重型并串式液压机械臂建模与simscape仿真
一、建模
Hydraulic manipulator
Figure 1 shows different constituting parts of the manipulator considered, with every part labeled using numbers from 1 to 10. For each part, a CAD model is provided. Each file is named in accordance with the corresponding label in Fig. 1 and file names are: 01 BaseGP.STEP, 02 LiftLinkGP.STEP, 03 LiftCylGP.STEP,04 LiftPistGP.STEP, 05 TiltCylGP.STEP, 06 TiltPistGP.STEP, 07 TiltLinkGP.STEP, 08 ExtCyl1GP.STEP,09 ExtPist1GP.STEP, 10 ObjectGP.STEP, respectively.
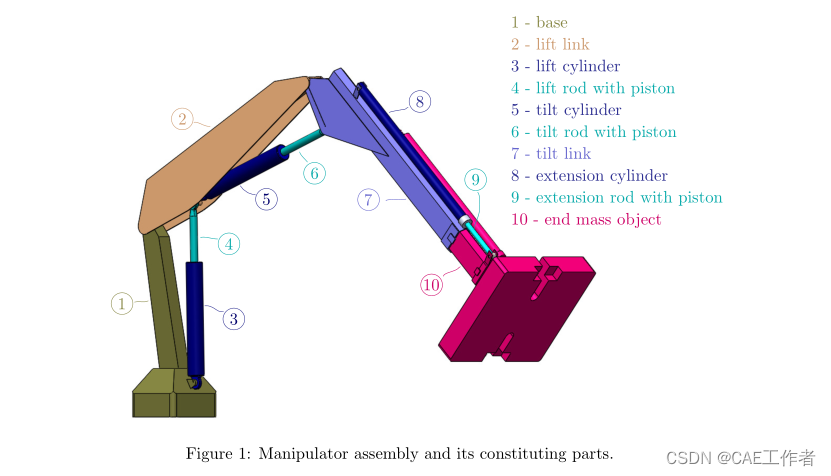
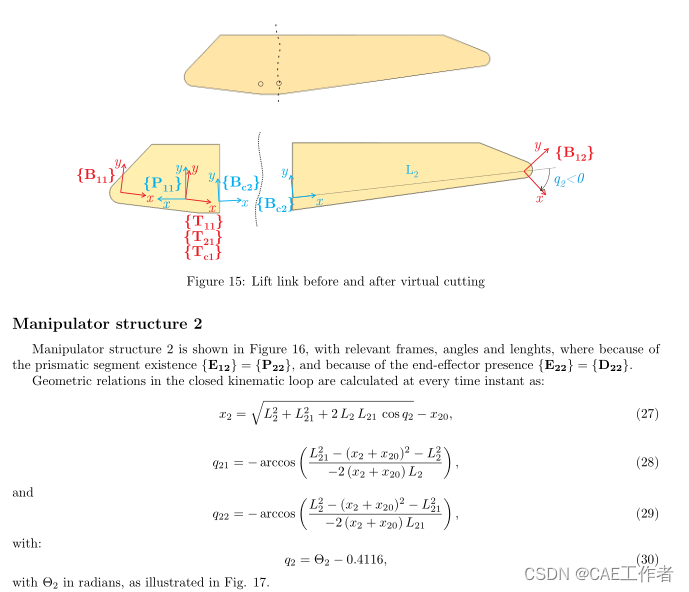
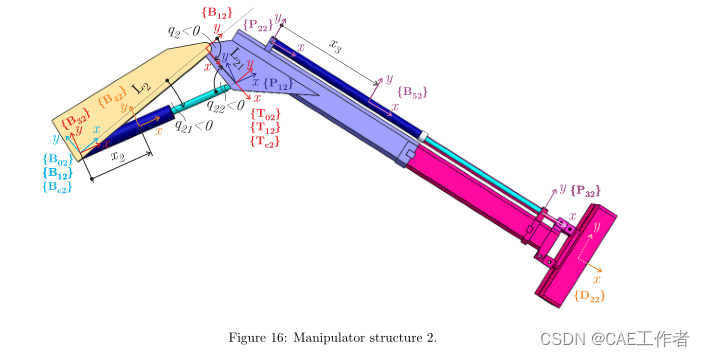
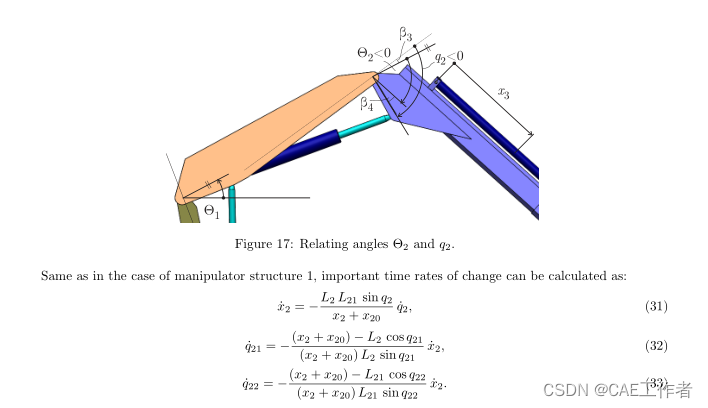
Figure 2 shows the manipulator, conceptually divided into structures in series, as proposed in the paper.The considered manipulator can be divided into two generic manipulator structures. Structure 1 contains onlyrevolute segment, and structure 2 contains both revolute segment with passive revolute joint actuated by a linear hydraulic actuator and prismatic segment with prismatic joint, also actuated by a linear hydraulic actuator.

