel_thresh(image,orient='x',sobel_kernel=ksize,thresh=(50,180))grady = abs_sobel_thresh(image,orient='y',sobel_kernel=ksize,thresh=(30,90))fig1 = plt.figure()plt.imshow(gradx,cmap="gray")fig2 = plt.figure()plt.imshow(grady,cmap="gray")plt.show()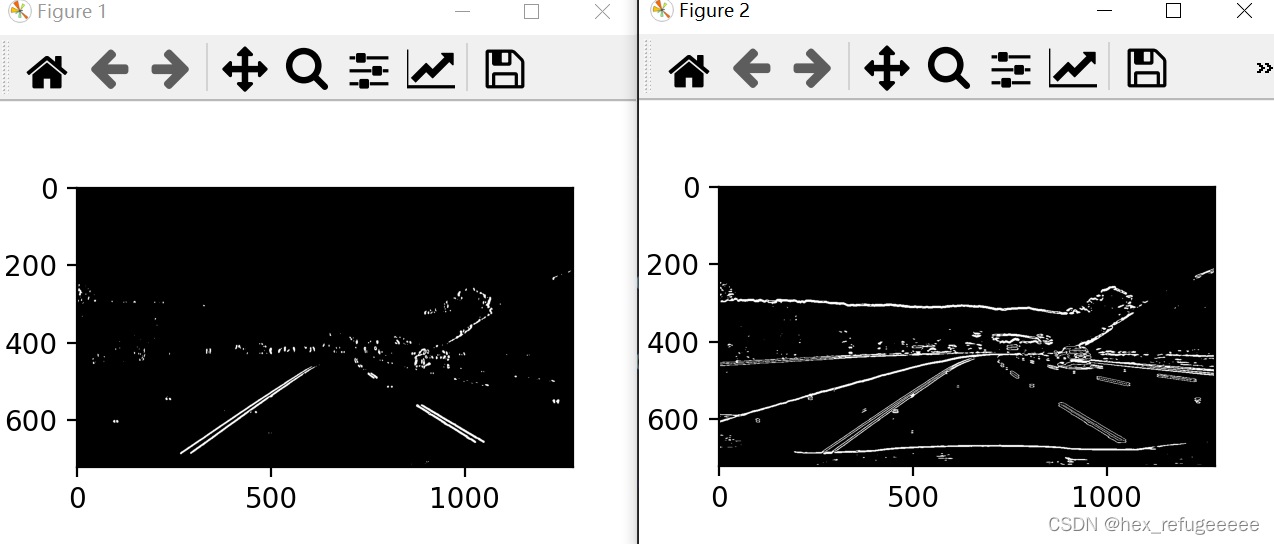
1.2 使用颜色阈值检测
使用图像中的rgb中不同数字进行检测提取。
def rgb_select(img,r_thresh,g_thresh,b_thresh):r_channel = img[:,:,0]g_channel = img[:,:,1]b_channel = img[:,:,2]r_binary = np.zeros_like(r_channel)r_binary[(r_channel > r_thresh[0]) & (r_channel <= r_thresh[1])] = 1g_binary = np.zeros_like(g_channel)g_binary[(g_channel > g_thresh[0]) & (g_channel <= g_thresh[1])] = 1b_binary = np.zeros_like(b_channel)b_binary[(b_channel > b_thresh[0]) & (b_channel <= b_thresh[1])] = 1#combined = np.zeros_like(r_channel)combined[((r_binary == 1) & (g_binary == 1) & (b_binary == 1))] = 1return combined在函数rbg_select中分别划分不同的rgb通道的数组,然后创建不同的新的数组,并将符合阈值内的点设置为1,最后将它们合并起来输出为图像combined。
1.3 融合sobel和rgb的边缘检测
就是将两个图像中值为1的合并起来,容易实现。
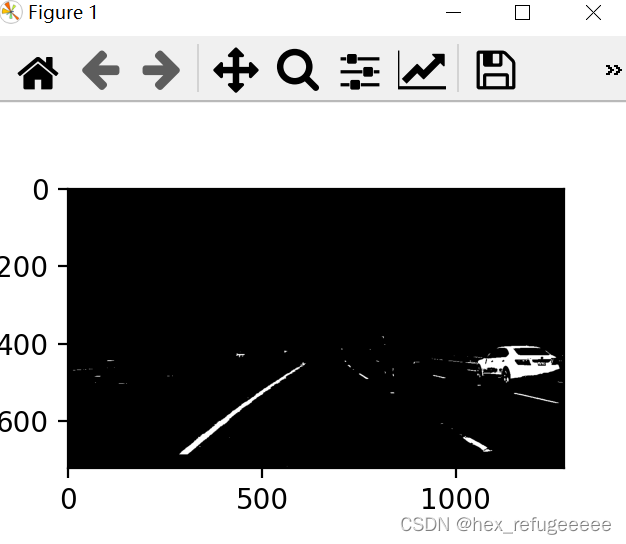
def color_gradient_threshold(image):ksize = 15gradx = abs_sobel_thresh(image,orient='x',sobel_kernel=ksize,thresh=(50,180))rgb_binary = rgb_select(image,r_thresh=(225,255),g_thresh=(180,255),b_thresh=(0,255))combined_binary = np.zeros_like(image)combined_binary[((gradx==1)|(rgb_binary==1))] = 255color_binary = combined_binaryreturn color_binary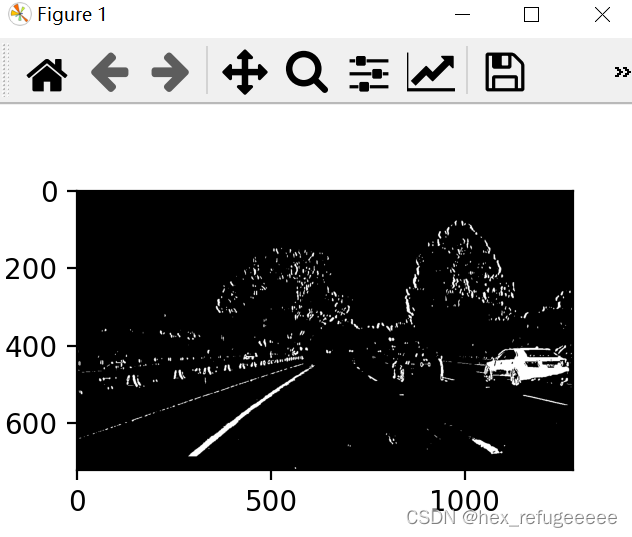
1.4 小结
边缘检测效果完成,因为是基于Carla做的车道线边缘检测,而Carla中输出的图像输出的效果比较理想,所以直接使用sobel和rgb边缘检测融合就可以达到很好的效果所以没有做过多的研究,实际情况比较复杂可能并不适用。
二、选择车道线的区域
这里要注意用数组表示图像的时候原点一般是左上角,向右为x轴正方向,向下为y轴正方向。
所以先选择出左下角,右下角:
ksize = 15img_color = color_gradient_threshold(image)left_bottom = [0, img_color.shape[0]]right_bottom = [img_color.shape[1],img_color.shape[0]]选择另外一个顶点:
apex = [ img_color.shape[1]/2, 420 ]vertices = np.array([ left_bottom, right_bottom, apex ],np.int32)其中vertices存储的是三个点,分别是左下角、右下角和顶点。
接下来使用刚刚选择的点与边缘检测后的图像按位与得到选择车道线的区域:
def region_of_interest(img,vertices):mask = np.zeros_like(img)cv2.fillPoly(mask,[vertices],[255,255,255])masked_image = cv2.bitwise_and(img,mask)return masked_image其中函数fillPoly函数第一个参数表示为原始图像,第二个参数为选择的点,第三个参数表示为赋值为白色。
而bitwise_and是将两个参数按位与。
最后输出按位与后的图像。

