数据结构——AVL树
文章目录
- 一.AVL树的定义
- 二.AVL树的插入
- 三.插入后更新平衡因子
- 四.AVL树的旋转
- 1.左单旋
- 2.右单旋
- 3.先左单旋再右单旋
- 4.先右单旋再左单旋
- 五.AVL树的性能分析
- 六.检查是否满足AVL树
- 七.源码
一.AVL树的定义
二叉搜索树虽可以缩短查找的效率,但如果数据有序或接近有序二叉搜索树将退化为单支树,查找元素相当于在顺序表中搜索元素,效率低下。因此,两位俄罗斯的数学家G.M.Adelson-Velskii和E.M.Landis在1962年发明了一种解决上述问题的方法:当向二叉搜索树中插入新结点后,如果能保证每个结点的左右子树高度之差的绝对值不超过1(需要对树中的结点进行调整),即可降低树的高度,从而减少平均搜索长度。
一棵具有以下性质的二叉搜索树:
- 它的左右子树都是
AVL树 - 左右子树高度之差(简称平衡因子)的绝对值不超过1(-1/0/1)
具有以上性质的树被称为AVL树。
如果一棵二叉搜索树是高度平衡的,它就是
AVL树。如果它有n个结点,其高度可保持在 O ( l o g 2 n ) O(log_2 n) O(log2n),搜索时间复杂度O( l o g 2 n log_2 n log2n)。
AVL树节点的定义:
template<class K,class V>
struct AVLTreeNode
{ALVTreeNode<K,V>* _left;AVLTreeNode<K,V>* _right;AVLTreeNode<K,V>* _parent;//父亲节点pair<K, V> _kv;//构造函数AVLTreeNode(const pair<K,V>& kv):_left(nullptr),_right(nullptr),_parent(nullptr),_kv(kv),_bf(0){}int _bf;//平衡因子
};
AVL树的定义:
template<class K,class V>
class AVLTree
{typedef AVLTreeNode<K, V> Node;
public:private:Node* _root=nullptr;
};
二.AVL树的插入
AVL树就是在二叉搜索树的基础上引入了平衡因子,因此AVL树也可以看成是二叉搜索树。那么AVL树的插入过程可以分为两步:
- 按照二叉搜索树的方式插入新节点
- 调整节点的平衡因子
bool Insert(const pair<K, V>& kv)
{if (_root == nullptr){_root = new Node(kv);return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (cur->_kv.first < kv.second){//当前值小于要插入的值,往右边走parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.second){//当前值大于要插入的值,往左边走parent = cur;cur = cur->_left;}else{//有相同的值了,退出插入return false;}}//当cur走到了nullptr,就是找到了要插入的点了cur = new Node(kv);//判断插入在左边还是右边if (parent->_kv.first < kv.first){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;//确定父子关系//…………//更新插入后的平衡因子//…………
}
三.插入后更新平衡因子
新节点插入后,AVL树的平衡性可能会遭到破坏,此时就需要更新平衡因子,并检测是否破坏了AVL树的平衡性
更新平衡因子的规则:
- 新增在右边,则会让父平衡因子
++,新增在左边,父平衡因子-- - 更新后,如果
parent->bf == 0,说明parent插入前的平衡因子是1 or -1,插入填上了矮的一边,parent的子树高度不变,不需要继续往上更新。 - 更新后,如果
parent->bf为1或-1, 说明parent插入前的平衡因子是0,说明左右子树高度相等,插入后有一边高,parnet高度变了,需要继续往上更新。 - 更新后,如果
parent->bf == 2或-2,说明parent插入前的平衡因子是1 or -1,已经到达平衡临界值,parent子树进行旋转处理将树保持平衡。 - 更新后,如果
parent->bf >2或<-2,则说明插入前树已经失去的平衡,要进行代码的检查。
while (parent)
{//更新平衡因子if (cur == parent->_left){parent->_bf--;}else{parent->_bf++;}if (parent->_bf == 0){//没有新增高度break;}else if(abs(parent->_bf)==1){//平衡因子为1,往上面继续找parent = parent->_parent;cur = cur->_parent;}else if (abs(parent->_bf) == 2){//需要旋转了}
}
四.AVL树的旋转
1.左单旋
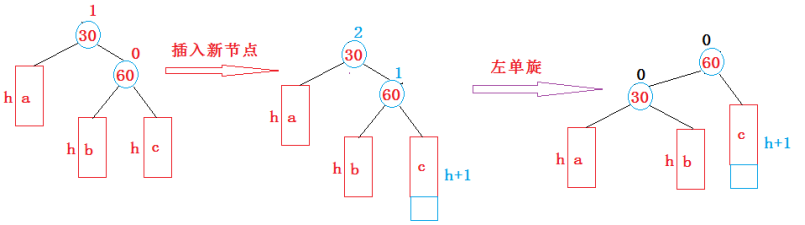
新节点插入较高右子树的右侧—右右:左单旋
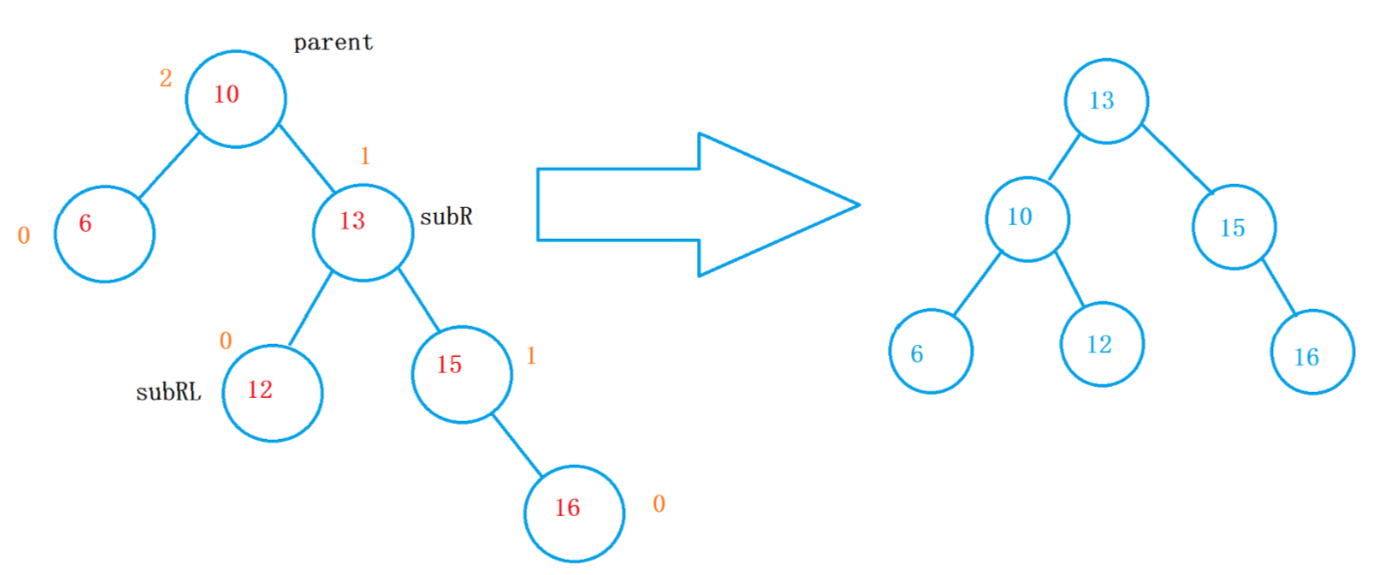
- 将
subR作为一个根节点 - 将
subRL作为parent的右节点(如果subRL存在的话) parent作为subR的左节点。
左旋的条件是
parent->_bf==2&&cur->_bf==1
旋转之后parent的平衡因子为0,subL的平衡因子也是0。
void RotateL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;Node* pparent = parent->_parent;parent->_right = subRL;if (subRL){subRL->_parent = subR;}subR->_left = parent;parent->_parent = subR;if (parent == _root){_root = subR;subR->_parent = nullptr;}else{if (pparent->_left == parent){pparent->_left = subR;}else{pparent->_right = subR;;}subR->_parent = pparent;}subR->_bf = parent->_bf = 0;