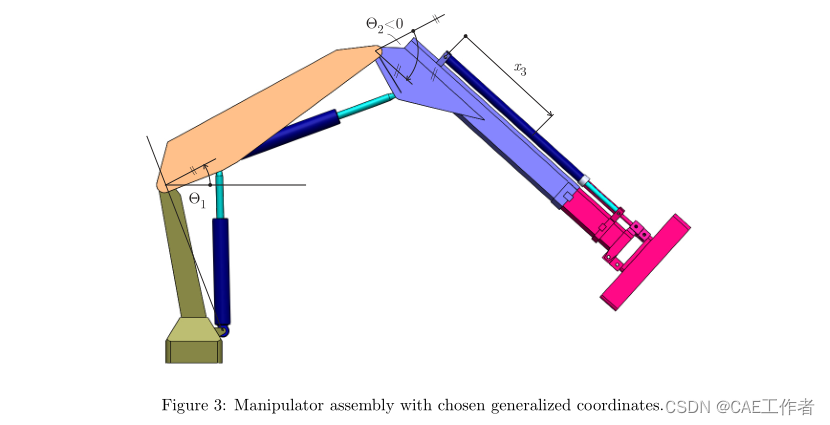
Figure 3 shows the chosen set of generalized coordinates used both in the following analytic expressions and in the Simscape to command the manipulator motion.
Manipulator structure 1
Manipulator structure 1 contains only the revolute segment from Fig.4 − 5, where the notation is inaccordance with the one proposed in the paper. Figure 5 shows the revolute segment 1 with required frames foraddressing the kinematics and dynamics. Since there is no prismatic segment, and a revolute segment follows,frames {E11} and {Bc2} are coincident, {E11} = {Bc2}, and frame {P21} does not exist in the structure 1.
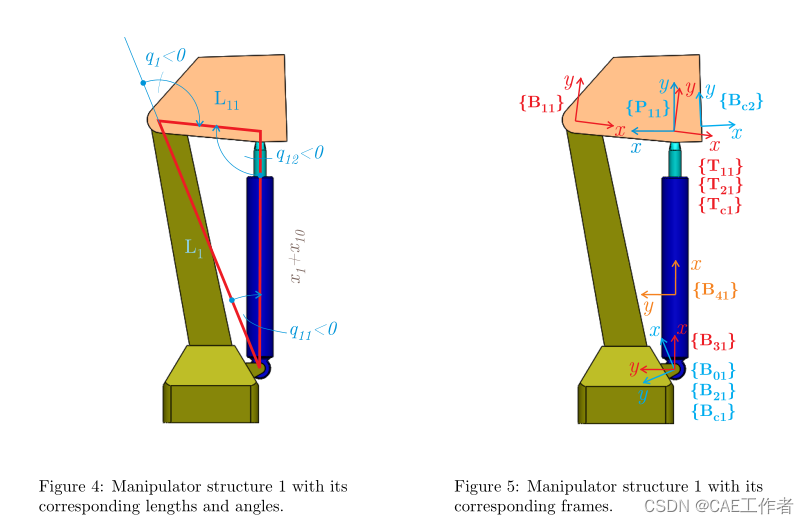
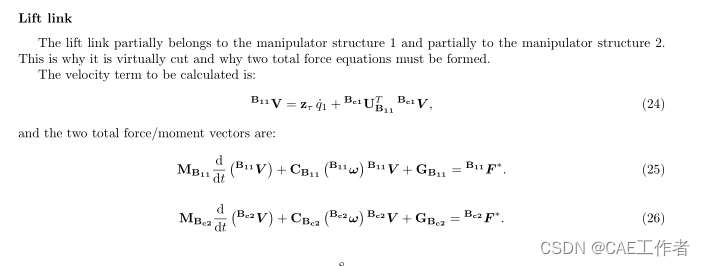
Revolute segment in the manipulator structure 1
It is assumed that linear/angular velocity vector Bc1V is known from previous calculations. Assuming fixed base, this vector is zero vector, Bc1V = 0. All the fixed distances and angles are assumed to be accurately known from CAD models and thus all the constant position vectors, as all the constant rotation matrices.