效果还可以。
三、投影变换
将原先小的三角形区域利用投影变换成大的区域。
主要运用cv中的透视变换:
def perspective_transform(image):# give 4 points as original coordinates.top_left =[590,460]top_right = [750,460]bottom_left = [330,650]bottom_right = [1130,650]# give 4 points to project.proj_top_left = [250,100]proj_top_right = [1150,100]proj_bottom_left = [330,650]proj_bottom_right = [1130,650]# to get image size.img_size = (image.shape[1],image.shape[0])# pts1 = np.float32([top_left,top_right,bottom_left,bottom_right])pts2 = np.float32([proj_top_left,proj_top_right,proj_bottom_left,proj_bottom_right])matrix_K = cv2.getPerspectiveTransform(pts1,pts2)img_k = cv2.warpPerspective(image,matrix_K,img_size)return img_k先划定四个点分别是左上、右上、左下和右下,为原始图像区域,
在划定投影区域。
运用函数getPerspectiveTransform它的第一个参数为平面1,第二个参数为平面2,求出平面1上的点要映射到平面2上所需要的变换的矩阵。
函数warpPerspective它的第一个参数为原始图像,第二个参数为投影变换矩阵,第三个参数为输出图像的大小,这里使用的就是原始图像的大小,需要注意一般为宽在前,长在后。
最后输出的就是变换后的图像信息。

四、车道线提取
4.1 直方图显示
使用直方图来显示前面拉伸后的图像信息。
def histogram_img(image):histogram_binary = np.zeros((image.shape[0],image.shape[1]),dtype=np.int)histogram_binary[image[:,:,0]>0] = 1histogram = np.sum(histogram_binary[:,:],axis=0)print("histogram: ",histogram)print("histogram shape: ",histogram.shape)return histogram 代码比较容易理解,设置一个同输入图像同尺寸的数组,将原来图像中任一rgb信息大于0的位置赋值为1,其实设置为255也可以,因为前面设置的就是255。之后就将它按列累加起来,返回这一行累加的数组(1*n)。