}
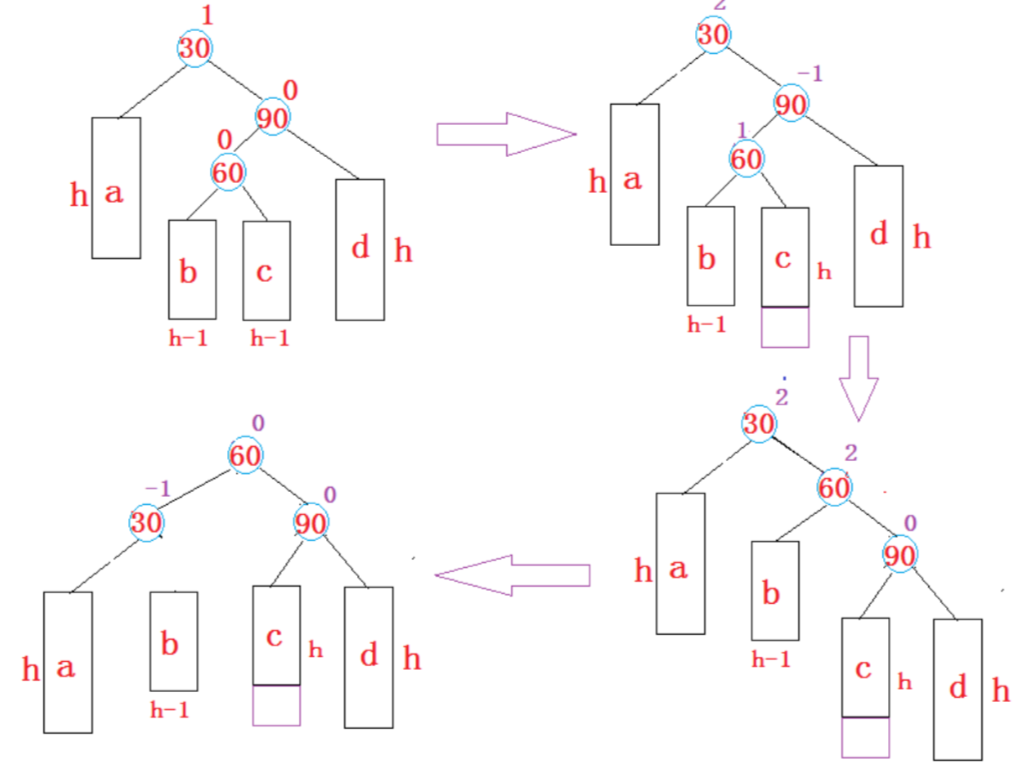
2.右单旋
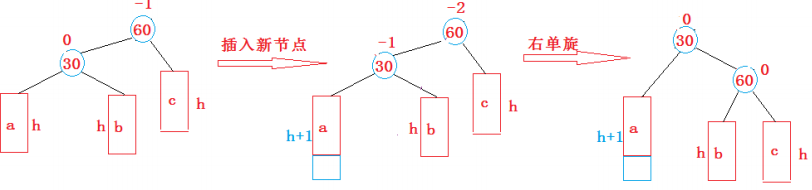
新节点插入较高左子树的左侧—左左:右单旋
- 将
subL作为一个根节点 - 将
subLR作为parent的左节点(如果subLR存在的话) parent作为subL的右子节点。
右旋的条件是
parent->_bf==-2&&cur->_bf==-1
旋转之后parent的平衡因子为0,subL的平衡因子也是0。
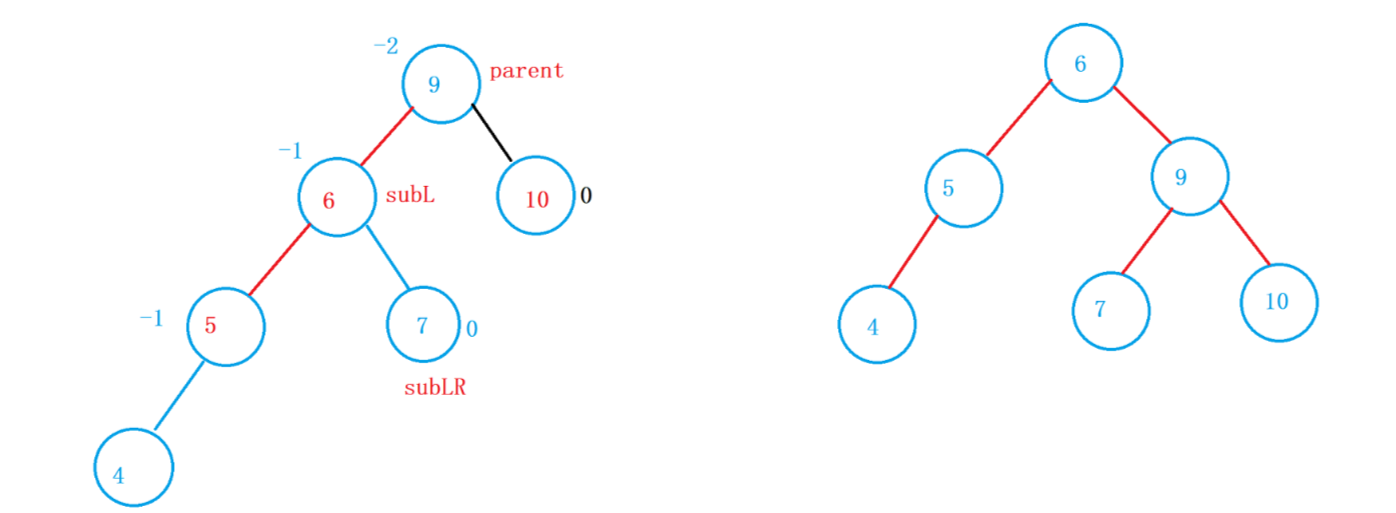
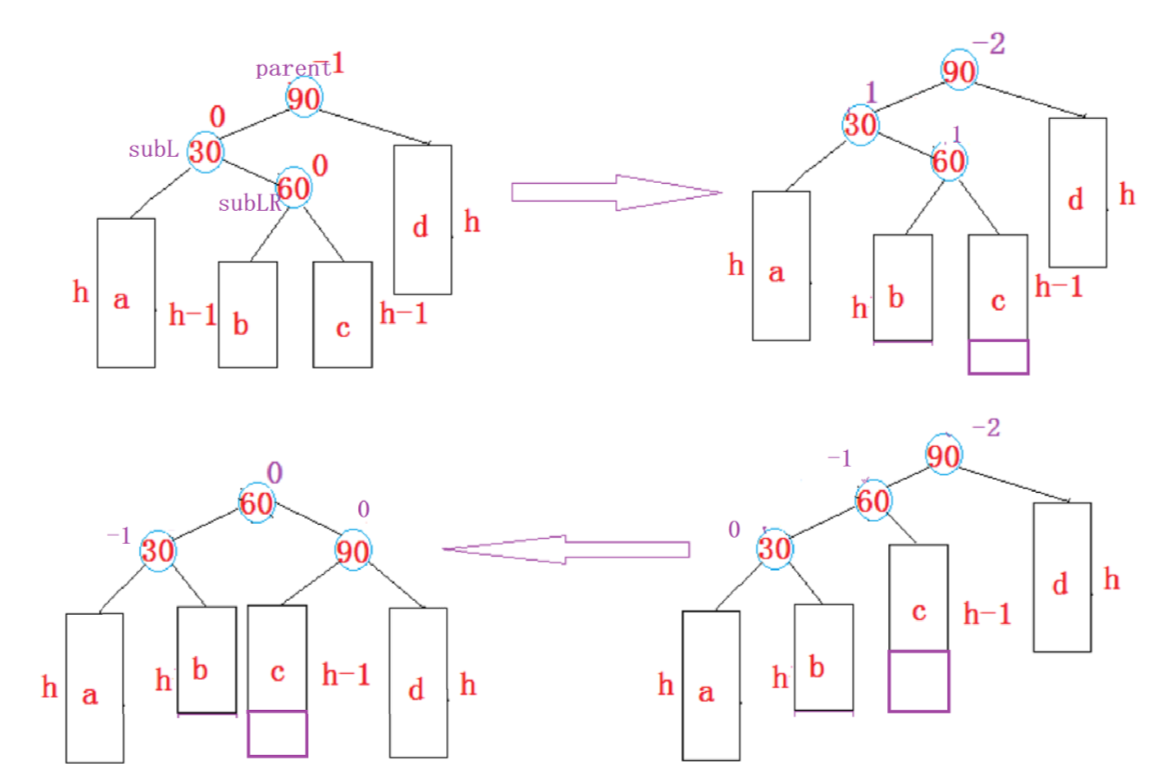
3.先左单旋再右单旋
新节点插入较高左子树的右侧—左右:先左单旋再右单旋
如果将节点插入到c当中,平衡因子就会发生改变,所以这里的平衡因子需要分情况讨论。
这里通过subLR的平衡因子来确定是在左边插入还是在右边插入。
两种情况下subLR都是0。
void RotateLR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL-> _right;int bf = subLR->_bf;//提前存好,旋转后会subLR会发生改变RotateL(parent->_left);RotateR(parent);subLR->_bf = 0;if (bf == 1){//在右边插入parent->_bf = 0;subL->_bf = -1;}else if (bf == -1){parent->_bf = 1;subL->_bf = 0;}else if (bf == 0){//已经平衡了parent->_bf = 0;subL->_bf = 0;}else{//插入存在问题assert(false);}
}
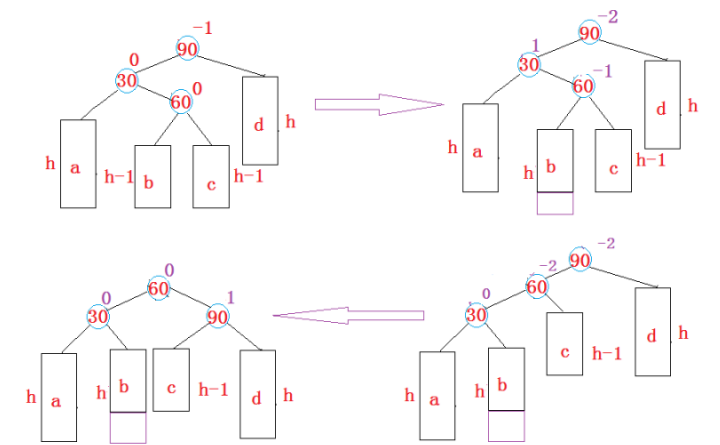
4.先右单旋再左单旋
新节点插入较高右子树的左侧—右左:先右单旋再左单旋
C增加节点之后高度和d一样都是h,将其全部旋转到右边去,然后再通过左旋把30压下去,将60作为根节点。
与左右单旋一样,插入的b还是c需要分别更新平衡因子
void RotateRL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;RotateR(parent->_right);RotateL(parent);subRL->_bf = 0;if (bf == 1){subR->_bf = 0;parent->_bf = -1;}else if (bf == -1){subR->_bf = 1;parent->_bf = 0;}else if (bf == 0){parent->_bf = 0;subR->_bf = 0;}else{assert(false);}
}
五.AVL树的性能分析
AVL树是一棵绝对平衡的二叉搜索树,其要求每个节点的左右子树高度差的绝对值都不超过1,这
样可以保证查询时高效的时间复杂度,即 l o g 2 ( N ) log_2 (N) log2(N)。
但是如果要对AVL树做一些结构修改的操作,性能非常低下,比如:插入时要维护其绝对平衡,旋转的次数比较多,更差的是在删除时,有可能一直要让旋转持续到根的位置。因此:如果需要一种查询高效且有序的数据结构,而且数据的个数为静态的(即不会改变),可以考虑AVL树,但一个结构经常修改,就不太适合。
六.检查是否满足AVL树
通过计算左右子树的高度差来确定是否满足AVL树,因为平衡因子是自己设置的,如果还通过平衡因子来确定的话会不太准。
bool _IsBalance(Node* root)
{if (root == nullptr){return true;}int leftHT = Height(root->_left);int rightHT = Height(root->_right);int diff = rightHT - leftHT;if (diff != root->_bf){cout << root->_kv.first << "平衡因子异常" << endl;return false;}return abs(diff) < 2&& _IsBalance(root->_left)//递归左子树&& _IsBalance(root->_right);//递归右子树
}int Height(Node* root)
{if (root == nullptr)return 0;int left = Height(root->_left);int right = Height(root->_right);return max(left, right) + 1;
}
七.源码
namespace dianxia
{//树的节点template<class K, class V>struct AVLTreeNode{AVLTreeNode<K, V>* _left;AVLTreeNode<K, V>* _right;AVLTreeNode<K, V>* _parent;pair<K, V> _kv;int _bf; // 平衡因子AVLTreeNode(const pair<K, V>& kv):_left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv), _bf(0){}};template<class K, class V>class AVLTree{typedef AVLTreeNode<K, V> Node;public:bool Insert(const pair<K, V>& kv){if (_root == nullptr){_root = new Node(kv);return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else{return false;}}cur = new Node(kv);if (parent->_kv.first > kv.first){parent->_left = cur;}else{parent->_right = cur;}cur->_parent = parent;// 更新平衡因子while (parent){if (cur == parent->_right){parent->_bf++;}else{parent->_bf--;}if (parent->_bf == 1 || parent->_bf == -1){// 继续更新祖先parent = parent->_parent;cur = cur->_parent;}else if (parent->_bf == 0){break;}else if (parent->_bf == 2 || parent->_bf == -2){// 需要旋转处理 -- 1、让这颗子树平衡 2、降低这颗子树的高度 //左单旋if (parent->_bf == 2 && cur->_bf == 1){RotateL(parent);}//右单旋else if (parent->_bf == -2 && cur->_bf == -1){RotateR(parent);}//左右双旋else if (parent->_bf == -2 && cur->_bf == 1){RotateLR(parent);}//右左双旋else if (parent->_bf == 2 && cur->_bf == -1){RotateRL(parent);}else{assert(false);}break;}else{assert(false);}}return true;}void InOrder(){_InOrder(_root);cout << endl;}bool IsBalance(){return _IsBalance(_root);}int Height(){return _Height(_root);}private:int _Height(Node* root){if (root == NULL)return 0;int leftH = _Height(root->_left);int rightH = _Height(root->_right);return leftH > rightH ? leftH + 1 : rightH + 1;}bool _IsBalance(Node* root){if (root == NULL){return true;}int leftH = _Height(root->_left);int rightH = _Height(root->_right);if (rightH - leftH != root->_bf){cout << root->_kv.first << "节点平衡因子异常" << endl;return false;}return abs(leftH - rightH) < 2&& _IsBalance(root->_left)&& _IsBalance(root->_right);}void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL)subRL->_parent = parent;Node* ppnode = parent->_parent;subR->_left = parent;parent->_parent = subR;if (ppnode == nullptr){_root = subR;_root->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = subR;}else{ppnode->_right = subR;}subR->_parent = ppnode;}parent->_bf = subR->_bf = 0;}void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;Node* ppnode = parent->_parent;subL->_right = parent;parent->_parent = subL;if (parent == _root){_root = subL;_root->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = subL;}else{ppnode->_right = subL;}subL->_parent = ppnode;}subL->_bf = parent->_bf = 0;}void RotateLR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf;RotateL(parent->_left);RotateR(parent);if (bf == 1){parent->_bf = 0;subLR->_bf = 0;subL->_bf = -1;}else if (bf == -1){parent->_bf = 1;subLR->_bf = 0;subL->_bf = 0;}else if (bf == 0){parent->_bf = 0;subLR->_bf = 0;subL->_bf = 0;}else{assert(false);}}void RotateRL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;RotateR(parent->_right);RotateL(parent);if (bf == 1){subR->_bf = 0;parent->_bf = -1;subRL->_bf = 0;}else if (bf == -1){subR->_bf = 1;parent->_bf = 0;subRL->_bf = 0;}else if (bf == 0){subR->_bf = 0;parent->_bf = 0;subRL->_bf = 0;}else{assert(false);}}void _InOrder(Node* root){if (root == nullptr){return;}_InOrder(root->_left);cout << root->_kv.first << " ";_InOrder(root->_right);}private:Node* _root = nullptr;};
}
本文到此结束,码文不易,还请多多支持哦!!!
相关文章:
数据结构——AVL树
文章目录 一.AVL树的定义二.AVL树的插入三.插入后更新平衡因子四.AVL树的旋转1.左单旋2.右单旋3.先左单旋再右单旋4.先右单旋再左单旋 五.AVL树的性能分析六.检查是否满足AVL树七.源码 一.AVL树的定义 二叉搜索树虽可以缩短查找的效率,但如果数据有序或接近有序二叉…...