In addition, all inertia tensors and masses required for dynamics calculations can be obtained from CAD software. Exact numerical values can be found in the attached MATLAB initialization file.
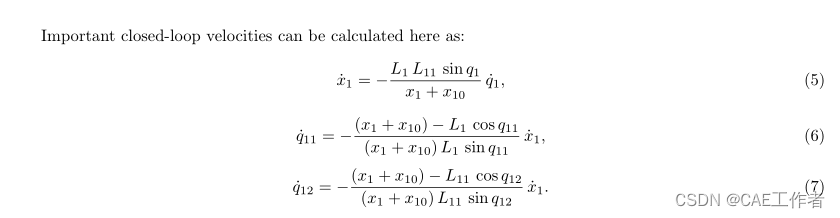
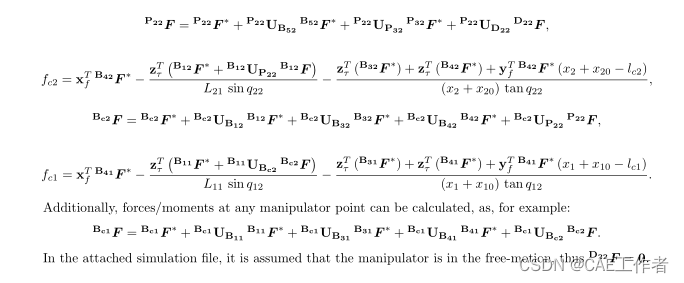
Loop-closure functions
Geometric relations in the closed kinematic loop are calculated at every time instant as: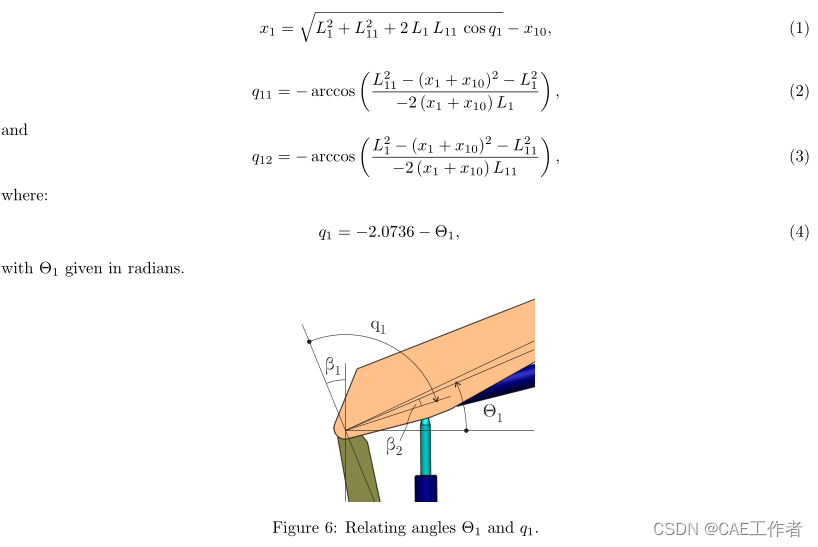
The rationale behind Eq. (4) comes from Fig. 6, with values for β
1 and β 2 found from CAD software asshown in Fig. 7 and defined in the initialization file.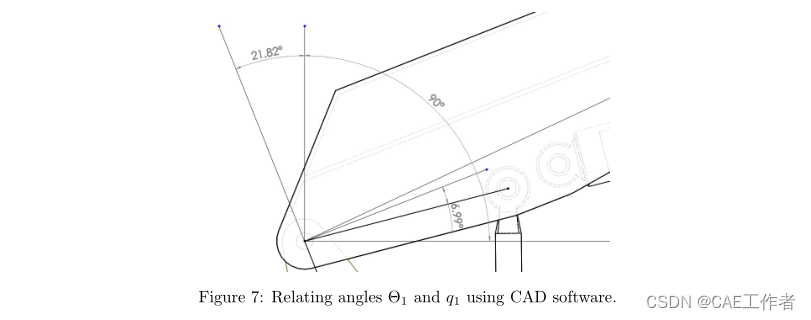
Manipulator base
The manipulator base is shown in more detail in Figure 8 with all the relevant attached frames.
Many
appropriate steps required in the modelling process will be emphasised in the manipulator base case since it is
the first to be considered. The reason for this is to avoid unnecessary repeatability, which would not introduce
much new information. The same approach, shown in more detail once, can be then later applied in the case of
every manipulator part.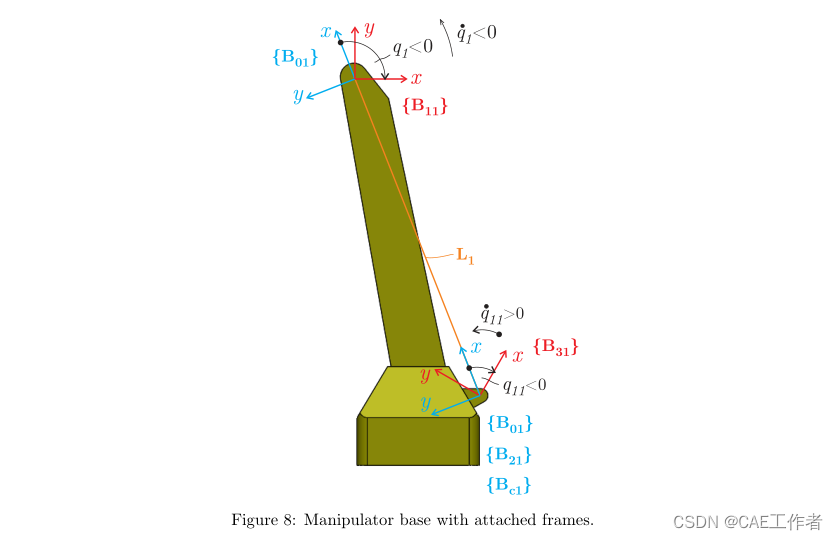
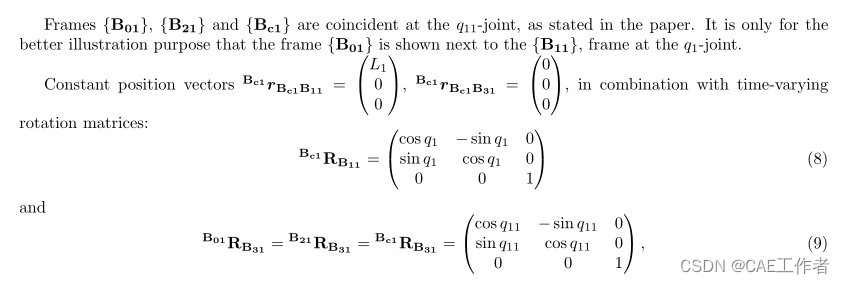
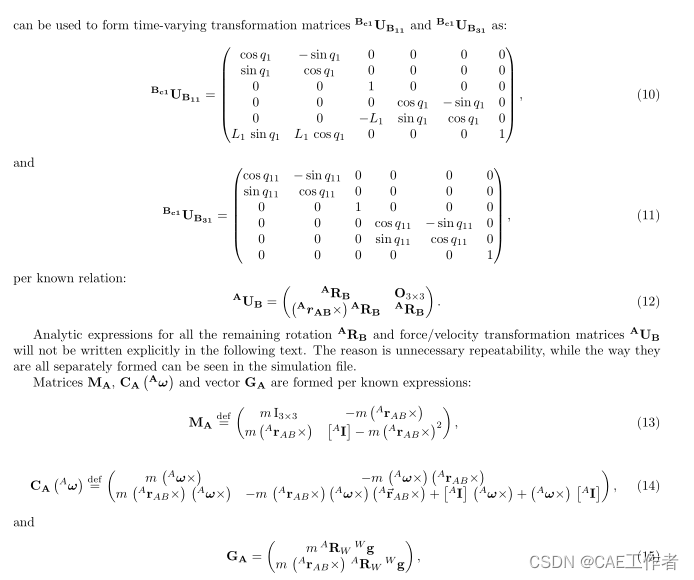