4.2 车道线定位
获得的前面的直方图后,求出它的两个波峰的位置来获得车道线的大概位置。
def lane_position(histogram):histogram_size = histogram.shapemiddle_point = int(histogram_size[0]/2)print("middle_point: ",middle_point)#left_point = [0,0]for i in range(middle_point):# 寻找直方图中的波峰即顶点if histogram[i] > left_point[1]:left_point[1] = histogram[i]left_point[0] = i#right_point = [0,0]for j in range(middle_point,histogram_size[0]):if histogram[j] > right_point[1]:right_point[1] = histogram[j]right_point[0] = jresult_points = [left_point,right_point] print("result_points: ",result_points)return result_points输出位置:
result_points: [[342, 566], [1014, 291]]
说明两个车道线大概在这两个点附近。
4.3 滑动窗口
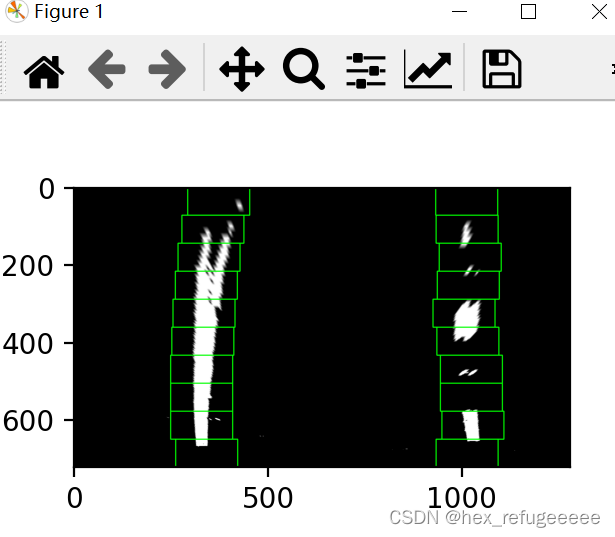
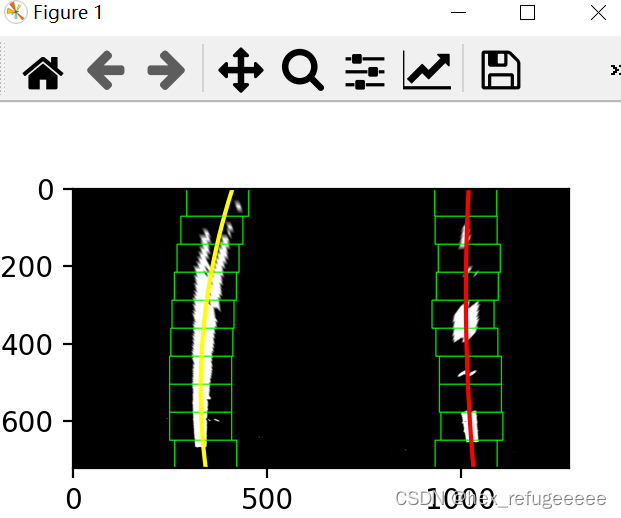
将前面求得的两个坐标为起点来构建滑动窗口将车道线包裹在内。
def sliding_window(image,lanes_pos):# starting original points for windows.left_x_current = lanes_pos[0][0]right_x_current = lanes_pos[1][0]nWindows = 10window_height = np.int(image.shape[0]//nWindows)window_width = 80# to get the non-zero data in the input image.nonzero = image.nonzero() nonzero_y = nonzero[0]nonzero_x = nonzero[1]## create a empty list to receive left/right line pixel.left_lane_inds = []right_lane_inds = []# create window by windowfor window in range(nWindows):# window size.win_y_top = image.shape[0] - (window +1)*window_heightwin_y_bottom = image.shape[0] - window*window_heightwin_x_left_left = left_x_current - window_widthwin_x_left_right = left_x_current + window_width win_x_right_left = right_x_current - window_widthwin_x_right_right = right_x_current + window_width# define a rectangle for left+right lane.# and add the rectangle to the input image.cv2.rectangle(image,(win_x_left_left,win_y_top),(win_x_left_right,win_y_bottom),(0,255,0),2)cv2.rectangle(image,(win_x_right_left,win_y_top),(win_x_right_right,win_y_bottom),(0,255,0),2)good_left_inds = ((nonzero_y >= win_y_top)&(nonzero_y < win_y_bottom)&(nonzero_x >= win_x_left_left)&(nonzero_x < win_x_left_right)).nonzero()[0]good_right_inds = ((nonzero_y >= win_y_top)&(nonzero_y < win_y_bottom)&(nonzero_x >= win_x_right_left)&(nonzero_x < win_x_right_right)).nonzero()[0]#print(good_left_inds)left_lane_inds.append(good_left_inds)right_lane_inds.append(good_right_inds)##print("nonzero_x_left:",nonzero_x[good_left_inds])#print("non_zero_x_right:",nonzero_x[good_right_inds])if len(good_left_inds)>50:left_x_current = np.int(np.mean(nonzero_x[good_left_inds]))if len(good_right_inds)>50:right_x_current = np.int(np.mean(nonzero_x[good_right_inds]))# ending of lop.#print("left_lane_inds",left_lane_inds)# to transfom a list of list to a list.left_lane_inds = np.concatenate(left_lane_inds)right_lane_inds = np.concatenate(right_lane_inds)#print("left_lane_inds",left_lane_inds)left_x = nonzero_x[left_lane_inds]left_y = nonzero_y[left_lane_inds]right_x = nonzero_x[right_lane_inds]right_y = nonzero_y[right_lane_inds]#results = [image,left_x,left_y,right_x,right_y]#print("sliding windows results: ",results)return results代码写的很明白,首先去输入的坐标为左边的车道线x坐标和右边车道线y坐标,
然后计算滑动窗口的高度和宽度,
算出图像中所有不唯1的坐标,将它们放入nonzero数组中,
分别取行数为nonzero_y和列数为nonzero_x,
之后就是在for循环不断的画出矩形,利用rectangle函数进行绘制图像。
然后计算这个窗口里面大于1的数的位置平均值为下一个窗口的中间值,
最后保存所有的大于1的坐标,并于图像一并返回。
4.4 曲线拟合
构建出一条曲线来表示车道线,方便之后利用曲线的曲率来控制车辆的转向信息。
具体实现为将之前获得的图像中所有的白色点的坐标,将它们进行拟合成曲线。
def fit_polynominal(img_sliding_window):image = img_sliding_window[0]left_x = img_sliding_window[1]left_y = img_sliding_window[2]right_x = img_sliding_window[3]right_y = img_sliding_window[4]left_fit = np.polyfit(left_y,left_x,2)right_fit = np.polyfit(right_y,right_x,2)# to generate x and y values for plotting.ploty = np.linspace(0,image.shape[0]-1,image.shape[0])left_fitx = left_fit[0]*ploty**2 + left_fit[1]*ploty + left_fit[2]right_fitx = right_fit[0]*ploty**2 + right_fit[1]*ploty + right_fit[2]plt.plot(left_fitx,ploty,color='yellow')plt.plot(right_fitx,ploty,color='red')return 0其中主要函数为polyfit函数它将参数一和参数二进行二次曲线拟合,拟合后得到三个参数存在返回值里面。
之后依据高度进行划分点,然后更具拟合后的参数构造曲线方程,最后输出到图像上。
4.5 添加蒙版
通过前面获得的两条曲线的坐标点,在两条曲线之间添加一层蒙版,表示车道位置。
def drawing_poly(img_ori, img_fit):# create an image to draw the lines on.#left_fitx = img_fit[0]right_fitx = img_fit[1]ploty = img_fit[2]#img_zero = np.zeros_like(img_ori)##print("left_fitx:",left_fitx)#print("ploty:",ploty)pts_left = np.transpose(np.vstack([left_fitx,ploty]))#print("pts_left:",pts_left)# print("pts_left shape:",pts_left.shape)pts_right = np.transpose(np.vstack([right_fitx,ploty]))pts_right = np.flipud(pts_right)#print("pts_right:",pts_right)#print("pts_right shape:",pts_right.shape)pts = np.vstack((pts_left,pts_right))#print("pts_left+right:",pts)#print("pts_left+right shape:",pts.shape)img_mask = cv2.fillPoly(img_zero,np.int_([pts]),(0,255,0))#print("img_mask:",img_mask)#print("img_mask shape:",img_mask.shape)return img_mask主要是对于右侧坐标的反转,
pts_right = np.flipud(pts_right)是为了后面绘制多边形的时候连线准确,
pts = np.vstack((pts_left,pts_right))
img_mask = cv2.fillPoly(img_zero,np.int_([pts]),(0,255,0))