AI写作宝有哪些,分享两种AI写作工具
AI写作宝是一种基于人工智能技术的写作辅助工具。它可以根据用户输入的关键词和主题快速生成文章。AI写作宝可以为用户节省大量的时间和精力,帮助用户快速生成高质量的文章。今天就为大家推荐两款AI写作宝: 一、AI创作家 AI创作家是一款基于人工智能技…...

【uniapp 控制页面滑动速度】
可以使用 uni-app 提供的 onTouchMove 事件来控制页面滑动速度。 可以在 onTouchMove 事件方法中使用 event.deltaY 计算页面滑动的速度,然后根据需要来调整速度值,最后通过 event.preventDefault() 阻止默认的滑动行为,从而实现控制页面滑动…...
)
7-24 整数的分类处理 (20 分)
7-24 整数的分类处理 (20 分) 给定 N 个正整数,要求你从中得到下列三种计算结果: A1 能被 3 整除的最大整数 A2 存在整数 K 使之可以表示为 3K1 的整数的个数 A3 存在整数 K 使之可以表示为 3K2 的所有整数的平均值(精确到小数…...

MYSQL事务同时修改单条记录
疑问:Mysql多事务默认情况下,同时修改同一条记录运行修改吗?是否要手动加上for update行锁。 猜想:MySQL 会自动对涉及的数据行加上写锁(排他锁),以确保数据的一致性和隔离性。这是在默认的事务…...