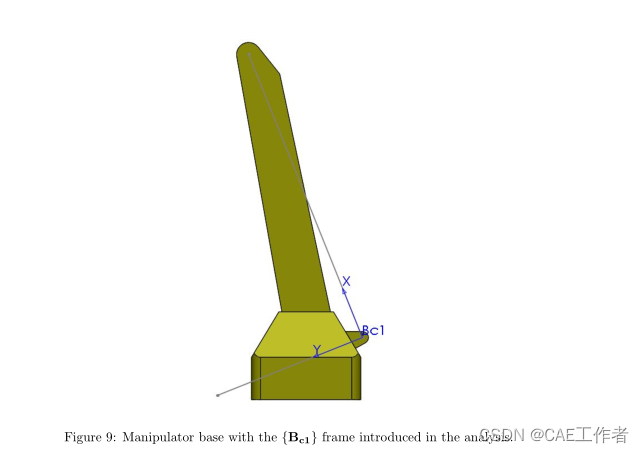
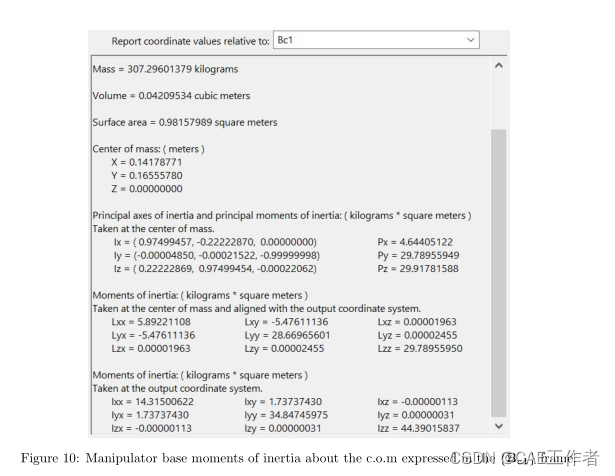
Figure 11: Manipulator base moments of inertia about the c.o.m expressed in the CAD model reference frame.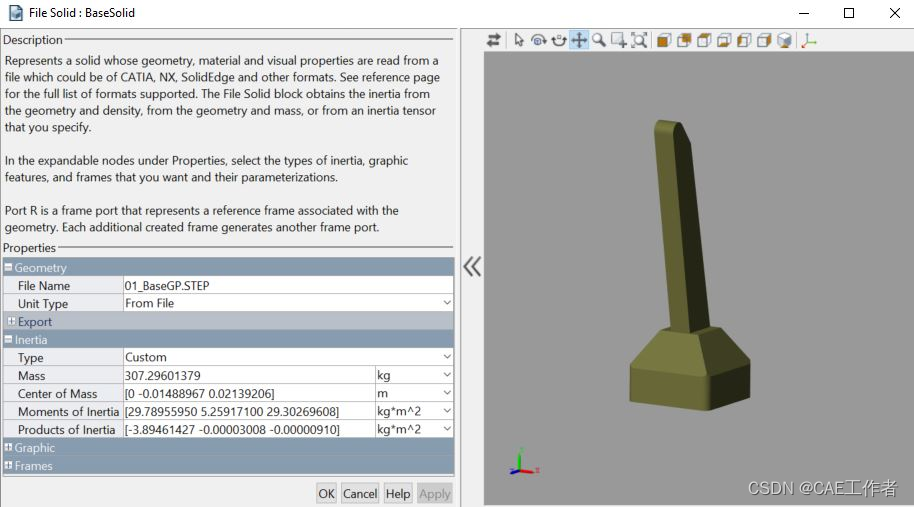