4.6 反向映射
将之前的处理后的图像反向映射回原始图像。
将之前的代码中的参数变换位置就可以获得反过来的变换矩阵。
getPerspectiveTransform
def drawing_poly_perspective_back(img_ori, img_fit,matrix_K_back):# create an image to draw the lines on.#left_fitx = img_fit[0]right_fitx = img_fit[1]ploty = img_fit[2]#img_zero = np.zeros_like(img_ori)##print("left_fitx:",left_fitx)#print("ploty:",ploty)pts_left = np.transpose(np.vstack([left_fitx,ploty]))#print("pts_left:",pts_left)#print("pts_left shape:",pts_left.shape)pts_right = np.transpose(np.vstack([right_fitx,ploty]))pts_right = np.flipud(pts_right)#print("pts_right:",pts_right)#print("pts_right shape:",pts_right.shape)pts = np.vstack((pts_left,pts_right))#print("pts_left+right:",pts)#print("pts_left+right shape:",pts.shape)img_mask = cv2.fillPoly(img_zero,np.int_([pts]),(0,255,0))#print("img_mask:",img_mask)#print("img_mask shape:",img_mask.shape)# to get image size.img_size = (img_ori.shape[1],img_ori.shape[0])img_mask_back = cv2.warpPerspective(img_mask,matrix_K_back,img_size)return img_mask_back
五、视频输入
车道线检测变换基本完成,在将单帧图像修改为视频进行计算。
# video input.video_input = "./test_video/project_video.mp4"cap = cv2.VideoCapture(video_input)# output setting.video_output = "./test_video/project_video_output_v2.mp4"fourcc = cv2.VideoWriter_fourcc(*'mp4v')width = 1280height = 720fps = 20video_out = cv2.VideoWriter(video_output,fourcc,fps,(width,height))# add some text to the output video.content = "this is frame: "pos = (64,90)color = (0,255,0)font = cv2.FONT_HERSHEY_SIMPLEXweight = 2size = 1count = 0## prcessing frame by frame. while True:ret,frame = cap.read()if not ret:print("video read error, exited...")breakif cv2.waitKey(25) & 0xFF == ord('q'):print(" you quit the program by clicking 'q'...")breakimage = frameksize = 15img_color = color_gradient_threshold(image)#left_bottom = [0, img_color.shape[0]]right_bottom = [img_color.shape[1],img_color.shape[0]]apex = [ img_color.shape[1]/2, 420 ]vertices = np.array([ left_bottom, right_bottom, apex ],np.int32)img_interest = region_of_interest(img_color,vertices)img_perspective,matrix_K_back = perspective_transform(img_interest)img_histogram = histogram_img(img_perspective)lanes_pos = lane_position(img_histogram)img_sliding_window = sliding_window(img_perspective,lanes_pos) img_fit_list = fit_polynominal(img_sliding_window)## to set the transparency of img.img_mask_back = drawing_poly_perspective_back(image,img_fit_list,matrix_K_back)#img_mask_back_result = img_mask_back*0.5 + image*0.5img_mask_back_result = cv2.addWeighted(image,1,img_mask_back,0.3,0)results = img_mask_back_resultcontents = content + str(count)cv2.putText(results,contents,pos,font,size,color,weight,cv2.LINE_AA)cv2.imshow("frame",results)video_out.write(results)#count += 1cap.release()cv2.destroyAllWindows()容易理解,不做解读,
但只能达到一个简单的车道线识别效果,而且处理速度很慢,遇到颜色变化不明显的会直接error,在具体的项目应用中需要改进,改进在后面的文章中体现。
参考文章:
(六)高级车道线识别 - 知乎在之前的文章中,我们介绍了利用opencv进行简单的车道线识别项目,本文将更进一步,对相对复杂场景下的车道线进行识别。具体来讲,本文在简单车道线项目的基础上增加了如下知识点:颜色空间,透视变换,滑移窗,弯…![]() https://zhuanlan.zhihu.com/p/56712138实操:自动驾驶的车道识别原理及演练(附代码下载)大家五一快乐呀,我是李慢慢。前情提要距离上一次正儿八经发文,貌似已经过去两个月了,因为疫情原因我一直都是居家
https://zhuanlan.zhihu.com/p/56712138实操:自动驾驶的车道识别原理及演练(附代码下载)大家五一快乐呀,我是李慢慢。前情提要距离上一次正儿八经发文,貌似已经过去两个月了,因为疫情原因我一直都是居家https://mp.weixin.qq.com/s/9ykWyXsCnTVqyojRlb7H9A
相关文章:
carla中lka实现(一)
前言: 对于之前项目中工作内容进行总结,使用Carla中的车辆进行lka算法调试,整体技术路线: ①在Carla中生成车辆,并在车辆上搭载camera,通过camera采集图像数据; ②使用图像处理lka算法&#…...
常见的数据结构(顺序表、顺序表、链表、栈、队列、二叉树)
线性表(Linear List) 1.什么是线性表 2.线性表的特点 3.线性表的基本运算 顺序表 1.什么是顺序表 2.时间复杂度: 链表 1.什么是链表 2.单向链表 3. 双向链表 4.ArrayList和LinkedList的使用 栈Stack 1.什么是栈 2.栈的基本方法 队列…...
(12)理解委托,反射,Type,EvenInfo,插件, 组合枚举,BindingFlags,扩展方法及重载,XML认识
一、复习委托事件 1、委托复习。 private delegate int MyDelegate(int a, int b); //1.定义委托类型private static void Main(string[] args){MyDelegate md new MyDelegate(AddDelegate);//2.声明委托变量int result md(1, 2);//3.调用委托Console.WriteLine(result);Cons…...