安装skywalking并集成到微服务项目
文章目录 一、前言二、介绍1. 架构 三、安装skywalking服务端四、启动skywalking服务端五、微服务项目开发注册中心网关服务商品服务订单服务支付服务测试 六、下载java客户端七、微服务集成skywalking客户端1. idea启动2. 命令行启动3. 集成效果4. 服务实例5. 修改服务实例名称…...
做一宿)
一支笔,一双手,一道力扣(Leetcode)做一宿
文章目录 一、分享自己相关的经历二、分析可能存在的问题三、根据问题进行分解或建立思维导图四、分享好用的刷题网站并进行介绍 一、分享自己相关的经历 我是一名计算机专业的学生,之前在学习算法和数据结构时,对于简单题目还算能够顺利地刷过去。但是…...
从入门到精通系列之九:使用kubeadm工具快速安装K8s集群)
Kubernetes(K8s)从入门到精通系列之九:使用kubeadm工具快速安装K8s集群
Kubernetes K8s从入门到精通系列之九:使用kubeadm工具快速安装K8s集群 一、安装kubeadm二、修改kubeadm的默认配置三、下载K8s相关镜像四、运行kubeadm imit命令安装Master节点五、将新的Node加入集群六、安装CNI网络插件七、验证K8s集群是否工作正常八、搭建高可用K8s集群详细…...

RabbitMQ 教程 | 第11章 RabbitMQ 扩展
👨🏻💻 热爱摄影的程序员 👨🏻🎨 喜欢编码的设计师 🧕🏻 擅长设计的剪辑师 🧑🏻🏫 一位高冷无情的编码爱好者 大家好,我是 DevO…...

一分钟完成centos7安装docker
action: 1、下载安装包2、安装docker 1、背景 使用CentOS / Redhat 7 版本的应该偏多。但是,Docker CE在系统中安装的时候,往往会出现一堆依赖包的报错,解决依赖包需要耗费不短的时间。 经验证,目前已找到兼容能力强的版本&am…...

NativePHP:使用PHP构建跨平台桌面应用的新框架
NativePHP是一个用于使用PHP构建桌面应用的框架。它允许PHP开发人员使用熟悉的工具和技术创建跨平台的原生应用。NativePHP具有一系列易于使用的类,一套用于构建和打包应用程序的工具以及一个静态跨平台PHP运行时。 官网地址:https://nativephp.comNati…...
删除这4个文件夹,流畅使用手机无忧
在现代社会中,手机已经成为我们生活中不可或缺的一部分。然而,随着使用时间的增长,我们可能会遇到手机卡顿和内存不足的问题,让我们感到十分困扰。手机卡顿不仅影响使用体验,还可能导致应用程序运行缓慢,甚…...