二、simscape仿真
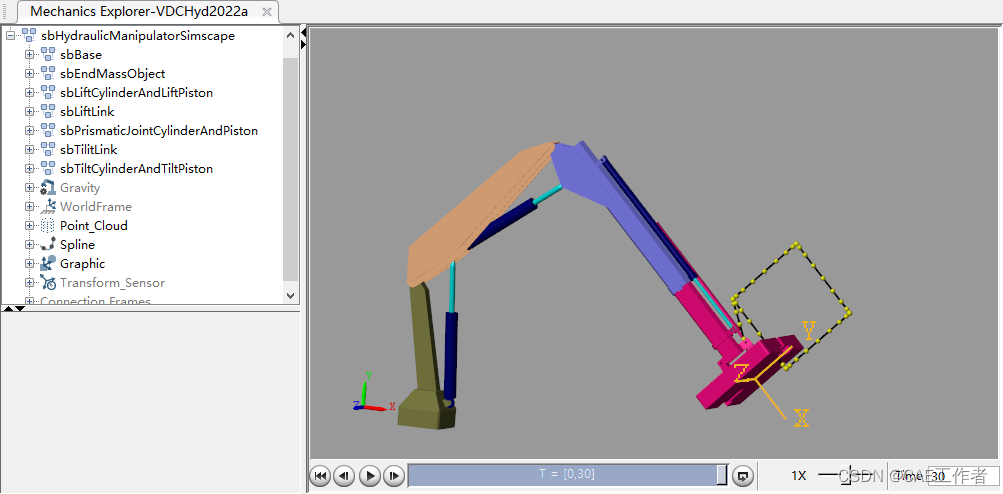
仿真视频如下:
液压控制机械臂simscape仿真
下载咨询链接:matlab正逆运动学分析与轨迹规划]
源文件与仿真模型下载链接
相关文章:
重型并串式液压机械臂建模与simscape仿真
一、建模 Hydraulic manipulator Figure 1 shows different constituting parts of the manipulator considered, with every part labeled using numbers from 1 to 10. For each part, a CAD model is provided. Each file is named in accordance with the corresponding la…...
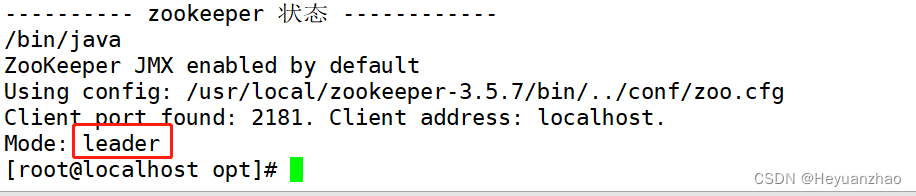
zookeeper的部署
一 先下载zookeeper 二 解压包 三 修改配置文件 四 把配好文件传到其他的节点上面 五 在每个节点的dataDir指定的目录下创建一个 myid 的文件 六 配置zook的启动脚本 七 设置开机自启 八 分别启动 九查看当前状态service zookeeper status 十 总结 一 先下载zookeeper …...
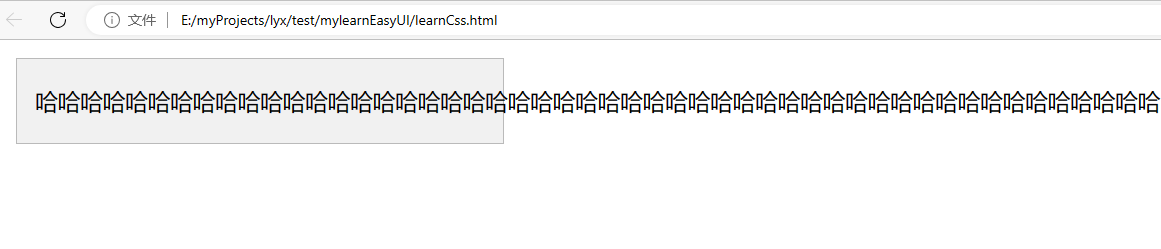
css white-space属性
先看不换行的效果,调用.space类 再来看使用 white-space:nowrap的效果 运行结果如下:...
大数据实战——hadoop集群一键式高可用实现自动故障转移与故障初始化恢复)
(十四)大数据实战——hadoop集群一键式高可用实现自动故障转移与故障初始化恢复
前言 本节内容延续前面几节内容,综合性的实现hadoop集群的高可用以及hadoop集群故障初始化的恢复,通过一个脚本,实现整个集群的高可用启停与状态观测。主要是zookeeper、hdfs、yarn等服务的高可用集群的一键式启停。 正文 hadoop高可用集群整体规划hadoop高可用集群服务规…...