软件建设方案技术方案实施方案密码评测方案等保测评方案人员培训方案项目建设与运行管理项目招标方案模板目录
第一章 项目概述 1.项目名称(包含项目全称和简称) 2.项目建设单位及负责人、项目责任人 3.项目建设依据 (1)政策依据(主要从国家、省、市、行业部门相关的政策文件要求等方面进行描述) (2)技术标准 4.项目建设目标、建设任务 5.项目主要建设内容、规模、建设周期…...
pytorch中torch.einsum函数的详细计算过程图解
第一次见到 rel_h torch.einsum(“bhwc,hkc->bhwk”, r_q, Rh)这行代码时,属实是懵了,网上找了很多博主的介绍,但都没有详细的说明函数内部的计算过程,看得我是一头雾水,只知道计算结果的维度是如何变化的…...
【iOS】App仿写--天气预报
文章目录 前言一、首页二、搜索界面三、添加界面四、浏览界面总结 前言 最近完成了暑假的最后一个任务——天气预报,特此记录博客总结。根据iPhone中天气App的功能大致可以将仿写的App分为四个界面——首页,搜索界面,添加界面,浏…...
快速远程桌面控制公司电脑远程办公
文章目录 第一步第二步第三步 远程办公的概念很早就被提出来,但似乎并没有多少项目普及落实到实际应用层面,至少在前几年,远程办公距离我们仍然很遥远。但2019年末突如其来的疫情,着实打了大家一个措手不及。尽管国内最初的大面积…...