使用Bert预训练模型处理序列推荐任务
最近的工作有涉及该任务,整理一下思路以及代码细节。 流程 总体来说思路就是首先用预训练的bert模型,在训练集的序列上进行CLS任务。对序列内容(这里默认是token id的sequence)以0.3左右的概率进行随机mask,然后将相…...
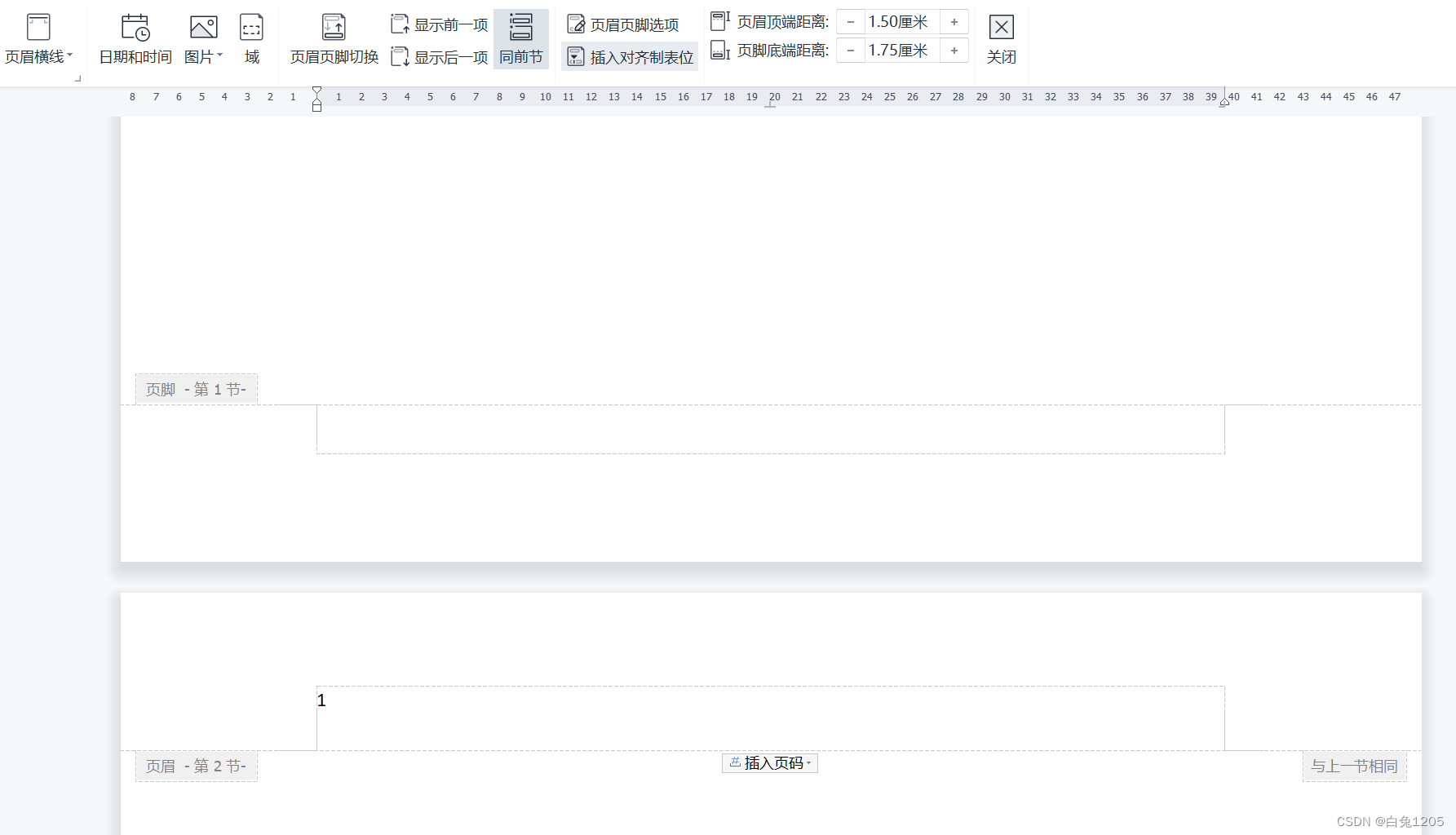
将word每页页眉单独设置
在进行论文排版的时候,总是会出现页眉的页码设置问题,比如出现奇数或偶数页码一致,尝试将前面页码改掉,后面再修改前面也进行了变动,将每页页眉单独设置: (1)在第一页的最后一行输入…...