算法-归并排序
给你一个整数数组 nums,请你将该数组升序排列。 输入:nums [5,2,3,1] 输出:[1,2,3,5] 输入:nums [5,1,1,2,0,0] 输出:[0,0,1,1,2,5] 实现思路直接看我录制的视频吧算法-归并排序_哔哩哔哩_bilibili class Solutio…...

【深度学习】StyleGANv2 2019 论文,Analyzing and Improving the Image Quality of StyleGAN
StyleGAN论文: 《A Style-Based Generator Architecture for Generative Adversarial Networks》 论文:https://arxiv.org/abs/1812.04948 代码: https://github.com/NVlabs/stylegan StyleGANv2论文: 《Analyzing and Improving …...

【AI模型系列】火力全开!百度文心3.5三大维度、20项指标国内问鼎!
目录 写在前面 详细介绍 综合性能评估结果 安全合规方面 写在前面 近日,清华大学新闻与传播学院沈阳团队发布《大语言模型综合性能评估报告》(下文简称“报告”)。 报告显示百度文心一言在三大维度20项指标中综合评分国内第一,…...

C++ 多态性——运算符重载
**多态是指同样的消息被不同类型的对象接收时导致不同的行为。**所谓的消息是指对类的成员函数的调用,不同的行为是指不同的实现,也就是调用了不同的函数。 使用同样的“”,就实现了整数之间、浮点数之间、双精度浮点数之间的加法࿰…...
模式)
Java设计模式---工厂方法(Factory Method)模式
说明 工厂方法(Factory Method)模式是一种工厂模式,也叫多态性工厂(Poloymorphic Factory)模式。 工厂方法模式涉及如下角色: 抽象工厂角色:给出具体工厂角色必须实现的接口。具体工厂角色&a…...
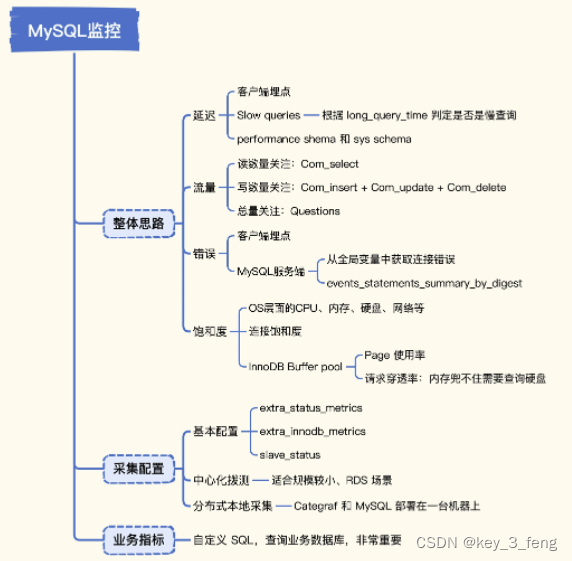
MySQL的关键指标及采集方法
MySQL 是个服务,所以我们可以借用 Google 四个黄金指标的思路来解决问题。 1、延迟 应用程序会向 MySQL 发起 SELECT、UPDATE 等操作,处理这些请求花费了多久,是非常关键的,甚至我们还想知道具体是哪个 SQL 最慢,这样…...