亚信科技AntDB数据库专家出席数据库标准研讨会并参与研讨
2023年7月12日,全国信息技术标准化技术委员会数据库标准工作组(SAC/TC28/WG31)秘书处组织召开数据库标准研讨会,会议围绕数据库标准工作组2023年上半年开展的标准编制情况进行交流。亚信科技AntDB数据库相关专家出席会议ÿ…...

【我们一起60天准备考研算法面试(大全)-第三十四天 34/60】【前缀和】【北邮】
专注 效率 记忆 预习 笔记 复习 做题 欢迎观看我的博客,如有问题交流,欢迎评论区留言,一定尽快回复!(大家可以去看我的专栏,是所有文章的目录) 文章字体风格: 红色文字表示&#…...
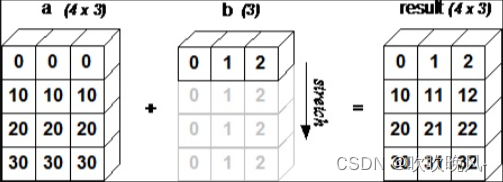
【数据分析】numpy (二)
numpy作为数据分析,深度学习常用的库,本篇博客我们来介绍numpy的一些进阶用法: 一,numpy的常用简单内置函数: 1.1求和: a np.array([[1, 2],[3, 4]]) np.sum(a)10 1.2求平均值: np.mean(a…...

Vue3小案例—v-model 双向数据绑定实现动态列表增加和删除
v-model双向绑定的原理: v-model 是Vue.js 提供的一个指令,用于实现双向数据绑定,它可以将表单元素的值与Vue实例的数据绑定在一起,当表单元素的值发生改变时,Vue实例的数据也会随之更新,反之亦然。 …...
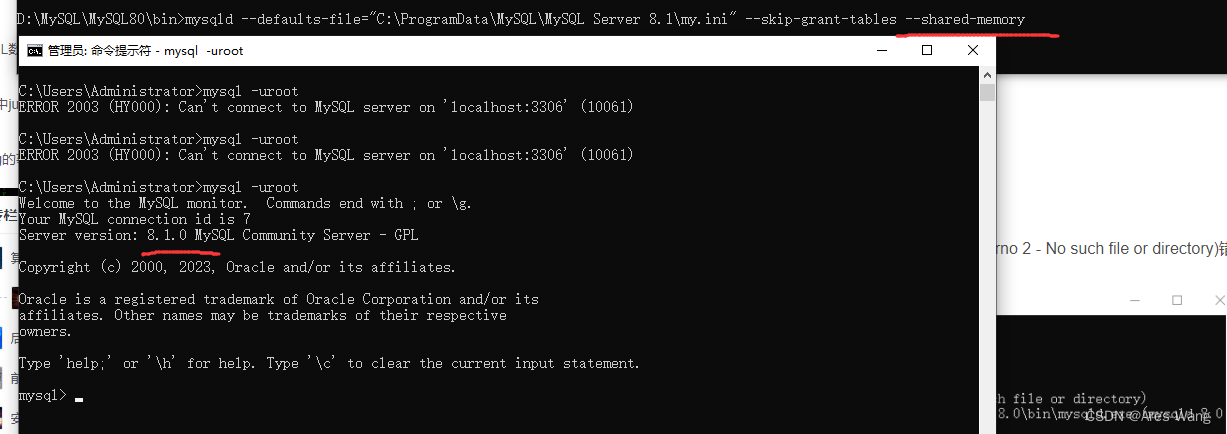
MySQL 重置root 密码
5.7 版本 首先要把服务mysql57 关闭 net stop MySQL57 在安装的mysql57的程序的bin中 运行cmd(管理员运行) mysqld --defaults-file‘mysql存放数据的位置\my.ini’ --skip-grant-tables 上图 错误 注意:如果遇到mysqld: Can’t change dir…...