rust怎么生成随机数?
关注我,学习Rust不迷路!! 在 Rust 中,有几种不同的方法可以实现随机数生成。以下是其中几种常见的方法,以及它们的优缺点: 1. 使用 rand crate: 优点: rand crate 是 Rust 中最常…...
python-Excel数据模型文档转为MySQL数据库建表语句(需要连接数据库)-工作小记
将指定Excel文档转为create table 建表语句。该脚本适用于单一且简单的建表语句 呈现效果 代码 # -*- coding:utf-8 -*- # Time : 2023/8/2 17:50 # Author: 水兵没月 # File : excel_2_mysql建表语句.py import reimport pandas as pd import mysql.connectordb 库名mydb m…...
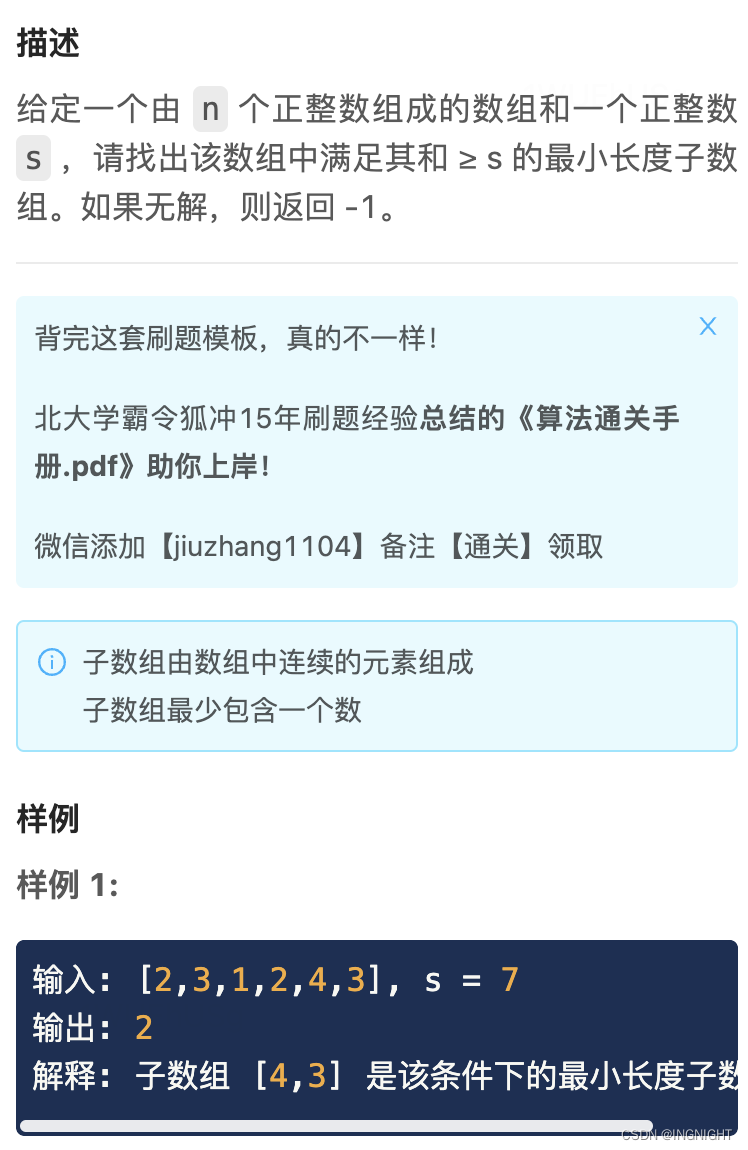
406 · 和大于S的最小子数组
链接:LintCode 炼码 - ChatGPT!更高效的学习体验! 题解:同向双指针 九章算法 - 帮助更多程序员找到好工作,硅谷顶尖IT企业工程师实时在线授课为你传授面试技巧 class Solution { public:/*** param nums: an array …...
 ̄)^)
xray的 webhook如何把它Hook住?^(* ̄(oo) ̄)^
xray webhook xray可以通过webhook传递扫描信息,官方文档也是一笔带过,可能大多数人都不清楚,或者仅仅知道有这么个东西,但是不知道怎么使用,webhook是xray被动监听模式下的一种输出结构和方式。相比输出Json和txt格式…...

浅析RabbitMQ死信队列
原文首发于公众号【CSJerry】 在现代分布式系统中,消息队列扮演着至关重要的角色。它们可以实现应用程序之间的异步通信,并确保数据的可靠传输和处理。而在这个领域中,RabbitMQ作为一种强大而受欢迎的消息队列解决方案,具备了高…...
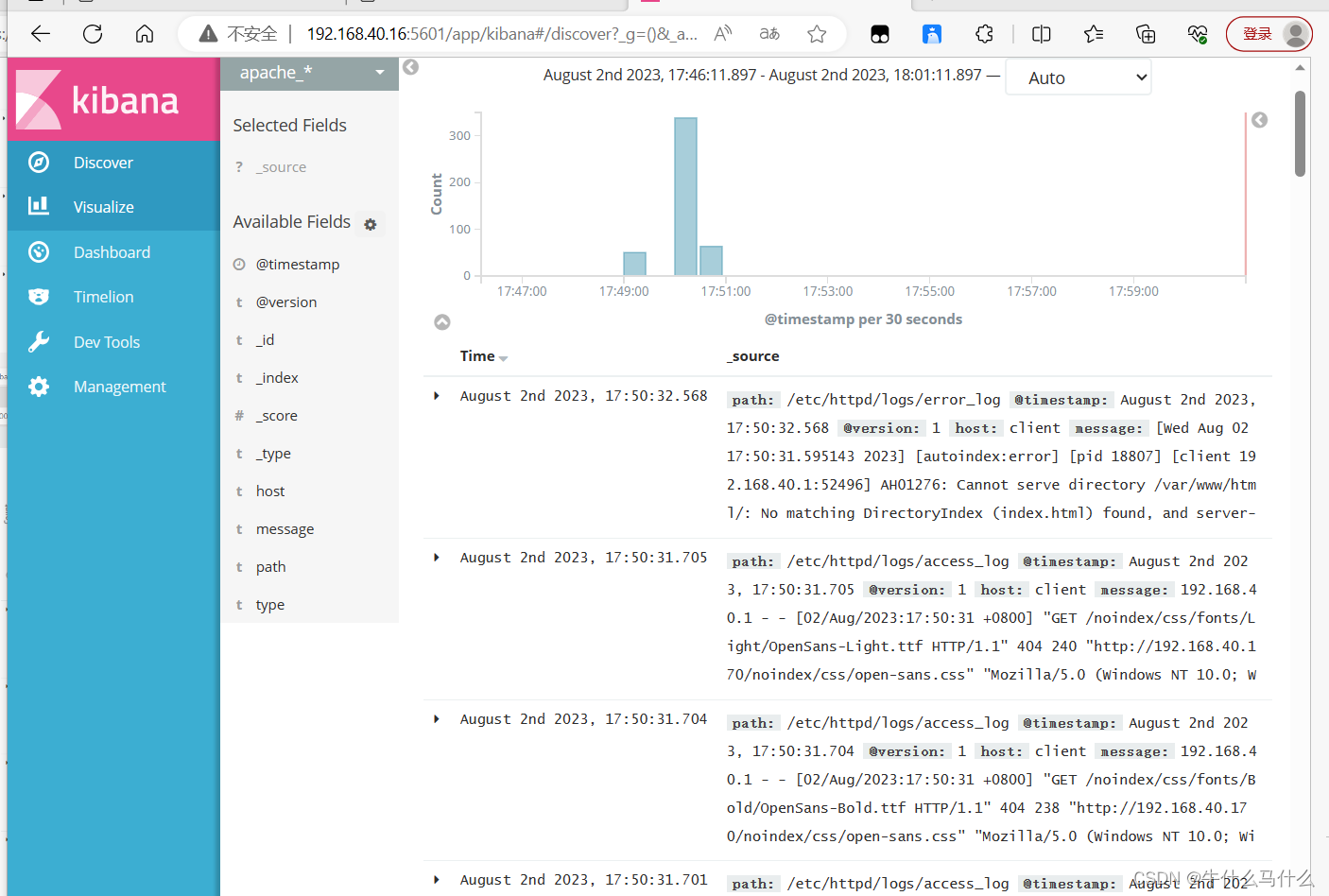
ELK 企业级日志分析系统(ElasticSearch、Logstash 和 Kiabana 详解)
目录 一.ELK简介 1.1ELK的概述 1.2ELK的组成 1.2.1 ElasticSearch 1.2.2 Logstash 1.2.3 Kibana 1.2.4 小总结 1.3可以添加其他组件 1.4filebeat 结合 logstash 带来好处 1.5日志处理的步骤 二.Elasticsearch 2.1Elasticsearch概述 2.2Elasticsearch核心概念 2.2.1接近…...