协程怎么解释?Python 中的协程如何实现?Celery 的协程并发引擎如何实现?
文章目录 1. 协程怎么解释?2. 为什么叫协程?3. coroutine 怎么读?4. asyncio 和 gevent 怎么实现协程?4. celery 并发引擎是什么?如何改为协程?5. 一个 celery 服务是否可以同时使用多个不同的引擎? 1. 协…...
Linux:shell脚本:基础使用(2)
test命令 格式1:test 条件表达式 格式2:[ 条件表达式 ] (前后至少应有一个空格) 常用的测试操作符 -d:测试是否为目录(Directory) -e:测试目录或文件是否存在(Exist) -f:测试是否…...

Mir 2.14 正式发布,Ubuntu 使用的 Linux 显示服务器
Canonical 公司最近发布了 Mir 2.14,这是该项目的最新版本。 Mir 2.14 在 Wayland 方面通过 ext-session-lock-v1 协议增加了对屏幕锁定器 (screen lockers) 的支持,并最终支持 Wayland 拖放。此外还整合了渲染平台的实现,放弃了之前在 Raspb…...

合规管理,企业生存之本!这4大方法,助你规避风险
当下,合规管理已成为企业必修的一门学问。无论是上市公司还是民营企业,都面临着日益严苛的监管合规要求。然而,许多企业在在应对频繁更新的合规要求时,仍然手忙脚乱,合规工作参差不齐。 专家分析认为,企业合规困境的主要症结在于,业务运转过程中产生了大量证明文件,但企业对其…...

码云 Gitee + Jenkins 配置教程
安装jdk 安装maven 安装Jenkins https://blog.csdn.net/minihuabei/article/details/132151292?csdn_share_tail%7B%22type%22%3A%22blog%22%2C%22rType%22%3A%22article%22%2C%22rId%22%3A%22132151292%22%2C%22source%22%3A%22minihuabei%22%7D 插件安装 前往 Manage Jen…...

Java重启
Java启动! 前言祖师爷高斯林老爷子冯诺依曼 注释单行注释多行注释文档注释 标识符***【硬性规则】******【软性建议】*** 关键字结尾 前言 其实我在写这篇文章的时候已经完整地学过一遍Java校招需要掌握的大部分知识了,但是在最近找实习的过程中,我发现自己对于一些只是还是模…...

ReactNative 学习笔记
学习使用的开发工具 编译器 VSCode 开发语言工具 TypeScript 重要程度分类 一般 这个程度的知识点主要是达到熟练掌握即可,不用太深入研究和学习。 重要 这个程度的知识点主要是达到熟练掌握,并且内部的原理切要熟记,因为会关联到其他的知…...
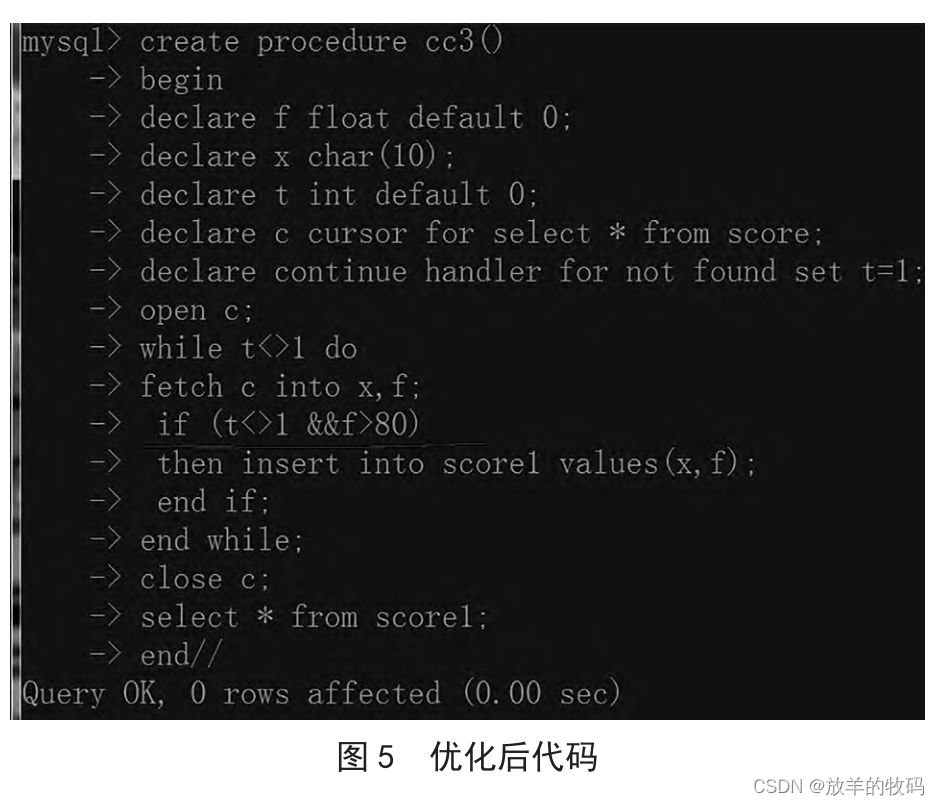
小研究 - MySQL 数据库下存储过程的综合运用研究
信息系统工程领域对数据安全的要求比较高,MySQL 数据库管理系统普遍应用于各种信息系统应用软件的开发之中,而角色与权限设计不仅关乎数据库中数据保密性的性能高低,也关系到用户使用数据库的最低要求。在对数据库的安全性进行设计时…...