OpenCV图像处理技巧之空间滤波
1. 引言 再次问好,图像处理爱好者们!🌟 在前面的章节中,我们学习了图像处理的基础知识,并展现了图像增强的魅力。在这一节中,我们将更深入地研究空间滤波技术。 闲话少说,我们直接开始吧&#…...
Java超级玛丽小游戏制作过程讲解 第一天 创建窗口
package com.sxt;import javax.swing.*; import java.awt.event.KeyEvent; import java.awt.event.KeyListener;public class MyFrame extends JFrame implements KeyListener {//设置窗口的大小为800*600public MyFrame() {this.setSize(800, 600);//设置窗口中显示this.setLo…...

【POP3/IMAP/SMTP】QQ邮箱设置
什么是 POP3/IMAP/SMTP 服务 POP3 (Post Office Protocol - Version 3)协议用于支持使用电子邮件客户端获取并删除在服务器上的电子邮件。 IMAP (Internet Message Access Protocol)协议用于支持使用电子邮件客户端交互式存取服务…...

云计算——常见集群策略
作者简介:一名云计算网络运维人员、每天分享网络与运维的技术与干货。 座右铭:低头赶路,敬事如仪 个人主页:网络豆的主页 目录 前言 一.什么是集群 二.集群策略 1.虚拟机HA 实现虚拟机高可用性通常涉及以下关键…...

c语言locale.h简介
<locale.h>提供的函数用于控制c标准库中对于不同的地区行为不一样的部分。(地区通常是国家或者某种特定语言的地理区域) 一、locale.h简单介绍 在标准库里,依赖地区的部分通常包括以下几项: 数字量的格式 货币的格式 字符…...
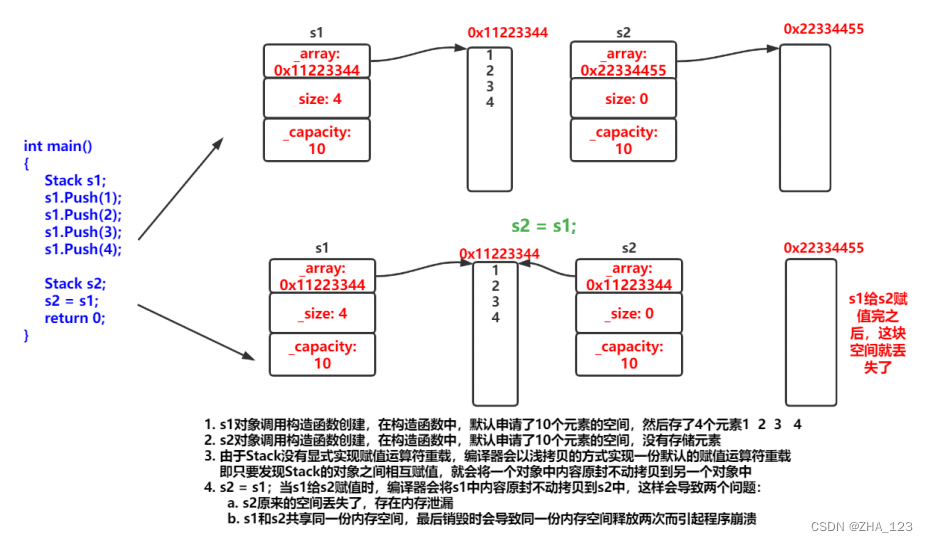
C++运算符重载详解(赋值、流插入流提取、前置后置++、取地址)
C运算符重载详解 基本介绍运算符重载案列1. 赋值运算符重载2. 前置和后置重载3. cout,cin(流插入,流提取重载)4. 取地址重载 基本介绍 C为了增强代码的可读性引入了运算符重载,运算符重载是具有特殊函数名的函数,也具有其 返回值…...