第4篇:角色设定与上下文管理——让AI扮演专家
第4篇:角色设定与上下文管理——让AI扮演专家适用人群:进阶 | 字数:约25,000字 | 预计阅读时间:60分钟前言 在前面三篇中,我们完成了"入门三部曲":知道了提示词的本质,学会了黄金四步…...

【独家逆向工程实录】:从Perplexity官网前端JS中提取未开放股票接口,附Python动态Token生成脚本
更多请点击: https://codechina.net 第一章:Perplexity股票信息检索 Perplexity AI 公司尚未上市,因此在主流证券交易所(如NYSE、NASDAQ)中并无对应的股票代码或实时行情数据。这一事实对开发者和金融数据集成场景具有…...

如何用智能去重工具高效清理重复图片:AntiDupl.NET完整使用指南
如何用智能去重工具高效清理重复图片:AntiDupl.NET完整使用指南 【免费下载链接】AntiDupl A program to search similar and defect pictures on the disk 项目地址: https://gitcode.com/gh_mirrors/an/AntiDupl 你是否曾面对电脑里杂乱无章的图片库感到束…...

信步SV-33A66嵌入式主板:工业智能终端的核心硬件选型与实战解析
1. 项目概述:为什么嵌入式主板是智能终端的“心脏”?在智能设备无处不在的今天,从街角的自助售货机、医院的医疗检测仪,到工厂的自动化产线,这些看似形态各异的设备背后,都有一个共同的“大脑”在默默工作—…...

别再乱用sudo了!麒麟KYLINOS下用ACL实现安全的精细化权限控制
麒麟KYLINOS权限管理革命:用ACL替代sudo的精细化控制实战 在麒麟KYLINOS操作系统中,许多管理员习惯性地使用sudo或简单粗暴的chmod 777来解决权限问题,这种"一刀切"的做法实际上为系统安全埋下了重大隐患。想象一下这样的场景&…...

KRTS实时内核开发环境搭建:手把手教你配置隔离CPU与Visual Studio联调
KRTS实时内核开发环境搭建:手把手教你配置隔离CPU与Visual Studio联调 在工业自动化、机器人控制和高频交易等硬实时应用领域,毫秒级的延迟差异可能导致整个系统失效。KRTS(Kithara RealTime Suite)作为Windows平台上的实时扩展解…...

飞凌嵌入式i.MX 95xx核心板:高性能边缘计算与安全开发的硬件平台解析
1. 项目概述:一颗新旗舰的落地与嵌入式开发者的新选择最近,NXP(恩智浦)新一代的i.MX 95系列应用处理器正式进入量产阶段,而作为其重要的生态合作伙伴,飞凌嵌入式也同步发布了基于该系列芯片的全新核心板。这…...

强化学习入门:用Python实现Q-Learning算法
在软件测试领域,随着AI技术的不断渗透,掌握强化学习相关知识,能够帮助测试从业者更好地理解智能测试工具的底层逻辑,甚至开发出更高效的自动化测试方案。Q-Learning作为强化学习的经典入门算法,以其简洁的原理和广泛的…...

如何快速掌握Switch文件管理神器:NSC_BUILDER完整新手指南
如何快速掌握Switch文件管理神器:NSC_BUILDER完整新手指南 【免费下载链接】NSC_BUILDER Nintendo Switch Cleaner and Builder. A batchfile, python and html script based in hacbuild and Nuts python libraries. Designed initially to erase titlerights encr…...

Perplexity远程岗申请失败率高达73%?揭秘HR系统自动过滤的4个隐形关键词及规避话术库
更多请点击: https://kaifayun.com 第一章:Perplexity招聘信息搜索 Perplexity AI 作为一家快速发展的生成式人工智能公司,其招聘动态常通过官方渠道及技术社区实时更新。掌握高效、精准的招聘信息检索方法,是开发者与研究人员了…...