CentOS 7 构建 LVS-DR 群集 nginx负载均衡
1、基于 CentOS 7 构建 LVS-DR 群集。 DS(Director Server):DIP 192.168.231.132 & VIP 192.168.231.200 [root132 ~]# nmcli c show NAME UUID TYPE DEVICE ens33 c89f4a1a-d61b-4f24-a260…...

ESP32学习笔记(52)————三轴加速度ADXL345使用(SPI方式)
一、简介 ADXL345 是一款 ADI 公司推出的基于 iMEMS 技术的超低功耗3轴加速度计,分辨率高(13位),测量范围达 16g。数字输出数据为 16 位二进制补码格式,可通过 SPI(3线或4线) 或 I2C 数字接口访问。ADXL345 非常适合移动设备应用。它可以在倾…...
:数组排序、去重、查找)
数组专项(一):数组排序、去重、查找
大家好,欢迎来到《算法面试60讲(2026最新版全真题带解析)》第19篇!上一篇我们彻底吃透了字符串专项的核心难点——BF暴力匹配与KMP高效匹配算法,搞定了字符串模块面试最难的算法考点。从本节课开始,我们正式进入算法面试第一高频模块:数组专项。 在算法面试中,数组是出…...

13456
12356...

GitLab External Wiki代理权限绕过漏洞深度解析
1. 这个漏洞不是“修个补丁”就能完事的——它暴露的是 GitLab 权限模型里一个被长期忽视的逻辑断层GitLab 安全漏洞 CVE-2025-2614,光看编号容易误以为是又一个常规的越权或 XSS 类型漏洞。但我在实际复现和审计过程中发现,它根本不是配置疏漏或代码拼写…...

航空航天为什么离不开高强镁合金?国产替代到哪一步了
飞机每减重一千克,全年大约节省四千两百美元的燃油费用——这是航空工程师熟悉的经验值。在商业航空领域,这个数字还只是财务账;在战斗机、导弹和卫星的世界里,减重的收益被换算成更远的航程、更大的载荷、更高的机动性࿰…...

Windows Cleaner深度解析:5大核心模块彻底解决系统空间不足问题
Windows Cleaner深度解析:5大核心模块彻底解决系统空间不足问题 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner Windows Cleaner是一款完全免费开源的…...

基于TESS光变曲线与深度学习的O型星物理参数预测研究
1. 项目概述与核心挑战在恒星天体物理研究中,大质量O型星扮演着至关重要的角色。它们不仅是宇宙中光度最高的天体之一,其强烈的辐射、恒星风和最终的超新星爆发,更是驱动星系化学演化和能量注入星际介质的关键引擎。然而,深入理解…...

Python strip 与 rstrip 函数区别
Python strip 与 rstrip 函数区别 文章目录Python strip 与 rstrip 函数区别一、核心作用二、基础语法三、基础使用示例四、指定删除特定字符五、常用业务场景一、核心作用 函数作用范围strip()移除字符串首尾空白字符rstrip()仅移除字符串右侧末尾字符,左侧保持不…...
)
Sora 2原生MP4输出不兼容Premiere Pro?揭秘H.264/H.265封装层4大隐性缺陷(附MediaInfo诊断模板+自动修复脚本)
更多请点击: https://codechina.net 第一章:Sora 2原生MP4输出不兼容Premiere Pro的根源定位 Sora 2生成的原生MP4文件虽符合ISO/IEC 14496-14规范,但其底层封装结构与Adobe Premiere Pro对时间码、元数据及视频流编码参数的严格校验逻辑存在…...

如何用OpenHRMS打造企业级人力资源管理系统:30+模块完全指南
如何用OpenHRMS打造企业级人力资源管理系统:30模块完全指南 【免费下载链接】OpenHRMS 项目地址: https://gitcode.com/gh_mirrors/op/OpenHRMS 还在为繁琐的人力资源管理头疼吗?🤔 面对员工考勤、薪酬计算、绩效评估等复杂流程&…...

机器学习在宇宙中微子快味转换检测中的实践:从逻辑回归到天体物理模拟集成
1. 项目概述:当机器学习遇见宇宙深处的“幽灵粒子” 在宇宙最狂暴的舞台——核心坍缩超新星(CCSN)和双中子星并合(NSM)事件的中心,上演着一场肉眼无法观测的微观物理盛宴。这里的主角是中微子,这…...