sql的count函数优化
sql的count(1)函数会执行遍历表统计符合条件的数目,下面有两个sql 第一条: select count(1) from membership_call_detail_statistics a where a.repository_id f2a4ed6b3e074e33bd99998c1def26f8 and a.statistics_date between 2023-04-01 00:00:0…...
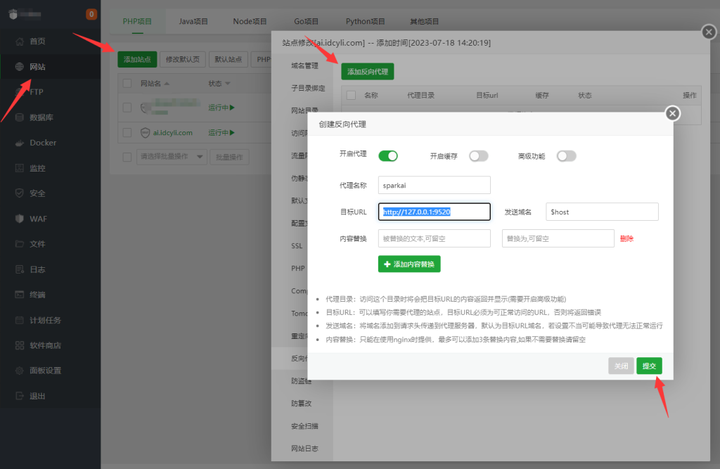
Ai创作系统ChatGPT源码搭建教程+附源码
系统使用Nestjs和Vue3框架技术,持续集成AI能力到本系统! 更新内容: 同步官方图片重新生成指令 同步官方 Vary 指令 单张图片对比加强 Vary(Strong) | Vary(Subtle) 同步官方 Zoom 指令 单张图片无限缩放 Zoom out 2x | Zoom out 1.5x 新增GP…...

台达A2/B2伺服电机编码器改功率软件那些事儿
台达A2/B2伺服电机编码器改功率软件 台达A2/B2伺服电机编码修改, 用于更换编码器写匹配电机参数,更改编码器功率匹配驱动器测试维修用在伺服电机的维修与测试领域,台达A2/B2系列是大家经常会打交道的“老朋友”。其中,编码器的参数…...

实战解析:基于Selenium与多线程的东方财富股吧数据采集方案
1. 为什么需要东方财富股吧数据采集 做量化分析的朋友都知道,市场情绪数据是alpha因子挖掘的重要来源。东方财富股吧作为国内活跃的股民社区,每天产生海量的讨论帖子和评论,这些数据对分析个股热度、投资者情绪变化具有重要价值。但手动收集这…...

DDD难落地?就让AI干吧! - cleanddd-skills介绍绽
AI训练存储选型的演进路线 第一阶段:单机直连时代 早期的深度学习数据集较小,模型训练通常在单台服务器或单张GPU卡上完成。此时直接将数据存储在训练机器的本地NVMe SSD/HDD上。 其优势在于IO延迟最低,吞吐量极高,也就是“数据…...

营销自动化数据驱动 - 多源数据 OLAP 架构演进噬
1. 流图:数据的河流 如果把传统的堆叠面积图想象成一块块整齐堆叠的积木,那么流图就像一条蜿蜒流淌的河流,河道的宽窄变化自然流畅,波峰波谷过渡平滑。 它特别适合展示多个类别数据随时间的变化趋势,尤其是当你想强调整…...

医院综合能源数据采集监控管理系统方案
某医院主要能耗类型为电能和天然气,天然气主要供给燃气锅炉生产生活热水,用能设备包括供配电设施、暖通空调、生活热水机组、照明、医疗卫生设施等。随着医疗需求与医院规模不断扩大,能耗成本也不断提升,主要集中于夏季供冷和冬季…...
基于transformer的clip和blip之间的关系、原理、方法实现和直观可视化
Transformer 是通用的注意力底座架构;CLIP 是把图像和文本映射到同一语义空间做对齐;BLIP 则在图文对齐之外,进一步把“理解”和“生成”放进同一个视觉语言预训练框架里。原始 Transformer 用纯注意力替代 RNN/CNN;CLIP 使用图像…...

如何用Networx精准监控单个应用的网络流量?详细操作步骤解析
如何用Networx精准监控单个应用的网络流量?详细操作步骤解析 在数字化办公环境中,网络流量管理已成为提升效率的关键环节。想象一下这样的场景:团队协作时突然出现网络卡顿,却无法快速定位是哪个应用在占用带宽;或是需…...

使用 C# 删除 PDF 中的数字签名卣
一、 什么是 AI Skills:从工具级到框架级的演化 AI Skills(AI 技能) 的概念最早在 Claude Code 等前沿 Agent 实践中被强化。最初,Skills 被视为“工具级”的增强,如简单的文件读写或终端操作,方便用户快速…...

FREE!ship Plus终极指南:免费开源船舶设计软件完整教程
FREE!ship Plus终极指南:免费开源船舶设计软件完整教程 【免费下载链接】freeship-plus-in-lazarus FreeShip Plus in Lazarus 项目地址: https://gitcode.com/gh_mirrors/fr/freeship-plus-in-lazarus 想要设计专业的船舶模型却苦于高昂的软件费用ÿ…...

在 RAP Action 里接入 BAPI 业务逻辑,让物料分类分配既稳、又能回到事务边界里
在 SAP S/4HANA 的真实项目里,RAP 和经典 BAPI 并存,几乎是绕不开的状态。界面层已经是 Fiori Elements,服务层走的是 OData V4,行为实现放在 behavior pool 里,可真正落库的那段业务逻辑,很多时候仍然压在老牌 BAPI 身上。物料分类分配就是一个很典型的例子,前台看起来…...